Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕПЛОВЫМ СОСТОЯНИЕМ И ФУНКЦИОНАЛЬНЫМИ ПАРАМЕТРАМИ ТЕХНИЧЕСКИХ УСТРОЙСТВ
Вид РИД
Изобретение
Изобретение относится к космической, авиационной, радиотехнической, приборостроительной и машиностроительной областям и может быть использовано во всех областях народного хозяйства для автоматического управления тепловым состоянием и функциональными параметрами технических устройств, а также различных технических и технологических аппаратов, машин и их систем, управление работой которых осуществляется на основе информационных компьютерных систем числового управления.
Известна система терморегулирования космического аппарата (патент РФ №2151720, B64G 1/50, F28D 15/00, 2000 г.) содержащая замкнутый жидкостный тракт с теплоносителем, включающий в себя терморегулятор расхода теплоносителя с чувствительным элементом терморегулятора, перед которым дополнительно установлен калиброванный тройник со сменным калибратором расхода теплоносителя на одном из его выходов, причем первый выход калиброванного тройника соединен с входом чувствительного элемента, а второй выход его сообщен трубопроводом с жидкостным трактом между электронасосным агрегатом и выходом чувствительного элемента терморегулятора. С целью получения приемлемой частоты колебаний температуры теплоносителя в жидкостном тракте системы терморегулирования при использовании ее с различными ретрансляторами; инерционность чувствительного элемента или постоянная времени, характеризующая его инерционность количественно, определяется из решения дифференциального уравнения переходного процесса чувствительного элемента. Постоянной времени чувствительного элемента может быть изменена только изменением коэффициента теплоотдачи, который может быть изменен только изменением расхода теплоносителя, омывающего чувствительный элемент.
Недостатком данного изобретения является сложная конструктивная схема и невозможность учета случайных параметров и характеристик, определяющих работу чувствительного элемента.
Известна система терморегулирования космического аппарата (патент РФ №2196079, B64G 1/50, B64G 1/00, F28D 15/00, 2003 г.) с гидравлическими контурами и агрегатами для отбора, подвода и сброса тепла, в том числе в виде термоплат и излучательных внешних радиаторов, включенными в контур указанной системы терморегулирования, причем каждый моноблок снабжен расположенными параллельно на заданном расстоянии одна от другой тепловыми трубами, а концевые части тепловых труб, образующие зоны конденсации, объединены пластиной из теплопроводящего материала в отдельные термоплаты, при этом к каждой термоплате через теплопроводящий материал закреплена трубка с капиллярной структурой, выполняющей роль капиллярного насоса и образующей зону испарения контурной тепловой трубы, причем каждая группа термоплат соединена параллельно между собой и подключена к внешнему излучательному с помощью трубопроводов.
Недостатком данного изобретения также является сложная конструктивная схема и невозможность учета случайных параметров и характеристик, определяющих работу термоплат.
Известен теплообменный аппарат (патент РФ №2199068, F28D 15/00, 2003 г.), содержащий соединенные трубопроводом частично заполненный теплоносителем испаритель с патрубком для подвода газов, расположенный над ним конденсатор, регулируемый запорный орган в трубопроводе и патрубок в днище конденсатора, соединенный с атмосферой, внутри конденсатора перпендикулярно основанию по высоте расположены перегородки с каналами, на одной из наружных сторон конденсатора расположен щелевой конвектор, а также дополнительно содержит расположенную под испарителем камеру подогрева испарителя с патрубком для подвода горячих газов, испаритель состоит из двух камер, соединенных насосом, внутренний источник тепла, щелевой конвектор, образованный смежными поверхностями камер испарителя, второй регулируемый запорный орган и патрубок в крышке конденсатора.
Недостатком данного изобретения также является сложная конструктивная схема, невозможность учета случайных параметров и характеристик, определяющих работу испарителя, а также регулируемые запорные органы, снижающие надежность работы системы.
Известен способ охлаждения (патент РФ №2367857, F25D 21/02, F25B 3/00, 2009 г.) питьевой воды для автомата дозированного разлива напитков, включающий подачу воды в емкость дозированного объема, использование термоэлектрического эффекта элемента Пельтье для отведения тепла и охлаждения воды до температуры не ниже 0°C и не выше +4°C, а управляют процессом охлаждения воды путем регулирования мощности на элементе Пельтье и отвода тепла от него теплопоглощающим и теплорассеивающим элементами.
Недостатком данного изобретения также является невозможность учета случайных параметров и характеристик, определяющих работу теплопоглощающего и теплорассеивающего элементов, а также отсутствие управления термоэлектрическими параметрами элемента Пельтье.
Известен способ (А.С. №1041226, кл. B23B 25/06, 1983 г.) автоматической компенсации тепловых смещений шпинделя металлорежущего станка с числовым программным управлением, в котором компенсация тепловых смещений шпинделя осуществляется по типовым зависимостям по времени и частоте вращения шпинделя.
Недостатками всех упомянутых изобретений является то, что они не учитывают случайных характер параметров, определяющих величину температурных характеристик, изменение значений температуры окружающей среды, требуют сложной системы измерения и регулирования, реализуют управление только одним функциональным параметром, ограничены техническим и технологическим назначением объекта управления, не могут быть изменены параметры управления и их величины в процессе эксплуатации, не учитывают требуемую надежность управления.
