Результат интеллектуальной деятельности: НЕЙРОСЕТЕВАЯ АДАПТИВНАЯ СИСТЕМА РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ АКУСТИЧЕСКИМ ИЗЛУЧЕНИЯМ
Вид РИД
Изобретение
Изобретение относится к системам обнаружения и распознавания методами ближней локации.
Известно устройство для обнаружения объектов, содержащее приемный блок, блок принятия решений, блок измерения и блок согласования (см., например, Сборник научных трудов кафедры «Автономные информационные и управляющие системы» МГТУ им. Н.Э.Баумана и ФГУП «Центральный научно-исследовательский радиотехнический институт им. академика А.И.Берга» М., 2011 г., том.1, стр.38-40).
Алгоритм работы устройства позволяет выделить информативные параметры - локальные экстремумы спектральной плотности мощности акустического шума объекта, по которым судят о наличии его или отсутствии.
Наиболее близким по технической сущности устройством является нейросетевая адаптивная система распознавания объектов по их акустическим излучениям, содержащая приемник акустического излучения, блок предварительной обработки, включающий предварительный усилитель, и аналого-цифровой преобразователь (АЦП), блок выделения информативных признаков (БВИП), блок адаптации, блок распознавания типа цели (БРТЦ) (см. Сборник научных трудов кафедры «Автономные информационные и управляющие системы» МГТУ им. Н.Э. Баумана и ФГУП «Центральный научно-исследовательский радиотехнический институт им. академика А.И.Берга» М., 2011 г., том.1, стр.193-196).
БВИП содержит 16 идентичных каналов, образованных последовательно соединенными полосовым фильтром, детектором и цифровым интегратором. В блок также входит блок нормировки (БН) и модуль перестройки параметров фильтров (МППФ). Входным сигналом блока является сигнал с одного из микрофонов, прошедший предварительную обработку с помощью усилителя и АЦП.
БВИП работает по принципу спектрального анализатора параллельного действия. Оценка отсчетов спектральной плотности мощности (СПМ) проводится по выборке длиной N=4096 отсчетов. Величина полосы пропускания фильтров равна удвоенному разрешению анализируемых оценок СПМ и составляет 40 Гц, т.е. полосе пропускания будет соответствовать один отсчет оценки СПМ. Настройкой фильтров на отсчет СПМ, соответствующий локальному экстремуму, управляет МППФ. МППФ может быть выполнен, например, в виде модуля памяти, хранящего коэффициенты фильтров. Адрес ячеек с коэффициентами, соответствующими текущей центральной частоте, формируется по оценке p0, поступающей от блока адаптации.
Блок адаптации содержит управляемое устройство задержки, вычислители коэффициентов корреляции, устройство возведения в квадрат, делитель, умножитель, сумматор и устройство задержки. Входные сигналы блока адаптации - выходные сигналы широкополосной фазоразностной цепи, преобразованные в цифровую форму с помощью АЦП.
Блок адаптации выполняет вычисление оценки коэффициента регрессии для текущей выборки длиной N=4096 отсчетов и осуществляет расчет рассогласования и подстройку параметра p0.
Вычисление начального значения p0 и крутизны дискриминационной характеристики S проводится при захвате цели. При этом для всех p из рабочего диапазона вычисляются значения β1(p, p0) и значения β2(p, p0). По положению глобального максимума β1(p, p0) определяется начальное значение p0 , затем по β2(p, p0) в окрестности p0 вычисляется крутизна дискриминационной характеристики. Описанный этап требует наибольшей производительности от цифровой системы обработки и является определяющим при выборе тактовой частоты, которая в итоге должна составлять минимум 60 МГц.
Блок распознавания типа цели представляет собой двухслойную нейронную сеть (НС). Первый слой содержит шестнадцать распределительных элементов, соединенных последовательно непосредственно со всеми пятью нейронами, которые соединены с распределительными элементами второго слоя - пять распределительных элементов и три нейрона. Блок на выходе нейронов второго слоя содержит логические элементы И, которые формируют результат распознавания на выходе БРТЦ только при наличии цели в луче пеленгатора, т.е. при наличии сигнала «цель в луче», поступающего от канала обнаружения. Тем самым уменьшается вероятность ложных тревог БРТЦ. Входными сигналами блока являются элементы вектора информативных признаков, вычисленные в БВИП.
