Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА КОНТРОЛЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ
Вид РИД
Изобретение
Предшествующий уровень техники
Настоящее изобретение относится к общей области контроля турбореактивного двигателя. В частности, оно касается способа и системы, позволяющих автоматически обнаруживать попадание постороннего предмета в турбореактивный двигатель самолета во время полета.
Во время полета в турбореактивный двигатель могут попадать посторонние предметы или детали, отделившиеся от турбореактивного двигателя, которые могут привести к повреждениям внутри этого двигателя. В частности, столкновение предмета с лопаткой вентилятора может привести к ее повреждению. В случае повреждений, связанных с попаданием посторонних предметов в турбореактивный двигатель (например, птиц), говорят о повреждениях FOD (от “Foreign Object Damage”). В случае повреждений, связанных с попаданием отделившихся деталей турбореактивного двигателя (например, заклепок, болтов и т.д.), говорят о повреждениях DOD (от “Domestic Object Damage”).
Известны различные решения для обнаружения повреждений FOD или DOD. Одно из этих решений основано на измерении вибраций одного из роторов турбореактивного двигателя для обнаружения появления дисбаланса в результате его повреждения при попадании предмета. В случае обнаружения дисбаланса осуществляют визуальный осмотр турбореактивного двигателя на земле (например, при помощи эндоскопии): присутствие следов удара, перьев птиц или выемок на лопатках в месте удара позволяет, таким образом, диагностировать наличие повреждений FOD или DOD.
Однако такое решение имеет целый ряд недостатков. В частности, оно не позволяет обнаруживать наличие повреждений FOD или DOD, которые не приводят к дисбалансу на роторах турбореактивного двигателя (или приводят к слишком незначительному дисбалансу, чтобы его можно было обнаружить). Кроме того, визуальный осмотр турбореактивного двигателя требует вмешательства на земле, которое необходимо планировать заранее и которое может оказаться затратным по времени.
Другое известное решение состоит в использовании измерительных инструментов, установленных на борту самолета (таких как радары), для обнаружений повреждений FOD или DOD. Недостатком этого решения является необходимость установки дополнительных инструментов, которая по сравнению с получаемым выигрышем является дорогой и приводит к увеличению массы самолета.
Из документа US 2007/0250245 известен также способ контроля турбореактивного двигателя, позволяющий практически моментально обнаруживать повреждение турбореактивного двигателя в результате попадания в него постороннего предмета. Для этого, согласно указанному способу, в режиме реального времени сравнивают вибрационный уровень ротора турбореактивного двигателя с заранее определенным порогом. В случае превышения этого порога в течение заранее определенного времени подается тревожный сигнал о необходимости проведения обслуживания.
Однако этот способ имеет несколько недостатков. В частности, он ограничен обнаружением повреждений FOD или DOD, которые, по меньшей мере, временно привели к деформации лопатки вентилятора (способ обрабатывает только ограниченные вибрационные данные). Таким образом, способ не позволяет обнаружить простой удар при попадании постороннего тела без деформации (временной или окончательной) лопатки вентилятора. Кроме того, для выдачи тревожного сигнала о необходимости обслуживания необходимо, чтобы превышение порога произошло за минимальное время. Поэтому существует риск того, что некоторые повреждения FOD или DOD не будут обнаружены при помощи этого способа. Наконец, способ не предусматривает возможности предотвращения ложных тревог путем устранения электронных помех сигнала.
Из документа US 6,907,368 известен также способ обнаружения попадания отделившихся деталей (DOD) путем анализа, при помощи преобразования Фурье, сигнала, характерного для шума турбореактивного двигателя во время работы. Несмотря на свою эффективность при обнаружении повреждений DOD, этот способ имеет тот недостаток, что не позволяет избежать ложных тревог, вызванных возмущениями, причиной которых не является попадание в двигатель отделившихся деталей.
Объект и сущность изобретения
Таким образом, настоящее изобретение призвано устранить такие недостатки и предложить надежное автоматическое обнаружение повреждений FOD или DOD, даже если они не приводят к появлению дисбаланса на одном из роторов турбореактивного двигателя или к деформации лопатки вентилятора.
В связи с этим объектом настоящего изобретения является способ контроля турбореактивного двигателя, состоящий в том, что:
получают сигнал, характерный для вибрационного уровня ротора во время работы турбореактивного двигателя;
получают режим вращения ротора во время работы;
сравнивают амплитуду сигнала, по меньшей мере, с одним заранее определенным вибрационным порогом в зависимости от режима вращения ротора; и
в случае превышения порога пиком амплитуды анализируют сигнал во временном окне, образованном вокруг пика амплитуды, чтобы определить, является ли явление, ставшее причиной пика амплитуды, механическим ударом, которому подвергся ротор турбореактивного двигателя или электронное возмущение сигнала.