Очевидно, что общими отличительными чертами известных технических и технологических устройств являются необходимость управления тепловым состоянием и функциональными параметрами, которые изменяются в процессе их работы, так как подводимая энергия, не затрачиваемая на процесс функционирования, рассеивается и накапливается в структуре технических устройств, приводя к неравномерному изменению начального теплового состояния частей, деталей, механизмов и систем, увеличивая их теплосодержание, и, следовательно, при протекании тепловых процессов обусловливает изменение заданных функциональных параметров положения, движения и состояния технических устройств, их частей, деталей, механизмов и систем.
Изменение положения, которое определяется тремя линейными и тремя угловыми смещениями, обусловлено температурными воздействиями и может быть как абсолютным, так и относительным между функциональными элементами.
Изменение движения, обусловленное температурными воздействиями, характеризуется траекторией (абсолютной или относительной) и характеристиками скорости, ускорения и другими динамическими составляющими.
Изменение состояния определяется температурным режимом и температурными деформациями частей, деталей и элементов, которые обусловлены соотношением количества подводимого и отводимого тепла, а также условиями соединения и их степенями свободы.
Задачей предлагаемого изобретения является создание способа автоматического управления тепловым состоянием и функциональными параметрами технических устройств, который позволил бы обеспечить повышение точности функционирования технических устройств, увеличение их надежности, стабильность поддержания уровня или диапазона величин функциональных выходных параметров положения, движения и состояния технических устройств в период их эксплуатации, осуществляемой без применения дополнительных механизмов, устройств и систем измерения температуры, и/или тепловых деформаций, и/или положения, и/или движения, и/или состояния теплонагруженных частей устройств.
Поставленная задача достигается тем, что в известном способе автоматического управления тепловым состоянием и функциональными параметрами технических устройств, заключающемся в установлении и определении вида и параметров тепловых функций технических устройств, по которым рассчитывают величины тепловых функций во время работы устройства и при их простоях, и введении коррекции в исполнительные органы через компьютерную систему числового управления в моменты достижения рассчитанными величинами установленных допустимых значений, согласно заявляемому изобретению определяют вид, характеристики изменения во времени типовых закономерностей тепловых функций положения, движения и состояния технических устройств, его теплонагруженных частей, узлов и деталей при их нагреве и охлаждении для каждого управляемого функционального параметра при работе технического устройства и при его простоях, для диапазона положений, движений и состояний теплонагруженных частей, узлов и деталей устройств, заданных условиями функционирования и эксплуатации, учитывающих скорость и вид изменения температуры окружающей среды, устанавливают при многократных испытаниях статистические характеристики изменения во времени тепловых функций нагрева и охлаждения для каждого управляемого функционального параметра при работе устройства и при простоях и по полученным характеристикам изменения во времени тепловых функций в рабочем объеме технического устройства в процессе его работы и при простоях рассчитывают величины, и/или положения, и/или движения, и/или состояния управляемого функционального параметра в соответствии с временем работы или простоя, для текущего диапазона положений, движений и состояний теплонагруженных частей, узлов и деталей технических устройств, и в моменты достижения рассчитанными с заданной вероятностью величинами, и/или положениями, и/или движениями, и/или состояниями установленных для них допустимых значений, обусловленных требуемым диапазоном точности параметров для каждого управляемого функционального параметра, осуществляют корректировку управляемого функционального параметра технического устройства через компьютерную систему числового управления путем изменения и воздействия на текущие параметры и характеристики функционирования, которые определяют уровень теплового режима или состояния теплонагруженных устройств.
Сущность изобретения поясняется чертежами.
На фиг.1 приведены типовые закономерности изменения температуры, положения, движения и состояния функциональных параметров технических устройств при нагреве-охлаждении.