Недостатками прототипа является то, что
- прототип требует аналого-цифрового преобразования на входе, что увеличивает время обработки сигнала, которое в условиях боевого применения способа обнаружения объекта является важным фактором;
- адаптация производится путем подстройки фильтра к экстремумам спектральной плотности сигнала, характерного для спектральной плотности сигнала вертолета. Данный признак применим только в частном случае для вертолета и не является информативным для рассматриваемых классов целей. В классификаторе объектов военной техники по их акустическим излучениям осуществляется временная обработка сигналов, что также затягивает процесс классификации.
Технической задачей, решаемой в изобретении, является расширение класса классифицируемых объектов военной техники по их акустическим излучениям с применением адаптации алгоритма обработки сигнала к скоростям движения аэродинамических и наземных объектов.
Для реализации поставленной задачи в нейросетевую адаптивную систему распознавания объектов по их акустическим излучениям, состоящую из приемного блока, включающего приемник и блок предварительной обработки, содержащий предварительный усилитель, блока выделения информативных признаков, блока адаптации, блока распознавания типа цели, выполненного в виде нейросетевого тракта обработки, введены блок энергетического канала, ключ и блок индикации, при этом блок предварительной обработки дополнен последовательно соединенными предварительным фильтром, усилителем с автоматической регулировкой усиления (АРУ) и полосовым фильтром, охваченным с АРУ обратной связью, при этом усилитель с АРУ через полосовой фильтр соединен со входом блока выделения информативных признаков, содержащим последовательно включенные компаратор, счетчик длительностей интервалов и блок накопителей, блок энергетического канала выполнен из усилителя энергетического канала, связанного через последовательно соединенные детектор, инерционное звено, компаратор энергетического канала, являющийся выходом блока энергетического канала, связанный с управляющим входом ключа, при этом блок распознавания цели дополнен блоком обнаружения классифицируемых целей и устройством выбора максимума, при этом нейросетевой тракт обработки выполнен в виде нейросетевого классификатора из трехслойной нейронной сети, первый слой которого состоит из 32 входных нейронов, второй слой - промежуточный - из 4 нейронов, а третий - выходной слой содержит количество нейронов, равных количеству классифицируемых объектов, выходы нейросетевого классификатора через блок обнаружения классифицируемых целей и устройства выбора максимума подключены к входам ключа, выход последнего соединен с блоком индикации.
Как известно, осуществить адаптацию нейросети (НС) к скорости движения объектов можно на основании оценочных характеристик спектров входных реализаций акустических сигналов. При изменении скорости движения объектов, например самолета, вертолета, бронетанковой техники и т.д., происходит изменение частоты вращения турбины, винтов, коленчатого вала. Результирующий сигнал можно рассматривать как сигнал с изменяющимся масштабом времени в α раз.
Из теоретической радиотехники известно, что при изменении масштаба времени сигнала в α раз спектр сигнала изменяется в  раз, (где α - коэффициент изменения масштаба времени), т.е.
раз, (где α - коэффициент изменения масштаба времени), т.е.
 , где S(ω) - спектр сигнала с α=1, ω - частота сигнала.
, где S(ω) - спектр сигнала с α=1, ω - частота сигнала.
В прототипе показано, что при проверке гипотезы о нормальном распределении выборочных значений акустических сигналов от рассматриваемых объектов с помощью χ2-критерия (критерий проверки гипотезы о законе распределения) последняя может быть принята при уровне значимости 10%. За время принятия решения в НС, в рассматриваемой системе около 1 секунды, входные реализации акустических сигналов можно рассматривать как стационарные.
Для стационарного нормального случайного процесса среднее число пересечений уровня x=x0 (значение уровня) с заданным знаком производной равно
 ,
,
где: λ1 - среднее число пересечений уровня,
σ2 - дисперсия случайного процесса; ω1 определяется уравнением

 - отношение средних мощностей производной ξ'(t) и процесса ξ(t),
- отношение средних мощностей производной ξ'(t) и процесса ξ(t),
Sξ(ω) - спектральная плотность случайного процесса.
Среднее число пересечений нулевого уровня х0=0 в единицу времени с заданным знаком производной на основании (2) равно
 .
.
При изменении масштаба времени в а раз на основании (1) и (3) средняя частота пересечения нулевого уровня λ1a(0) будет
Т.е. при изменении масштаба времени в а раз средняя частота пересечения нулевого уровня λ1a(0) также изменяется в α раз. Тогда при оценке вектора распределения длительностей интервалов между нулями и получении инвариантных к частоте характеристик необходимо тактовую частоту FT при измерении длительностей интервалов между нулями изменять в соответствии с α, т.е.
FTα=FTα
Оценку средней частоты λ1a(0) при адаптации возможно осуществить путем измерения длительности интервала времени T, соответствующего n интервалам между нулями реализации сигнала, т.е.
