Результат интеллектуальной деятельности: СПОСОБ ЗАХОДА САМОЛЕТА НА ПОСАДКУ В АВАРИЙНЫХ УСЛОВИЯХ (ВАРИАНТЫ)
Вид РИД
Изобретение
Изобретение относится к области систем управления летательными аппаратами и может быть использовано при решении задачи обеспечения захода самолета на посадку при аварийных ситуациях, связанных с отказом как штатных бортовых, так и наземных средств привода самолетов в точку начала снижения (ТНС).
Заход самолетов на посадку в общем случае состоит из ряда последовательных этапов: выход в точку начала снижения, снижение (пробивание облачности), посадка. Успешное завершение посадки во многом зависит от точности выхода самолета в ТНС. Часто способы, обеспечивающие выход самолетов в ТНС называют способами захода на посадку [Справочник летчика и штурмана. Под ред. засл. воен. штурмана СССР генерал-лейтенанта авиации М.В. Лавского. - М.: Воениздат, 1974 г, с.390]. Эффективность любых способов захода самолетов на посадку зависит от вида используемых бортовых и наземных средств обеспечения посадки и их работоспособности. Работоспособность последних может быть нарушена в результате отказов технических средств и их элементов, при чрезвычайных ситуациях (диверсии, стихийные бедствия, человеческий фактор и др.). Поэтому задача обеспечения захода самолета на посадку при аварийных ситуациях, связанных с отказом как штатных бортовых, так и наземных средств привода самолетов в ТНС является важнейшей задачей обеспечения безопасности полетов самолетов любых видов авиации. При этом задачи захода самолетов на посадку в случае отказов бортовых средств обеспечения посадки следует решать, в первую очередь, за счет использования другого штатного оборудования, способного заменить вышедшие из строя средства и обеспечить заход самолета на посадку. В военно-воздушных силах в качестве такого оборудования может использоваться станция предупреждения о радиолокационном облучении (СПО) самолета, устанавливаемая на все типы самолетов [Станция предупреждения о радиолокационном облучении, Интернет сайт ЦКБА http:// www.ckba.net /main.php? id=23].
Известен способ захода на посадку с рубежа начала снижения (РНС). без предварительного выхода на дальний приводной радиомаяк (ДПРМ) [Справочник летчика и штурмана. Под ред. засл. воен. штурмана СССР генерал-лейтенанта авиации М.В. Лавского. - М.: Воениздат, 1974 г, с.396-401]. Заход на посадку производится по командам наземного оператора. При этом используются предварительно построенные и нанесенные на прозрачном материале в масштабе индикатора кругового обзора радиолокационной станции (ИКО РЛС) сетки РНС для различных высот полета самолетов. Эти рубежи для каждой высоты полета строятся в виде дуг окружностей с центрами, совпадающими с центрами окружностей разворота на посадочный курс, а для контроля за правильностью выдерживания режима снижения и его корректировки - применяется палетка с глиссадами снижения в зависимости от значений вертикальных скоростей самолета. С использованием этих палеток и отметок от самолета на индикаторах РЛС оператор определяет курс захода на посадку, момент начала снижения и выдает соответствующие команды на борт самолета, а также контролирует их выполнение путем слежения за правильностью выполнения летчиком режима снижения и корректировки положения самолета на глиссаде снижения. Расчетная точка начала снижения выбирается таким образом, чтобы ее удаление от ДПРМ обеспечивало снижение с расчетной высоты до высоты прохода ДПРМ с учетом двух горизонтальных площадок на этих высотах по 30 с и исправления возможных ошибок по направлению при выходе в створ взлетно-посадочной полосы (ВПП).
Недостатком этого способа захода на посадку является то, что при выходе из строя (отказе), повреждении или уничтожении наземных РЛС аэродрома или его средств радиосвязи (или бортовых средств радиосвязи самолета) он не может быть реализован.
Наиболее близким по сущности и достигаемому эффекту является способ захода на посадку с предварительным выходом самолета на ДПРМ и последующим отворотом на расчетный угол [Справочник летчика и штурмана. Под ред. засл. воен. штурмана СССР генерал-лейтенанта авиации М.В. Лавского. - М.: Воениздат, 1974 г, с.390-393]. Способ используется при заходах самолетов на посадку днем в сложных метеорологических условиях и ночью с курсами, близкими или противоположными к направлению взлетно-посадочной полосы. После прохода ДПРМ самолетом берется курс, обратный посадочному, с поправкой на угол отворота с таким расчетом, чтобы по истечении заданного времени самолет вышел в точку разворота на такой угол, при котором самолет после завершения разворота оказался бы в точке начала снижения, лежащей в створе ВПП (в плоскости, проходящей через продольную ось ВПП). Затем самолет осуществляет снижение, последовательно проходя над ДПРМ и ближним приводным радиомаяком (БПРМ), и завершает посадку касанием ВПП. Для определения курсового угла ДПРМ (расчетного угла отворота) используются средневолновые бортовые автоматические радиокомпасы (АРК) [Микоян С.А., Корбут А.Г. Заход на посадку по приборам, М.: Воениздат, 1979. - 71 с, ил., с.64], работающие в диапазоне частот 150-1750 кГц [Интернет сайт Википедия http://ru.wikipedia.org/wiki/%D0%E0%E4%E8%EE%EA%EE%EC%EF%E0F1]. Этот способ принят в дальнейшем за прототип.