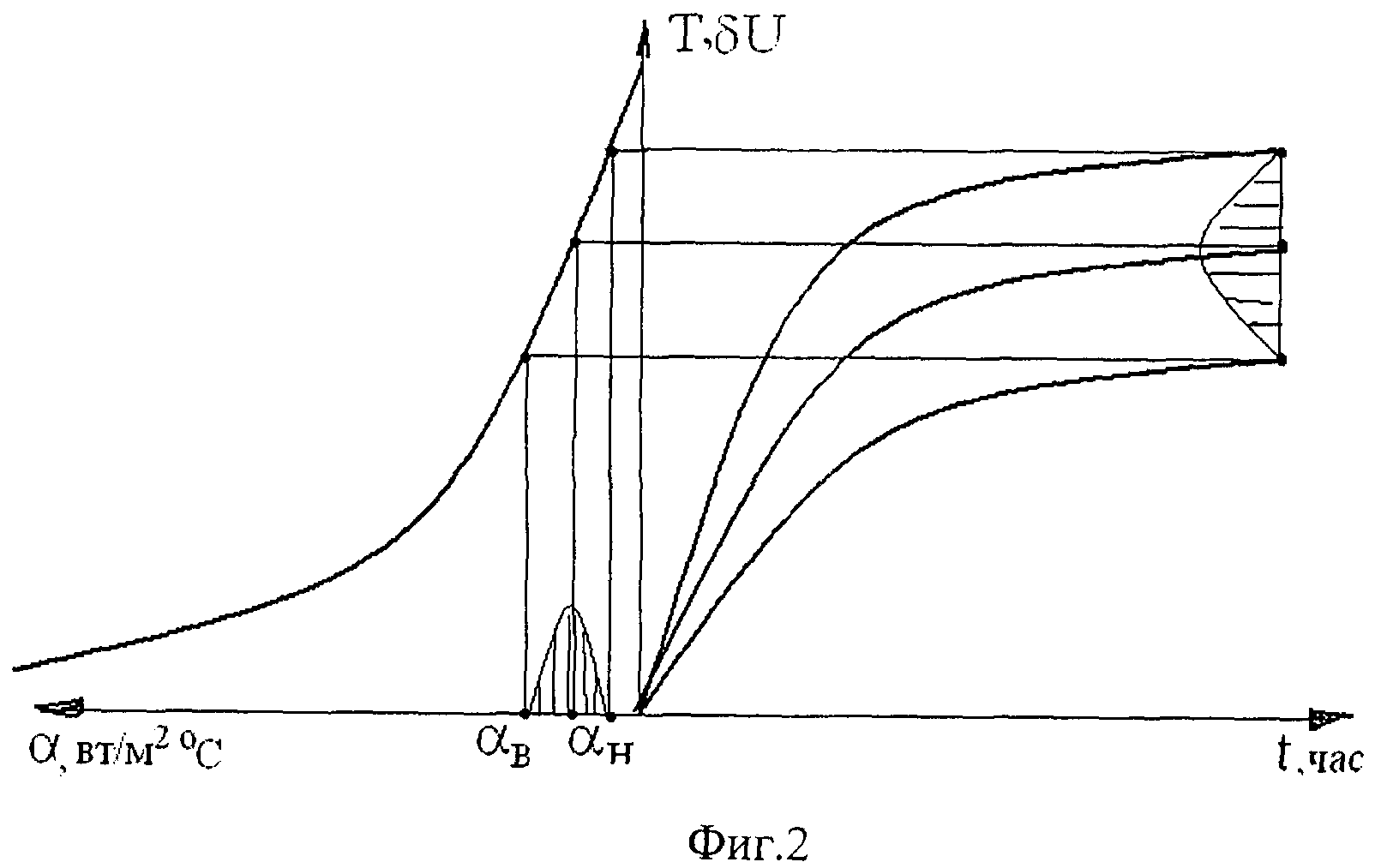
На фиг.2 показана принципиальная схема формирования случайного характера нагрева-охлаждения.
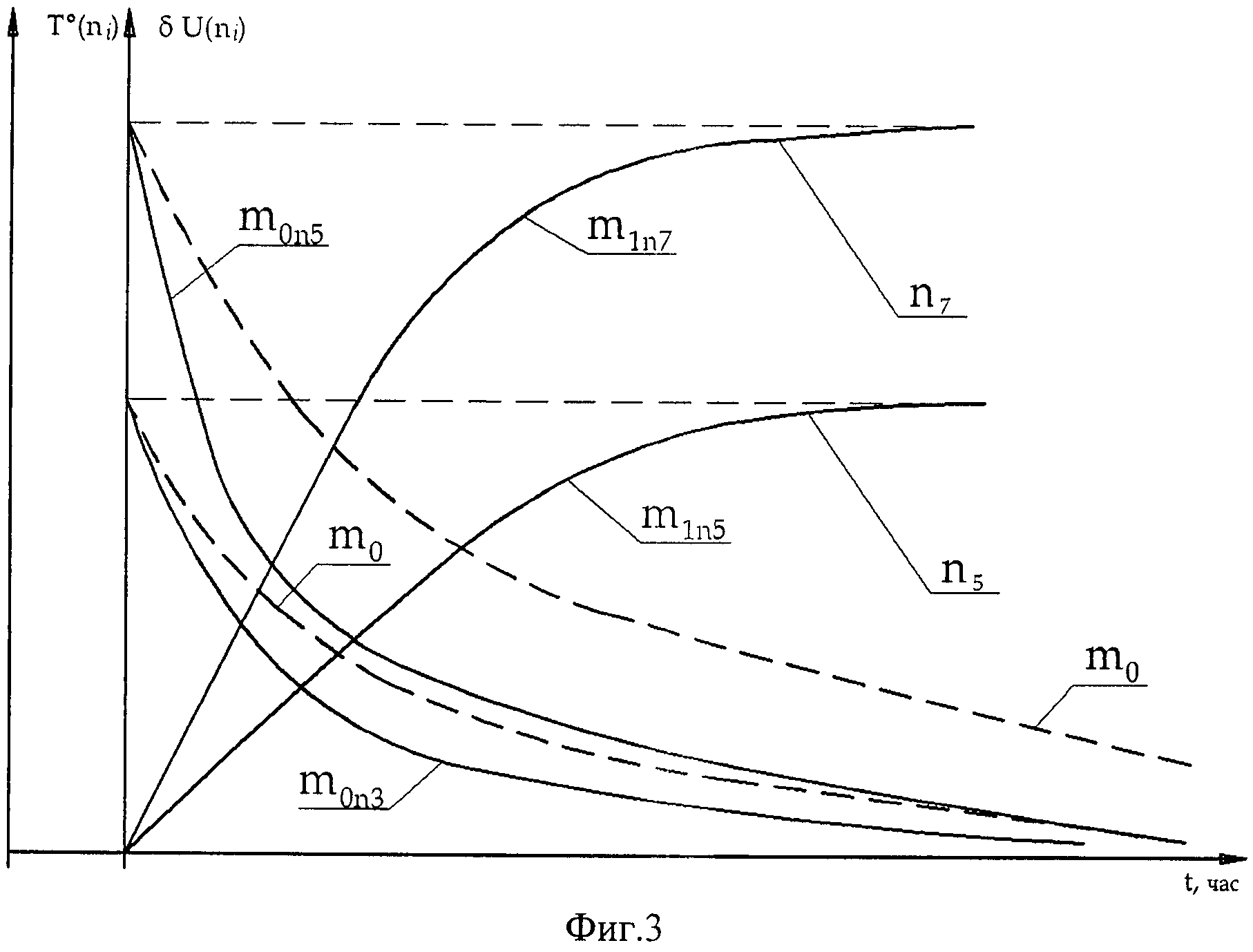
На фиг.3 приведены типовые тепловые функции изменения скорости для различных видов нагрева-охлаждения технических устройств.