 .
.
представим относительную погрешность оценки среднего интервала T в виде
 ,
,
где  - математическое ожидание n интервалов между нулями;
- математическое ожидание n интервалов между нулями;  ;
;  - относительная погрешность оценки среднего интервала T.
- относительная погрешность оценки среднего интервала T.
Дисперсию n интервалов между нулями получим в виде

где M - оператор для вычисления математического ожидания,
Bφ(τ) - корреляционная функция случайной фазы процесса {ξ(t)}.
τ - интервал времени между нулями,
тогда с учетом (6) и (7) дисперсия относительной погрешности
где D - оператор вычисления дисперсии относительной погрешности.
Для малых значений погрешность оценки средней частоты  на основании (5) можно представить как
на основании (5) можно представить как  , тогда дисперсия оценки средней частоты энергетического спектра с относительной полосой α узкополосного случайного процесса запишется
, тогда дисперсия оценки средней частоты энергетического спектра с относительной полосой α узкополосного случайного процесса запишется
 .
.
При достаточно больших n величиной Bφ(nπ/ω0) в выражении (8) для сигналов с относительной полосой энергетического спектра α>0,1-0,2, по сравнению с Bφ(0)=3,28, можно пренебречь.
Поэтому дисперсию относительной погрешности оценки средней частоты энергетического спектра можно представить в виде

тогда среднеквадратическое отклонение относительной погрешности
 .
.
Следовательно, для случайных процессов с α>0,1-0,2 относительная погрешность оценки средней частоты не зависит от относительной полосы частот при обработке n>10 периодов средней частоты реализации процесса.
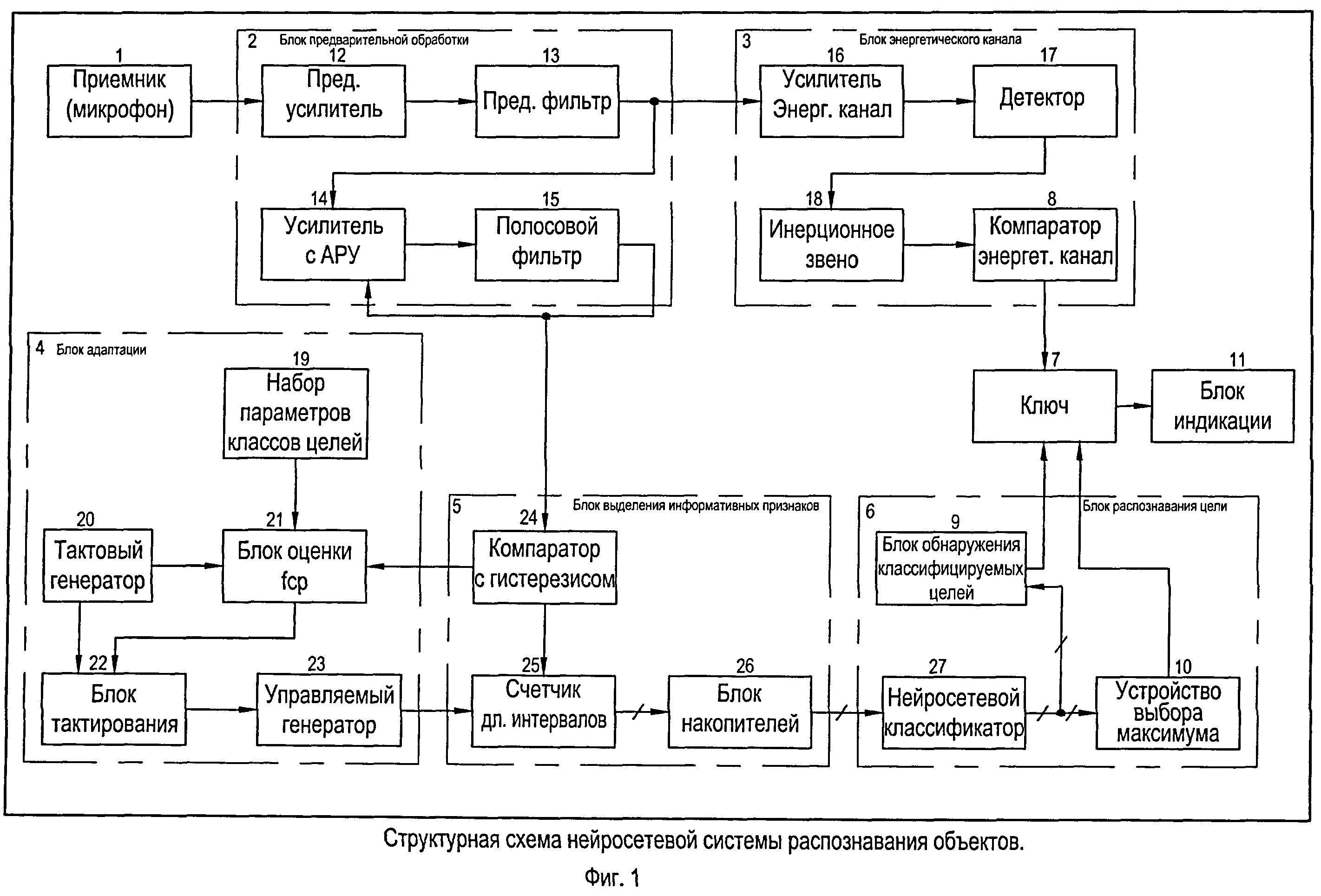
Изобретение поясняется чертежом, где на фиг.1 показана нейросетевая адаптивная система распознавания объектов по их акустическим излучениям, а на фиг.2 - структурная схема нейронной сети.