Основным недостатком этого способа является то, что его невозможно выполнить при отказах бортового АРК или выхода из строя оборудования наземного ДПРМ. Кроме того, данный способ посадки невозможно реализовать на запасных полевых аэродромах, где отсутствуют радиотехническое оборудование ВПП.
Технической задачей настоящего изобретения является обеспечение возможности выполнения посадки самолетами при отказах их бортовых средств радиосвязи и АРК или выходе из строя штатного радиотехнического оборудования аэродромов (РЛС, ДПРМ) за счет использования для вывода в точку начала снижения штатной станции предупреждения о радиолокационном облучении (СПО) самолета и двух непрерывно работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, источников радиоизлучения (ИРИ), размещаемых на позициях приводных радиомаяков (дальнего и ближнего) и предназначенных для определения на борту самолета; оснащенного СПО, направления продольной оси ВПП, а также специальных правил выполнения экипажем самолета маневров захода на посадку по информации, отображаемой на индикаторе СПО.
1. Поставленная задача решается за счет того, что в известном способе, заключающимся в предварительном выходе самолета на дальний приводной радиомаяк (ДПРМ) с последующим отворотом на расчетный угол, причем после прохода ДПРМ самолет берет курс, обратный посадочному, с поправкой на угол отворота с таким расчетом, чтобы по истечении заданного времени самолет вышел в точку разворота на такой угол, при котором самолет после завершения разворота оказался бы в точке начала снижения (ТНС), лежащей в створе взлетно-посадочной полосы (ВПП), с последующим снижением и последовательным проходом над ДПРМ и ближним приводным радиомаяком (БПРМ), новым является то, что для привода самолета в район ДПРМ и совершения последующих маневров, обеспечивающих его выход в ТНС используются СПО самолета и два источника радиоизлучения, работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, и размещаемых на ДПРМ и БПРМ, соответственно в качестве резервных ИРИ для привода самолетов в аварийных ситуациях. Причем частоты ИРИ заранее заносятся в банк данных СПО и их разнос должен составлять 500-1000 МГц (например частота первого ИРИ, размещаемого на ДПРМ, составляет 8 ГГц, а второго, размещаемого на БПРМ - 9 ГТц). На борту самолета при подлете к аэродрому с помощью СПО определяются угловые направления на ИРИ, размещенные на ДПРМ и БПРМ, а по значениям измеренной частоты распознаются номера ИРИ и места их размещения (первый ИРИ - на ДПРМ и второй ИРИ - на БПРМ соответственно). Направления на ИРИ отображаются в секторе обзора по азимуту 0…360 град. на соответствующих секторах индикатора СПО (с точностью 2…3 град (СКО пеленгования) в секторе 60 град. в передней и задней полусфере и 10 град. в остальной части сектора обзора) [Станция предупреждения о радиолокационном облучении, Интернет сайт ЦКБА http://www.ckba.net/main.php?id=23]. Если первый и второй ИРИ отображаются с одной стороны и пеленг на второй ИРИ (БПРМ) больше пеленга на первый ИРИ (ДПРМ), то полет продолжают с тем же курсом до момента совпадения пеленгов от обоих ИРИ, то есть до момента пересечения самолетом осевой линии ВПП под углом а (сектор с правого борта), в котором совпали отметки двух ИРИ (ИРИ расположены по оси ВПП на удалении 4000 м. (первый ИРИ) и 1000 м. (второй ИРИ) от ее начала). В этот момент угломестным методом, реализованным в СПО, определяют расстояние до первого ИРИ и начинают разворот самолета на угол (360- а) град. в сторону противоположную направлению на ИРИ с одновременным снижением самолета до высоты, зависящей от удаленности самолета от первого ИРИ (ДПРМ), до момента совпадения отметок от двух ИРИ в нулевом секторе индикатора СПО, т.е. до момента попадания самолета в створ ВПП. В дальнейшем совершают полет с выдерживанием этого направления по глиссаде, обеспечивающей прохождение самолета над первым ИРИ на высоте 200 м, а над вторым ИРИ - на высоте 50-70 м. Моменты прохода над ИРИ, размещенными на дальнем и ближнем приводах, определяют на борту самолета по переходу отметок ИРИ из носового (нулевого) сектора в хвостовой (180 град).