На фиг.4 дана иллюстрация принципа и схема способа автоматического управления тепловым состоянием и функциональными параметрами технических устройств при последовательном изменении режима работы.
На фиг.5 приведена принципиальная схема способа автоматического управления тепловым состоянием автоматического управления тепловым состоянием и функциональными параметрами технических устройств при учете случайных составляющих нагрева-охлаждения.
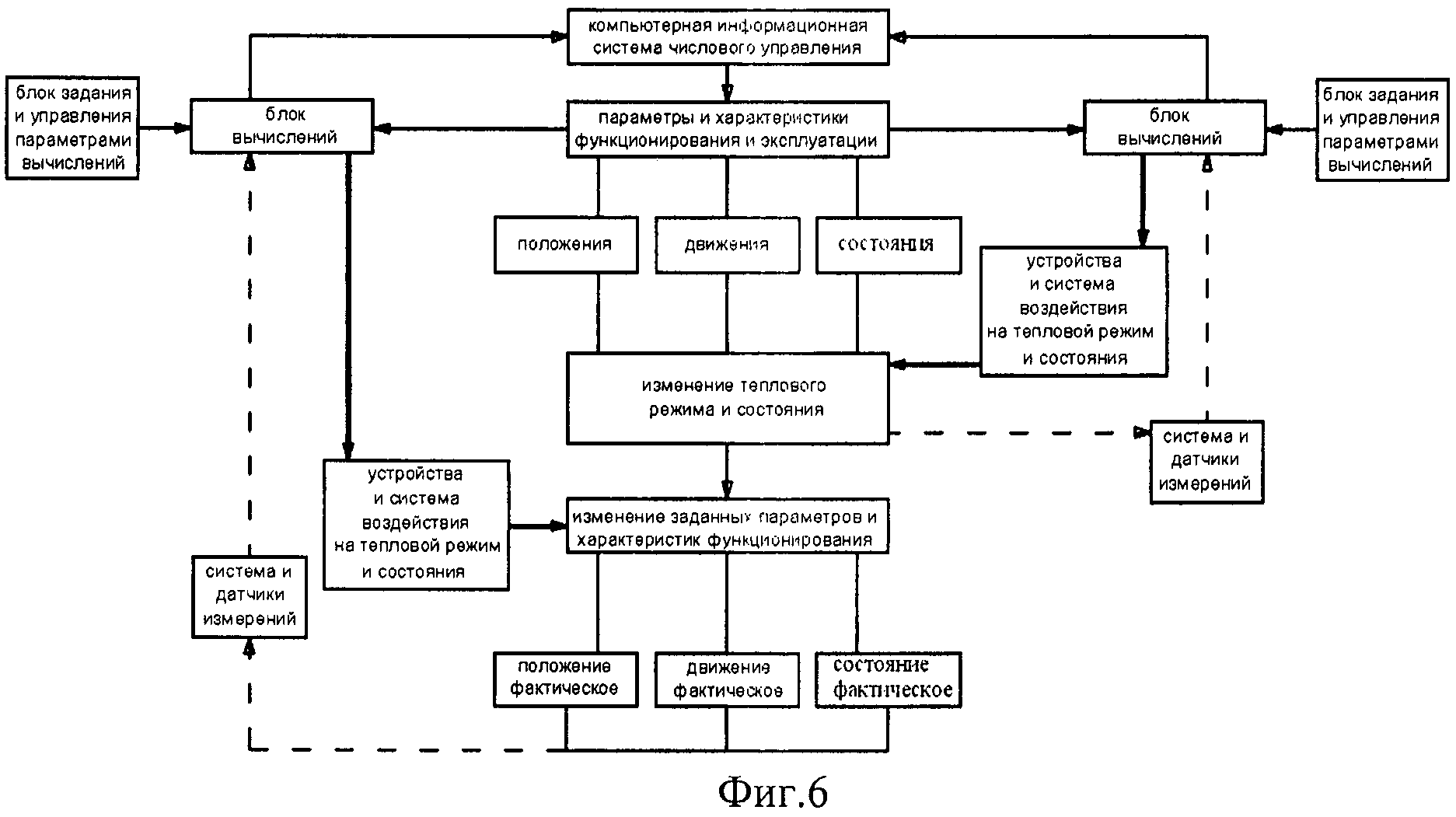
На фиг.6 показана функциональная схема способа автоматического управления тепловым состоянием и функциональными параметрами технических устройств с компьютерной информационной системой числового управления.