Устройство содержит приемник 1, блок 2 предварительной обработки, блок энергетического канала 3, блок адаптации 4, блок 5 выделения информативных признаков, блок 6 распознавания цели, а также последовательно включенные ключ 7, входы которого соединены с компаратором 8 энергетического канала блока 3 энергетического канала, блоком 9 обнаружения классифицируемых целей и устройством 10 выбора максимума блока 6 распознавания цели, и блок индикации 11.
Блок 2 предварительной обработки содержит последовательно соединенные предварительный усилитель 12, вход которого соединен с приемником 1, предварительный фильтр 13, усилитель с АРУ 14 и полосовой фильтр 15, выход которого соединен с усилителем с АРУ 14.
Блок энергетического канала 3 содержит последовательно включенные усилитель энергетического канала 16, вход которого соединен с предварительным фильтром 13 блока 2 предварительной обработки, детектор 17, инерционное звено 18 для оценки уровня энергии входного сигнала (в качестве которого можно использовать реальное интегрирующее звено, RC-звено) и компаратор 8 энергетического канала.
Блок адаптации 4 содержит набор параметров классов целей 19, тактовый генератор 20, блок 21 оценки средней частоты флуктуации в реализации входного сигнала и последовательно включенные блок тактирования 22 и управляемый генератор 23. Входы блока 21 оценки средней частоты флуктуации в реализации входного сигнала соединены с набором параметров классов целей 19, тактовым генератором 20 и компаратором 24 с гистерезисом блока выделения информативных признаков 5. Входы блока тактирования 22 соединены с тактовым генератором 20 и блоком 21 оценки средней частоты флуктуации в реализации входного сигнала.
Блок 5 выделения информативных признаков состоит из последовательно включенных компаратора 24 с гистерезисом, вход которого соединен с полосовым фильтром 15 блока 2 предварительной обработки, счетчика 25 длительностей интервалов, вход которого соединен с управляемым генератором 23 блока адаптации 4 и блока накопителей 26.
Блок 6 распознавания цели состоит из блока 9 обнаружения классифицируемых целей, вход которого соединен с нейросетевым классификатором 27, и последовательно включенных нейросетевого классификатора 27, вход которого соединен с блоком накопителей 26 блока 5 выделения информативных признаков, и устройства выбора максимума 10. Связь между элементами 25 и 26 счетчиком длительностей интервалов 25 и блоком накопителей 26, а также между блоком накопителей 26 и нейросетевым классификатором 27 выполнена в виде 32-канальной шины. Связь между нейросетевым классификатором 27, блоком обнаружения классифицируемых целей 9 и устройством выбора максимума 10 выполнена в виде 3-канальной шины.
Устройство работает следующим образом. Акустический сигнал движущегося объекта преобразуется в электрический сигнал при помощи широкополосного приемника 1 (микрофона, частотный диапазон 50 Гц - 12 кГц), амплитуда выходного сигнала микрофона не выходит за рамки микровольтового диапазона. Выходной сигнал приемника поступает на предварительный усилитель 12 блока 2 предварительной обработки с коэффициентом усиления 5-10.
Далее сигнал с выхода предварительного усилителя 12 подается на вход предварительного фильтра 13 блока 2 предварительной обработки. Задача предварительной фильтрации во входном тракте изделия сводится к удалению из входного сигнала постоянной и высокочастотной составляющих.
В классификаторе объектов военной техники по их акустическим излучениям предусмотрен блок обнаружения входного сигнала с минимальным уровнем - блок энергетического канала 3.