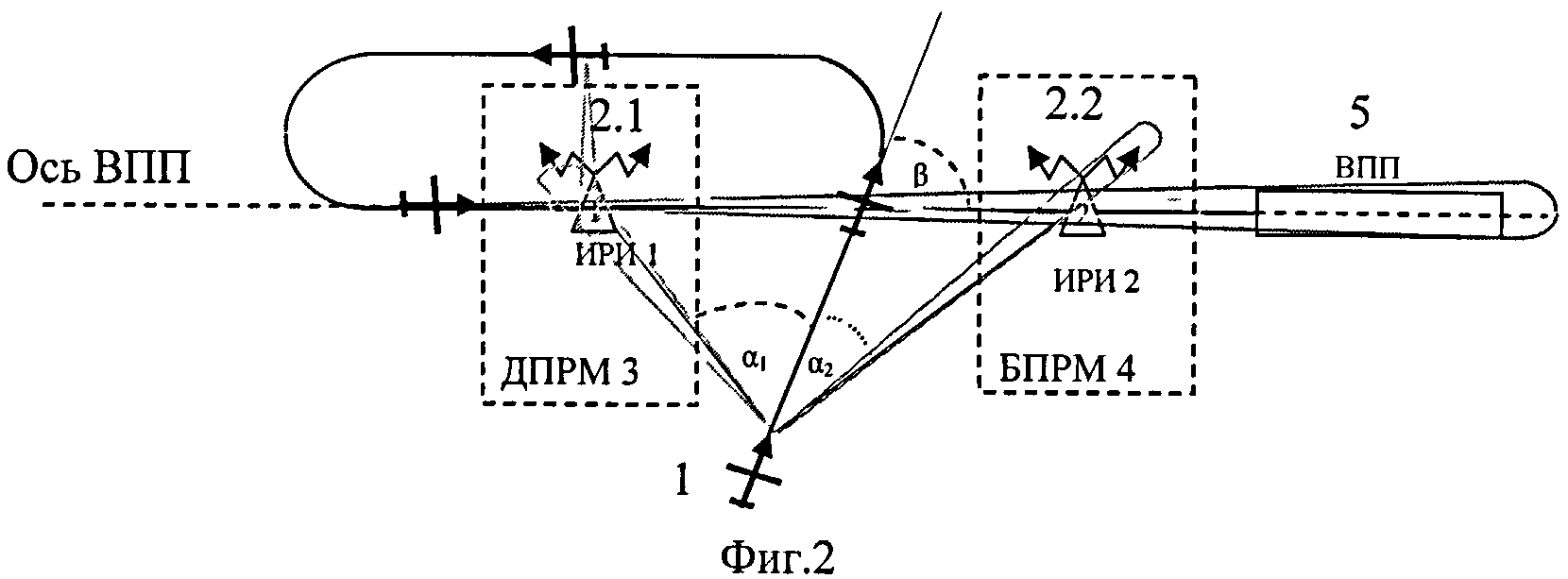
2. Поставленная задача решается за счет того, что в известном способе заключающимся в предварительном выходе самолета на ДПРМ с последующим отворотом на расчетный угол, причем после прохода ДПРМ самолет берет курс, обратный посадочному, с поправкой на угол отворота с таким расчетом, чтобы по истечении заданного времени самолет вышел в точку разворота на такой угол, при котором самолет после завершения разворота оказался бы в ТНС, лежащей в створе ВПП, с последующим снижением и последовательным проходом над ДПРМ и ближним приводным радиомаяком (БПРМ), новым является то, что для привода самолета в район ДПРМ используются СПО самолета и два источника радиоизлучения, работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, и размещаемых на ДПРМ и БПРМ, соответственно в качестве резервных ПРИ для привода самолетов в аварийных ситуациях. Причем частоты ИРИ заранее заносятся в банк данных СПО и их разнос должен составлять 500-1000 МГц (например частота первого ИРИ, размещаемого на ДПРМ, составляет 8 ГГц, а второго, размещаемого на БПРМ - 9 ГГц). На борту самолета при подлете к аэродрому с помощью СПО определяются угловые направления на ИРИ, размещенные на ДПРМ и БПРМ, а по значениям измеренной частоты распознаются номера ИРИ и места их размещения (первый ИРИ - на ДПРМ и второй ИРИ - на БПРМ соответственно). Направления на ИРИ отображаются в секторе обзора по азимуту 0…360 град. на соответствующих секторах индикатора СПО (с точностью 2…3 град (СКО пеленгования) в секторе 60 град. в передней и задней полусфере и 10 град. в остальной части сектора обзора) [Станция предупреждения о радиолокационном облучении, Интернет сайт ЦКБА http://www.ckba.net/main.php?id=23]. В случае если первый и второй ИРИ отображаются в секторах обнаружения СПО с разной стороны самолета, момент начала разворота определяют по моменту попадания отметок ИРИ в диаметрально противоположные сектора, после этого выполняют разворот по дуге окружности в сторону первого ИРИ на угол (180-β) град. (β - угол между продольной осью самолета и направлением на второй ИРИ) и прямолинейный полет до момента попадания отметки первого ИРИ в сектор 90 град. по левому борту. С этого момента выполняют разворот влево на 180 град. до момента совмещения отметок двух ИРИ в нулевом секторе СПО, то есть до момента попадания самолета в створ ВПП (фиг.2). В дальнейшем совершают полет с выдерживанием этого направления по глиссаде, обеспечивающей прохождение самолета над первым ИРИ на высоте 200 м, а над вторым ИРИ - на высоте 50-70 м. Моменты прохода над ИРИ, размещенными на дальнем и ближнем приводах, определяют на борту самолета по переходу отметок ИРИ из носового (нулевого) сектора в хвостовой (180 град).
