Результат интеллектуальной деятельности: КАЛИБРОВКА ГИРОСКОПИЧЕСКИХ СИСТЕМ С ВИБРАЦИОННЫМИ ГИРОСКОПАМИ
Вид РИД
Изобретение
Настоящее изобретение относится к гироскопическим системам, например, инерционным навигационным блокам, и, в частности, к гироскопическим системам, которые основаны на использовании вибрационных гироскопов.
Инерционный блок представляет собой точный навигационный прибор, который содержит, в частности, гироскопы, позволяющие обеспечивать навигационную информацию для носителей, например, кораблей, летательных аппаратов, ракет и космических кораблей любого типа.
Уровень точности, необходимый для измерений, обеспечиваемых гироскопами, используемыми в этих инерционных блоках, зависит от типа рассматриваемого инерциального блока. Некоторые блоки, например, бесплатформенные инерционные навигационные системы, т.е. навигационные блоки, в которых гироскопы привязаны к конструкции носителя, требуют, чтобы уровень точности измерения, обеспечиваемого гироскопами, был выше, чем в блоках других типов.
Чтобы бесплатформенная инерционная навигационная система была способна обеспечивать точные и надежные измерения, обычно используются лазерные гироскопы, поскольку они имеют высококачественный масштабный коэффициент. Однако гироскопы этого типа дороги.
Поэтому полезно иметь возможность заменить их менее дорогими гироскопами, например, вибрационными гироскопами типа HRG ('полусферический резонансный гироскоп').
Осесимметричный вибрационный гироскоп (эти гироскопы I типа соответствуют осесимметричным гироскопам типа кориолисова вибрационного гироскопа (CVG), например, типа полусферического резонансного гироскопа (HRG), описанным в документе Andrei M. Shkel 'Type I and Type II micromachined vibratory gyroscopes', стр. 586-593, IEEE/ION (Institute of Electrical and Electronics Engineers / Institute Of Navigation' PLANS 2006, San Diego, CA, USA)) можно использовать либо в режиме полного угла, в котором его вибрационная позиция свободна, либо в режиме стабилизации по угловой скорости, в котором его вибрационная позиция фиксирована и поддерживается за счет применения электрической команды, причем обеспечиваемые значения измерения выводятся из применяемой электрической команды, а также из значения масштабного коэффициента, связанного с используемым(и) вибрационным(и) гироскопом(ами).
Под термином 'масштабный коэффициент' здесь подразумевается коэффициент между вращением вибрационной волны вибрационного гироскопа и вращением опоры вибрационного гироскопа, т.е. отношение, относящееся к возбуждению вращения вибрационной волны гироскопа механическим вращением опоры гироскопа. Теоретически, этот масштабный коэффициент для данного вибрационного гироскопа имеет постоянное значение, которое может соответствовать номинальному значению, связанному с рассматриваемым гироскопом.
Кроме того, такой гироскоп, используемый в режиме полного угла, имеет ошибку смещения, значение которой зависит от вибрационной позиции по отношению к корпусу.
Таким образом, значения измерения, обеспечиваемые таким вибрационным гироскопом, могут ухудшаться за счет некоторых ошибок, относящихся к изменениям смещения, поскольку значение смещения зависит от вибрационной позиции и, стало быть, от изменений ориентации носителя.
Также следует отметить, что использование такого вибрационного гироскопа в режиме полного угла дает возможность обеспечивать значения измерения с достаточно малыми ошибками, связанными с масштабным коэффициентом. С другой стороны, в этом режиме значения измерения, которые являются значениями угла, обеспечиваемые вибрационным гироскопом, ухудшаются за счет шума, известного как 'угловой шум'.
Во избежание этого переменного смещения, а также этого углового шума, вибрационный гироскоп можно использовать в режиме угловой скорости.
Однако такой режим работы может значительно снижать уровень качества измерения, поскольку в этом случае возникают ошибки, связанные с масштабным коэффициентом. Поэтому, в таком режиме работы, эти вибрационные гироскопы не могут удовлетворять критериям качества, необходимым, в частности, для бесплатформенной инерционной системы.
Настоящее изобретение призвано исправить эту ситуацию.
Задачей настоящего изобретения является использование вибрационных гироскопов типа HRG в инерционных навигационных системах, которые требуют высокого уровня точности в режиме угловой скорости. В таком режиме работы обеспечиваемые значения измерения не ухудшаются за счет переменного смещения и углового шума. Кроме того, полезно принимать меры по коррекции ошибки, связанной с масштабным коэффициентом, которая влияет на значения измерения гироскопа, работающего в этом режиме.