Выходной сигнал предварительного фильтра 13 блока 2 предварительной обработки поступает на вход усилителя энергетического канала 16 блока энергетического канала 3. Коэффициент усиления звена фиксирован и составляет 100.
Сигнал с выхода усилителя энергетического канала 16 подается на вход инерционного детектора, состоящего из детектора 17 и инерционного звена 18 блока энергетического канала 3. В качестве алгоритма работы детектирующего звена выбрано нелинейное преобразование вида:
 ,
,
где:  - выходной сигнал детектора, Uin - входной сигнал.
- выходной сигнал детектора, Uin - входной сигнал.
Выходной сигнал инерционного звена 18 блока энергетического канала 3 поступает на вход компаратора 8 энергетического канала блока энергетического канала 3. Звено компаратора формирует дискретный управляющий сигнал согласно выражению:
 ,
,
где: Uout - выходной сигнал детектора, U1 - уровень логической единицы, U0 - уровень логического нуля, Uin - входной сигнал, Up - пороговый уровень компаратора, определяемый исходя из условий обнаружения сигнала с минимальной энергией, в рассматриваемом случае составляющий 0,25 напряжения питания. Задачей компаратора 8 является формирование разрешающего сигнала энергетического канала.
Выходной сигнал предварительного фильтра 13 блока 2 предварительной обработки поступает на вход усилителя с задержанным по уровню АРУ 14 блока 2 предварительной обработки. Динамический диапазон АРУ составляет 90 дБ, время срабатывания - 100 дБ/с. Задачей усилителя с АРУ является обеспечение необходимого для дальнейшей работы изделия коэффициента усиления, при этом не допустить нелинейных искажений, возникающих при ограничении сигнала, так как динамика входного сигнала может достигать 82-89 дБ. Управляющим сигналом усилителя с АРУ 14 является выходной сигнал полосового фильтра 15 блока 2 предварительной обработки.
Далее сигнал с выхода усилителя с задержанным по уровню АРУ 14 поступает на вход полосового фильтра 15 блока 2 предварительной обработки. Полосовой фильтр состоит из последовательно включенных фильтра высокой частоты (ФВЧ) с частотой среза 250-300 Гц и крутизной характеристики 40-60 дБ/дек. и фильтра низкой частоты (ФНЧ) с частотой среза 2кГц и крутизной характеристики 20 дБ/дек. Параметры ФВЧ и ФНЧ были выбраны исходя из анализа записей акустических сигналов типовых целей, полученных при натурных испытаниях (многократные проезды гусеничной и колесной техники, пролеты аэродинамических объектов). Задача полосовой фильтрации - ликвидация низкочастотных составляющих шумов ветра и высокочастотных шумовых составляющих.
Сигнал с выхода полосового фильтра 15 блока 2 предварительной обработки подается на вход компаратора 24 с гистерезисом блока выделения информативных признаков 5. Задачей компаратора является дискретное преобразование входного сигнала с сохранением информативного признака - интервалов между нулями в реализации входного сигнала согласно выражению:
где: Uout - выходной сигнал компаратора, Ul - уровень логической единицы, U0 - уровень логического нуля, Uin - входной сигнал, Ug - величина гистерезиса компаратора. Предполагается возможность варьирования величины гистерезиса звена в диапазоне 0,01-0,1 напряжения питания.