Способ в соответствии с настоящим изобретением содержит этап анализа сигнала после обнаружения превышения вибрационного порога пиком амплитуды. Целью этого этапа является определение того, что явлением, вызвавшим пик амплитуды, является именно механический удар, которому подвергся ротор турбореактивного двигателя, а не простое электронное возмущение сигнала. Таким образом, можно устранить любую ложную тревогу.
Кроме того, способ в соответствии с настоящим изобретением позволяет производить обнаружение самых разных явлений, приводящих к пику амплитуды: таким образом, не обязательно, чтобы предмет, попавший в турбореактивный двигатель, вызывал дисбаланс или приводил к деформации (даже временной) лопатки вентилятора, чтобы его можно было обнаружить.
В целом способ в соответствии с настоящим изобретением обеспечивает передачу сообщения обслуживания для предписания визуального осмотра реальных повреждений, вызванных попаданием предмета в турбореактивный двигатель (например, в конце полета), не дожидаясь заранее запланированного технического осмотра. Таким образом, можно избежать долгосрочного ухудшения характеристик турбореактивного двигателя и максимально быстро устранить повреждения, появившиеся в результате попадания постороннего предмета.
Наконец, способ в соответствии с настоящим изобретением можно применять при помощи измерительных инструментов (в частности, акселерометров) или систем сбора данных (в частности, электронного вычислителя), уже присутствующих на большинстве самолетов или на самих турбореактивных двигателях.
Этап анализа сигнала во временном окне может содержать анализ симметрии сигнала. Альтернативно или в комбинации этап анализа сигнала во временном окне может также содержать моделирование ослабления сигнала после пика амплитуды. В этом втором случае этап анализа сигнала во временном окне состоит в вычислении отклонения между кривой среднего значения амплитуд спектрограммы сигнала во временном окне в каждый момент и его моделирование посредством экспоненциальной функции.
Предпочтительно заранее определенный порог содержит верхние и нижние значения сигнала в разных диапазонах режима вращения ротора.
Согласно предпочтительному отличительному признаку, способ дополнительно состоит, после определения механического удара, которому подвергся ротор турбореактивного двигателя, в определении появился ли дисбаланс на роторе в результате этого механического удара.
В этом случае этап определения появления дисбаланса на роторе может содержать выполнение спектрограммы сигнала во временном окне, вычисление среднего значения амплитуд спектрограммы в каждый момент, вычисление разности уровня среднего значения до и после пика амплитуды и сравнение разности уровня с заранее определенным порогом уровня.
Предпочтительно этапы получения сигнала и режима вращения ротора выполняют непрерывно во время рабочего цикла турбореактивного двигателя.
Предпочтительно этапы получения сигнала и режима вращения ротора и этап сравнения амплитуды сигнала выполняют в реальном времени, при этом этап анализа сигнала выполняют с запаздыванием.
Предпочтительно сообщение обслуживания передают, если было определено, что явлением, ставшим причиной пика амплитуды, является механический удар, которому подвергся ротор турбореактивного двигателя. Это сообщение обслуживания может быть передано во время полета бригадам обслуживания аэропорта назначения. Таким образом, визуальный осмотр после обнаружения механического удара может быть подготовлен заранее, чтобы оптимизировать время стоянки самолета на земле, необходимое для этого осмотра.
Объектом настоящего изобретения является также система контроля турбореактивного двигателя, содержащая средства получения сигнала, характерного для вибрационного уровня, и режима вращения ротора во время работы турбореактивного двигателя, средства сравнения амплитуды сигнала, по меньшей мере, с одним заранее определенным вибрационным порогом в зависимости от режима вращения ротора и средства анализа сигнала во временном окне, активируемые в случае превышения порога пиком амплитуды, для определения, является ли явление, ставшее причиной пика амплитуды, механическим ударом, которому подвергся ротор турбореактивного двигателя, или электронным возмущением сигнала.
