Результат интеллектуальной деятельности: НЕЧЕТКИЙ АДАПТИВНЫЙ ПОЗИЦИОННЫЙ СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ С ДИСКРЕТНЫМИ ИСПОЛНИТЕЛЬНЫМИ УСТРОЙСТВАМИ
Вид РИД
Изобретение
Настоящее изобретение относится к способу автоматического управления с нечеткой адаптивной позиционной логикой, реализованному с помощью логического контроллера.
Областью применения изобретения являются технологические объекты с дискретными исполнительными устройствами (инфракрасные системы отопления, насосные станции, системы отопления с моноблочными теплогенераторами, вентиляционные системы, объекты с исполнительными устройствами на шаговых двигателях или с одним исполнительным устройством, но с дискретными значениями управления), то есть объекты, где экономически выгодно и технологически целесообразно применение дискретных исполнительных устройств или исполнительного устройства с дискретными значениями управления.
Известен «Способ автоматического управления и следящая система для его осуществления» [см. патент RU 2296355, МПК G05B 11/01], заключающийся в применении нечеткой логики для анализа сигнала ошибки, задающего сигнала и его производной, а также для формирования сигнала коррекции.
Недостатком данного способа является то, что результатом коррекции является лишь повышение точности компенсации нелинейностей типа "люфт" и "зона нечувствительности".
Известен «Способ построения систем нечеткой логики и устройство для его реализации» [см. патент RU 2417442, МПК G06N 7/02], заключающийся в построении систем нечеткой логики, при котором сначала формулируют последовательность правил нечеткой логики, затем каждому из этих правил назначают числовую характеристику - показатель качества управления, причем правила нечеткой логики реализованы на базе обученной нейронной сети и каждое из правил нечеткой логики реализуют отдельным фрагментом обученной большой искусственной нейронной сети.
Недостатком данного способа является большое количество правил и сложная реализация управления, требующая применения высокопроизводительной вычислительной техники.
Известен «Способ автоматического трехпозиционного регулирования» [см. авторское свидетельство №458812, МПК G05B 11/16] с аналоговой адаптацией значения средней позиции к нагрузке объекта в момент воздействия на него одного из значений крайних позиций и в сторону значения воздействующей крайней позиции.
Недостатком данного способа является то, что его сложно применить для объектов с дискретными исполнительными устройствами в силу аналоговой адаптации средней позиции.
Аналогичный способ с дискретной перенастройкой и дискретным управлением исполнительным устройством объекта реализован в «Пневматическом позиционном регуляторе» [см. авторское свидетельство №1554628, МПК G06B 11/56], заключающийся в применении в конструкции пневматического регулятора дискретной перенастройки значения средней позиции и дискретного управления исполнительным устройством.
Недостатком данного способа является то, что при подстройке значения средней позиции в момент воздействия на объект одного из значений крайних позиций имеет место значительный выбег регулируемой величины при переходе управляющего параметра со значения предшествующей средней позиции на значение крайней и далее на значение новой адаптивной средней позиции. Кроме того, объект подвержен сильному возмущению дискретным значением крайней позиции - максимальной или минимальной из возможного диапазона значений параметра управления.
Наиболее близким техническим решением, принятым за прототип, является способ управления насосами ливневой канализации, описанный в книге видных японских специалистов: «Прикладные нечеткие системы»: Пер. с япон. / Под ред. Т. Тэрано, К. Асаи, М. Сугэно. - М.: Мир, - 1993, С.123-140, заключающийся в применении нечеткого адаптивного управления.
Недостатками прототипа являются большое количество правил управления и сравнительно медленная адаптация.
Задачей заявленного изобретения является уменьшение количества правил и ускорение адаптации.
Техническим результатом предлагаемого способа является простота реализации, улучшение качества регулирования, повышение надежности функционирования за счет существенного уменьшения количества правил и более оперативного управления.