Первый аспект настоящего изобретения предусматривает способ калибровки гироскопа, подлежащего калибровке, в гироскопической системе, содержащей, по меньшей мере, четыре вибрационных гироскопа, способных изменять вибрационную позицию в пределах множества вибрационных позиций;
причем первое измерение обеспечивают упомянутым вибрационным гироскопом, подлежащим калибровке, и второе измерение обеспечивают комбинацией соответствующих измерений от других вибрационных гироскопов системы, причем первое и второе измерения осуществляют по одной и той же оси измерения;
способ калибровки содержит, на уровне вибрационного гироскопа, подлежащего калибровке, этапы, на которых:
/1/ применяют к гироскопу, подлежащему калибровке, в течение периода времени, начальную команду для изменения вибрационной позиции из первой вибрационной позиции во вторую вибрационную позицию; и
/2/ определяют калиброванное значение масштабного коэффициента вибрационного гироскопа, подлежащего калибровке, на основании значения, вычисленного в связи с этапом /1/, на основании периода времени, в течение которого применяется начальная команда, начальной команды, разности углов между первой и второй вибрационными позициями, измеренной согласно первому измерению, и разности углов, измеренной в течение периода изменения вибрационной позиции гироскопа, подлежащего калибровке, согласно второму измерению. В частности, при этом можно принимать меры по определению команды для изменения вибрационной позиции на основании номинального масштабного коэффициента, теоретически известного для этого вибрационного гироскопа, проходящего калибровку.
Для этого такая гироскопическая система содержит по меньшей мере четыре вибрационных гироскопа, которые размещены таким образом, что любой из этих вибрационных гироскопов, в качестве первого средства измерения, может обеспечивать измерение по той же оси измерения, что и комбинация других вибрационных гироскопов, рассматриваемая как второе средство измерения.
Этот способ калибровки можно выгодно применять для калибровки масштабного коэффициента гироскопа в режиме угловой скорости, причем режим угловой скорости позволяет не ухудшать значения измерения за счет переменного смещения и углового шума.
Такая конфигурация позволяет определять значение масштабного коэффициента гироскопа. Здесь мы имеем, с одной стороны, разность углов θ2-θ1 или значение углового перемещения, между первой вибрационной позицией, обозначенной θ1, и второй вибрационной позицией, обозначенной θ2, измеренной вибрационным гироскопом согласно первому измерению, и, с другой стороны, применяемую команду изменения позиции и время ее применения. Однако, когда рассматриваемая гироскопическая система находится на мобильном носителе, значение углового перемещения, измеренное вибрационным гироскопом, проходящим калибровку, указывает сумму значения углового перемещения, предписанного согласно применению команды, и значения углового перемещения вследствие движения носителя.
Здесь, преимущественно, также предпринимаются меры по учету второго измерения для внесения поправки в первое измерение на любое движение носителя гироскопической системы. Таким образом, второе измерение используется как опорное измерение для определения, на основании первого измерения от гироскопа, значения углового перемещения, которое измеряется вибрационным гироскопом и которое связано только с применением команды прецессии.
Поэтому следует отметить, что второе измерение преимущественно дает возможность корректировать значение углового перемещения, измеренное вибрационным гироскопом, проходящим калибровку в случае, когда опора гироскопической системы сама перемещается, для получения значения углового перемещения, связанного только с командой прецессии, измеренного вибрационным гироскопом, подлежащим калибровке.
Таким образом, калибровка согласно варианту осуществления настоящего изобретения может производиться даже, когда гироскопическая система находится на мобильном носителе. Эта преимущественная характеристика основана на том факте, что в рассматриваемой гироскопической системе существует по меньшей мере четыре вибрационных гироскопа, что позволяет получить второе измерение по той же оси, что и первое измерение, обеспечиваемое гироскопом, проходящим калибровку.
При этом калиброванное значение масштабного коэффициента можно выводить из значения углового перемещения между первой и второй вибрационными позициями, измеренного гироскопом, и корректировать в отношении любого движения гироскопической системы, в соответствии со значением команды.
Это позволяет начинать с необязательной корректировки первого измерения значения углового перемещения между первой и второй угловыми позициями посредством второго измерения для вычитания из него любого движения носителя гироскопической системы. Это значение углового перемещения, скорректированное первым измерением, прибавляется к длительности периода времени, в течение которого применяется команда, и этот результат делится на количество вольт, представленных применяемой командой.
Масштабный коэффициент можно выражать, например, в градусах в час на вольт.
Когда этот вибрационный гироскоп работает в режиме угловой скорости, обеспечиваемые им значения измерения не ухудшаются, за счет углового шума, но они могут иметь уровень качества масштабного коэффициента, не соответствующий гироскопической системе, в которой применяется этот вибрационный гироскоп. Осуществление такого способа дает возможность повысить точность калибровки в отношении значения масштабного коэффициента и, таким образом, получить вибрационный гироскоп, обеспечивающий высококачественные измерения.