Объектом настоящего изобретения является также турбореактивный двигатель, содержащий вышеуказанную систему контроля.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
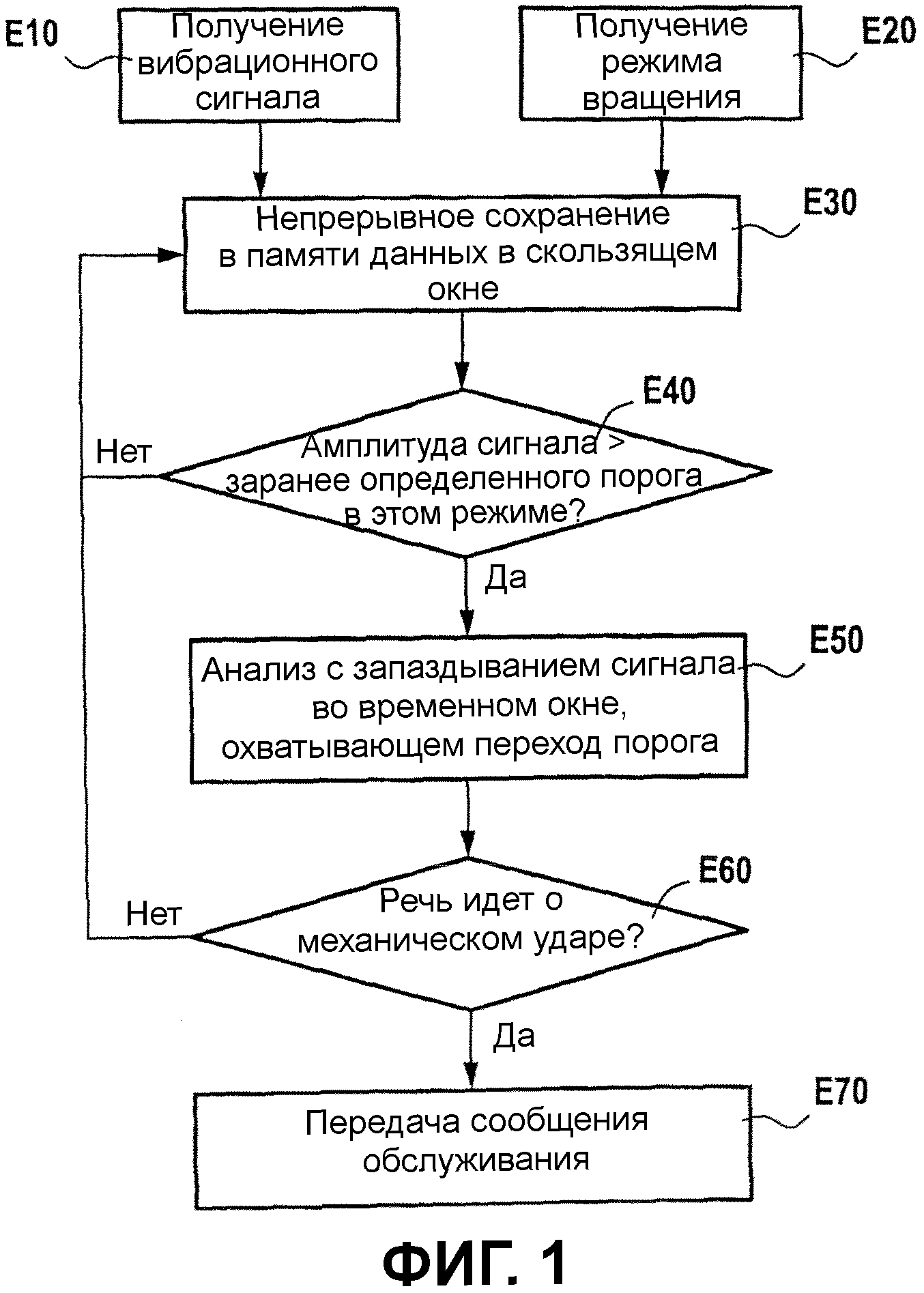
Фиг.1 - блок-схема основных этапов способа в соответствии с настоящим изобретением.
Фиг.2, 3, 4А, 4Б, 5А, 5Б, 6А, 6Б, 7 и 8 - примеры применения способа в соответствии с настоящим изобретением.
Подробное описание варианта выполнения
Способ и система контроля в соответствии с настоящим изобретением позволяют автоматически обнаруживать попадание в турбореактивный двигатель самолета предмета (постороннего тела или детали, отделившейся от турбореактивного двигателя) во время полета.
Способ основан на анализе необработанных временных сигналов, поступающих от датчиков вибраций (типа акселерометров), как правило, установленных на турбореактивном двигателе для обеспечения традиционных функций вибрационного контроля.
Как известно, эти датчики вибраций позволяют измерять вибрационные уровни одного из роторов турбореактивного двигателя во время его работы. Для обработки сигнала они соединены с электронным вычислительным устройством (называемым также EMU от “Engine Monitoring Unit”), которое может присутствовать в самолете (например, в отсеке) или может быть установлено непосредственно на турбореактивном двигателе.
