Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ПОДВЕСНОГО АГРЕГАТА ЗАПРАВКИ
Вид РИД
Изобретение
Изобретение относится к авиационной технике, а именно - к подвесным агрегатам заправки (ПАЗ), обеспечивающим дозаправку летательных аппаратов топливом в полете.
Известна система управления ПАЗ, которая обеспечивает управление исполнительными устройствами ПАЗ по заранее заданному алгоритму управления («Унифицированный подвесной агрегат заправки УПАЗ». Руководство по технической эксплуатации С11А-7000-00 РЭ, ОАО «НПП «Звезда», 1989 г.).
Известная система управления ПАЗ, согласно Руководству по технической эксплуатации, содержит блок программного управления и блок связи с исполнительными устройствами.
Существенными недостатками известной системы управления ПАЗ являются следующие:
1. Жестко заданный алгоритм работы системы управления ПАЗ, реализованный на базе релейной автоматики, и вытекающая из этого невозможность изменения данного алгоритма без функциональной и конструктивной доработки и замены блоков системы управления ПАЗ.
2. Невысокий срок службы элементов релейной автоматики системы управления ПАЗ в условиях повышенной вибрации и расширенного температурного диапазона работы ПАЗ.
3. Отсутствие в системе управления ПАЗ информационных каналов в стандарте ARINC-429 (ГОСТ 18977-79, РТМ 1495-75), описывающем основные функции и необходимые физические и электрические интерфейсы для цифровой информационной системы самолета, используемого для передачи данных эксплуатации ПАЗ в современные бортовые системы самолетов.
4. Отсутствие в системе управления ПАЗ информационных каналов передачи данных эксплуатационной информации ПАЗ для диагностики работы ПАЗ в наземных условиях.
Задачей изобретения является улучшение эксплуатационных характеристик системы управления ПАЗ для повышения уровня автоматизации и упрощения процесса заправки.
Поставленная задача решается тем, что в систему управления ПАЗ дополнительно введены блок входного преобразователя уровня сигналов, блок мультиплексора, канал связи с бортовыми системами самолета в стандарте ARINC-429 (ГОСТ 18977-79, РТМ 1495-75), канал связи с системами диагностики в стандарте RS-422 (ГОСТ 18145-81, ГОСТ 23675-79), а в блок связи с исполнительными устройствами дополнительно введен блок электронных ключей и блок выходного преобразователя уровня сигналов.
На чертеже представлена структурная схема заявляемой системы управления ПАЗ.
Заявляемая система управления ПАЗ состоит из блока входного преобразователя уровня сигналов 1, блока мультиплексора 2, блока программного управления 3, блока связи с исполнительными устройствами 4 (состоящего из блока электронных ключей 5 и блока выходного преобразователя уровня сигналов 6), канала связи с бортовыми системами самолета 7, двунаправленного канала связи с системами диагностики 8.
Выход блока входного преобразователя уровня сигналов 1 подключен к входу блока мультиплексора 2. Выход блока мультиплексора 2 подключен к первому входу блока программного управления 3. Второй вход блока программного управления 3 доступен для ввода сигналов диагностики по каналу связи с системами диагностики 8, не входящими в состав заявляемой системы управления ПАЗ. Первый выход блока программного управления 3 подключен к блоку электронных ключей 5 блока связи с исполнительными устройствами 4, второй выход блока программного управления 3 связан каналом связи 7 с бортовыми системами самолета, не входящими в состав заявляемой системы управления ПАЗ. Выход блока электронных ключей 5 подсоединен к входу блока выходного преобразователя уровня сигналов 6.
Разделяется полетный и наземный режим работы системы управления ПАЗ.
В полетном режиме работа заявляемой системы управления ПАЗ происходит следующим образом.
Сигналы от первичных преобразователей ПАЗ и сигналы от щитка управления ПАЗ, не входящих в состав заявляемой системы управления, поступают в блок входного преобразователя уровня 1, выполняющего нормализацию входных сигналов в диапазоне 0…+5В, пригодных для ввода и обработки данных в цифровых каналах системы управления ПАЗ. Нормализованные сигналы поступают в блок мультиплексора 2, который обеспечивает поочередное переключение входных каналов с заранее заданной частотой опроса.
Блок мультиплексора 2 позволяет увеличивать число входных каналов без изменения аппаратной реализации системы управления ПАЗ. Сигналы с выхода блока мультиплексора 2 поступают на вход блока программного управления 3.
Функция блока программного управления 3 заключается в выполнении алгоритма работы системы управления ПАЗ. На основании комбинации входных сигналов и текущего режима работы ПАЗ блок программного управления 3 формирует выходные сигналы управления.
Блок программного управления 3 реализуется с помощью перепрограммируемого микроконтроллера, допускающего обновление своего программного обеспечения без выполнения демонтажа или конструктивной доработки заявляемой системы управления ПАЗ.