Согласно варианту осуществления настоящего изобретения, способ калибровки также содержит, между этапом /1/ и этапом /2/, этап, на котором:
/1-a/ применяют, в течение периода времени, вторую команду, способную предписывать изменение вибрационной позиции из второй вибрационной позиции в первую вибрационную позицию; и
на этапе /2/ калиброванное значение масштабного коэффициента вибрационного гироскопа, подлежащего калибровке, определяют путем вычисления среднего между, с одной стороны, значением, вычисленным в связи с этапом /1/, и, с другой стороны, значением, вычисленным в связи с этапом /1-a/, на основании периода времени, в течение которого применяется вторая команда, второй команды, разности углов между второй и первой вибрационными позициями, измеренной согласно первому измерению, и разности углов между второй и первой вибрационными позициями, измеренной согласно второму измерению.
Калиброванное значение масштабного коэффициента может дополнительно ухудшаться за счет ошибки из-за ухода гироскопа, которая влияет на измерения, производимые вибрационным гироскопом, подлежащим калибровке. Ошибка из-за ухода всегда имеет один и тот же знак, когда вибрационная позиция вращается в одном направлении. Когда применяемая команда, или команда прецессии, применяется в одном случае в одном направлении, затем, в другом случае, в противоположном направлении, ошибка из-за ухода прибавляется к команде прецессии в одном случае и вычитается в другом случае.
Вследствие этих характеристик, мы имеем два значения, вычисленные для масштабного коэффициента, полученные, соответственно, путем применения двух команд в противоположных направлениях. В результате, первая и вторая ошибки из-за ухода, влияющие на первое и второе вычисленные значения масштабных коэффициентов, определенных в первой и второй вибрационных позициях, соответственно, имеют соответствующие противоположные знаки. Вычисление среднего двух полученных таким образом калиброванных значений масштабного коэффициента дает выгодную возможность скомпенсировать ошибку из-за ухода, которая может ухудшить каждое из соответствующих вычисленных значений масштабных коэффициентов.
Согласно варианту осуществления настоящего изобретения способ калибровки также содержит, между этапом /1/ и этапом /2/, этапы, на которых:
/1-a/ применяют, в течение периода времени, вторую команду, способную предписывать изменение вибрационной позиции из второй вибрационной позиции в первую вибрационную позицию; и
/1-b/ применяют, в течение периода времени, третью команду, способную предписывать изменение вибрационной позиции из первой вибрационной позиции в третью вибрационную позицию; и
в котором на этапе /2/ калиброванное значение масштабного коэффициента вибрационного гироскопа, подлежащего калибровке, определяется путем вычисления среднего между, с одной стороны, значением, вычисленным в связи с этапом /1/, и, с другой стороны, значением, вычисленным в связи с этапом /1-b/, на основании периода времени, в течение которого применяется третья команда, третьей команды, разности углов между первой и третьей вибрационными позициями, измеренной согласно первому измерению, и разности углов между первой и третьей вибрационными позициями, измеренной согласно второму измерению.
Это позволяет находить среднее между двумя калиброванными значениями масштабного коэффициента, определенными в вибрационных позициях, расположенных вокруг первой вибрационной позиции, которая может преимущественно соответствовать обычной рабочей точке вибрационного гироскопа.
Можно сделать так, чтобы вторая и третья вибрационные позиции располагались под углом 90 градусов с одной и другой стороны, соответственно, первой вибрационной позиции.
Можно предположить, что ошибка, влияющая на масштабный коэффициент, изменяется как функция вибрационной позиции, по существу, согласно гармонике второго порядка. В результате, было бы удобно, чтобы калиброванные значения масштабного коэффициента для вибрационных позиций отличались на 180 градусов, поскольку при вычислении среднего этих значений получается более точное калиброванное значение масштабного коэффициента.
При определении калиброванного значения масштабного коэффициента вибрационного гироскопа, подлежащего калибровке, было бы выгодно также учитывать значение ошибки из-за ухода гироскопа, которую можно вычислить по завершении этапа 1-a.
Согласно варианту осуществления настоящего изобретения способ калибровки также содержит этап, на котором:
- повторяют K раз этапы /1/, /1-a/ и /1-b/, причем в ходе каждой повторной итерации вторая и третья вибрационные позиции, соответственно, отличаются от второй и третьей вибрационных позиций на этапах предыдущей итерации, где K - целое число;
причем калиброванное значение масштабного коэффициента определяют для каждой повторной итерации, соответственно, путем вычисления среднего значений, вычисленных в связи с этапами /1/ и /1-b/ каждой итерации.