Как показано на фиг.1 способ контроля в соответствии с настоящим изобретением сначала состоит в получении в реальном времени во время полета сигнала, поступающего от датчиков вибраций (этап Е10), а также режима вращения ротора (этап Е20).
Под получением «в реальном времени сигнала, поступающего от датчиков вибрации», следует понимать, что сигналы, принятые датчиками, немедленно передаются в электронное вычислительное устройство турбореактивного двигателя во время полета для обработки, при этом все же может возникать небольшое смещение во времени между моментом появления вибраций и моментом, когда электронное вычислительное устройство преобразует эти сигналы с целью обработки.
Что касается получения режима вращения ротора во время полета (этап Е20), то оно состоит, например, в преобразовании сигнала тахометрического датчика, установленного на роторе (такой датчик может уже присутствовать на турбореактивном двигателе). В частности, это получение можно осуществлять на частоте дискретизации, намного меньшей, чем частота сигнала, поступающего от датчиков вибрации.
Полученные таким образом данные (сигнал от датчиков вибрации и режим вращения двигателя) временно сохраняют в памяти в непрерывном режиме в ходе полета (этап Е30).
Следующий этап (Е40) состоит в сравнении амплитуды сигнала, поступившего от датчиков вибрации, по меньшей мере, с одним заранее определенным вибрационным порогом в зависимости от режима вращения ротора. Этот этап тоже осуществляют в режиме реального времени в ходе полета.
В случае превышения порога пиком амплитуды предусматривается, во время этапа Е50, анализ сигнала во временном окне, образованном вокруг пика амплитуды.
Этот этап анализа Е50 позволяет определить, что явлением, ставшим причиной пика амплитуды, является именно механический удар, которому подвергся ротор турбореактивного двигателя в результате попадания предмета, а не простое электронное возмущение сигнала (Е60).
В случае механического удара, которому подвергся ротор, сообщение обслуживания может быть передан (этап Е70), например, в бригаду наземного обслуживания, чтобы затребовать визуальный осмотр турбореактивного двигателя с целью оценки возможных повреждений турбореактивного двигателя. В случае простого электронного возмущения сигнала никаких действий не производится, и процесс продолжается.