Заявленное изобретение осуществляется следующим образом. После сборки технического устройства производят его испытание по стандартным государственным или установленным техническими условиями программам. По результатам этих испытаний определяют вид, характеристики изменения во времени тепловых функций нагрева и охлаждения для каждого управляемого функционального параметра при работе технического устройства и при его простоях. Это определение осуществляют для диапазона положений, движений и состояний теплонагруженных частей, заданных условиями функционирования и эксплуатации. При этом фиксируются также скорость и вид изменения температуры окружающей среды. Указанные испытания проводят многократно, по результатам которых устанавливают статистические характеристики изменения во времени тепловых функций нагрева и охлаждения для каждого управляемого функционального параметра при работе технического устройства и при простоях. Полученные характеристики изменения во времени тепловых функций нагрева и охлаждения для каждого управляемого функционального параметра при работе технического устройства и при его простоях являются «паспортом» испытанного устройства, обобщенные параметры которого вводят в компьютерную систему числового управления. Далее в процессе работы устройства и при простоях по полученным функциям изменения теплового изменения во времени в рабочем объеме технического устройства компьютерная система через заданные промежутки времени рассчитывает величины, и/или положения, и/или движения, и/или состояния управляемого функционального параметра в соответствии с временем работы или простоя, для текущего диапазона положений, движений и состояний теплонагруженных частей.
В моменты достижения рассчитанных с заданной вероятностью величин, и/или положений, и/или движений, и/или состояний, установленных для них допустимых значений, обусловленных требуемым диапазоном точности для каждого управляемого функционального параметра, осуществляют корректировку управляемого функционального параметра технического устройства путем изменения и/или воздействия на текущие значения, параметры и характеристики управляемых функциональных параметров и/или изменения и воздействия на уровень теплового режима или состояния теплонагруженных частей технических устройств. Это воздействие, в некоторых случаях, может также осуществляться и с помощью специальных корректирующих устройств микроизменений управляемых компьютерной системой функциональных параметров.
Способ основан на том, что изменения во времени тепловых функций нагрева и охлаждения для каждого управляемого функционального параметра при работе технического устройства и при простоях происходит по типовым закономерностям, функциям (Фиг.1), характерным для каждого данного конструктивно-компоновочного решения на каждом режиме работы, в соответствии с взаимным относительным положением его теплонапряженных частей, узлов и деталей. Причем типовая функция, ее характер, скорость нагрева-охлаждения и величина определяются режимом работы (например, силой тока или частотой вращения) и изменением температуры окружающей среды и могут определяться разными типовыми функциями (фиг.1) для разных режимов и не всегда совпадающими друг с другом. Кроме этого, величина изменения во времени тепловых функций нагрева и охлаждения для каждого управляемого функционального параметра является случайной величиной (фиг.2), характеристики которой определяются качеством изготовления устройства, условиями теплообмена и являются его индивидуальными параметрами.
В процессе работы устройства по известным режимам и времени работы на них производят расчет значения величины тепловой функции по ранее установленным и введенным в компьютерную систему управления типовым функциям (фиг.1) для текущего состояния и/или положения и температуры окружающей среды в данный текущий момент времени. Далее производят изменение для каждого управляемого функционального параметра в направлении и на величину рассчитанного значения функции с заданной вероятностью (фиг.5), тем самым обеспечивается сохранение во время работы относительно стабильного и постоянного отклонения тепловой функции теплонагруженного устройства.
При остановке работы устройства или работе на более низком режиме, когда происходит снижение тепловыделений и происходит охлаждение технического устройства, его частей и узлов, зная типовые функции охлаждения, их характеристики и время охлаждения (или работы на более низком режиме), производят в компьютерной системе аналогичный расчет величины тепловой функции и далее также производят изменение для каждого управляемого функционального параметра в направлении и на величину рассчитанного значения функции и заданной вероятностью, тем самым обеспечивается сохранение во время работы относительно стабильного и постоянного отклонения тепловой функции теплонагруженного устройства.
Во всех случаях нагрева-охлаждения характеристика темпа или скорости нагрева-охлаждения не являются стабильно постоянными величинами для всех режимов работы и определяются как взаимным относительным положением теплонагруженных элементов, узлов и деталей, так и температурой окружающей среды, последовательностью и временем работы технического устройства на разных режимах и соответствующей им тепловой историей устройства.
Теплообмен любого тела или системы тел (техническое устройство является телом или системой тел) с окружающей средой подчиняется закону Ньютона-Рихмана и происходит на поверхности тела. Для случая, когда устройство, как система тел, нагревается источниками энергии, произвольно распределенными внутри тела или на его границах, и в предположении, что мощность источников неизменна во времени, температура среды постоянна, коэффициент теплоотдачи и теплофизические параметры материала не зависят от температуры и времени, процесс нагревания во времени можно разделить на стадии (согласно Г.М.Кондратьеву) иррегулярного и регулярного теплового режимов (Дульнев Г.Н. Тепло- и массообмен в радиоэлектронной аппаратуре. М.: Высшая школа, 1984. - 248 с.).
