Результат интеллектуальной деятельности: КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ
Вид РИД
Изобретение
Изобретение относится к области неразрушающего контроля и может быть использовано для испытаний и отладки инерциальных навигационных систем внутритрубных снарядов топографов и топографических систем внутритрубных снарядов - дефектоскопов.
Известны устройство УПГ-46 и наклонно-поворотный стол КПА-5, которые используются для испытаний в лабораторных условиях инерциальных приборов (гироскопов и акселерометров) и инерциальных систем с целью оценки погрешностей систем и приборов. Однако эти устройства не позволяют произвести оценку кинематических ошибок инерциальной системы внутритрубного инспектирующего снаряда в процессе его движения по трассе при комплексном воздействии реальных механических возмущений, возникающих на трассе.
Известен также комплекс для испытания инерциальных систем навигации [Сайт: GPS/INS Integration], использующий в качестве подвижного средства автомобиль, оснащенный приемной аппаратурой спутниковой навигационной системы GPS. В кабине автомобиля размещается испытуемая инерциальная навигационная система (ИНС). Автомобиль перемещается по заранее выбранной замкнутой траектории. Данные GPS и испытуемой ИНС записываются в процессе движения подвижного объекта по выбранной трассе, сравниваются и определяется разница в показаниях GPS и ИНС.
Недостатком известного устройства является неполнота контроля: регистрации пути, оцениваемого по показаниям движущегося приемника GPS, которые при перемещении приемника отличаются от показаний, получаемых в отдельных точках трассы при неподвижном приемнике; отсутствие устройств, имитирующих вращение испытуемой системы вокруг продольной оси, что наблюдается на реальных трубопроводах; существенные отличия механических возмущений, действующих на испытуемую систему в кабине автомобиля, от механических возмущений, наблюдаемых на борту внутритрубного инспектирующего снаряда (ВИС) при его перемещении в реальном трубопроводе.
Наиболее близким к предлагаемому комплексу является комплекс [Multi-aided Inertial Navigation for GroundVehicles in Outdoor Uneven Environments Bingbing Liu†, Martin Adams†, Javier Iba~nez-Guzm.an (Многоцелевая инерциальная навигация для наземных подвижных устройств в условиях неравномерного окружения на открытом воздухе)], использующий в качестве подвижного средства автомобиль, на крыше которого размещена приемная аппаратура GPS, а к заднему колесу присоединен датчик вращения колеса, то есть сформирован колесный одометр. Испытуемая ИНС устанавливается на полу в кабине автомобиля. Образцовая траектория движения регистрируется по показаниям GPS. Путь оценивается по показаниям одометра, связанного с одним из колес. Оценка точности ИНС ведется сравнением записанных ею данных с образцовыми.
Недостатками известного комплекса являются:
Отсутствие в комплексе возможности вращения испытуемой системы вокруг продольной оси (то есть неполнота имитации движений испытуемой системы), несовпадение пути, измеренного одометром, и длины траектории движения испытуемой ИНС, размещенной в кабине автомобиля, из-за разнесенного в пространстве положения испытуемой ИНС и положения одометра, связанного с одним из колес автомобиля, существенные отличия механических возмущений в кабине автомобиля от механических возмущений в реальном газопроводе, неполнота модели из-за отсутствия стационарных реперных пунктов с маркирующими устройствами, имеющими известные точные географические координаты. Это не позволяет с достаточной точностью оценить погрешность испытуемой ИНС.
В настоящее время для внутритрубных инспектирующих снарядов (ВИС) используются бескарданные инерциальные навигационные системы, сохраняющие работоспособность в условиях сильных вибраций и ударов, которыми сопровождается движение ВИС внутри инспектируемого трубопровода. Как известно [iPST-RQH iPST-FJI iPST-FMS (IMS for Pipeline Surveying Tool and Measuring While Drilling Technical Manual. iMAR GmbH. Im Reihersbruch 3, D-66386 St. Ingbert (Инерциальная Измерительная Система для внутритрубного инспектирующего снаряда и для измерений в процессе бурения)], бескарданная инерциальная навигационная система (ИНС) внутритрубного инспектирующего снаряда представляет собой программно-аппаратный комплекс, состоящий из трех датчиков угловых скоростей, трех линейных акселерометров, одометра (обычно колесного) в качестве датчика скорости продольного движения ВИС, электромагнитных датчиков сигналов маркирующих устройств, бортовой системы счисления точного времени, бортового компьютера, бортового запоминающего устройства, программного обеспечения. Кроме того, обязательной частью навигационной системы является наземный компьютер с соответствующим программным обеспечением, комплекс маркирующих устройств, разбивающих трассу обследуемого трубопровода на отдельные участки. Так как целью ИНС является привязка продольной оси трубопровода к географическим координатам, а точность инерциальной системы ограничена, то прибегают к коррекции инерциальной системы с использованием отдельных точек на трассе, помеченных специальными маркерами, географические координаты которых известны.