Этапы анализа сигнала (Е50), определения причины пика амплитуды (Е60) и передачи сообщения обслуживания (Е70) предпочтительно осуществляют на уровне электронного вычислительного устройства EMU, которое содержит соответствующие средства обработки сигнала. Вместе с тем, эти этапы можно осуществлять на уровне наземного компьютера. В этом случае данные сигнала будут переданы на этот компьютер либо во время полета, либо по прилету самолета.
Кроме того, этап Е50 анализа сигнала выполняют с запаздыванием (в отличие от анализа в реальном времени). Предпочтительно его выполняют в любой момент во время полета до посадки самолета и параллельно с получением сигнала и режима вращения ротора и сравнением сигнала с заранее определенным вибрационным порогом.
Далее следует описание примера осуществления некоторых этапов способа контроля в соответствии с настоящим изобретением.
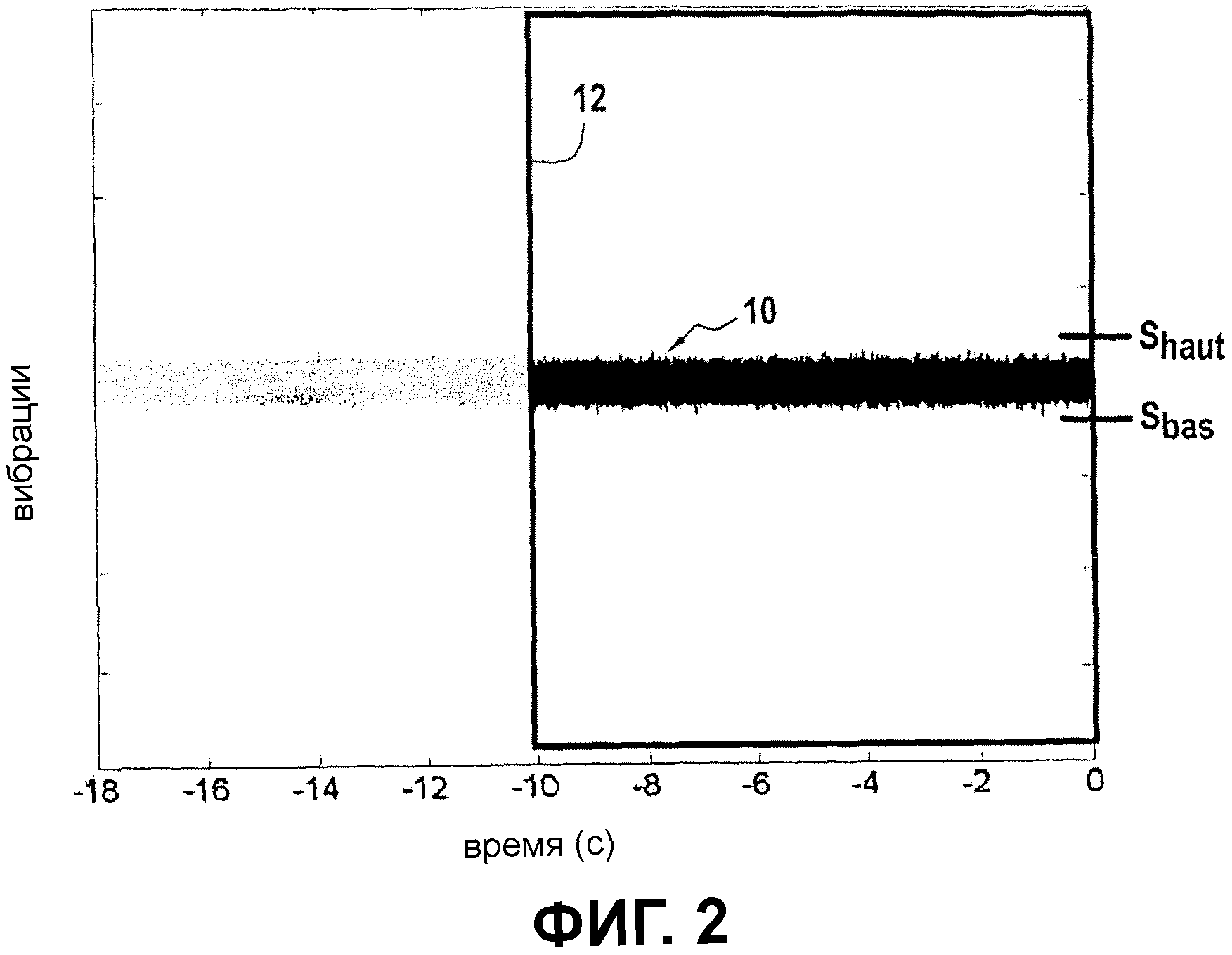
Так, на фиг.2 показан пример временного сигнала 10, характерного для вибрационного уровня ротора во время работы турбореактивного двигателя и поступающего от датчика вибраций. На этой фиг.2 показан сигнал после преобразования электронным вычислительным устройством EMU.
Сигнал 10 регистрируют в непрерывном режиме во время полета в скользящем временном окне 12, продолжительность которого составляет, например, порядка 10 секунд. Как известно, скользящее временное окно предназначено для «отслеживания» сигнала и его непрерывной записи в течение фиксированного периода по мере получения сигнала. Это скользящее окно сохраняется в памяти электронного вычислительного устройства EMU.
На фиг.2 показаны также две линии, характерные для верхнего значения Shaut и нижнего значения Sbas сигнала для конкретного режима вращения ротора.
Эти значения определяют заранее определенные пороги сигнала, которые соответствуют «нормальной» работе турбореактивного двигателя, то есть работе турбореактивного двигателя без попадания в него посторонних предметов. Оценку этих значений производят на основании вибрационных данных, снятых на одном или нескольких турбореактивных двигателях, принадлежащих к одному или нескольким разным классам, во время испытаний на земле или в воздухе. Предпочтительно эти значения получают на основании данных, регистрируемых в полете для одного и того же класса турбореактивных двигателей.