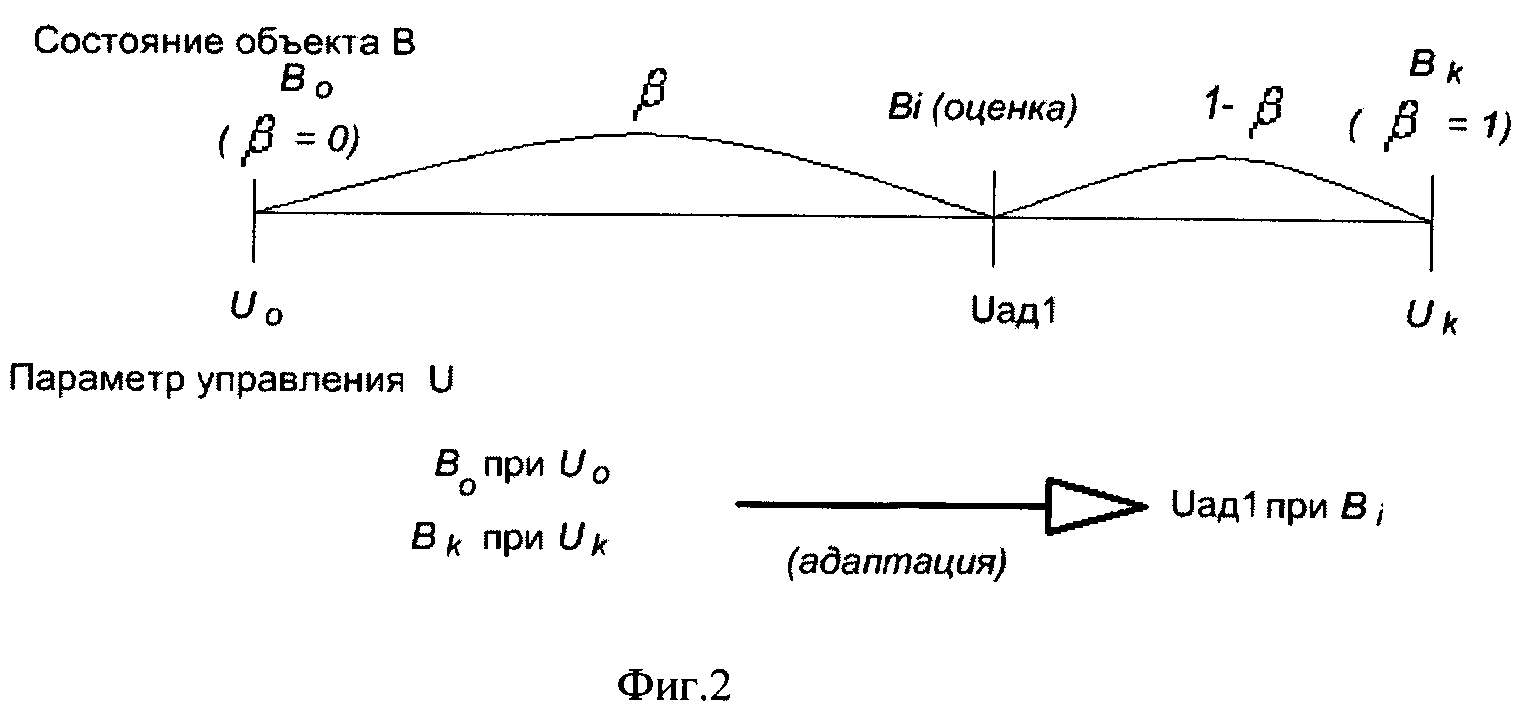
Технический результат достигается за счет того, что используется нечеткий адаптивный позиционный способ автоматического управления объектами с дискретными исполнительными устройствами (далее способ), реализуемый посредством логического контроллера и заключающийся в формировании параметров управления по нечетким правилам и подаче этих параметров управления на объект, отличающийся тем, что формирование параметров управления разделено на два уровня, на первом из которых с помощью нечеткой логики локализуется (выделяется) диапазон регулирования, в котором будет производиться дальнейшая адаптация, причем локализация диапазона регулирования производится путем определения основного (базового) значения параметра управления этого диапазона по формуле:
Uад1=Uo(1-β)+Ukβ,
где Uад1 - адаптируемый параметр управления, Uo и Uk - параметры управления в двух крайних (противоположных) состояниях В объекта, β - нормированный эквивалент состояния объекта (β=0 при Во, β=1 при Bk, где Во - начальное состояние объекта, Вk - конечное состояние объекта), принимаемого за значение параметра адаптивной средней позиции на данном диапазоне, а на втором уровне значение параметра управления определяется с помощью адаптивного трехпозиционного способа регулирования, в котором адаптируется средняя позиция, под значения параметров крайних позиций диапазона, выбираемых так, чтобы общее число позиций в диапазоне составляло не менее 3-х и не более 5-ти.