Для получения точных координат маркирующих устройств, расставленных вдоль трубопровода, используется спутниковая навигационная система ГЛОНАСС или GPS. Так как ВИС движется внутри заглубленной в грунт стальной трубы, то вся точность определения текущих координат между известными пунктами зависит от точности ИНС, точности корректирующих алгоритмов и точности привязки к географическим координатам позиций, на которых размещены маркирующие устройства (маркеры). Необходимость снижения стоимости ИНС приводит к тому, что разработчики стремятся установить на борту ВИС дешевые инерциальные приборы, а для коррекции их ошибок прибегать к использованию отдельных, точно привязанных к географическим координатам точек на трубопроводе. Чем реже размещены вдоль трассы трубопровода маркеры, тем менее затраты и в подготовке трассы к проведению внутритрубной дефектоскопии. Но при этом понижается точность получаемых данных. Обычно маркеры размещают с интервалом от 1 до 5 км. Маркированные точки четко идентифицируются в записываемых данных ВИС благодаря специальным аппаратным решениям. Экспериментально было проверено, что при движении двухколесного подвижного устройства со скоростью 10 км/ч по обочине проселочной дороги с твердым покрытием в месте, расположенном над задним колесом подвижного устройства (велосипед, мотороллер), наблюдаются линейные ускорения до 2 g в диапазоне частот от 1 до 100 Гц. Это практически соответствует механическим возмущениям, действующим на ВИС при его перемещении в газопроводе со скоростью 2-3 м/с (7-10 км/ч). Кроме того, проселочные дороги имеют кривизну, соответствующую кривизне реальных трубопроводов, прокладываемых в средней полосе РФ. Это позволяет использовать проселочные дороги в качестве полунатурной модели газопровода. Отмечено также, что траектория движения точки, расположенной над осью заднего колеса велосипеда или мотороллера, практически повторяет в плане траекторию перемещения по дороге пятна контакта с дорожным покрытием шины заднего колеса. По этой причине можно считать длину пути, пройденного задним колесом подвижного устройства, равной длине траектории, по которой перемещается точка, расположенная над задним колесом.
Целью изобретения является создание комплекса для полунатурных испытаний инерциальных навигационных систем внутритрубных инспектирующих снарядов, позволяющего наиболее полно проверить работу всех узлов бортовой аппаратуры инерциальной навигационной системы в условиях, максимально приближенных к реальным, и обеспечить высокую точность определения погрешности инерциальной навигационной системы.
В комплекс для полунатурных испытаний инерциальных навигационных систем внутритрубных инспектирующих снарядов, состоящий из испытательной трассы, подвижного средства, снабженного одометром, приемной аппаратуры спутниковой навигационной системы GPS или ГЛОНАСС, введены устройство для вращения испытуемой инерциальной навигационной системы вокруг продольной оси, программируемый контроллер управления направлением вращения вала вращающего устройства, вращающийся соединитель электрической сигнальной цепи, катушка индуктивности для приема сигналов маркерных устройств, группа маркерных устройств, причем в качестве подвижного устройства используется двухколесный с продольным размещением колес велосипед или мотороллер, при этом корпус испытуемой бескарданной инерциальной навигационной системы с источником питания крепится на осях вращающего устройства, которое размещается над задним колесом подвижного объекта, к заднему колесу которого прижато колесо одометра, выходные электрические цепи датчиков которого соединены с соответствующими входными цепями программируемого контроллера управления направлением вращения вала вращающего устройства, соответствующие выходы программируемого контроллера управления направлением вращения вала вращающего устройства соединены с входными цепями вращающегося соединителя электрической сигнальной цепи, выходы которого соединены со входом испытуемой инерциальной навигационной системы, предназначенным для ввода сигналов пути, входы приемника сигналов маркера которой соединены с выводами катушки индуктивности, установленной на корпусе вращающего устройства соосно с ним, а выводы управления электродвигателем вращающего устройства соединены с соответствующими выходами контроллера управления направлением вращения вала вращающего устройства, при этом маркерное устройство выполнено в виде немагнитной вешки, на вершине которой укреплена катушка индуктивности, выводы которой соединены с выходом низкочастотного генератора переменного тока, цепи питания которого соединены с гальванической батареей, при этом, маркерные устройства установлены на некоторой дистанции одно от другого, вдоль трассы, имитирующей трассу трубопровода так, чтобы ось катушки индуктивности маркерного устройства была направлена параллельно направлению дороги, имитирующей трассу трубопровода, при этом пространственные координаты маркерного устройства определяются с помощью дифференциальной спутниковой навигационной системы, а трасса, имитирующая трубопровод, выполнена в виде узкого путепровода (тропы) или в виде проселочной дороги.
Создание «Комплекса для полунатурных испытаний инерциальных навигационных систем внутритрубных инспектирующих снарядов» вызвано практической необходимостью обеспечения высокоточной аттестации навигационной системы средств диагностики технического состояния стенок трубопроводов. Предлагаемое устройство позволит проводить отладку и метрологическую аттестацию навигационной аппаратуры на земной поверхности, что существенно удешевляет и ускоряет отладочные работы и тестирование. Проведение отладки ИНС ВИС внутри реальных действующих газо-, нефте-, продуктопроводов существенно дороже и длительнее, так как газо-, нефте-, продуктопроводы практически всегда находятся в режиме эксплуатации и расположены обычно на большом удалении от места расположения организации - разработчика, кроме того, они находятся в распоряжении транспортных предприятий, в планах которых подобные работы, требующие иногда прекращения транспортировки поставляемого продукта или изменения скорости транспортировки, не предусмотрены и снижают доход предприятия, если не предусмотрена компенсация потерь за счет организации, желающей провести испытания создаваемого устройства сразу на реальном действующем трубопроводе. Внедрение предлагаемого устройства позволит удешевить и ускорить отладку и аттестацию систем навигации внутритрубных снарядов-топографов и прочих внутритрубных инспектирующих снарядов, что является показателем экономической целесообразности изобретения. Предлагаемый «Комплекс для полунатурных испытаний инерциальных навигационных систем внутритрубных инспектирующих снарядов» вызван практической необходимостью точного знания эксплуатационных характеристик навигационных систем, предлагаемых для географической привязки дефектов в стенках труб магистральных трубопроводов.