Ошибка, влияющая на масштабный коэффициент, может зависеть от вибрационной позиции вибрационного гироскопа. Продолжая таким образом, можно построить модель изменения ошибки, влияющей на масштабный коэффициент, в зависимости от вибрационной позиции вибрационного гироскопа. Таким образом, точность калибровки вибрационного гироскопа повышается.
Для получения надежных измерений, было бы выгодно, чтобы, при осуществлении этапов, гироскопическая система обеспечивала гироскопические измерения на основании значений измерения, обеспечиваемых вторым средством измерения.
Такой способ, согласно варианту осуществления настоящего изобретения, дает возможность легко корректировать ошибки, связанные с масштабным коэффициентом, которые влияют на значения измерения вибрационного гироскопа в режиме угловой скорости. В случае, когда вибрационный гироскоп используется в режиме угловой скорости, эти значения измерения не нарушаются угловым шумом, как объяснено выше. В результате, можно добиться высокого уровня качества и точности для значений измерения, обеспечиваемых таким вибрационным гироскопом. Можно регулировать значение K в зависимости от точности желаемых значений измерения.
При осуществлении этих этапов на одном из вибрационных гироскопов рассматриваемой гироскопической системы, было бы выгодно заменять значения измерения, обеспечиваемые последним и учитываемые гироскопической системой для обеспечения навигационной информации, значениями измерения, обеспечиваемыми вторым средством измерения.
В этом контексте появляется возможность временно возмущать один из вибрационных гироскопов для получения дополнительной информации о нем с целью коррекции обеспечиваемых им значений измерения в первой вибрационной позиции, в то же время, позволяя гироскопической системе продолжать надежно работать. В результате, появляется возможность выполнять этапы способа на одном из N вибрационных гироскопов в ходе обычной эксплуатации гироскопической системы.
Таким образом, даже в случае, когда корректируемая здесь ошибка изменяется со временем, можно легко применять надлежащую коррекцию этой ошибки, осуществляя через равные промежутки времени этапы способа согласно варианту осуществления настоящего изобретения.
В рассматриваемой здесь гироскопической системе, три гироскопа могут быть ортогональными, и четвертый может располагаться на трисектрисе трех ортогональных гироскопов.
Второй аспект настоящего изобретения предусматривает гироскопическую систему, пригодную для осуществления способа калибровки согласно первому аспекту настоящего изобретения.
Другие характеристики и преимущества изобретения явствуют из нижеследующего описания. Последнее приведено исключительно в целях иллюстрации, со ссылками на прилагаемые чертежи, в которых:
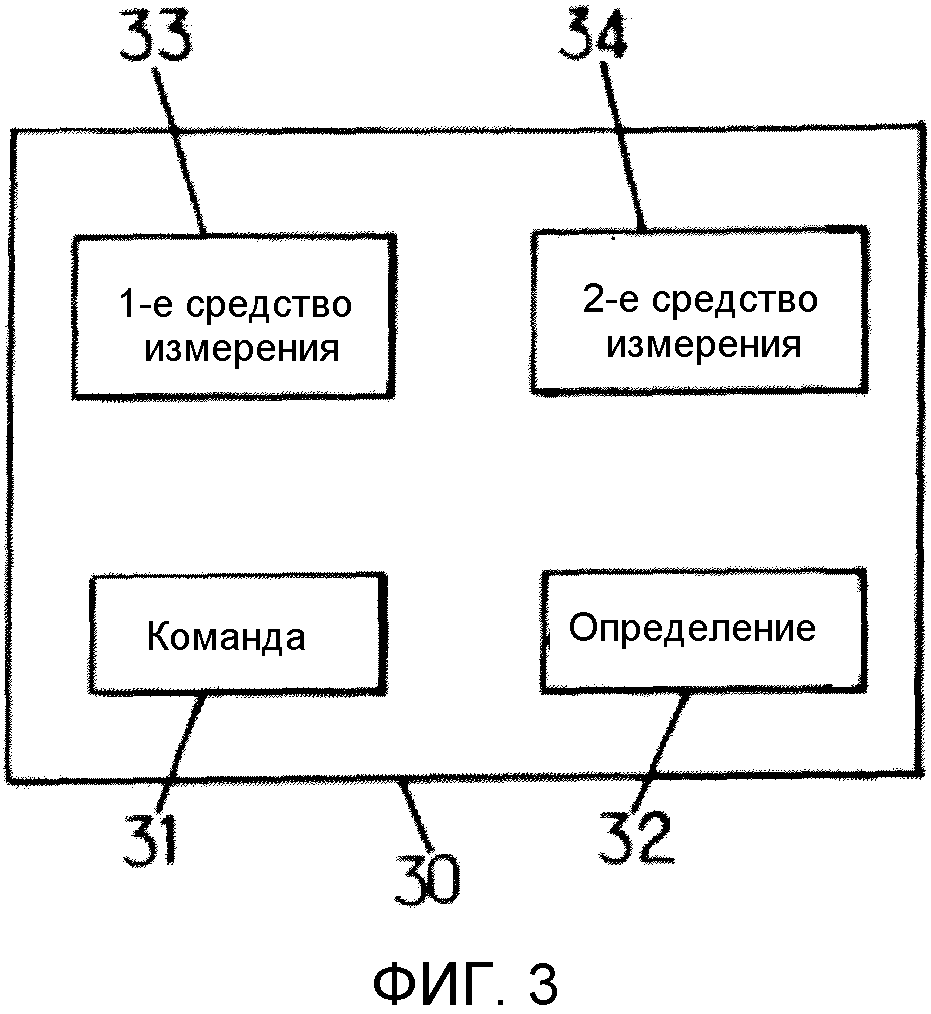
Фиг. 1 - основные этапы способа калибровки в гироскопической системе согласно варианту осуществления настоящего изобретения.