Способ отличающийся тем, что в случае одного исполнительного устройства с дискретными значениями управления основное (базовое) значение параметра управления первого уровня и значение параметра управления второго уровня определяются по тем же правилам, но для дискретных значений этого исполнительного устройства.
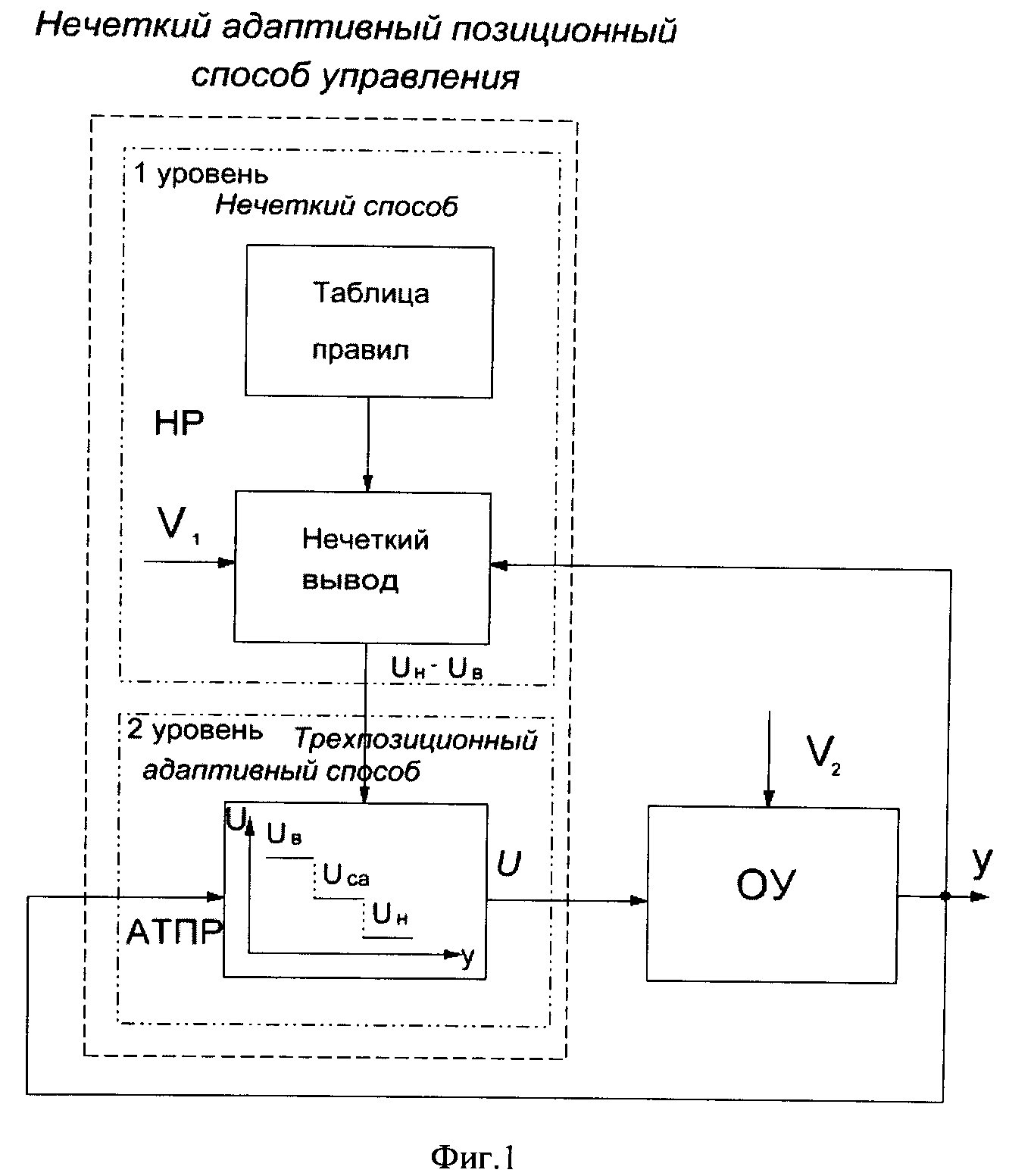
Суть предлагаемого способа заключается в применении двухуровневого алгоритма с разной логикой управления на каждом из них (фиг.1, где ОУ - объект управления, HP - нечеткий регулятор, АТПР - адаптивный трехпозиционный регулятор, V1, V2 - величины, являющиеся причиной необходимости адаптации (возмущения, изменения параметров объекта и др.), Uв, Uн - границы значений управления в локализованном диапазоне регулирования (Uв - верхнее и Uн - нижнее значения параметра управления при адаптации на втором уровне), Uса - адаптируемое среднее положение управляющего воздействия, у - регулируемая технологическая величина, характеризующая состояние В объекта, U - управляемый параметр, который может принимать значения от Uo (начальное значение) до Uk (конечное значение):
- на первом уровне с помощью нечеткой логики локализуется (выделяется) диапазон регулирования, в котором будет производиться дальнейшая адаптация второго уровня;