В регулярном режиме изменение температурного поля во времени имеет простую форму, с момента наступления этого режима натуральный логарифм разности температур любой точки тела изменяется во времени по линейному закону.
Таким образом, тепловые функции теплонагруженных частей, деталей и узлов технического устройства подчиняются закономерностям регулярного теплового режима и описываются простой экспоненциальной (как показали многочисленные экспериментальные исследования, зависимостью (фиг.1):

где ΔТу - температура в установившемся режиме, m - темп нагревания (охлаждения) однородного тела:

Здесь α, λ, c, a, γ - соответственно коэффициент теплоотдачи, теплопроводности, теплоемкости, температуропроводности, удельный вес;
M, V, S - соответственно масса, объем и площадь теплоотдающей поверхности; Ψ - коэффициент неравномерности температурного поля (в практических случаях, если α не стремится к бесконечности, можно принять Ψ=1).
Для определения ψ можно использовать выражение Ярышева Н.А.:

где Kn - критерий Г.М. Кондратьева; Biv=αRv/λ - критерий Био; Rv - обобщенный размер тела, равный отношению объема тела к площади его поверхности.
Если температура Tc окружающей среды и мощность Q источников тепловыделений технического устройства являются функциями времени, то для определения функции теплового поведения можно использовать выражение:
 ,
,
где Тн, Тсн, Qн - начальные значения температуры тела, окружающей среды и теплового потока, Тс - температура окружающей среды, С=сγV. Из (4) следует, что при Тс=Тн=Тс(τ)=const и для теплового потока Q=Q(τ)=const
- источник тепловыделения постоянно действующий и не зависит от времени, температура окружающей среды постоянна и равна начальной температуре устройства (Q=Q(τ)=const, Tc=Tн=Тс(τ)=const):

Если источник тепловыделения отсутствует, изменение температуры окружающей среды происходит по экспоненциальному закону до установившегося состояния
Общая зависимость изменения (теплового поведения) положения, движения и состояния частей, узлов и механизмов технических устройств из-за их температурных деформаций δU(ni) запишется в следующем виде:


где δU(ni), δU(0ni) - значение величины температуры, деформации соответственно при нагреве и охлаждении;
L1, L2 - значение величины температуры, деформации в установившемся режиме температурной стабилизации;
Т0 - текущее значение температуры окружающей среды;
ni - i-й режим работы устройства;
m1ni m2ni m0ni - темп или скорость нагрева на i-м режиме;
m0ni - темп или скорость охлаждения при переходе с i+1 на i-й режим;
m0=m0ni - темп или скорость охлаждения устройства при неработающем устройстве;
K0 Kni - коэффициенты пропорциональности.

где Kα - коэффициент изменения теплоотдачи для разных режимов работыустройства, q - показатель степени, определяемый соотношением критериев Рейнольдса и Грасгофа.
Тогда типовые закономерности изменения функции положения из-за температурных деформаций теплонагруженных частей, узлов и механизмов технических устройств δU(ni) запишутся в следующем виде:
1. При m1=m2, L1=L2 всегда U=0, а вид функции - прямая линия. С учетом случайных составляющих параметров формирования функций U получим полосу, параллельную оси времени, ширина которой равна значению дисперсии.
2. При m1=m2 и L1>L2 функция U во времени изменяется по экспоненциальному закону, а ее величина всегда положительна (см. фиг.1 линия 7).
3. При m1=m2 и L1<L2 значение функции U во времени изменяется по экспоненциальному закону, а ее величина всегда отрицательная (см. фиг.1 линия Г). 4. При m1>m2, L1=L2 значение U=L1-L2=0 в установившемся режиме при τ→∞.
Первая производная (2) через период времени τэ становится равной нулю и функция U принимает экстремальное значение:
Вторая производная через период времени Т принимает вид:

Значение функции U через период времени τэ определяется выражением:

Вторая производная принимает отрицательные (∂2U/∂τ2<0) значения, и ей будет соответствовать линия 5 на фиг.1.
5. При m1<m2 и L1=L2 значение функции U=L1-L2=0 в режиме τ→∞. Вторая производная (∂2U/∂τ2>0) принимает положительные значения (функция - линия 5' на фиг.1).
6. При m1>m2 и L1>L2 значение функции через период времени, определяемый уравнением (3), достигает максимума, величина которого определяется уравнением (4). Вторая производная ∂2U/∂τ2<0 (вид функции- линия 3 на фиг.1).
7. При m1>m2 и L1<L2 значение функции ∂2U/∂τ2<0 достигает максимума через период времени τэ (3), затем в установившемся режиме значения функции становятся отрицательными:
 и будут положительными при L2<0, m1>m2, L2/L2<m2/m1, т.е. функция имеет знакопеременный характер (линия 6 на фиг.1).
и будут положительными при L2<0, m1>m2, L2/L2<m2/m1, т.е. функция имеет знакопеременный характер (линия 6 на фиг.1).
При ∂2U/∂τ2=0 и ∂U/∂τ<0 функция имеет точку перегиба, и ее значение всегда отрицательное (линия 7' на рис.7) при выполнении условия  . Время, через которое функция достигнет точки перегиба,
. Время, через которое функция достигнет точки перегиба,  .