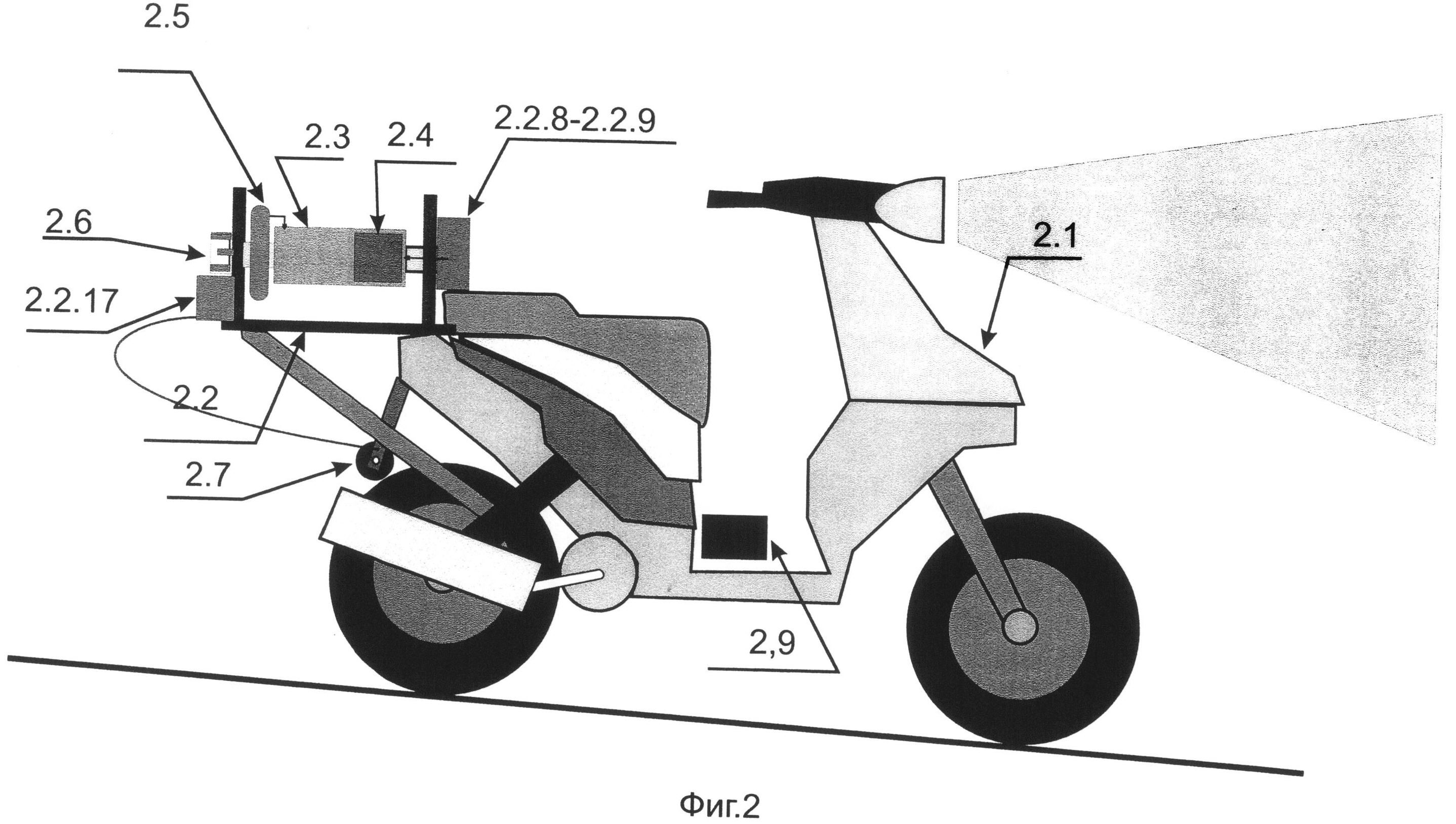
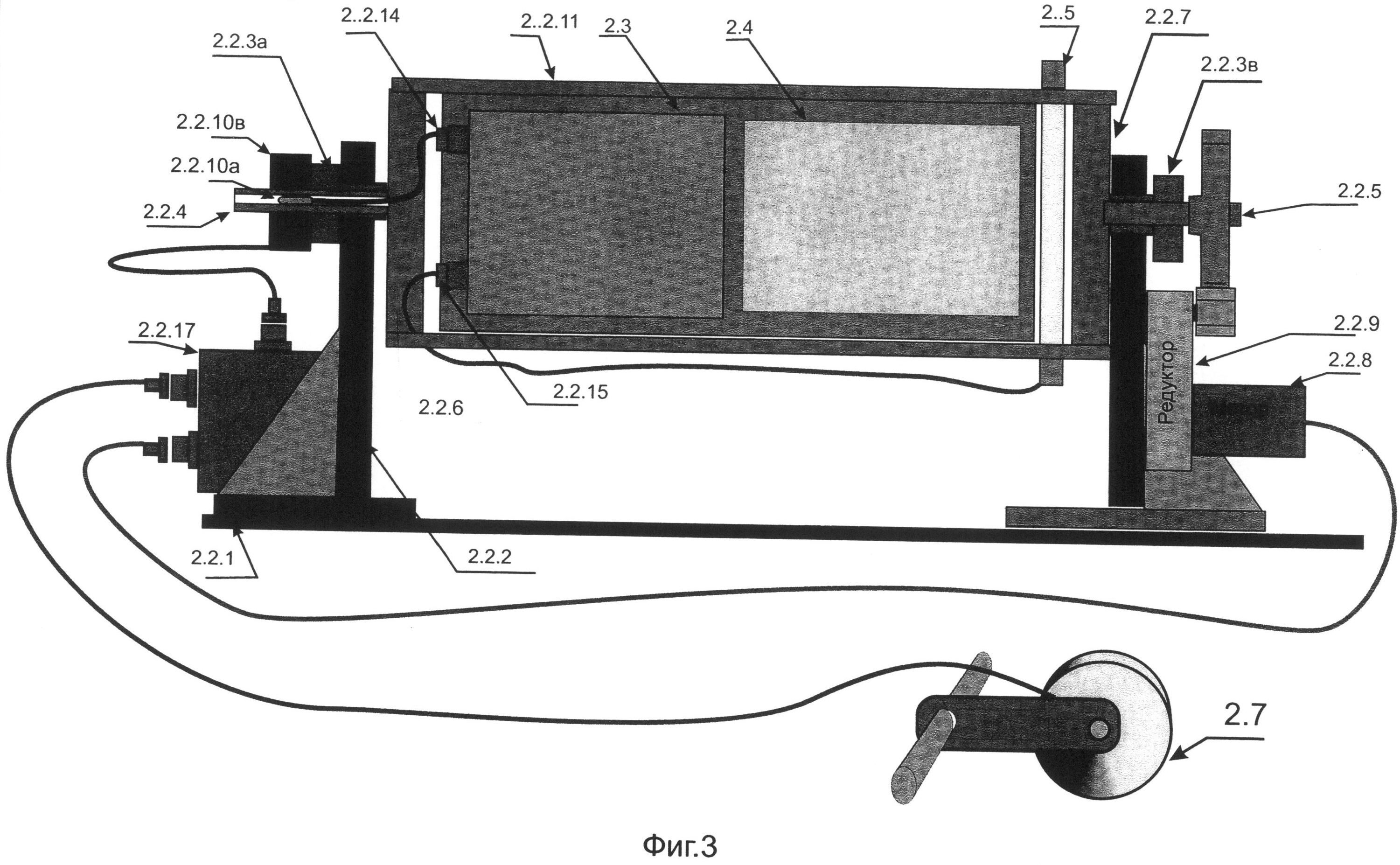
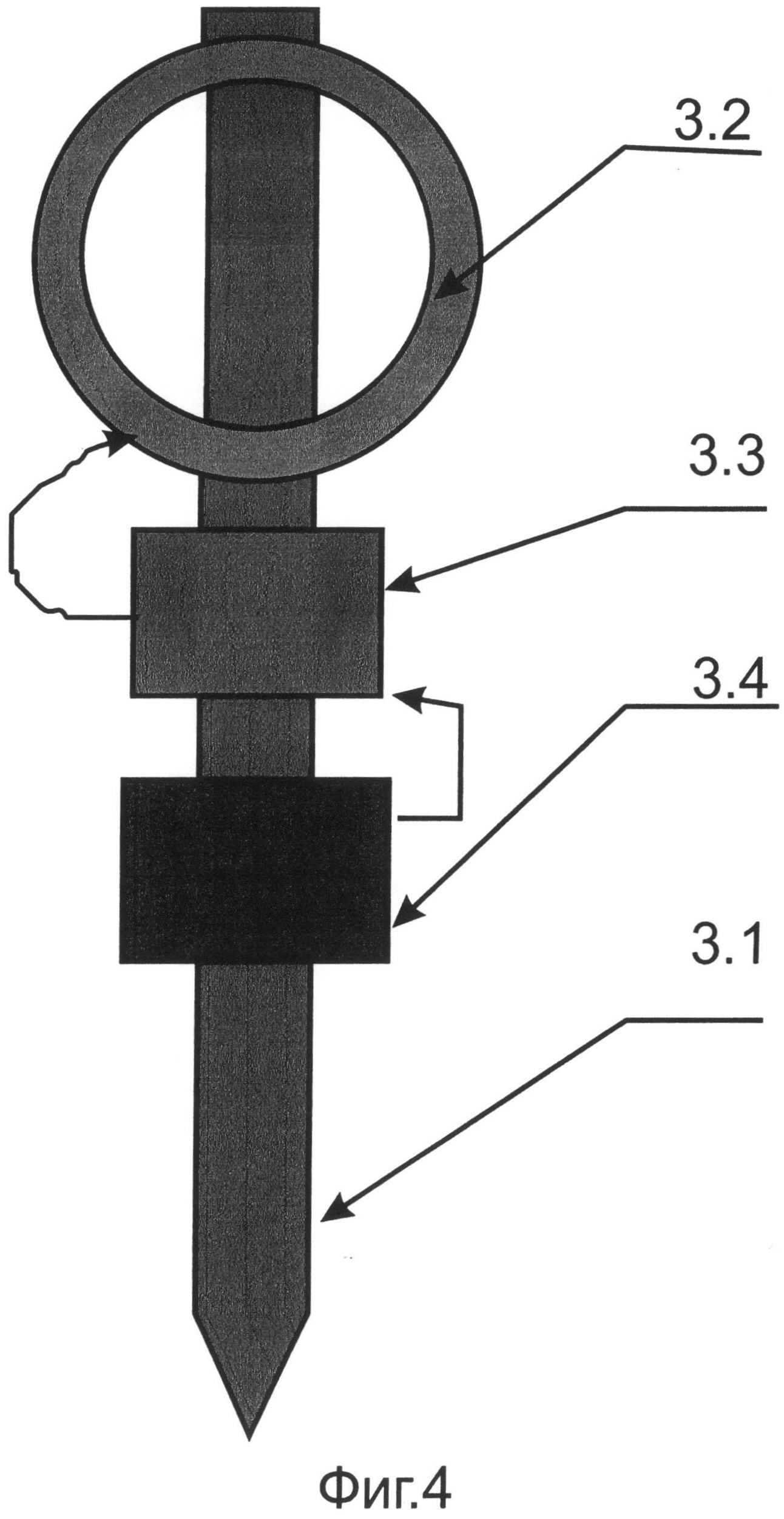
Изобретение поясняется фигурами. На фиг.1 показана общая схема комплекса, на фиг.2 показана мобильная часть комплекса, на фиг.3 показано вращающее устройство, на фиг.4 показано устройство маркера.
Комплекс состоит (фиг.1) из путепровода (трассы) 1, подвижного устройства 2, маркеров 3, ГЛОНАСС (GPS) приемника 4, переносного компьютера 5. Мобильная часть 2 комплекса (фиг.2) состоит из мотороллера 2.1, вращающего устройства 2.2, испытуемой БИНС 2.3 с источником питания 2.4, катушки индуктивности 2.5, вращающегося электрического соединителя 2.6, колесного одометра 2.7, источника питания 2.9, электропривода 2.2.8-2.2.9 вращающего устройства, контроллера 2.2.17.
Вращающее устройство 2.2 (фиг.3) состоит из основания 2.2.1, стоек 2.2.2, подшипников 2.2.3, оси 2.2.4, вала 2.2.5, первого 2.2.6а и второго 2.2.6в держателей, прижимных планок 2.2.11 электродвигателя 2.2.8, редуктора оборотов 2.2.9, вращающегося электрического соединителя 2.2.10, контроллера 2.2.17. Поверх прижимных планок 2.2.11 размещена катушка индуктивности 2.5 приемника сигналов маркеров.