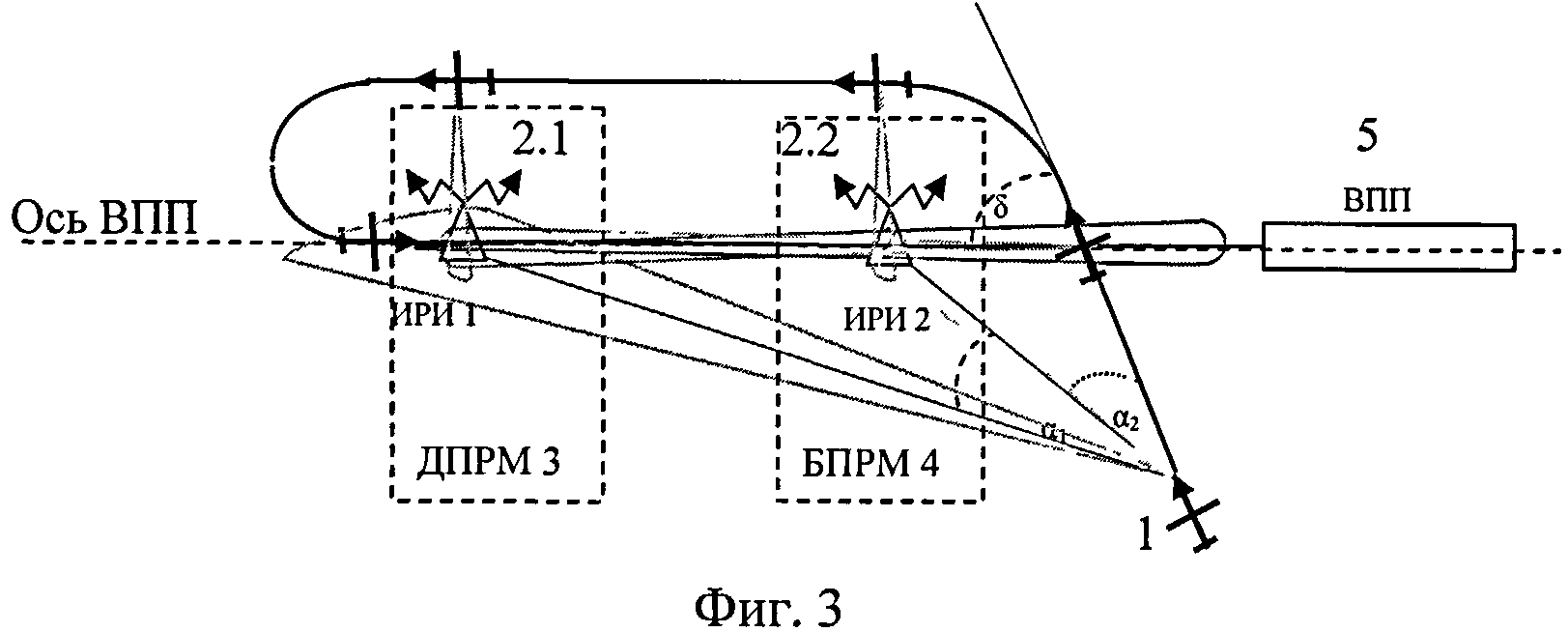
3. Поставленная задача решается за счет того, что в известном способе заключающимся в предварительном выходе самолета на ДПРМ с последующим отворотом на расчетный угол, причем после прохода ДПРМ самолет берет курс, обратный посадочному, с поправкой на угол отворота с таким расчетом, чтобы по истечении заданного времени самолет вышел в точку разворота на такой угол, при котором самолет после завершения разворота оказался бы в ТНС, лежащей в створе ВПП, с последующим снижением и последовательным проходом над ДПРМ и ближним приводным радиомаяком (БПРМ), новым является то, что для привода самолета в район ДПРМ используются СПО самолета и два источника радиоизлучения, работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, и размещаемых на ДПРМ и БПРМ, соответственно в качестве резервных ИРИ для привода самолетов в аварийных ситуациях. Причем частоты ИРИ заранее заносят в банк данных СПО и их разнос должен составлять 500-1000 МГц (например частота первого ИРИ, размещаемого на ДПРМ, составляет 8 ГГц, а второго, размещаемого на БПРМ - 9 ГГц). На борту самолета при подлете к аэродрому с помощью СПО определяют угловые направления на ИРИ, размещенные на ДПРМ и БПРМ, а по значениям измеренной частоты распознают номера ИРИ и места их размещения (первый ИРИ - на ДПРМ и второй ИРИ - на БПРМ, соответственно). Направления на ИРИ отображаются в секторе обзора по азимуту 0…360 град. на соответствующих секторах индикатора СПО (с точностью 2…3 град (СКО пеленгования) в секторе 60 град. в передней и задней полусфере и 10 град. в остальной части сектора обзора) [Станция предупреждения о радиолокационном облучении, Интернет сайт ЦКБА http://www.ckba.net /main.php? id=23]. При этом, когда первый и второй ИРИ отображаются с одной стороны и пеленг на первый ИРИ (ДПРМ) больше пеленга на второй ИРИ (БПРМ), то полет продолжают с тем же курсом до момента совпадения пеленгов от обоих ИРИ, то есть до момента пересечения самолетом осевой линии ВПП под углом δ (сектор с левого борта), в котором совпали отметки двух ИРИ. В этот момент