Выходные сигналы от блока программного управления 3 поступают в блок электронных ключей 5 и блок выходного преобразователя уровня сигналов 6, которые выполняют формирование управляющих сигналов в виде разовых команд (ГОСТ 18977-79), предназначенных для управления исполнительными устройствами ПАЗ, не входящими с состав заявляемой системы управления ПАЗ.
Одновременно с этим блок программного управления 3 выдает информационные сигналы по каналу связи 7 в стандарте ARINC-429 (ГОСТ 18977-79, РТМ 1495-75) на бортовые системы самолета, не входящие в систему управления ПАЗ.
Блок электронных ключей 5 имеет существенно более высокий срок службы по сравнению с релейной автоматикой известной системы, что является необходимым требованием для работы системы управления ПАЗ в условиях повышенной вибрации и расширенного температурного диапазона.
В наземном режиме работы заявляемой системы управления ПАЗ выполняется предполетный и послеполетный контроль работы ПАЗ, который происходит следующим образом.
Дополнительно к сигналам, поступающим в систему управления ПАЗ в полетном режиме работы, в блок входного преобразователя уровня 1 также поступают сигналы от щитка встроенного контроля ПАЗ, не входящего в систему управления ПАЗ. В них включены управляющие сигналы, служащие для перевода системы управления ПАЗ в режим контроля работы ПАЗ. При приеме данных сигналов блок программного управления 3 начинает выполнять тестирующие процедуры контроля работы ПАЗ. По результатам выполнения данных процедур блок программного управления 3 формирует управляющие сигналы для выполнения индикации результатов контроля, поступающие в блок электронных ключей 6 и блок выходного преобразователя уровня сигналов 7, на исполнительные устройства ПАЗ и щиток встроенного контроля ПАЗ, не входящие в состав системы управления ПАЗ.
Одновременно с этим блок программного управления 3 выдает информационные сигналы результатов контроля ПАЗ по каналу связи 7 в стандарте ARINC-429 (ГОСТ 18977-79, РТМ 1495-75) для индикации результатов контроля ПАЗ на бортовых системах самолета, не входящих в систему управления ПАЗ.
Индикация результатов контроля работы ПАЗ содержит признак успешного или неуспешного выполнения процедуры контроля работы ПАЗ.
В остальном работа заявляемой системы управления ПАЗ в наземном режиме осуществляется аналогично ее полетному режиму работы.
Также в наземном режиме работы системы управления ПАЗ возможно выполнение диагностики работы системы управления ПАЗ с помощью наземной системы диагностики, не входящей в состав системы управления ПАЗ, работающей под управлением специального программного обеспечения. Диагностика выполняется путем двунаправленной передачи команд и данных по каналу 8, поддерживающему стандарт последовательного обмена RS-422 (ГОСТ 18145-81, ГОСТ 23675-79).
Наземная система диагностики в соответствии со специальным протоколом обмена выполняет посылку команды диагностики по каналу 8 в блок программного управления 3 системы управления ПАЗ. При принятии команды диагностики блок программного управления 3 выполняет данную команду, формирует ответную посылку и отправляет ее по каналу 8 для обработки в наземной системе диагностики.
Также в наземном режиме работы возможно выполнение обновления программного обеспечения блока программного управления 3, что позволяет изменять алгоритм работы заявляемой системы управления ПАЗ без ее конструктивной доработки. Процедура обновления выполняется в соответствии со специальным протоколом передачи данного обновления в блок программного управления 3 по каналу 8 от наземной вычислительной системы, не входящей в состав системы управления ПАЗ.