.
8. При m1<m2 и L1>L2 значение функции 4 (см. фиг.1) достигает минимума (∂2U/∂τ2>0) через период времени τэ, затем в установившемся режиме значения функции становятся положительными (L1-L2>0):
 при L2>0, m1<m2 и L1/L2>m2/m1, т.е функция имеет знакопеременный характер ((см. фиг.1 линия 4). При ∂2U/∂τ2=0 и ∂U/∂τ>0 функция имеет точку перегиба и ее значение всегда положительное (см. фиг.1 линия 7) при условии
при L2>0, m1<m2 и L1/L2>m2/m1, т.е функция имеет знакопеременный характер ((см. фиг.1 линия 4). При ∂2U/∂τ2=0 и ∂U/∂τ>0 функция имеет точку перегиба и ее значение всегда положительное (см. фиг.1 линия 7) при условии  .
.
9. При m1<m2 и L1<L2 функция достигает минимума (∂2U/∂τ2>0) (см. фиг.1 линия 3'),
Таким образом, характеристики типовых функций изменения теплового состояния являются общими для всех видов технических и технологических устройств (машин, объектов) и заносятся в память компьютерной информационной системы числового управления техническими или технологическими устройствами, а значения величин этих характеристик после испытания устройства также заносятся в память, которые являются индивидуальными значениями каждого изделия.
Следовательно, характеристиками и параметрами, определяющими «образ» теплового состояния технических устройств, являются:
ΔТу - температура в установившемся состоянии на i-м режиме работы;
L1, L2 - значение величины деформации (температуры) установившемся режиме температурной стабилизации;
ML1, ML2 - значение математического ожидания з величины деформации (температуры) в установившемся режиме температурной стабилизации;
σL1 σL2 - значение среднего квадратического отклонения величины деформации (температуры) в установившемся режиме температурной стабилизации;
m1ni m2ni m0ni - темп или скорость нагрева на i-м режиме работы;
m0ni - темп или скорость при охлаждении с (1+1)-й на i-й режим;
m0=m0ni - темп или скорость охлаждения устройства при отсутствии его работы;
Kα, K0, Kni - коэффициенты пропорциональности;
Δi - установленное допустимое значение i-го управляемого функционального параметра;
вероятность Pi(t) достижения установленного Δi допустимого значение i-го управляемого функционального параметра.
Вероятность Pi(t) определяется выражением:

Рассмотрим процесс автоматического управления тепловым состоянием и функциональными параметрами технических устройств (фиг.4, 5, 6) с момента включения технического или технологического изделия на режимах работы n1, n2, n3 в течение времени работы на этих режимах соответственно t1, t3, t5; t1=t1(n3), t2=t2(n2)-t1(n2), t3=t3(n1)-t2(n1), при охлаждении - темп охлаждения равен соответственно m0, при охлаждении, когда происходит переключение с большего режима на меньший с n1 на n3, темп охлаждения равен соответственно m03. В этом случае показан принцип управления, функциональным параметром, когда расчеты теплового состояния технических устройств производятся без учета случайных составляющих.
На фиг.5 показан принцип автоматического управления тепловым состоянием и функциональными параметрами технических устройств при работе на режимах n1 и n2, когда управление производится с учетом случайных составляющих. Если вероятность достижения теплового состояния функциональным параметром принять равной 0,5, то в этом случая управление соответствует такому же случаю, когда случайные составляющие не учитываются и время проведения управления будет значительно больше, т.е. на величину [t2(n2) P(t)=0,5]-[t2(n2) P(t)=0,997], а достигаемая точность управления снижается (фиг.5).
Функциональная схема способа автоматического управления тепловым состоянием и функциональными параметрами технических устройств с компьютерной информационной системой приведена на фиг.6., где пунктиром показаны устройства, которые применялись бы на основе других способов управления, как это приведено в прототипах.
Автоматического управления тепловым состоянием и функциональными параметрами технических устройств, технического или технологического изделия (положения, движения, состоянии) как при нагреве, так и при охлаждении производят через установленную для каждого управляемого функционального параметра величину Δi. Величина Δi и вероятность (фиг.4, 5, 6) ее достижения Pi(t) устанавливается для каждого условия или вида эксплуатации, исходя из требуемой величины функционального параметра (или его значения точности) и необходимости обеспечения ее сохранения во времени, и вводится в память компьютерной системы числового управления технического устройства.
При пуске технического устройства или технологического изделия и начале его работы в вычислительное устройство компьютерной информационной системы числового программного управления поступают данные о текущем времени работы t1, режиме работы функционального параметра ni, текущем положении и состоянии функциональных параметров теплонагруженных устройств, температуре окружающей среды. Значения функциональных параметров рассчитываются непрерывно с установленной дискретностью времени Δti по функциям (1-8).