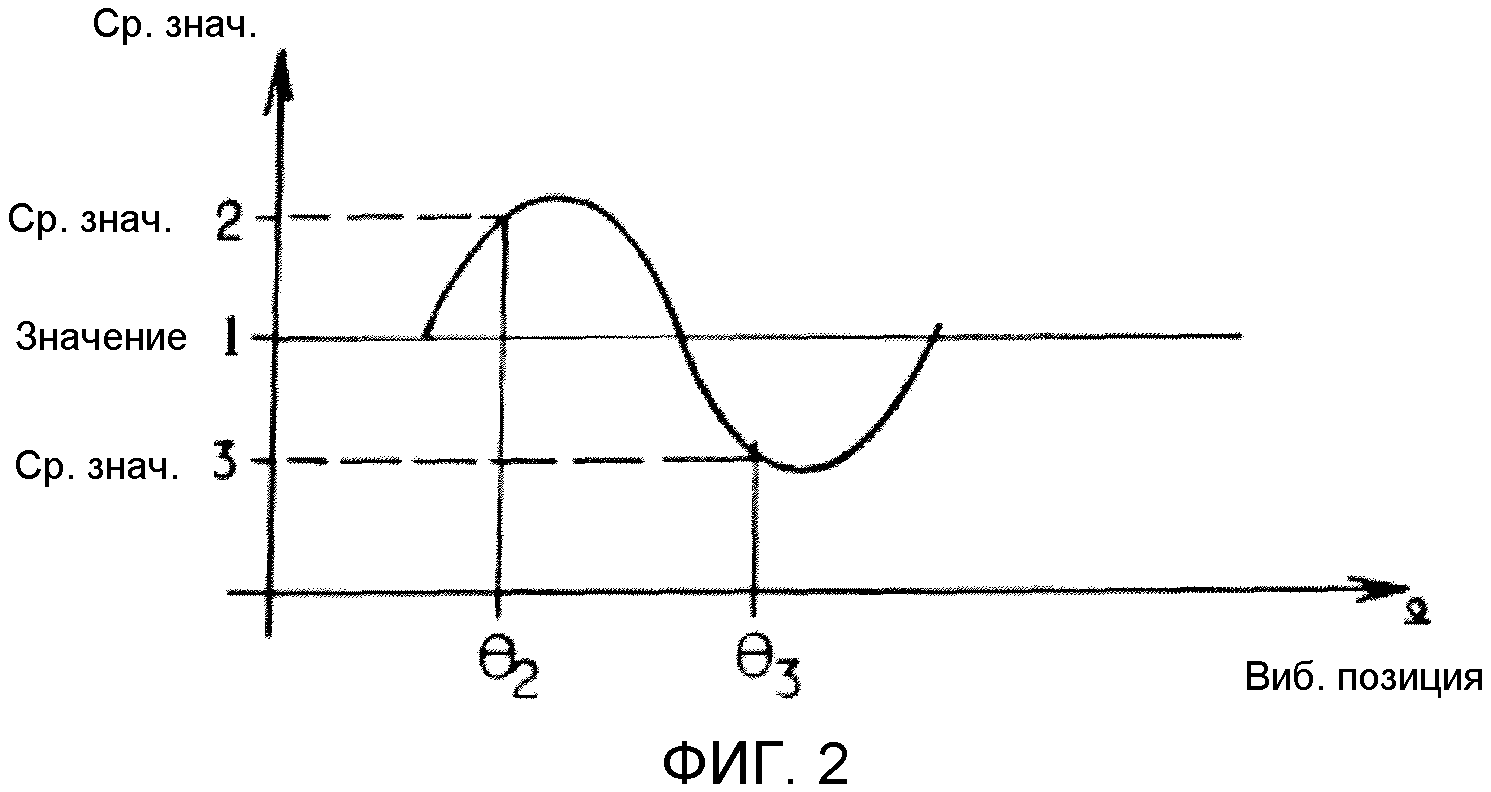
Фиг. 2 - изменения значений ошибки, влияющей на масштабный коэффициент вибрационного гироскопа.