Выходной сигнал компаратора 24 блока выделения информативных признаков 5 поступает на вход блока 21 оценки средней частоты флуктуации в реализации входного сигнала блока адаптации 4. Адаптация осуществляется по n=100 периодам реализации входного сигнала перестройкой частоты генератора в зависимости от средней частоты флуктуации в реализации входного сигнала. Известны средние частоты флуктуации во входных реализациях для каждого типа цели при движении с максимальными скоростями fi_max. Частота управляемого генератора 23 блока адаптации 4 изменяется в соответствии с соотношением fri=f0·fc/fi_max, где f0=8кГц, fc - средняя частота флуктуации в реализации входного сигнала. Таким образом осуществляется инвариантность вектора входной реализации нейросетевого классификатора 27 блока 6 распознавания цели, формирование которого рассмотрено далее. Для каждого типа цели вводится коэффициент масштабирования по времени ki= fi_max/fc. При максимальной скорости движения объекта военной техники средняя частота флуктуации в реализации входного сигнала заведомо известна и будет составлять для каждого типа цели: самолет - flmax, вертолет - f2max, гусеничная и колесная техника - f3max. Для каждого класса объекта вычисляется количество периодов тактового генератора 20 блока адаптации 4, отсчитываемых за время адаптации алгоритма, соответствующее n=100 периодам реализации входного сигнала согласно выражениям: Ni_max=(n·8кГц)/fl_max, где fi_max - средние частоты флуктуации в реализации входного сигнала для каждого типа цели при максимальной скорости движения объекта военной техники. Значения количества периодов тактового генератора, отсчитываемых за время адаптации алгоритма, соответствующего максимальным скоростям движения объектов военной техники Ni_max, хранятся в наборе параметров классов целей 19 блока адаптации 4. Оценка средней частоты флуктуации в реализации входного сигнала производится за время, необходимое для адаптации алгоритма к скорости движения цели, составляет n=100 периодов реализации входного сигнала, при этом за это время производится отсчет N периодов тактового генератора 20 блока адаптации 4 (8кГц). Коэффициенты масштабирования по времени вычисляются для каждого класса объектов на основании выражения:
ki=fi_max/fc=Ni_max/N,
где fc - средняя частота флуктуации в реализации входного сигнала, N - количество периодов тактового генератора 20, отсчитанных за время адаптации алгоритма. При движении объектов с максимальными скоростями адаптация алгоритма не производится. Для движения объектов со скоростями, меньшими максимальной, частота флуктуации в реализации входного сигнала также будет меньше максимальной, вследствие чего коэффициенты масштабирования по времени ki будут увеличиваться, при этом будет производиться адаптация алгоритма к текущей скорости движения цели. Выходным сигналом блока 21 оценки средней частоты флуктуации в реализации входного сигнала блока адаптации 4 является вектор коэффициентов масштабирования по времени ki, количество элементов вектора ki соответствует количеству классов целей, в рассматриваемом случае трем.
Сигнал с выхода блока 21 оценки средней частоты флуктуации в реализации входного сигнала поступает на вход блока тактирования 22 блока адаптации 4. В изделии применяется последовательная обработка входных реализаций на заданных тактовых интервалах, определяемых блоком тактирования с периодом T=0,5 с. В блоке производится последовательное варьирование коэффициента ki в соответствии с номером класса цели.
Выходной сигнал блока тактирования 22 поступает на вход управляемого генератора 23 блока адаптации 4, частота которого может варьироваться в зависимости от коэффициентов масштабирования по времени ki согласно выражению: fi=f0/ki, где i - номер класса целей, f0=8кГц - максимальная частота управляемого генератора.
Сигнал с выхода компаратора 24 блока 5 выделения информативных признаков поступает на вход счетчика 25 длительностей интервалов между нулями блока 5 выделения информативных признаков. В качестве тактового сигнала используется выходной сигнал управляемого генератора 23 блока адаптации 4. Разрядность счетчика - 32. Каждому разряду счетчика ставится в соответствие величина интервала между нулями входного сигнала от (1/fi=ki/f0) с, соответствующего 1-му отсчету, до (32/fi=32ki/f0) с, соответствующего 32-му отсчету, с шагом (1/fi=ki/f0) с. Таким образом на выходах счетчика последовательно формируются оценки текущих значений длительностей интервалов между нулями входного сигнала для каждого класса цели i.
Выходные сигналы счетчика 25 длительности интервалов поступают на входы блока накопителей 26 блока 5 выделения информативных признаков, представляющий из себя набор из 32 интегрирующих звеньев первого порядка с величиной времени накопления 0,1-0,5 с. На выходах блока накопителей 26 формируется распределение длительностей интервалов между нулями входного акустического сигнала за время наблюдения, соответствующее времени накопления звена.
Сигналы с выходов блока накопителей 26 блока 5 выделения информативных признаков поступают на входы нейросетевого классификатора 27 блока 6 распознавания цели. В данном блоке производится обработка входного вектора распределений длительности интервалов между нулями. Значение весовых коэффициентов определяются в результате обучения нейронной сети по адаптированным, как показано выше, векторам реализаций входных сигналов реальных объектов военной техники для каждого класса целей. Для решения задачи классификации объектов военной техники по их акустическим излучениям выбрана нейронная сеть с количеством слоев, равным 3, структурная схема которой показана на фиг.2. Первый слой сети состоит из 32 входных нейронов 28.1-28.32, промежуточный слой содержит в себе 4 нейрона 29.1-29.4. Выходной слой нейронной сети должен состоять из нейронов по количеству распознаваемых классов объектов, в рассматриваемом случае количество выходных нейронов равно трем 30.1-30.3. На каждом k-ом выходе второго слоя нейронной сети отклик на входной вектор X, размерностью 32 может быть представлен в виде:
 ,
,
где f1 и f2 - функции активации нейронов соответственно первого и второго слоев;  - весовые коэффициенты первого слоя;
- весовые коэффициенты первого слоя;  - весовые коэффициенты второго слоя;
- весовые коэффициенты второго слоя;  , и
, и  - нулевые веса соответственно нейронов первого и второго слоев.
