Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к ракетной технике, а именно к способам и системам ориентации космического летательного аппарата.
Известен способ ориентации космического аппарата, заключающийся в измерении сигнала угла и сигнала угловой скорости, формировании сигнала задания и формировании сигнала управления космическим аппаратом [1].
Известно устройство для реализации способа ориентации космического аппарата, содержащее последовательно соединенные первый сумматор, первый усилитель, второй сумматор, двигатель-маховик, третий сумматор, космический аппарат, датчик угловой скорости и датчик угла, а выход второго усилителя соединен со вторым входом второго сумматора [1].
Недостатками известных способа и устройства для его реализации является низкая точность и надежность процесса ориентации и системы ориентации в случае ограниченного ресурса времени нормального функционирования датчиков угла и угловой скорости космического аппарата.
С целью исключения указанных недостатков известного способа и устройства его реализации способ ориентации космического аппарата отличается тем, что формируют сигнал оценки угла и сигнал оценки угловой скорости космического аппарата, определяют сигнал разности сигнала угла и сигнала оценки угла, определяют сигнал разности сигнала угловой скорости и сигнала оценки угловой скорости и определяют скорректированный сигнал оценки угла и скорректированный сигнал оценки угловой скорости соответственно по формулам
ε - сигнал разности угла и сигнала оценки угла;
 - сигнал разности сигнала угловой скорости и сигнала оценки угловой скорости;
- сигнал разности сигнала угловой скорости и сигнала оценки угловой скорости;
 - скорректированный сигнал оценки угла;
- скорректированный сигнал оценки угла;
 - скорректированный сигнал оценки угловой скорости;
- скорректированный сигнал оценки угловой скорости;
 - сигнал начальной оценки угла;
- сигнал начальной оценки угла;
 - сигнал начальной оценки угловой скорости,
- сигнал начальной оценки угловой скорости,
и формируют сигнал управления с использованием скорректированного сигнала оценки угла и скорректированного сигнала оценки угловой скорости.
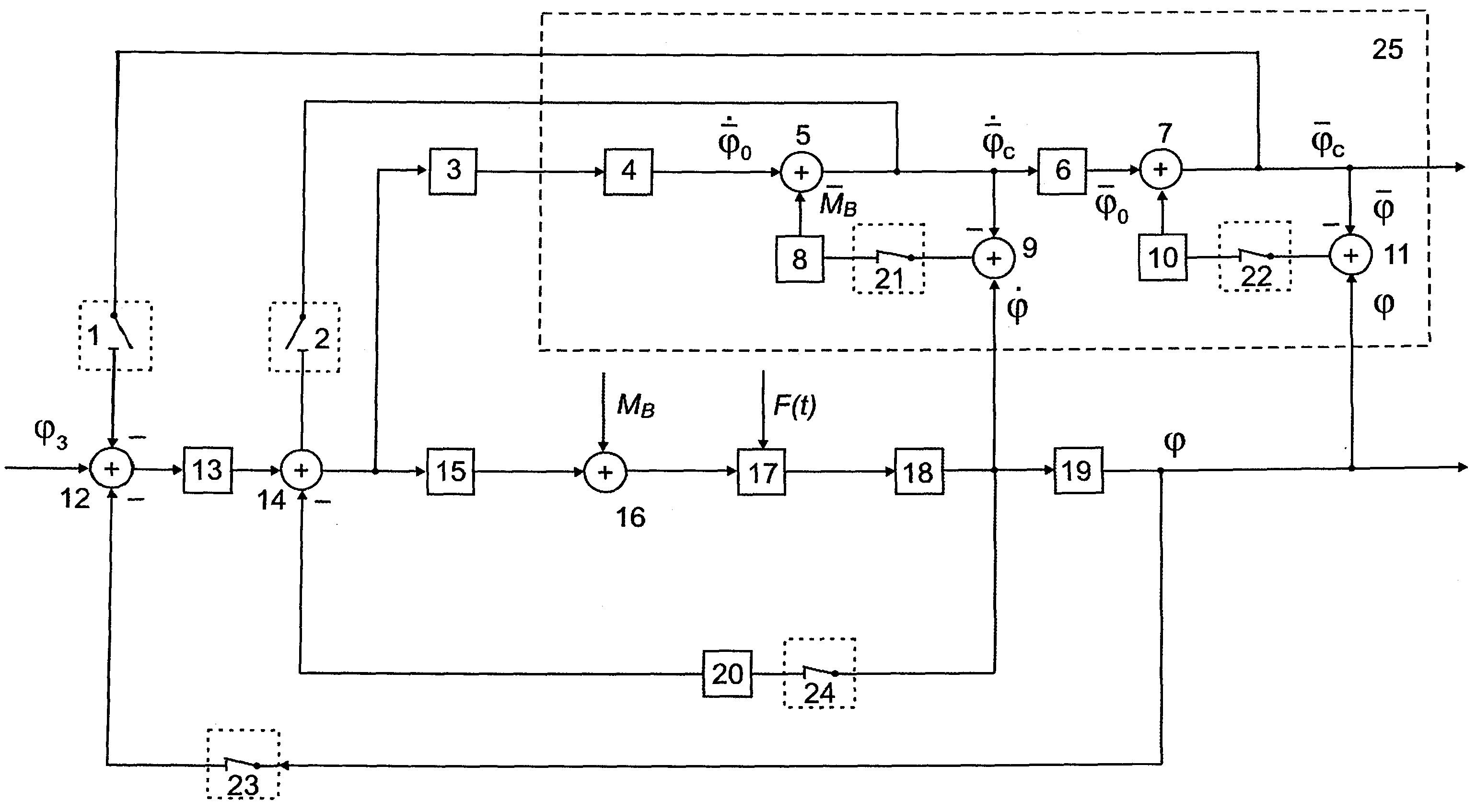
Устройство, реализующее способ ориентации космического аппарата, отличается тем, что оно содержит модель двигателя-маховика, четыре интегратора, четыре сумматора, четыре нормально замкнутых переключателя, два нормально разомкнутых переключателя, выход второго сумматора через последовательно соединенные модель двигателя-маховика, первый интегратор, четвертый сумматор, второй интегратор, пятый сумматор, шестой сумматор, первый нормально замкнутый переключатель, третий интегратор соединен со вторым входом пятого сумматора, выход которого соединен через первый нормально разомкнутый переключатель со вторым входом первого сумматора, выход четвертого сумматора через последовательно соединенные седьмой сумматор, второй нормально замкнутый переключатель и четвертый интегратор подключен ко второму входу четвертого сумматора, выход которого через второй нормально разомкнутый переключатель соединен с третьим входом второго сумматора, выход датчика угловой скорости соединен со вторым входом седьмого сумматора и через третий нормально-замкнутый переключатель - со входом второго усилителя.