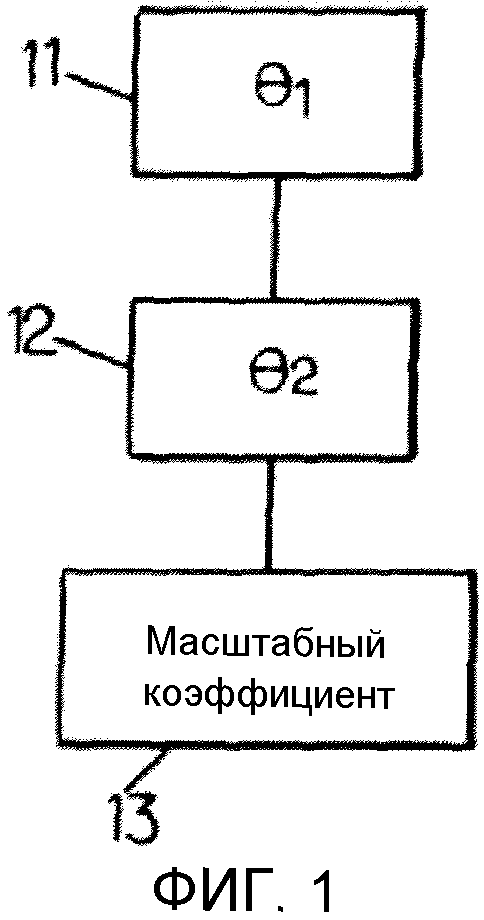
Фиг. 3 - гироскопическая система согласно варианту осуществления настоящего изобретения.
В дальнейшем настоящее изобретение описано применительно к гироскопам I типа. Эти гироскопы I типа соответствуют осесимметричным гироскопам типа кориолисова вибрационного гироскопа (CVG), например, типа полусферического резонансного гироскопа (HRG), описанным в документе Andrei M. Shkel 'Type I and Type II micromachined vibratory gyroscopes', стр. 586-593, IEEE/ION (Institute of Electrical and Electronics Engineers/Institute Of Navigation' PLANS 2006, San Diego, CA, USA).
Эти гироскопы могут действовать в разомкнутом цикле, т.е. в режиме полного угла. Таким образом, они позволяют измерять абсолютный угол поворота на основании измерения угла, представляющего вибрационную позицию гироскопа по отношению к измерительным электродам.
Такой гироскоп также можно использовать в замкнутом цикле, управляя вибрационной позицией посредством электрической команды, так называемой команды прецессии, описанной, в частности, в документе FR 2 755 227. В этом случае поддерживается фиксированная вибрационная позиция гироскопа, и измерение выводится из команды, которую необходимо применять к гироскопу для поддержания его в этой фиксированной вибрационной позиции. Этот тип работы называется режимом "угловой скорости". Значения, обеспечиваемые физическим измерением, соответствуют скорости вращения.
На фиг. 1 показаны основные этапы способа калибровки в гироскопической системе согласно варианту осуществления настоящего изобретения.
Гироскопическая система, в которой применяется способ калибровки, содержит по меньшей мере четыре вибрационных гироскопа, которые размещены таким образом, что ось измерения одного из этих вибрационных гироскопов совпадает с осью измерения комбинации измерений, обеспечиваемых другими вибрационными гироскопами системы. Значения измерения, которые они обеспечивают, могут ухудшаться за счет ошибки, связанной с масштабным коэффициентом, в режиме угловой скорости низкого качества. Вариант осуществления настоящего изобретения предусматривает вышеописанную коррекцию такого рода ошибки в гироскопической системе.
Вибрационный гироскоп, подлежащий калибровке, в отношении которого применяются этапы /1/-/2/, именуется ниже 'первым средством измерения', которое обеспечивает первое измерение, и совокупность других вибрационных гироскопов именуется 'вторым средством измерения', которое обеспечивает второе измерение. В рассматриваемой здесь гироскопической системе можно предположить, что, в обычном режиме работы, навигационная информация, обеспечиваемая гироскопической системой, получается из значений измерения, обеспечиваемых по меньшей мере тремя другими вибрационными гироскопами системы. В этом случае, предпочтительно, вибрационный гироскоп первого средства измерения, т.е. гироскоп, проходящий калибровку, не обеспечивает значения измерения, которые рассматриваются системой в обычном режиме работы.