- на втором уровне управление производится с помощью дискретного трехпозиционного способа регулирования, в котором адаптируется средняя позиция.
Локализация диапазона регулирования на первом уровне производится по правилам нечеткой логики, определенным с помощью формулы, написанной по аналогии с прототипом:
Uад1=Uo(1-β)+Ukβ,
где Uад1 - адаптируемое значение параметра управления на первом уровне, Uo и Uk - значения параметра управления в двух крайних (противоположных) состояниях - нулевом Uo и конечном Uk, β - нормированный эквивалент состояния В объекта (β=0 при Во, β=1 при Bk, где Во и Bk - состояние объекта при управлении Uo и Uk - соответственно).
Параметр Uад1 правил управления в состоянии Вi определяется как взвешенное среднее с весами 1/β и 1/(1-β) параметров Uo и Uk управления в состояниях Во и Bk объекта соответственно.
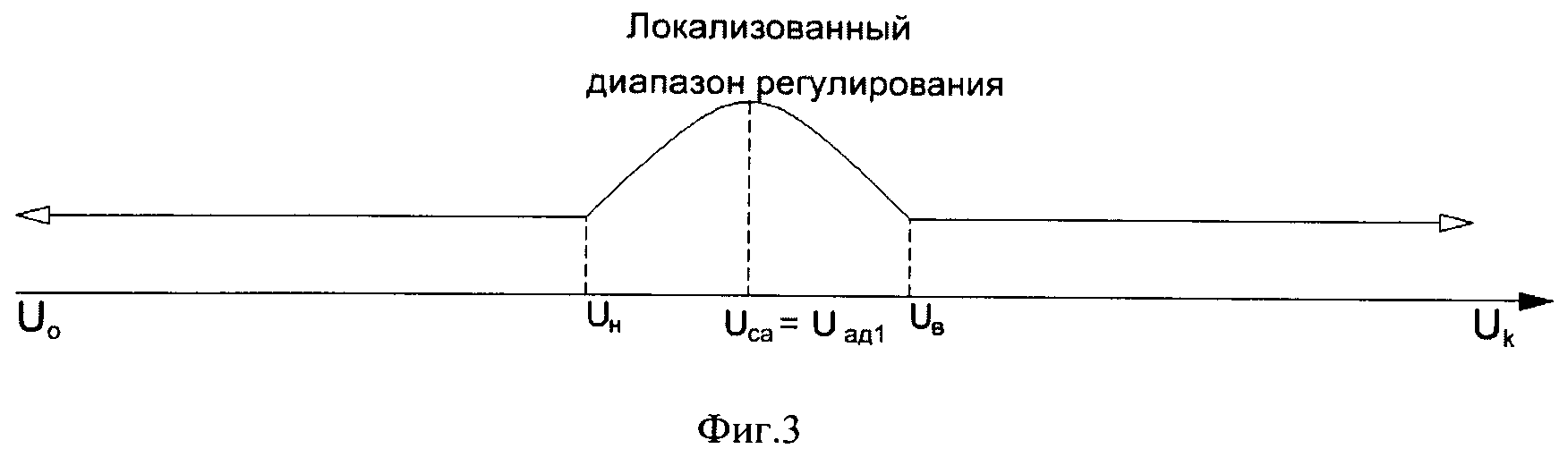
Иначе, как показано на фиг.2, параметр управления Uад1 меняется непрерывно от Uo до Uk и пропорционально изменению состояния объекта В от Во до Bk. Параметр Uад1 определяет Uca - значение задаваемой средней позиции для способа адаптивного трехпозиционного регулирования при адаптации на втором уровне. Одновременно по нему локализуется диапазон регулирования путем задания значений Uн - нижней крайней позиции и Uв - верхней крайней позиции второго уровня адаптации. Выбор Uн и Uв производится