На чертеже представлено устройство для коррекции параметров математической модели космического аппарата, на котором приняты следующие обозначения:
1, 2 - первый и второй нормально разомкнутые переключатели соответственно,
3 - модель двигателя-маховика,
4 - первый интегратор,
5 - четвертый сумматор;
6 - второй интегратор,
7 - пятый сумматор,
8 - четвертый интегратор,
9 - седьмой сумматор,
10 - третий интегратор,
11 - шестой сумматор,
12 - первый сумматор,
13 - первый усилитель,
14 - второй сумматор,
15 - двигатель-маховик,
16 - третий сумматор,
17 - космический аппарат,
18 - датчик угловой скорости,
19 - датчик угла,
20 - второй усилитель,
21, 22, 23, 24 - второй, первый, третий нормально замкнутые переключатели соответственно,
25 - модель космического аппарата.
Функционирует устройство для ориентации космического аппарата согласно заявленному способу ориентации следующим образом.
На входы первого сумматора 12 поступает сигнал угла φ(t) поворота космического аппарата (КА) и сигнал задания φз(t), разность φз(t)-φ(t) через первый усилитель 13 поступает на вход второго сумматора 14, на другой вход которого с датчика угловой скорости 18 через последовательно соединенные третий нормально замкнутый переключатель 24 и второй усилитель 20 поступает сигнал угловой скорости  . При этом на выходе второго сумматора 14 получается сигнал управления U(t), который через исполнительное устройство - двигатель-маховик - 15 воздействует на космический аппарат 17, изменяя его ориентацию в пространстве.
. При этом на выходе второго сумматора 14 получается сигнал управления U(t), который через исполнительное устройство - двигатель-маховик - 15 воздействует на космический аппарат 17, изменяя его ориентацию в пространстве.
Кроме того, на космический аппарат 17 действует аддитивная внешняя помеха MB и мультипликативная помеха F(t). Последняя сказывается на изменении во времени момента инерции J(t) космического аппарата.
Параллельно последовательно соединенным двигателю-маховику 15, космическому аппарату 17, датчику угловой скорости 18 и датчику угла 19 включены модель двигателя-маховика 3 и два интегратора 4 и 6 с сумматорами 5 и 7 на их выходах.
При условии, что датчик угловой скорости 18 и датчик угла 19 точно и мгновенно измеряют соответственно угловую скорость  и угол φ, то можно считать, что на выходах первого интегратора 4 и второго интегратора 6 получаем некоторые оценки угловой скорости
и угол φ, то можно считать, что на выходах первого интегратора 4 и второго интегратора 6 получаем некоторые оценки угловой скорости  и угла
и угла  соответственно. При этом пунктиром на чертеже обведена модель 25 космического аппарата 17 совместно с датчиком угловой скорости 18 и датчиком угла 19.