определяют расстояния до второго ИРИ и начинают разворот самолета на угол δ по дуге окружности в сторону второго ИРИ и прямолинейный полет с момента попадания отметки второго ИРИ в сектор 90 град. по левому борту до момента попадания отметки первого ИРИ в сектор 90 град. по левому борту. С этого момента выполняют разворот влево на 180 град. до момента совмещения отметок двух ИРИ в нулевом секторе СПО, то ест. В дальнейшем совершают полет с выдерживанием этого направления по глиссаде, обеспечивающей прохождение самолета над первым ИРИ на высоте 200 м, а над вторым ИРИ - на высоте 50-70 м. Моменты прохода над ИРИ, размещенными на дальнем и ближнем приводах, определяют на борту самолета по переходу отметок ИРИ из носового (нулевого) сектора в хвостовой (180 град), ь до момента попадания самолета в створ ВПП (фиг.3).
Таким образом, предлагаемый способ посадки обеспечивает вывод самолета в ТИС при подходе самолета к ВПП с любой стороны и под любым углом.
Решение обладает новым свойством - возможностью обеспечения посадки самолетов при отказах их бортовых средств радиосвязи и автоматических радиокомпасов или выходе из строя штатного радиотехнического оборудования аэродромов (РЛС, ДПРМ) за счет использования для вывода в точку начала снижения штатной станции предупреждения о радиолокационном облучении самолета и двух непрерывно работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, источников радиоизлучения (ИРИ), размещаемых па позициях приводных радиомаяков (дальнего и ближнего) и специальных правил выполнения экипажем самолета маневров захода на посадку по информации, отображаемой на индикаторе СПО. При этом использование режима захода на посадку по сигналам СПО позволяет осуществить вывод самолета в точку начала снижения, лежащую в створе ВПП, при подходе самолета к аэродрому с любой стороны и под любым углом к ВПП как в простых, так и в сложных метеоусловиях, днем и ночью.
На фиг.1 представлена схема реализации предлагаемого способа захода самолета на посадку для случая, когда при подлете к аэродрому оба ИРИ расположены по правому борту самолета. На фиг.2 представлена схема реализации предлагаемого способа в случае, когда ПРИ расположены по разным бортам самолета, а на фиг.3 - когда оба ИРИ расположены по левому борту самолета.
Схема реализации предлагаемого способа захода самолета на посадку состоит из самолета с СПО 1, ИРИ 2.1 и 2.2, ДПРМ 3, БПРМ 4, ВИЛ 5.