так, чтобы в локальном диапазоне регулирования было не менее 3-х и не более 5-ти значений позиций, включая Uca=Uад1 как среднее значение, при выборе 3-х и 5-ти позиций. При выборе 3-х значений в локальном диапазоне регулирования реализуется традиционное трехпозиционное регулирование, а при выборе 4-х и 5-ти значений - адаптивное трехпозиционное регулирование. Схематично локализация диапазона регулирования показана на фиг.3.
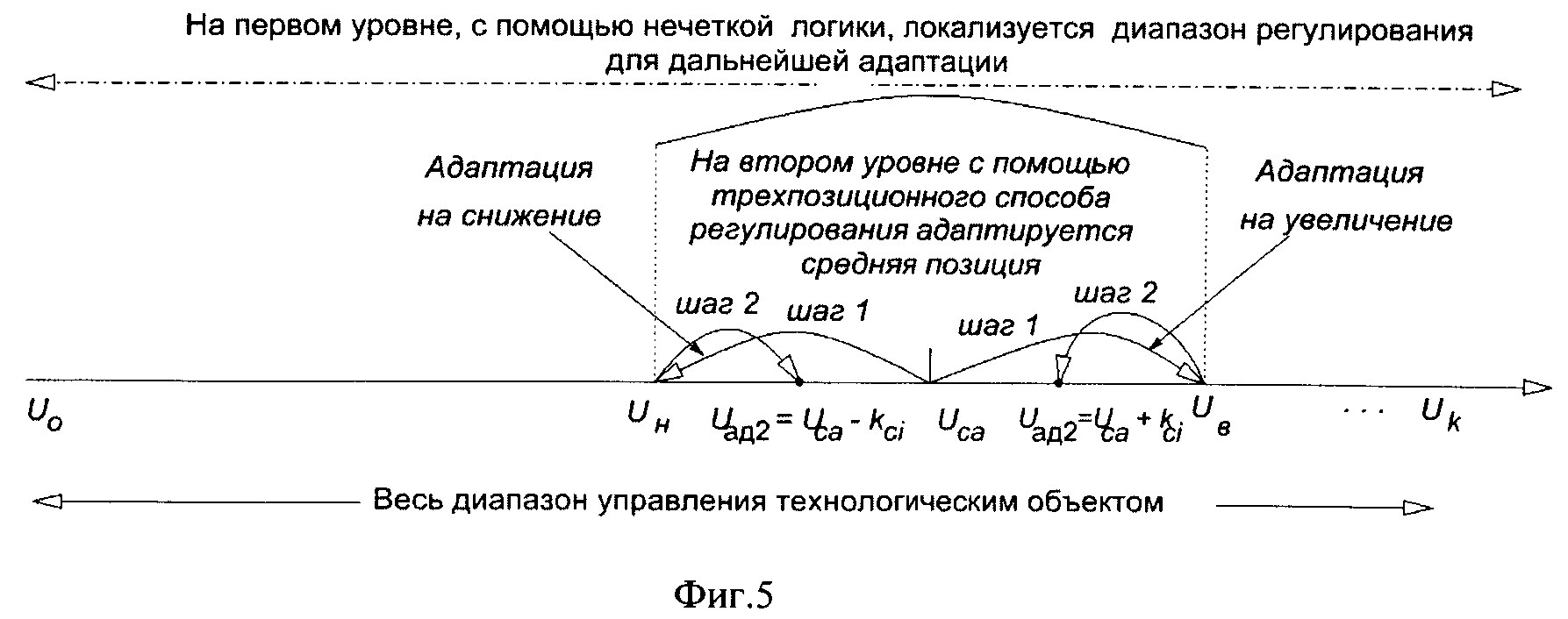
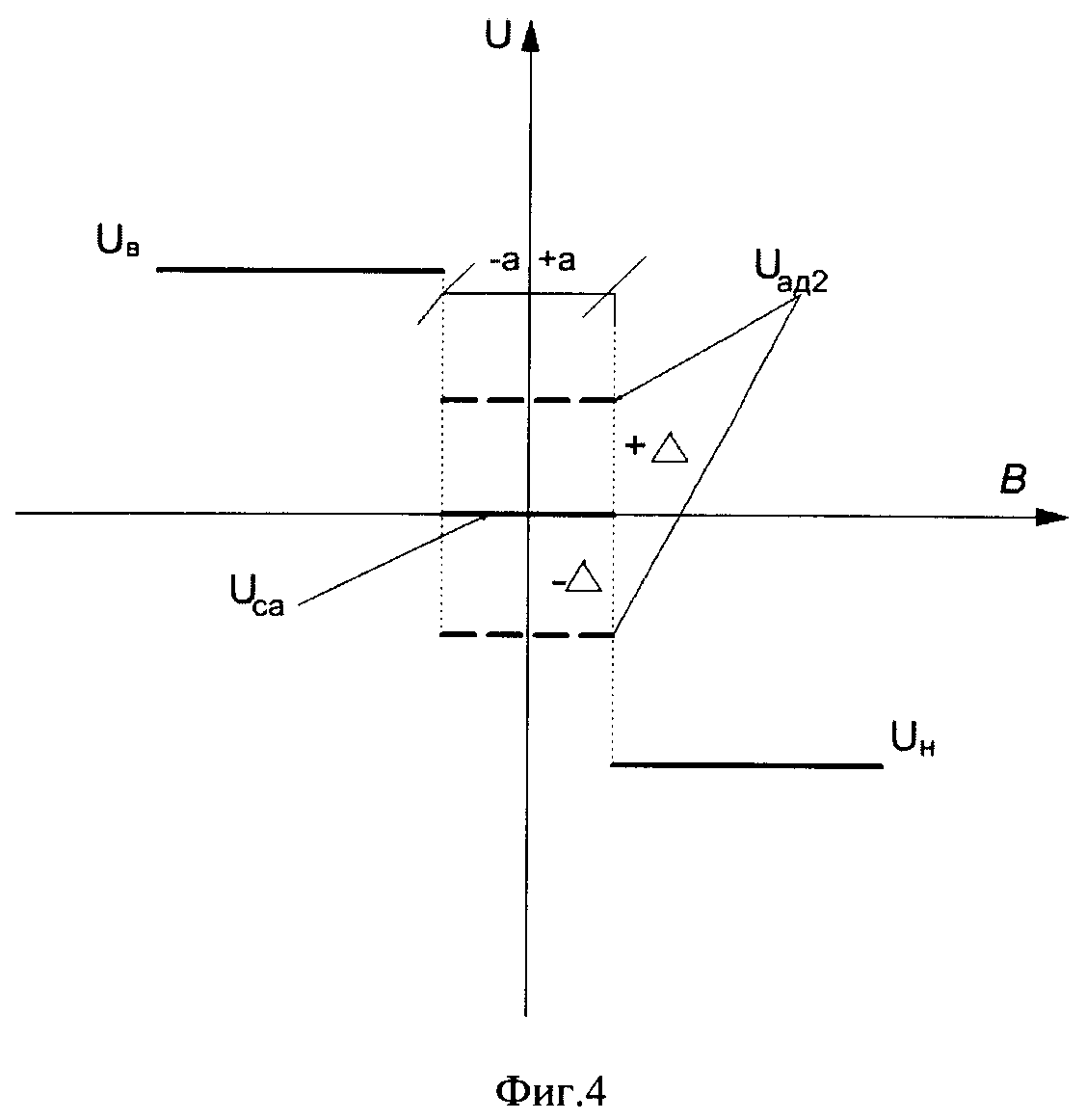
На втором уровне в управлении используется адаптивный трехпозиционный способ регулирования адаптивной средней позицией к одной из крайних Uн или Uв (фиг.4, где U - адаптируемое управление; Uн, Uв - границы значений управления в локализованном диапазоне регулирования (Uв - верхняя, Uн - нижняя); Uca - исходное (заданное) значение средней позиции (Uса=Uад1); Uад2=Uca±kci - адаптированная средняя позиция; kci - задаваемый коэффициент адаптации средней позиции; kci=kci-1±Δ; Δ - шаг изменения (адаптации) средней позиции; В - состояние объекта; ±а - границы зоны нечувствительности). Так как в локализованном на первом уровне диапазоне регулирования находится определенное количество положений дискретного исполнительного устройства Uн÷Uв, а исходным положением для управления на втором уровне является положение Uca, то