соответственно. При этом пунктиром на чертеже обведена модель 25 космического аппарата 17 совместно с датчиком угловой скорости 18 и датчиком угла 19.
Ввиду того, что на модель 25 космического аппарата аддитивная помеха MB и F(t) не действуют, то  на выходе первого интегратора 4 не равна
на выходе датчика угловой скорости 18, а
на выходе первого интегратора 4 не равна
на выходе датчика угловой скорости 18, а  на выходе второго интегратора 6 не равна φ на выходе датчика угла 19.
на выходе второго интегратора 6 не равна φ на выходе датчика угла 19.
Для получения скорректированного сигнала оценки угловой скорости  используются седьмой сумматор 9, второй нормально-замкнутый переключатель 21 и четвертый интегратор 8. В результате получаем
используются седьмой сумматор 9, второй нормально-замкнутый переключатель 21 и четвертый интегратор 8. В результате получаем
где 
- начальная оценка угловой скорости,
аналогично действует шестой сумматор 11, первый нормально-замкнутый переключатель 22 и третий интегратор 10, которые на выходе пятого сумматора 7 позволяют получить скорректированный сигнал оценки угла 
где 
В результате при условии, что датчик угловой скорости 18 и датчик угла 19 исправны, на выходах четвертого сумматора 5 и пятого сумматора 7 получаем сигналы оценки  и
и  соответственно. Другими словами, модель 25 космического аппарата будет повторять измерения реальных датчика угловой скорости 18 и датчика угла 19.
соответственно. Другими словами, модель 25 космического аппарата будет повторять измерения реальных датчика угловой скорости 18 и датчика угла 19.
Теперь можно одновременно подать команду (не указаны) на переключатели 1, 2, 21, 22, 23 и 24, чтобы переключатели 1 и 2 замкнулись, а переключатели 21, 22, 23 и 24 разомкнулись. При этом информация о состоянии космического аппарата 17 будет получаться с выходов модели 25 космического аппарата 17, т.е. с выходов четвертого 5 и пятого 7 сумматоров, а интеграторы 8 и 10 запомнят те смещения для
и
соответственно, которые обеспечивают равенства
 и
и 
Эти равенства могут поддерживаться достаточно долго при условии, что помеха MB и J(t) имеют малые скорости изменения.
Следовательно, использование модели 25 космического аппарата 17 при отказах датчика угловой скорости 18 и датчика угла 19 позволят обеспечить точное ориентирование космического аппарата 17 и надежность устройства, реализующего способ ориентации.
Изобретательский уровень изобретения по способу и устройству его реализации подтверждается отличительными частями формулы изобретения.
Технический результат от использования изобретения заключается в повышении точности и надежности ориентации космического аппарата.
Литература
1. Васильев В.Н. Системы ориентации космических аппаратов. / В.Н.Васильев. - М.: ФГУП «НПП ВНИИЭМ», 2009 г. С.149-156.
Способ коррекции времени включения маршевого двигателя разгонного блока на участке доразгона
Способ формирования сигнала управления рулевым приводом беспилотного летательного аппарата и устройство для его осуществления
Клиновой зажим
Способ формирования цифроаналогового адаптивного сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Способ защиты от сбоев и отказов электронного блока космического аппарата, вызываемых внешними воздействующими факторами, и устройство для его осуществления
Широкопольный датчик положения солнца
Способ формирования сигналов управления для рулевых приводов беспилотного летательного аппарата и устройство для его осуществления
Способ изготовления стальных корпусов для углекислотных огнетушителей
Электромагнитный двигатель для поворота на заданный угол
Устройство с фиксирующими элементами для механических испытаний
Способ формирования сигнала управления электронагревателем печи и устройство для его осуществления
Бортовая система управления температурой электронагревателя печи с режимами нагрев - стабилизация температуры - охлаждение
Способ формирования сигнала управления непринудительным охлаждением электронагревателя печи и устройство для его осуществления
Бортовая цифроаналоговая адаптивная система управления движением летательного аппарата по крену
Адаптивная система управления высотой полета летательного аппарата
Способ формирования цифроаналогового адаптивного сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Способ интегрирования сигнала рассогласования для астатических систем автоматического регулирования и устройство для его осуществления
Система автоматического управления беспилотным летательным аппаратом по углу крена
Способ формирования сигнала управления боковым движением летательного аппарата и устройство для его осуществления
Способ защиты от сбоев и отказов электронного блока космического аппарата, вызываемых внешними воздействующими факторами, и устройство для его осуществления