Период времени Δti проведения системой ЧПУ расчетов величин температурных смещений оси шпинделя δU(ni) должен выбираться из диапазона 0-Δti, при выполнении следующего условия:

При достижении вычисленных по (1-8) величин температур (смещений, состояний) по каждому функциональному параметру, равных Δi и ее вероятности Pi(t), производится управление положением, движением и состоянием с помощью компьютерной системы управления путем изменения функционального параметра управления теплонагруженного устройства в требуемом направлении. Через время t1 происходит переключение режима работы на n2, при этом алгоритм работы автоматизированной системы повторяется. Если заданная вероятность Pi(t) достижения величины температур (положений, состояний) по каждому функциональному параметру, равных Δi, не обеспечивается, то управление функциональными параметрами производится в момент ее достижения. Аналогично описанному происходит работа системы управления на режиме n3 и т.д.
При охлаждении расчет также происходит непрерывно через периоды времени Δti. При достижения величины температур (положений, состояний) по каждому функциональному параметру, равных Δi, с вероятностью Pi(t) управление функциональными параметрами производится в момент ее достижения.
Таким образом, в течение всего периода эксплуатации происходит работа автоматического управления тепловым состоянием и функциональными параметрами технических устройств. В любой период эксплуатации параметры управления могут быть установлены или изменены с помощью блока задания функциональных параметров.
Использование предлагаемого способа позволяет обеспечить существенное повышение точности функционирования технических устройств, увеличение их надежности, стабильность поддержания уровня или диапазона величин выходных параметров положения, движения и состояния технических и технологических устройств в период их эксплуатации без применения дополнительных механизмов, устройств и систем измерения температуры, и/или тепловых деформаций, и/или положения, и/или движения, и/или состояния теплонагруженных устройств.
Анализ заявленного технического решения на соответствие условиям патентоспособности показал, что указанные в независимом пункте формулы признаки являются существенными и взаимосвязаны между собой с образованием устойчивой совокупности, неизвестной на дату приоритета из уровня техники необходимых признаков, достаточной для получения требуемого синергетического (сверхсуммарного) технического результата.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного технического решения следующей совокупности условий:
- объект, воплощающий заявленное техническое решение, при его осуществлении предназначен для автоматического управления тепловым состоянием теплонагруженных устройств с компьютерной системой числового программного управления, может быть использован во всех областях космического, авиационного, радиотехнического, приборостроительного и производственного машиностроения для автоматического управления тепловым состоянием теплонагруженных устройств технических и технологических машин и устройств;
- для заявленного объекта в том виде, как он охарактеризован в независимом пункте нижеизложенной формулы, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных из уровня техники на дату приоритета средств и методов;
- объект, воплощающий заявленное техническое решение, при его осуществлении способен обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленный объект соответствует требованиям условий патентоспособности «новизна», «изобретательский уровень» и «промышленная применимость» по действующему законодательству.
Способ автоматического управления тепловым состоянием и функциональными параметрами технических устройств, заключающийся в установлении и определении вида и параметров тепловых функций технических устройств, по которым рассчитывают величины тепловых функций во время работы устройства и при их простоях, и введении коррекции в исполнительные органы через компьютерную систему числового управления в моменты достижения рассчитанными величинами установленных допустимых значений, отличающийся тем, что определяют вид, характеристики изменения во времени типовых закономерностей тепловых функций положения, движения и состояния технических устройств, его теплонагруженных частей, узлов и деталей при их нагреве и охлаждении для каждого управляемого функционального параметра при работе технического устройства и при его простоях, для диапазона положений, движений и состояний теплонагруженных частей, узлов и деталей устройств, заданных условиями функционирования и эксплуатации, учитывающих скорость и вид изменения температуры окружающей среды, устанавливают при многократных испытаниях статистические характеристики изменения во времени тепловых функций нагрева и охлаждения для каждого управляемого функционального параметра при работе устройства и при простоях и по полученным характеристикам изменения во времени тепловых функций в рабочем объеме технического устройства в процессе его работы и при простоях рассчитывают величины, и/или положения, и/или движения, и/или состояния управляемого функционального параметра в соответствии с временем работы или простоя, для текущего диапазона положений, движений и состояний теплонагруженных частей, узлов и деталей технических устройств, и в моменты достижения рассчитанными с заданной вероятностью величинами, и/или положениями, и/или движениями, и/или состояниями установленных для них допустимых значений, обусловленных требуемым диапазоном точности параметров для каждого управляемого функционального параметра, осуществляют корректировку управляемого функционального параметра технического устройства через компьютерную систему числового управления путем изменения и воздействия на текущие параметры и характеристики функционирования, которые определяют уровень теплового режима или состояния теплонагруженных устройств.
Способ автоматической компенсации тепловых смещений шпинделя металлорежущего станка с числовым программным управлением
Запорная арматура с автономной системой уплотнения
Способ коррекции позиционирования подвижных органов станка в процессе обработки
Способ компенсации тепловых деформаций исполнительных узлов металлорежущего станка с чпу
Способ компенсации тепловых деформаций металлорежущих станков с чпу
Способ управления охлаждением высокоскоростного мотор-шпинделя металлорежущего станка
Способ автоматической компенсации тепловых смещений шпинделя металлорежущего станка с числовым программным управлением
Запорная арматура с автономной системой уплотнения
Способ коррекции позиционирования подвижных органов станка в процессе обработки
Способ компенсации тепловых деформаций исполнительных узлов металлорежущего станка с чпу
Способ компенсации тепловых деформаций металлорежущих станков с чпу
Способ управления охлаждением высокоскоростного мотор-шпинделя металлорежущего станка