- нулевые веса соответственно нейронов первого и второго слоев.
Для решения задачи была применена пороговая активационная функция:
На выходе нейросетевого классификатора 27 блока 6 распознавания цели формируются выходные сигналы, согласно количеству типов целей, в рассматриваемом случае трем, где мерой принадлежности принимаемого сигнала к типу цели является уровень сигнала. Таким образом формируется набор выходных сигналов нейросетевого классификатора 27, поступающий на входы устройства 10 выбора максимума блока 6 распознавания цели, анализирующее уровни входных сигналов, и ставящее в соответствие максимальному из них тип цели. Выходные сигналы нейросетевого классификатора 27 также поступают на входы блока 9 обнаружения классифицируемых целей блока 6 распознавания цели, в котором производится весовое суммирование входных сигналов и последующее сравнение результата с порогом. Значения весовых коэффициентов в рассматриваемом случае выбираются равными 0,3, так как принадлежность входного сигнала к заданным классам считается равновероятной. Величина порогового значения выбирается по результатам обучения нейронной сети. На выходе блока обнаружения классифицируемых целей формируется управляющий сигнал.
Сигнал с выхода устройства 10 выбора максимума блока 6 распознавания цели поступает на вход ключа 7, управляемого энергетическим каналом 3 и блоком 9 обнаружения блока 6 распознавания цели. Управление ключом 7 производится при помощи выходных сигналов компаратора 8 энергетического канала и блока 9 обнаружения с выхода схемы логического "И".
Сигнал с выхода ключа 7 поступает на вход блока индикации 11. Задачей блока индикации является выдача номера типа цели.
Таким образом, используя в качестве информативного признака в виде длительности интервалов между нулями и обеспечивая тем самым инвариантность к уровню сигнала на входе, можно применить адаптацию к скоростям движения целей, позволяющую изменить масштаб времени спектра входного сигнала, что ускоряет процесс распознавания, а также расширяет круг распознаваемых объектов.
Нейросетевая адаптивная система распознавания объектов по их акустическим излучениям, состоящая из приемного блока, включающего приемник и блок предварительной обработки, содержащий предварительный усилитель, блока выделения информативных признаков, блока адаптации, блока распознавания типа цели, выполненного в виде нейросетевого тракта обработки, отличающаяся тем, что в нее введены блок энергетического канала, ключ и блок индикации, при этом блок предварительной обработки дополнен последовательно соединенными предварительным фильтром, усилителем с автоматической регулировкой усиления и полосовым фильтром, охваченным с усилителем с автоматической регулировкой усиления обратной