Маркерное устройство 3 (фиг.4) состоит из вешки 3.1, катушки индуктивности 3.2, генератора тока низкой частоты 3.3, источника питания 3.4.
Работает устройство следующим образом. Специальная одноколейная трасса 1 может быть построена искусственно в виде одноколейной тропы с нужными радиусами поворота и наклонами по углу места. В качестве трассы 1 может быть использована мало загруженная транспортом сельская дорога, на которой присутствуют нужные изгибы в горизонтальной плоскости и наклоны в вертикальной плоскости. Протяженность трассы может быть любая, например 5, 10 и более километров. Точка начала измерительной части трассы помечается вешкой 3s. Точка окончания измерительной части трассы помечается вешкой 3f. С желаемым интервалом, например, 500 м вдоль трассы расставляется множество вешек 3. Вешки устанавливаются так, чтобы вектор магнитной индукции, формируемый катушкой 3.1 (фиг.3), был направлен параллельно направлению трассы 1 в месте установки маркера. Географические координаты каждой вешки 3 в пространстве определяются с помощью дифференциальной системы ГЛОНАСС или DGPS. При этом регистрируется географическая широта ωi, географическая долгота λi и высота места Hi над уровнем моря у каждой i-той вешки. На подвижном устройстве 2.1 (фиг.2) крепится вращающее устройство 2.2. и одометр 2.7. Колесо одометра 2.7 поджимается пружиной к заднему колесу подвижного устройства 2.1. Перед работой соответствующие интерфейсные входы контроллера 2.2.17 соединяются с соответствующими интерфейсными входами переносного компьютера 5 и в память контроллера 2.2.17 вводится программа управления вращением испытуемой системы вдоль ее продольной оси. Питание одометра 2.7 и контроллера 2.2.17 осуществляется от автономного источника тока 2.9. Корпус испытываемой инерциальной навигационной системы 2.3 (фиг.3) и источник 2.4 питания ИНС совместно крепятся прижимающими планками 2.2.11 на держателях 2.2.6 и 2.2.7 вращающего устройства 2.2.
Для передачи импульсных сигналов одометра на вращающуюся вокруг продольной оси инерциальную систему 2.3 можно использовать вращающееся электрическое соединение, например скользящие контакты, вращающийся трансформатор или устройство специальной конструкции, например, выполненное с использованием соленоида 2.2.10в и датчика Холла 2.10.а. Такое устройство не имеет дребезга контактов при ударных нагрузках и обладает широкой полосой пропускания, передаваемых сигналов. Это свойство необходимо для передачи сигналов одометра, импульсы которого могут менять как длительность, так и частоту следования от долей Герца до единиц килогерц. При этом выводы одометра 2.7 соединяются с соответствующими входами контроллера 2.2.17, где происходит усиление и формирование фронтов сигналов одометра с соответствующих выходов которого импульсные сигналы поступают на катушку соленоида 2.2.10в. Сигнальные выходы датчика Холла 2.2.10а соединены со входами регистратора испытуемой БИНС 2.3, предназначенными для записи сигналов одометра.
Для приема сигналов маркера используется катушка индуктивности 2.5, установленная снаружи над стальными прижимными планками 2.2.11 вращающего устройства 2.2. Стальные планки 2.2.11 выполняют функцию ферромагнитных сердечников в магнитной антенне, образованной катушкой 2.5 и планками 2.2.11. Выводы катушки индуктивности 2.5 соединены со входами регистратора ИНС 2.3, предназначенными для приема сигналов маркеров с целью их регистрации. Силовые выводы контролера 2.2.17 соединяются с соответствующими выводами электродвигателя 2.2.8. В соответствии с программой, записанной в память контроллера 2.2.17, контроллер управляет вращением двигателя 2.2.8, изменяя режим его работы в зависимости от пройденного пути. Путь счисляется в самом контроллере 2.2.17 с использованием сигналов одометра 2.7. Это позволяет изменять направление вращения двигателя 2.2.8 на разных участках пути или прекращать его вращение вообще. Как известно, ВИС в процессе перемещения в трубопроводе может вращаться в произвольную сторону или двигаться без вращения. Программа управления режимом работы двигателя может быть построена, например, сочетанием типовых направлений вращения с набором заданных отрезков пути, на которых необходимо обеспечить нужный режим работы двигателя 2.2.8. По результатам анализа информации, регистрируемой ВИС на реальном газопроводе, поворот инспектирующего снаряда вокруг продольной оси на 360 градусов происходит приблизительно на дистанции около 300 метров. Направление вращения двигателя может быть по часовой стрелке, против часовой стрелки, отсутствие вращения. Комбинацией числовых значений отрезков пути и логических значений режима работы двигателя 2.2.8 можно формировать различные режимы испытаний:
Весь путь может быть пройден подвижным устройством без вращения испытуемой инерциальной системы, весь путь может быть пройден при вращении испытуемой системы по часовой стрелке, весь путь может быть пройден при вращении испытуемой инерциальной системы против часовой стрелки, часть пути может быть пройдена при вращении системы по часовой стрелке, а вторая часть - с вращением против часовой стрелки, часть пути может быть пройдена без вращения, затем с вращением по часовой стрелке, затем без вращения, а потом с вращением против часовой стрелки и т.д.
Комбинации выбираются до начала испытаний и вводятся испытателем в контроллер 2.2.17 с переносного компьютера 2.5 (фиг.1). Работа на трассе начинается с установки подвижного объекта 2 на стартовой позиции (пункт Старт), отстоящей на несколько метров от первого маркера 3s. Включаются все маркеры. Включается питание контроллера 2.2.17 и испытуемой инерциальной системы. Контроллер 2.2.17 выдерживает время около 5 минут и выдает звуковой сигнал о возможности начала движения. Выдержка около 5 минут имитирует заполнение газом камеры запуска реального газопровода, в которой реально будет находиться внутритрубный инспектирующий снаряд с инерциальной системой на его борту. Практически за это время давление в камере запуска сравняется с давлением в магистральной трубе и возможно открытие отсечного крана для выталкивания ВИС из камеры запуска в линейную часть трубопровода. По звуковому сигналу от контроллера 2.2.17 начинается перемещение подвижного объекта 2.