при необходимости увеличения регулируемой технологической величины управляющее воздействие выбирается в интервале Uca÷Uв (Uад2=Uca+kci), а при необходимости уменьшения управляющее воздействие в интервале Uca÷Uн (Uад2=Uca-kci).
Схематично работа нечеткого адаптивного позиционного способа управления второго уровня изображена на фиг.5.
Рассмотрим работу способа на примере, заимствованном из способа-прототипа, для управления уровнем в ливневом колодце при наличии пяти функций принадлежностей (далее ФП) для пропускных способностей насосов, пяти ФП для интенсивности осадков, пяти ФП для уровня воды в колодце и пяти ФП для тенденций изменения уровня воды в колодце.
При обычном нечетком выводе для такого примера число правил составит 54=625. Число правил управления для предложенного в прототипе нечеткого адаптивного управления составит 25+25=50, а при предлагаемом нами способе адаптации на двух уровнях: 25+5=30, где 25 - число правил на первом уровне, а 5 - на втором (Uн, Uca-kci, Uca, Uca+kci, Uв).
Уменьшение числа правил упрощает реализацию управления, повышает оперативность и надежность функционирования, а уровень воды в ливневом колодце будет изменяться более плавно.
Если в прототипе задать не одинаковую производительность насосов, а различную, например с соотношениями 1, 2, 4, 8, 16 (как это предлагается в статье В.З. Магергут, Н.В. Маслова, В.В. Войтенко. Расчет соотношений пропускных способностей параллельно включенных исполнительных устройств для адаптивных и нечетких позиционных систем управления // Промышленные АСУ и контроллеры, №4, 2000. С.55-58), то возможно получить не 5 управляющих параметров, а 25=32, что еще более улучшит регулирование уровня воды в колодце.
Гидроизоляционная полимербитумная эмульсионная мастика
Колонна для жидкостной экстракции
Барботажный экстрактор
Пресс-валковый агрегат
Способ направленного инерционного вибровозбуждения и дебалансный вибровозбудитель направленного действия для его осуществления
Многоступенчатый барботажный экстрактор
Дезинтегратор
Способ демеркуризации люминесцентных ламп
Устройство и способ автоматического подавления вибрации помольно-смесительного агрегата
Генератор хаотических колебаний
Гидроизоляционная полимербитумная эмульсионная мастика
Колонна для жидкостной экстракции
Барботажный экстрактор
Пресс-валковый агрегат
Способ направленного инерционного вибровозбуждения и дебалансный вибровозбудитель направленного действия для его осуществления
Многоступенчатый барботажный экстрактор
Дезинтегратор
Способ демеркуризации люминесцентных ламп
Устройство и способ автоматического подавления вибрации помольно-смесительного агрегата
Генератор хаотических колебаний