связью, при этом усилитель с автоматической регулировкой усиления через полосовой фильтр соединен со входом блока выделения информативных признаков, содержащего последовательно включенные компаратор, счетчик длительностей интервалов и блок накопителей, блок энергетического канала выполнен из усилителя энергетического канала, связанного через последовательно соединенные детектор, инерционное звено, компаратор энергетического канала, являющийся выходом блока энергетического канала, который соединен с управляющим входом ключа, а блок распознавания цели дополнен блоком обнаружения классифицируемых целей и устройством выбора максимума, при этом нейросетевой тракт обработки выполнен в виде нейросетевого классификатора из трехслойной нейронной сети, первый слой которого состоит из 32 входных нейронов, второй слой - промежуточный из 4 нейронов, а третий - выходной слой содержит количество нейронов, равных количеству классифицируемых объектов, выходы нейросетевого классификатора через блок обнаружения классифицируемых целей и устройства выбора максимума подключены к входам ключа, выход последнего соединен с блоком индикации.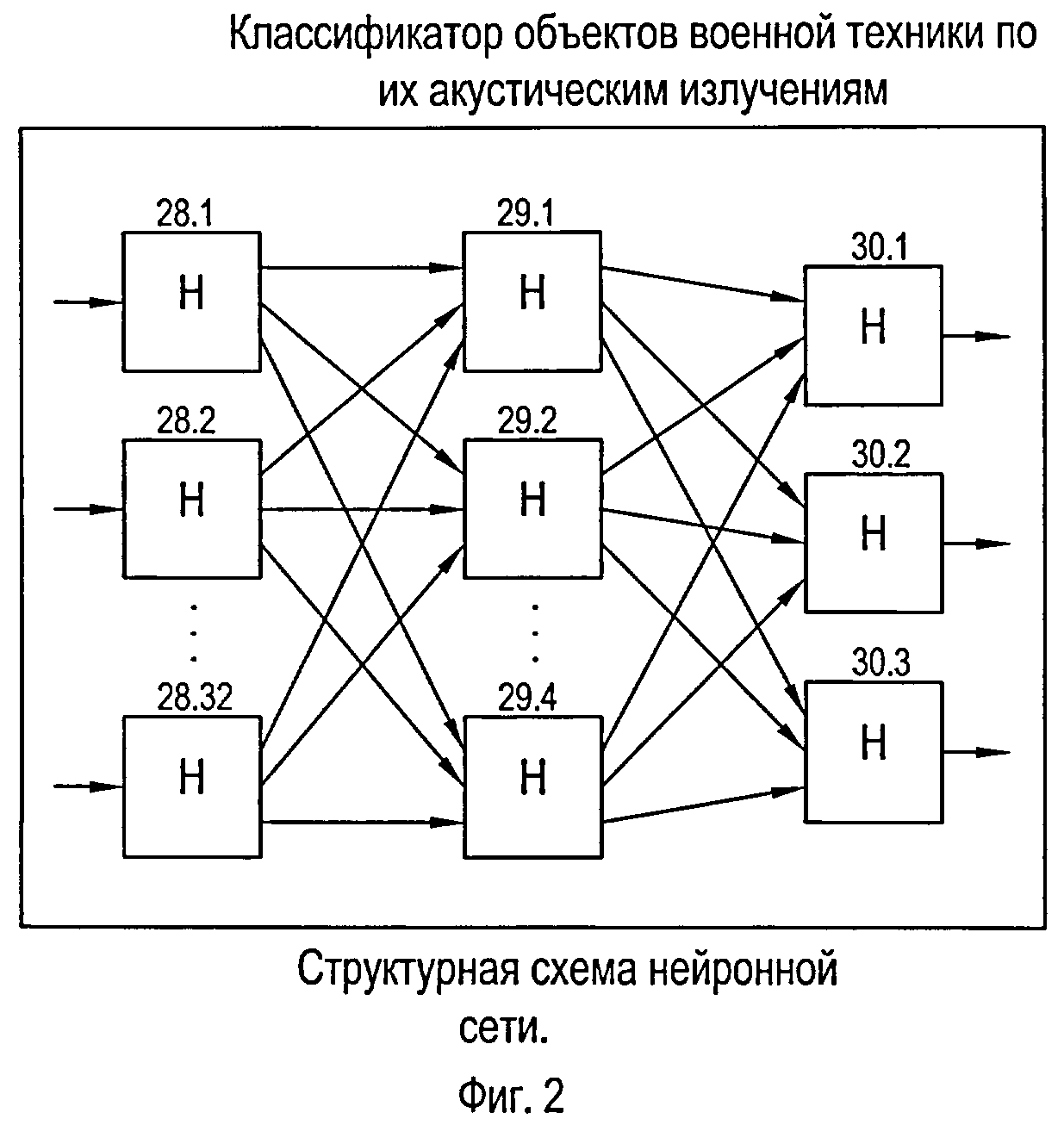
Трехмерное электронное устройство
Способ изготовления гибких рельефных печатных плат для электронной и электротехнической аппаратуры
Микроэлектромеханический ракетный двигатель
Способ изготовления свч трехмерного модуля
Способ управления возбуждением синхронного электрического генератора
Способ настройки параметров регулятора возбуждения синхронного электрического генератора
Радиолокационный фиксатор дальности с комбинированной частотной модуляцией и предельной регрессионной обработкой
Способ изготовления микроэлектромеханического ключа для защиты информационно-телекоммуникационной аппаратуры космических аппаратов при электромагнитном старте
Способ изготовления полупроводниковых приборов
Способ изготовления микроэлектромеханических структур и устройство для его осуществления
Трехмерное электронное устройство
Способ изготовления гибких рельефных печатных плат для электронной и электротехнической аппаратуры
Микроэлектромеханический ракетный двигатель
Способ изготовления свч трехмерного модуля
Способ управления возбуждением синхронного электрического генератора
Способ настройки параметров регулятора возбуждения синхронного электрического генератора
Радиолокационный фиксатор дальности с комбинированной частотной модуляцией и предельной регрессионной обработкой
Способ изготовления микроэлектромеханического ключа для защиты информационно-телекоммуникационной аппаратуры космических аппаратов при электромагнитном старте
Способ изготовления полупроводниковых приборов
Способ изготовления микроэлектромеханических структур и устройство для его осуществления