Таким образом, заявленный способ захода самолета на посадку обеспечивает решение задачи обеспечения посадки самолета при отказах его бортовых средств радиосвязи и автоматических радиокомпасов или выходе из строя штатного радиотехнического оборудования аэродромов (РЛС, ДПРМ) за счет использования для вывода в ТЫС штатной станции предупреждения о радиолокационном облучении самолета и двух непрерывно работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО самолета 1, источников радиоизлучения ИРИ 2.1 и 2.2, размещаемых на позициях приводных радиомаяков (дальнего ДПРМ 3 и ближнего БПРМ 4) и специальных правил выполнения экипажем самолета маневров захода на посадку по информации, отображаемой на индикаторе СПО самолета 1.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленных изобретений, позволил установить, что заявитель не обнаружил аналогов, характеризующийся признаками, тождественными всем существенным признакам предлагаемого способа захода самолета на посадку. Выбор из перечня выявленных аналогов прототипов, как наиболее близких по совокупности существенных признаков аналога, позволил выявить совокупность существенных по отношению к сформулированному техническому результату признаков в заявленном способе, которые изложены в формуле изобретения. Поэтому заявленное изобретение соответствует критерию «новизна».
Для проверки соответствия заявленного изобретения критерию «изобретательский уровень» проведен поиск и анализ известных технических решений с целью выявления признаков, совпадающих с признаками предлагаемых способа захода самолета на посадку. Результаты поиска показали, что заявленное изобретение не вытекает явным образом из известного уровня техники, определенного заявителем. Заявленным изобретением не предусматриваются следующие преобразования:
дополнение известного средства каким-либо известным блоком, присоединяемым к нему по известным правилам, для достижения технического результата;
замена какой-либо части известного средства другой известной частью для достижения технического результата;
увеличение однотипных элементов для достижения сформулированного технического результата;
создание средства, состоящего из известных частей, выбор которых и связь между ними осуществлен по известным правилам, а достигнутый при этом технический результат обусловлен только известными свойствами частей этого средства и связями между ними.
Следовательно, заявленное изобретение соответствуют критерию «Изобретательский уровень».
Предлагаемое решение соответствует критерию «промышленная применимость», так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособность и воспроизводимость, так как для реализации заявляемого решения могут быть использованы известные материалы и оборудование.
Способ захода самолета на посадку в аварийных ситуациях реализуется следующим образом.
Для вывода самолета с СПО 1 в точку начала снижения при отказах бортового АРК или ДПРМ 3 аэродрома используются СПО и два источника радиоизлучения ПРИ 2.1 и 2.2, работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, самолета, и размещаемых на ДПРМ 3 и БПРМ 4 как резервные ИРИ. Причем частоты ИРИ 2.1 и 2.2 заранее заносятся в банк данных СПО самолета и их разнос должен составлять 500-1000 МГц (например частота первого ИРИ 2.1, размещаемого на ДПРМ 3, может быть 8 ГГц, а второго 2.2, размещаемого на БПРМ 4-9 ГГц). На борту самолета 1 при подлете к аэродрому с помощью СПО самолета определяют угловые направления на ИРИ 2.1, 2.2, размещенные на ДПРМ 3 и БПРМ 4, а по значениям измеренной частоты распознают номера ПРИ и места их размещения (ИРИ 2.1 - на ДПРМ 3 и ИРИ 2.2 - на БПРМ 4 соответственно). Направления на ИРИ отображаются в секторе обзора по азимуту 0…360 град. на соответствующих секторах индикатора СПО самолета и соответствуют угловому положению ИРИ в секторе 60 град. в передней и задней полусфере с точностью 2…3 град (СКО пеленгования), а в остальной части сектора обзора с точностью 10 град [Станция предупреждения о радиолокационном облучении, Интернет сайт ЦКБА http://www.ckba.net/main.php?id=23]. В зависимости от взаимного положения самолета 1 и двух наземных ИРИ 2.1, 2.2 возможны следующие варианты реализации способа захода на посадку:
1. Если первый и второй ПРИ 2.1, 2.2 отображаются с одной стороны и пеленг на второй ИРИ 2.2 (БПРМ 4) больше пеленга на первый ПРИ 2.1 (ДПРМ 3), то полет самолета 1 продолжают с тем же курсом до момента совпадения пеленгов от обоих ИРИ, то есть до момента пересечения самолетом 1 осевой линии ВПП 5 под углом α (сектор с правого борта), в котором совпали отметки двух ИРИ (ИРИ 2.1 и 2.2 расположены по оси ВПП 5 на удалении 4000 м. (ИРИ 2.1) и 1000 м. (ИРИ 2.2) от ее начала). В этот момент угломестным методом, реализованным в СПО самолета, определяют расстояние до ИРИ 2.1 (точность 10-15% от дальности до ИРИ) и начинают разворот самолета 1 на угол (360-α) град. в сторону противоположную направлению на ИРИ 2.1 с одновременным снижением самолета до высоты, зависящей от удаленности самолета 1 от первого ПРИ 2.1 (ДПРМ 3), до момента совпадения отметок от двух ИРИ 2.1, 2.2 в нулевом секторе индикатора СПО самолета (совпадает с продольной осью самолета). В дальнейшем полет совершают с выдерживанием этого направления по глиссаде, обеспечивающей прохождение самолета над первым ИРИ 2.1 на высоте 200 м, а над вторым ИРИ 2.2 - на высоте 50-70 м. Моменты прохода над ИРИ, размещенными на дальнем и ближнем приводах, определяются на борту самолета 1 по переходу отметок ИРИ из носового (нулевого) сектора в хвостовой (180 град). Таким образом, производится вывод самолета 1 в точку начала снижения при посадке.