В гироскопической системе согласно варианту осуществления настоящего изобретения, содержащей число N вибрационных гироскопов, где N - целое число, большее или равное 4, можно предусмотреть калибровку каждого из этих гироскопов по очереди, согласно способу калибровки настоящего изобретения.
После применения этапов /1/ и /2/ ко всем вибрационным гироскопам, которые, предположительно, используются в обычном режиме работы гироскопической системы, система получает возможность обеспечивать эффективную навигационную информацию на основании этих гироскопов, поскольку значения измерения, соответственно, обеспечиваемые ими, затем корректируются согласно варианту осуществления настоящего изобретения. Один из гироскопов может быть дополнительным вибрационным гироскопом, который не используется в обычном режиме работы системы. Это дает возможность обеспечивать, совместно с другими гироскопами системы, второе измерение по той же оси, что и вибрационный гироскоп, проходящий калибровку, позволяя заменять вибрационный гироскоп в системе, при осуществлении этапов команды прецессии.
Вибрационный гироскоп, используемый в обычном режиме работы системы, должен поддерживаться в первой вибрационной позиции, например, для работы в режиме угловой скорости.
Для повышения производительности гироскопической системы согласно варианту осуществления настоящего изобретения, предлагается корректировать ошибку масштабного коэффициента, которая влияет на значения измерения, обеспечиваемые в первой вибрационной позиции вибрационного гироскопа.
На этапе 11 этот вибрационный гироскоп вибрирует в своей обычной вибрационной позиции θ1, которая является первой вибрационной позицией.
На этапе 12 предписывается изменение вибрационной позиции из первой вибрационной позиции во вторую вибрационную позицию θ2.
Затем мы имеем следующую информацию, применительно к описываемой гироскопической системе:
- применяемая команда, например, выраженная в вольтах;
- период времени, в течение которого применяется эта команда;
- разность углов между первой и второй вибрационными позициями согласно первому измерению и
- разность углов согласно второму измерению.
Заметим, что эта разность углов измеряется в течение периода изменения вибрационной позиции гироскопа, подлежащего калибровке.
На основании этих данных, на этапе 13, можно вычислить калиброванное значение масштабного коэффициента гироскопа, проходящего калибровку, даже если носитель гироскопической системы движется. Используя измерение из второго средства измерения, можно корректировать в первое измерение на любое движение носителя для окончательного выявления только углового перемещения между первой и второй вибрационными позициями, обусловленного исключительно применяемой командой прецессии.
Например, C обозначает команду в вольтах, применяемую в качестве команды прецессии к вибрационному гироскопу, которая здесь предполагается имеющей постоянное значение для облегчения представления примера. SF0 обозначает значение номинального масштабного коэффициента вибрационного гироскопа, подлежащего калибровке, выражаемого в °/ч/В, что позволяет выражать нужную скорость прецессии в вольтах. Затем, T обозначает период времени, в течение которого применяется команда прецессии C. В этом контексте можно определить команду прецессии C, применяемую к вибрационному гироскопу, подлежащему калибровке, согласно следующему уравнению, где θ2-θ1 соответствует нужной разности углов:

Новое значение SF1 масштабного коэффициента, полученное по завершении настоящей фазы калибровки, удовлетворяет следующему уравнению:

где (θ 2 -θ 1)measured соответствует разности углов, или угловому перемещению, между первой и второй вибрационными позициями, полученной на основании первого измерения, скорректированной в зависимости от второго измерения, для необязательного удаления разности углов, связанной с движением носителя.
Согласно варианту осуществления настоящего изобретения также предписывается изменение вибрационной позиции из второй вибрационной позиции обратно в первую вибрационную позицию. В этом случае получаются два отдельных значения, вычисленные в отношении двух этапов команды прецессии, причем первая команда позволяет переходить из первой вибрационной позиции во вторую, и вторая команда позволяет переходить из второй вибрационной позиции в первую вибрационную позицию. Это позволяет находить среднее этих двух вычисленных значений. Продолжая, таким образом, можно скомпенсировать первую и вторую ошибки из-за ухода, которые могут влиять на первое и второе вычисленные значения масштабного коэффициента.
На фиг. 2 показаны изменения значения синусоидальной ошибки, которая влияет на измерение от вибрационного гироскопа, работающего в режиме угловой скорости. По существу синусоидальная кривая представлена в положении, представляющем вибрационную позицию по оси x, и значение измерения флуктуирует в зависимости от рассматриваемой здесь ошибки по оси y.
Заметим, что значение ошибки, рассматриваемое в этом случае, имеет среднее значение нуль по всей окружности вибрационных позиций.