В процессе движения подвижный объект 2 приближается к первому маркеру 3s. Катушка 3.1 маркера формирует переменное магнитное поле. Его силовые линии пересекают витки катушки 2.5, установленной на подвижном объекте. В катушке 2.5 наводится электродвижущая сила переменного тока, амплитуда которой нарастает по мере приближения подвижного объекта 2 к маркеру 3s и убывает при удалении подвижного объекта 2 от маркера 3. ЭДС с выводов катушки 2.5 (фиг.3) поступает на соответствующие входы регистратора испытуемой инерциальной системы и регистрируется в памяти регистратора вместе с данными о пути, проходимом подвижным объектом 2. Путевые данные формируются в регистраторе испытуемой системы при обработке сигналов одометра 2.7. Контроллер 2.2.17 обрабатывает сигналы одометра 2.7 и в соответствии с хранимой в нем программой формирует необходимые сигналы для управления работой электродвигателя 2.8. Вал электродвигателя 2.8 через редуктор 2.9 связан с валом 2.2.5, с которым жестко соединен держатель 2.2.7 и планки 2.2.11 вращающего устройства (фиг.3). Это обеспечивает при вращении вала электродвигателя 2.2.8 вращение испытуемой системы 2.3, удерживаемой во вращающем устройстве планками 2.2.11 и держателями 2.2.6 и 2.2.7. Импульсные сигналы одометра 2.7 усиливаются в контроллере 2.2.17 и поступают в соленоид 2.2.10в. Импульсы тока из контроллера 2.2.17 возбуждают импульсы магнитного поля соленоида 2.2.10в, которое действует на датчик Холла 2.2.10а, размещенный на центральной оси соленоида 2.2.10в. Датчик Холла вращается вместе с немагнитной осью 2.2.4, с которой соединен держатель 2.2.6а и, следовательно, корпус испытуемой системы 2.3. Так как ось чувствительности датчика Холла 2.2.10а совпадает с осью неподвижного соленоида 2.2.10в, то вращение датчика Холла не сказывается на форме сигнала, формируемого датчиком Холла 2.2.10а. В испытуемую систему 2.3 при любом ее вращении будут поступать импульсные сигналы одометра 2.7 через вращающееся электромагнитное сочленение 2.2.10а-2.2.10в. В процессе испытаний испытуемая система будет получать как сигналы от маркеров, так и сигналы одометра 2.7. Это обеспечивает привязку положения сигнала маркера в записи к конкретной дистанции на трассе и при анализе позволяет определить ошибку несовпадения фактического положения маркера с тем, что определилось по показаниям ИНС.
По мере перемещения по трассе подвижный объект 2 будет проходить мимо каждого из размещенных на трассе маркеров 3 и при этом будут регистрироваться в памяти испытуемой инерциальной системы электромагнитные сигналы соответствующих маркеров 3. Контроллер в соответствии с заложенной программой включает и отключает вращение электродвигателя 2.8 (фиг.3). Соответственно испытуемая система 2.3 вращается вокруг продольной оси в запрограммированную для данного участка пути сторону. Подвижный объект 2 (фиг.1), проходя трассу, следует всем ее искривлениям в плане и в вертикальной плоскости, что преобразуется инерциальными датчиками инерциальной системы в электрические сигналы, которые регистрируются в памяти испытуемой инерциальной системы 2.3. В процессе движения подвижный объект может следовать с линейной скоростью, соответствующей пределам, оговариваемым техническими характеристиками системы, но при необходимости могут быть проведены испытания поведения системы при закритических параметрах движения, например, с предельными угловыми и линейными скоростями.
На конечном участке трассы (фиг.1) подвижный объект 2 проходит мимо последнего маркера 3f и останавливается через несколько метров после него (пункт Финиш), что имитирует вхождение ВИС в приемную камеру магистрального трубопровода. В этот момент проводящим испытание оператором включается имитатор реле давления внутритрубного инспектирующего снаряда (на схемах не показан), сигнал которого обрабатывает программа ИНС. Этот сигнал реле давления соответствует снижению давления газа в приемной камере. По истечении 3-5 минут срабатывает устройство отключения питания в испытуемой инерциальной системе. Этим завершается тестирование на трассе. Переносный компьютер 5 стыкуется соответствующими интерфейсными соединителями с испытуемой инерциальной системой 2.3, и вся зарегистрированная информация перегружается из ее памяти в память переносного компьютера 5. В процессе анализа зарегистрированной инерциальной системой 2.3 информации оператор задает интерпретирующей программе номера маркеров, координаты которых будут использоваться в качестве корректирующих, для компенсации ошибок ИНС. Например нечетные маркеры 1, 3, 5 и так далее выбираются в качестве источников корректирующих данных. Координаты маркеров, расположенных между корректирующими, например, 2, 4, 6 и т.д., используются в качестве образцовых для определения погрешности системы на участках трассы между точками коррекции.