2. Если ИРИ 2.1 и 2.2 отображаются в секторах обнаружения СПО самолета 1 с разной стороны самолета, момент начала разворота определяют по моменту попадания отметок ИРИ 2.1, 2.2 в диаметрально противоположные сектора, после этого выполняют разворот по дуге окружности в сторону первого ИРИ 2.1 на угол (180-β) град.(β - угол меду продольной осью самолета 1 и направлением на второй ИРИ 2.2 (БПРМ 4) и прямолинейный полет до момента попадания отметки ИРИ 2.1 в сектор 90 град. по левому борту. С этого момента выполняют разворот влево на 180 град. до момента совмещения отметок двух ИРИ 2.1, 2.2 в нулевом секторе СПО самолета 1, то есть до момента попадания самолета 1 в створ ВПП 5. В дальнейшем выполняют эволюции аналогичные описанным в первом варианте.
3. Если ИРИ 2.1 и 2.2 отображаются с одной стороны и пеленг на первый ПРИ 2.1 (ДПРМ 3) больше пеленга на второй ИРИ 2.2 (БПРМ 4), то полет продолжают с тем же курсом до момента совпадения пеленгов от обоих ИРИ 2.1, 2.2, то есть до момента пересечения самолетом 1 осевой линии ВПП 5 под углом 5 (сектор с левого борта), в котором совпали отметки двух ИРИ. В этот момент определяют расстояния до ИРИ 2.2 и начинают разворот самолета 1 на угол 5 по дуге окружности в сторону второго ИРИ 2.2 и прямолинейный полет с момента попадания отметки второго ИРИ 2.2 в сектор 90 град. по левому борту до момента попадания отметки первого ИРИ 2.1 в сектор 90 град. по левому борту. В дальнейшем выполняют действия аналогичные второму варианту.
Проведем количественный анализ эффективности предложенного способа захода самолета на 1 посадку. Вероятность выведения самолета 1 в ТНС по информации от СПО самолета 1 можно рассматривать как вероятность попадания первого ИРИ 2.1 в носовой сектор углов СПО самолета 1 после окончания разворота самолета в сторону противоположную ИРИ 2.1 и выхода в исходную точку начала разворота. В идеальном случае после окончания разворота нулевой сектор углов СПО самолета 1 должен занять то угловое положение, которое занимал до начала разворота боковой сектор приема, в котором произошло совпадение угловых отметок от первого и второго ИРИ 2.1, 2.2. В реальных условиях в силу воздействия случайных факторов (ветровых возмущений, ошибок устройств, задающих программу разворота и реализующих эту программу - автопилота, рулей поворота и др.) ориентация нулевого сектора углов СПО самолета после окончания разворота самолета оказывается отличной от требуемой. Полагая, что ошибка ориентации рабочего сектора углов СПО самолета 1 распределена по нормальному закону, вероятность попадания ИРИ 2.1 в этот сектор после окончания разворота самолета 1 можно записать в виде [Вентцель B.C., Овчаров Л.А. Прикладные задачи теории вероятностей. - М.: Радиосвязь, 1983, с.105-106]:

где mИРИ - угловое положение первого ИРИ 2.1 относительно оси симметрии бокового сектора приема, в котором произошло его совпадение с угловым положением второго ИРИ 2.2, до начала разворота самолета (т.е. в момент пересечения оси ВПП);
Ф(х), θ1, θ2, σ - функция Лапласа, границы рабочего сектора углов СПО самолета 1 при его идеальной ориентации и среднеквадратическая ошибка ориентации рабочего сектора углов СПО самолета после окончания разворота самолета, соответственно.