Можно предположить, что после предписания вернуться в первую вибрационную позицию θ1, предписывается следующий этап для поворота вибрационной позиции в третью позицию θ3, для обеспечения третьего значения измерения val3. Эта третья вибрационная позиция расположена, по существу, симметрично по отношению ко второй позиции по другую сторону от первой вибрационной позиции.
Таким образом, можно получить два вычисленных значения масштабных коэффициентов, первое вычисленное значение, которое относится к команде прецессии, применяемой для перехода из первой вибрационной позиции во вторую вибрационную позицию, и второе вычисленное значение, которое относится к команде прецессии, применяемой для перехода из первой вибрационной позиции в третью вибрационную позицию, на уровне вибрационного гироскопа, подлежащего калибровке.
При этом предусмотрено находить среднее этих двух вычисленных значений, в отношении вибрационных позиций, расположенных, по существу, симметрично с одной и другой стороны первой вибрационной позиции, которая может быть вибрационной позицией, где вибрационный гироскоп поддерживается для обеспечения его значений измерения в рассматриваемой гироскопической системе.
Какую бы вибрационную позицию ни считать первой, продолжая таким образом, можно определить соответствующее калиброванное значение масштабного коэффициента для калибровки этого вибрационного гироскопа в первой вибрационной позиции.
В случае, когда требуется повышение точности калиброванного значения масштабного коэффициента, можно повторять этапы команды для поворота вибрационной позиции, на одной стороне, затем на другой стороне, симметрично по отношению к первой вибрационной позиции, получая, при каждой новой итерации, вторую и третью вибрационные позиции, которые отличаются от тех, которые применялись в предыдущих итерациях.
Каждая итерация имеет соответствующее калиброванное значение масштабного коэффициента, полученное путем вычисления среднего двух значений, вычисленных для двух вибрационных позиций, симметричных по отношению к первой вибрационной позиции, соответствующей этой итерации. Эта итерация дает возможность точнее определить калиброванные значения масштабного коэффициента.
Здесь, разные калиброванные значения масштабного коэффициента, полученные при каждой итерации, можно суммировать для отыскания их среднего, путем деления результата сложения на количество итераций этих этапов.
На фиг. 3 показана гироскопическая система согласно варианту осуществления настоящего изобретения.
Эта гироскопическая система содержит первое средство измерения 33, т.е. вибрационный гироскоп, подлежащий калибровке, и второе средство измерения 34, т.е. совокупность N-1 других вибрационных гироскопов. Она также содержит:
- командный блок 31 для применения, в течение периода времени, начальной команды для изменения вибрационной позиции из первой вибрационной позиции во вторую вибрационную позицию; и
- блок 32 определения, способный определять калиброванное значение масштабного коэффициента вибрационного гироскопа, подлежащего калибровке, на основании значения, вычисленного в отношении начальной команды, на основании периода времени, в течение которого применяется команда, команды, разности углов между первой и второй вибрационными позициями, измеренной согласно первому измерению, и разности углов, измеренной согласно второму измерению.
Заметим, что эта последняя разность углов измеряется в течение периода изменения вибрационной позиции гироскопа, подлежащего калибровке. Кроме того, командный блок 31 может быть способен применять, в течение периода времени, вторую команду, способную предписывать изменение вибрационной позиции из второй вибрационной позиции в первую вибрационную позицию; и, кроме того, блок 32 определения может быть способен определять калиброванное значение масштабного коэффициента путем вычисления среднего между, с одной стороны, значением, вычисленным в связи с применяемой командой, и, с другой стороны, значением, вычисленным в отношении второй команды, на основании периода времени, в течение которого применяется вторая команда, второй команды, разности углов между второй и первой вибрационными позициями, измеренной согласно первому измерению, и разности углов между второй и первой вибрационными позициями, измеренной согласно второму измерению.
Согласно варианту осуществления настоящего изобретения, командный блок 31 способен применять, в течение периода времени, вторую команду, способную предписывать изменение вибрационной позиции из второй вибрационной позиции в первую вибрационную позицию; и применять, в течение периода времени, третью команду, способную предписывать изменение вибрационной позиции из первой вибрационной позиции в третью вибрационную позицию; и блок 32 определения дополнительно способен определять калиброванное значение масштабного коэффициента путем вычисления среднего между, с одной стороны, значением, вычисленным в связи с начальной командой, и, с другой стороны, значением, вычисленным в отношении третьей команды, на основании периода времени, в течение которого применяется третья команда, третьей команды, разности углов между первой и третьей вибрационными позициями, измеренной согласно первому измерению, и разности углов между первой и третьей вибрационными позициями, измеренной согласно второму измерению.
Вторая и третья вибрационные позиции могут располагаться под углом 90 градусов с одной и другой стороны первой вибрационной позиции соответственно.
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства