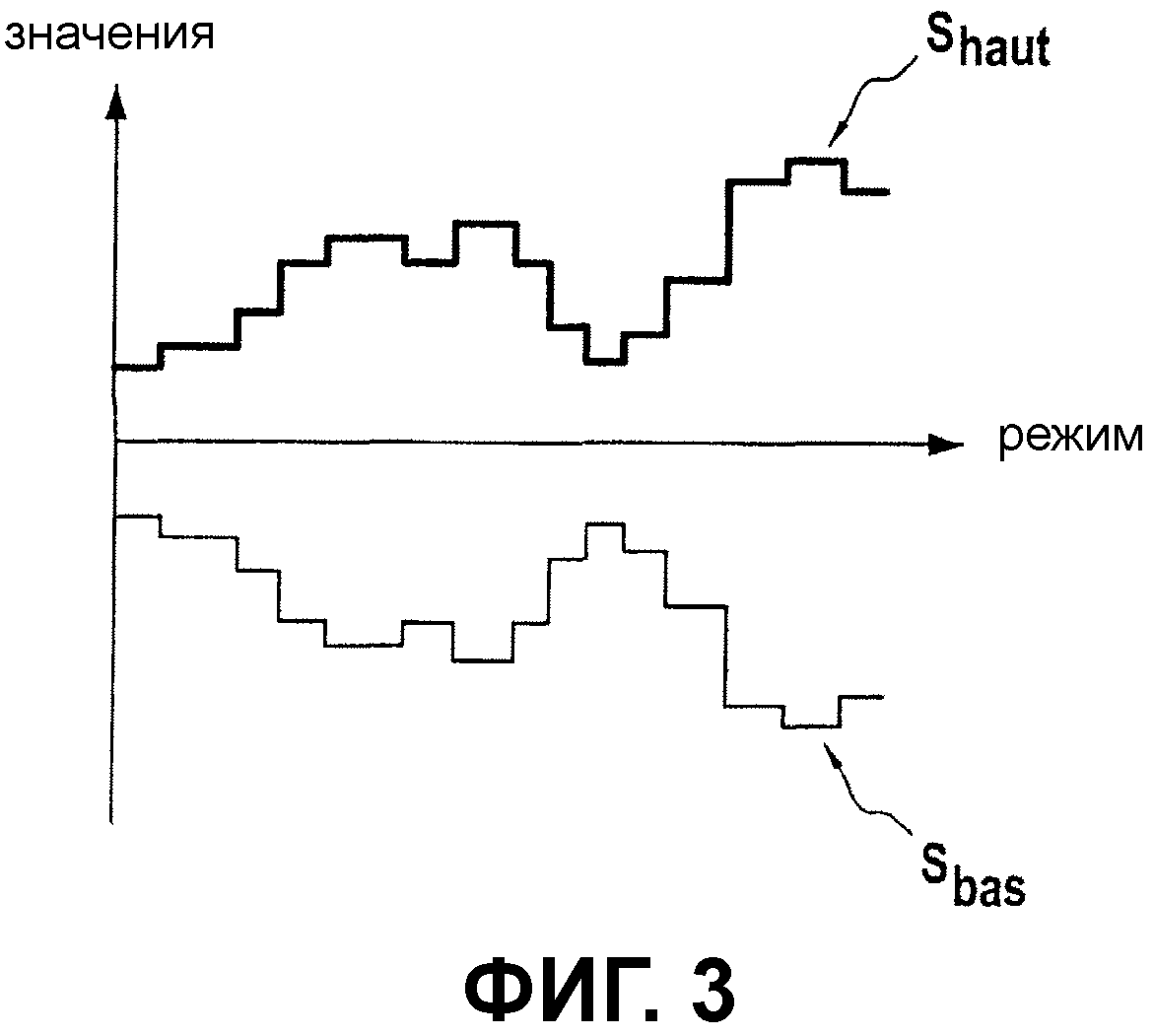
Как показано на фиг.3, максимальные значения Shaut и минимальные значения Sbas, определяющие пороги, зависят от режима вращения ротора турбореактивного двигателя. На этой фигуре эти значения определены в различных коротких диапазонах режима вращения ротора.
Во время этапа Е40 способа (фиг.1) амплитуду сигнала, зарегистрированного в скользящем временном окне, постоянно (то есть непрерывно) сравнивают с верхними и нижними значениями, определяющими заранее определенные пороги сигнала для рассматриваемого режима вращения ротора.
Этот этап сравнения, который осуществляют на уровне электронного вычислительного устройства EMU, позволяет обнаружить возможное превышение заранее определенных порогов пиком амплитуды сигнала. В случае, показанном на фиг.3, пик амплитуды сигнала, выходящий за пределы Shaut (в области положительных значений) или Sbas (в области отрицательных значения), должен быть немедленно обнаружен.