Угловое положение ИРИ 2.1 в момент его обнаружения в боковом секторе приема mИРИ также является случайным. Полагая mИРИ распределенным равномерно в пределах сектора [θ1, θ2], получим выражение для вероятности наведения самолета 1:

Среднеквадратическую ошибку ориентации σ определим как результат воздействия перечисленных выше случайных факторов:

 - среднеквадратическая составляющая ошибки ориентации, вызываемая воздействием случайных порывов ветра, ΔDcл=σВΔt;
- среднеквадратическая составляющая ошибки ориентации, вызываемая воздействием случайных порывов ветра, ΔDcл=σВΔt;
D - расстояние от самолета 1 до ИРИ 2.1 в момент окончания разворота;
Δt - продолжительность разворота,
σВ - среднеквадратическое значение скорости случайных порывов ветра;
 - среднеквадратическая составляющая ошибки ориентации, вызываемая ошибками системы управления самолета 1;
- среднеквадратическая составляющая ошибки ориентации, вызываемая ошибками системы управления самолета 1;
 - скорость нарастания угловой ошибки ориентации вследствие ошибок системы управления самолета 1.
- скорость нарастания угловой ошибки ориентации вследствие ошибок системы управления самолета 1.
Продолжительность разворота Δt определим, аппроксимируя кривую разворота замкнутой окружностью минимального радиуса r:

где V - скорость самолета 1;
а - максимальное поперечное ускорение самолета 1.
Расчеты по формулам (1)…(3) показывают, что для типовых характеристик самолета (скорость полета V=(120…200) м/с, поперечные перегрузки a=(1.5…2)g, g=9,81 м/с2, скорость нарастания угловой ошибки  град/с, ширина рабочего сектора углов СПО в передней полусфере Δθ=θ2-θ1=60 град) и условий их применения (дальность до ИРИ 2.1 D=(5…40) км, среднеквадратическое значение случайных порывов ветра σB=6 м/с) вероятность выведения самолета 1 на ИРИ 2.1, то есть в точку начала снижения, составит 0,85…0,93.
град/с, ширина рабочего сектора углов СПО в передней полусфере Δθ=θ2-θ1=60 град) и условий их применения (дальность до ИРИ 2.1 D=(5…40) км, среднеквадратическое значение случайных порывов ветра σB=6 м/с) вероятность выведения самолета 1 на ИРИ 2.1, то есть в точку начала снижения, составит 0,85…0,93.
Анализ полученных результатов показывает, что предлагаемый способ захода самолета на посадку в аварийных ситуациях (при отказах АРК и ДПРМ) обеспечивает высокую вероятность выхода самолета в точку начала снижения (0.85…0.93) и может рассматриваться как резервный способ захода на посадку практически всех типов самолетов ВВС.
Изложенные сведения свидетельствуют о возможности выполнения при реализации заявленного способа захода самолета на посадку следующей совокупности условий:
предлагаемый способ захода самолета на посадку при его реализации позволит обеспечить эффективный вывод самолета в точку начала снижения при отказах бортового радиоэлектронного оборудования самолета и наземных средств аэродрома;
показана возможность реализации на практике заявленного способа захода самолета на посадку в том виде, как он охарактеризован в формуле изобретения, с помощью описанных в заявке или известных до даты приоритета средств и методов;
предлагаемый способ захода самолета на посадку, при его разработке способен обеспечить достижение усматриваемого заявителем технического результата.

Модульный молекулярный конъюгат для направленной доставки генетических конструкций и способ его получения
Система автоматического управления самолетом при заходе на посадку
Молекулярные конъюгаты с поликатионным участком и лигандом для доставки в клетку и ядро клетки днк и рнк
Способ точной посадки беспилотного летательного аппарата
Способ вертебропластики
Система автоматического управления самолетом при снижении
Устройство управления резервированной с выбором среднего арифметического значения выходных параметров системой
Формирователь последовательности прямоугольных импульсов с изменяемой длительностью и интервалом
Устройство восстановления работоспособности резервированной системы с помощью мажоритарных элементов
Способ резервирования систем с использованием методов нечеткой логики
Способ контроля вязкости жидкостей
Способ функционального поражения радиолокационной станции с фазированной антенной решеткой
Способ согласования комплексных сопротивлений и устройство его реализации
Способ демодуляции фазомодулированных и частотно-модулированных сигналов и устройство его реализации
Способ согласования комплексных сопротивлений и устройство его реализации
Приемное устройство с цифровой обработкой принимаемых сигналов
Способ постановки протяженного аэрозольного образования для прикрытия группы объектов
Способ измерения относительной влажности воздуха
Способ извлечения теобромина из водных растворов
Устройство искажения радиолокационного изображения объекта