Система управления подвесного агрегата заправки, состоящая из блока программного управления подвесного агрегата заправки и блока связи с исполнительными устройствами подвесного агрегата заправки, отличающаяся тем, что в ее состав дополнительно введены блок входного преобразователя уровня сигналов, блок мультиплексора, двунаправленный канал связи с системами диагностики, канал связи с бортовыми системами, а в блок связи с исполнительными устройствами дополнительно введены блок электронных ключей и блок выходного преобразователя уровня сигналов, причем выход входного преобразователя уровня сигналов подключен к входу блока мультиплексора, выход блока мультиплексора подключен к первому входу блока программного управления, а второй вход блока программного управления доступен для ввода сигналов по каналу связи с системами диагностики, не входящими в систему управления подвесного агрегата заправки, первый выход блока программного управления подключен к блоку электронных ключей блока связи с исполнительными устройствами, второй выход блока программного управления соединен с помощью канала связи с бортовыми системами самолета с внешним приемником информации, не входящим в систему управления подвесного агрегата заправки, а выход блока электронных ключей блока связи с исполнительными устройствами подсоединен к входу блока выходного преобразователя уровня сигналов управления.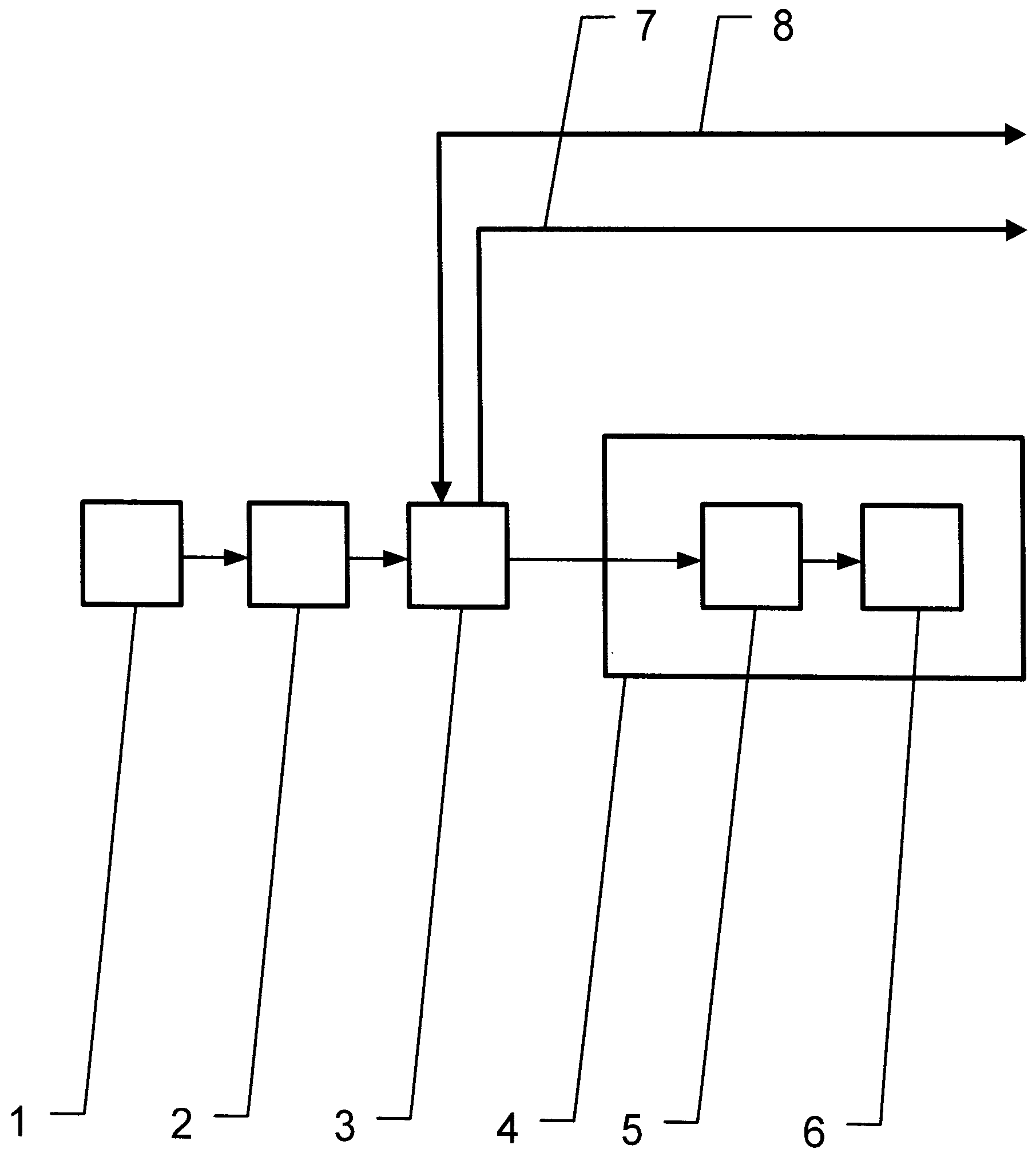
Амортизатор одностороннего действия с регулируемой энергоемкостью
Поверочный стенд
Система аварийного спасения экипажа самолета методом катапультирования
Газогенератор
Конус-датчик агрегата заправки топливом в полете
Способ торможения катапультного кресла и система для его осуществления
Мягкая оболочка скафандра и способ ее крепления к жестким узлам скафандра
Система регистрации сигналов электромагнитных устройств
Способ стабилизации конуса-датчика агрегата заправки топливом в полете
Кресло космонавта
Амортизатор одностороннего действия с регулируемой энергоемкостью
Поверочный стенд
Система аварийного спасения экипажа самолета методом катапультирования
Газогенератор
Конус-датчик агрегата заправки топливом в полете
Способ торможения катапультного кресла и система для его осуществления
Мягкая оболочка скафандра и способ ее крепления к жестким узлам скафандра
Система регистрации сигналов электромагнитных устройств
Способ стабилизации конуса-датчика агрегата заправки топливом в полете
Кресло космонавта