Комплекс для полунатурных испытаний инерциальных навигационных систем внутритрубных инспектирующих снарядов, состоящий из испытательной трассы, подвижного средства, снабженного одометром, приемной аппаратуры спутниковой навигационной системы GPS или ГЛОНАСС, отличающийся тем, что в него введены устройство для вращения испытуемой инерциальной навигационной системы вокруг продольной оси, программируемый контроллер управления направлением вращения вала вращающего устройства, вращающийся соединитель электрической сигнальной цепи, катушка индуктивности для приема сигналов маркерных устройств, группа маркерных устройств, причем в качестве подвижного устройства используется двухколесный с продольным размещением колес велосипед или мотороллер, при этом корпус испытуемой бескарданной инерциальной навигационной системы с источником питания крепится на осях вращающего устройства, которое размещается над задним колесом подвижного объекта, к заднему колесу которого прижато колесо одометра, выходные электрические цепи датчиков которого соединены с соответствующими входными цепями программируемого контроллера управления направлением вращения вала вращающего устройства, соответствующие выходы программируемого контроллера управления направлением вращения вала вращающего устройства соединены с входными цепями вращающегося соединителя электрической сигнальной цепи, выходы которого соединены со входом испытуемой инерциальной навигационной системы, предназначенным для ввода сигналов пути, входы приемника сигналов маркера которой соединены с выводами катушки индуктивности, установленной на корпусе вращающего устройства соосно с ним, а выводы управления электродвигателем вращающего устройства соединены с соответствующими выходами контроллера управления направлением вращения вала вращающего устройства, при этом маркерное устройство выполнено в виде немагнитной вешки, на вершине которой укреплена катушка индуктивности, выводы которой соединены с выходом низкочастотного генератора переменного тока, цепи питания которого соединены с гальванической батареей, при этом маркерные устройства установлены на некоторой дистанции одно от другого, вдоль трассы, имитирующей трассу трубопровода так, чтобы ось катушки индуктивности маркерного устройства была направлена параллельно направлению дороги, имитирующей трассу трубопровода, при этом пространственные координаты маркерного устройства определяются с помощью дифференциальной спутниковой навигационной системы, а трасса, имитирующая трубопровод, выполнена в виде узкого путепровода (тропы) или в виде проселочной дороги.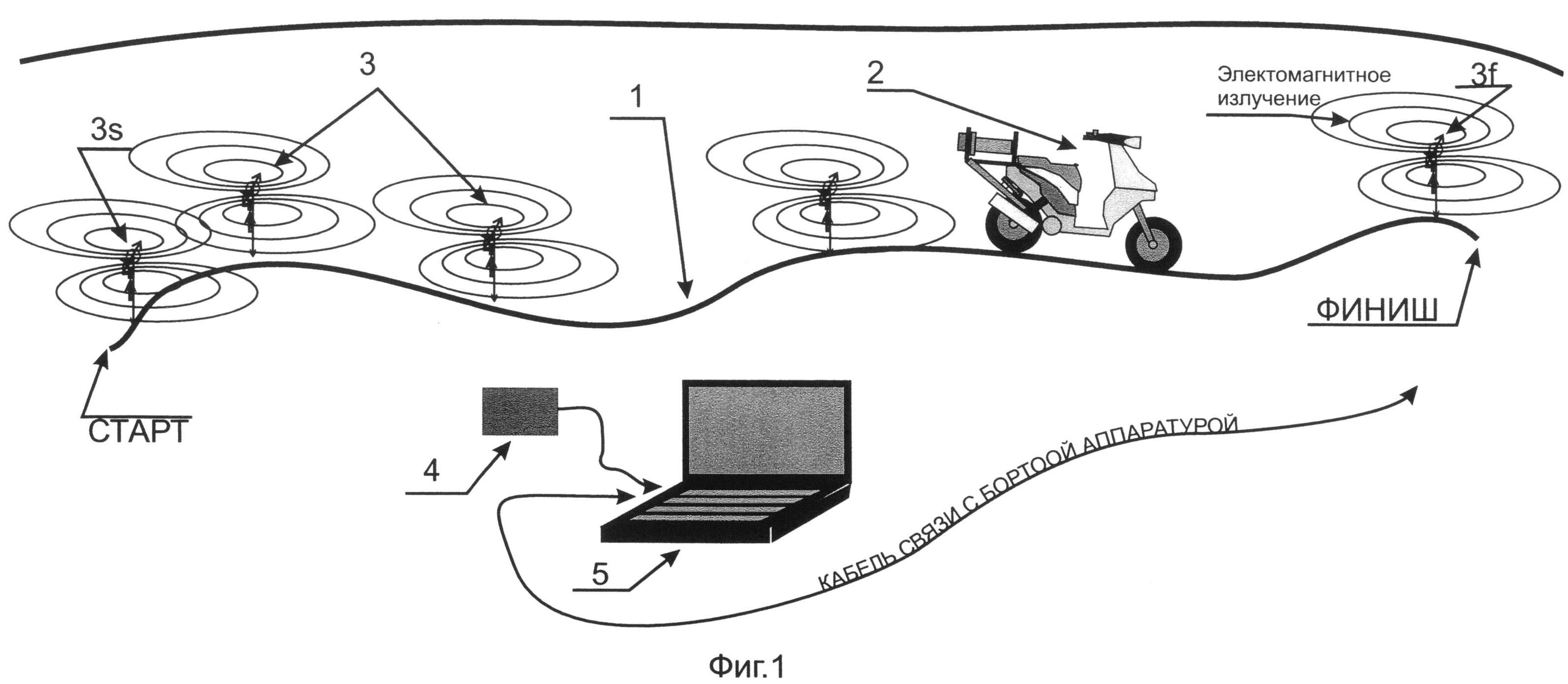
Комплекс дефектоскопии технологических трубопроводов
Способ восстановления несущей способности трубопровода
Регулятор скорости перемещения внутритрубных инспектирующих снарядов
Наружный сканирующий дефектоскоп
Внутритрубный профилометр
Способ осушки полости газопровода в условиях отрицательных температур
Комплекс внутритрубной дефектоскопии с тросовой протяжкой
Комплекс дефектоскопии технологических трубопроводов
Способ восстановления несущей способности трубопровода
Регулятор скорости перемещения внутритрубных инспектирующих снарядов
Наружный сканирующий дефектоскоп
Внутритрубный профилометр
Способ осушки полости газопровода в условиях отрицательных температур
Комплекс внутритрубной дефектоскопии с тросовой протяжкой
Устройство для намагничивания стенок труб действующих трубопроводов
Внутритрубный дефектоскоп
Способ гидравлического испытания на удар и реабилитации трубопровода, осуществляемый при его нагружении повышенным давлением в полевых условиях