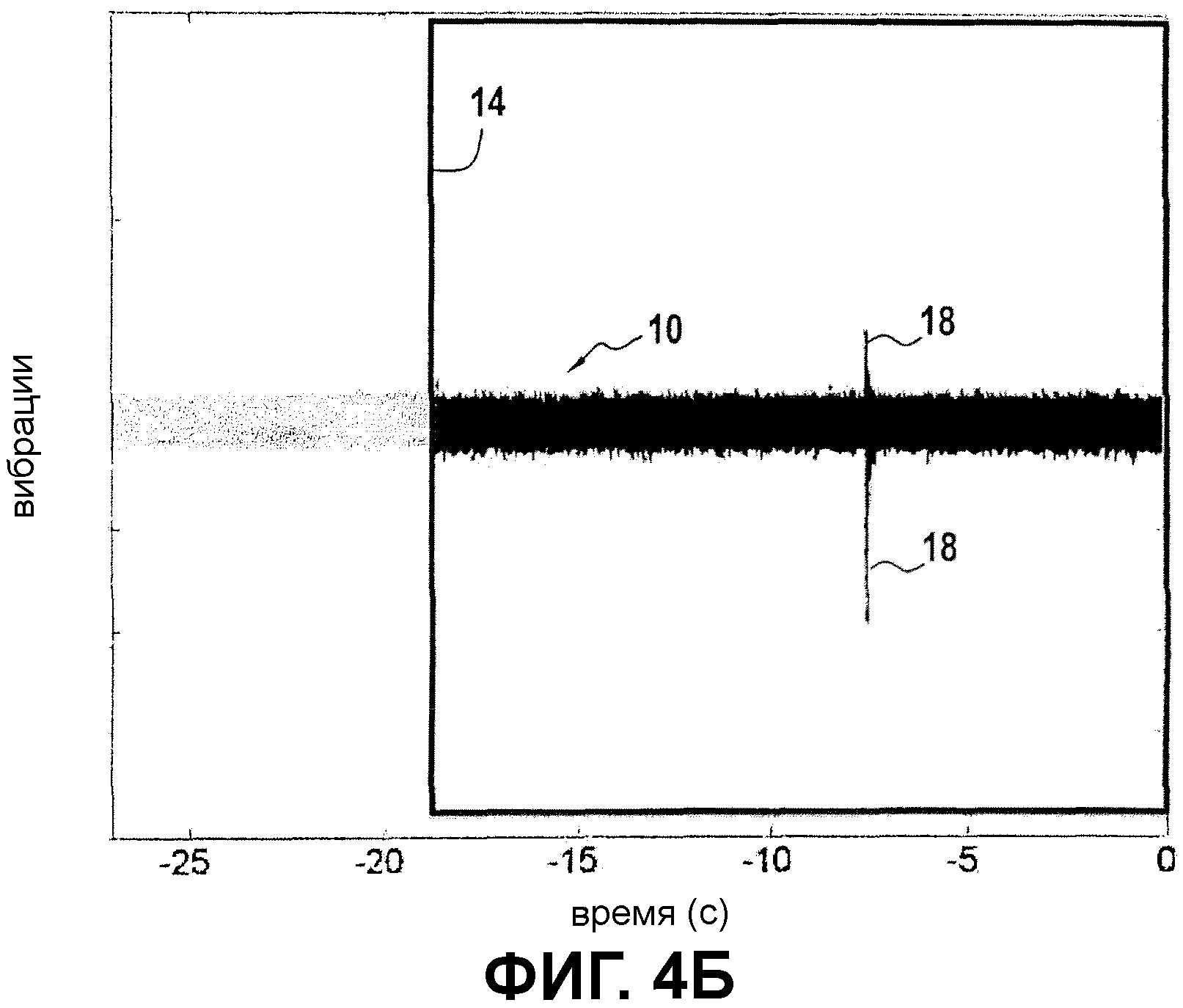
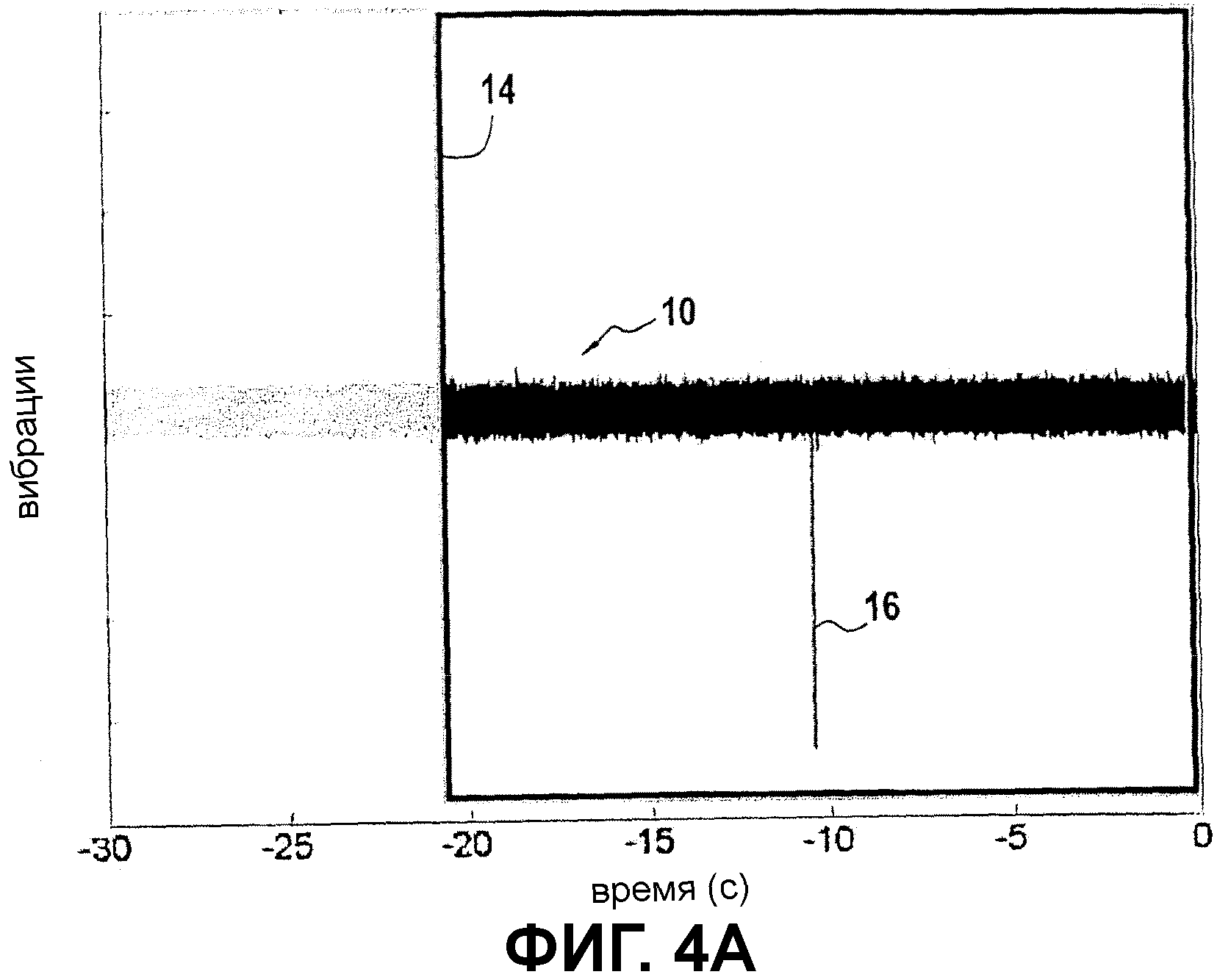
В случае превышения порога пиком амплитуды электронное вычислительное устройство EMU дает команду на сохранение в памяти одновременно временного окна, предшествующего выходу за пределы порога, и окна, следующего сразу за переходом порога. Так, как показано на фиг.4А и 4Б, временное окно 14, центрованное по пику амплитуды (соответственно 16 и 18), сохраняют в памяти (продолжительность этого окна составляет, например, приблизительно 20 секунд).
На фиг.4А и 4Б показаны два разных типа превышения порога: пик амплитуды на фиг.4А характеризует электронное возмущение сигнала (например, связанное с помехами от других электронных компонентов), тогда как пики амплитуды на фиг.4Б характеризуют попадание предмета в турбореактивный двигатель (постороннего предмета или детали, отделившейся от турбореактивного двигателя).
Описанный ниже этап анализа позволяет различать эти два типа событий.
Можно использовать (альтернативно или один за другим) два метода, чтобы отличить механический удар, которому подвергся ротор, от простого электронного возмущения сигнала (в этом случае говорят также “outlier” для аберрантного наблюдения). Эти методы применяют при помощи вычислительных средств электронного вычислительного устройства EMU.
Один из методов состоит в автоматическом исследовании симметрии пика амплитуды относительно оси симметрии наблюдаемого сигнала. Действительно, различные испытания позволили установить, что механический удар, которому подвергся ротор турбореактивного двигателя, как правило, приводит к, по существу, симметричному пику амплитуды, что далеко не всегда происходит при электронном возмущении сигнала.
Исследование симметрии пика амплитуды может, например, состоять в проверке соблюдения следующего условия:
 ,
,
где «М» является максимальным положительным значением, которое принимает пик амплитуды, «m» является минимальным отрицательным значением пика амплитуды, и «с» является параметром, заранее определенным конструктором двигателя.
Если вышеуказанное условие соблюдено, считают, что переход порога пиком амплитуды, вероятно, не связан с электронным возмущением сигнала.
Разумеется, можно предусмотреть оценку других условий, позволяющих автоматически определить, является пик амплитуды симметричным или нет.
Другой метод, позволяющий отличить механический удар, которому подвергся ротор, от простого электронного возмущения сигнала, состоит в определении наличия ослабления сигнала после пика амплитуды. Действительно, сигнал, характерный для механического удара, которому подвергся ротор, будет всегда содержать ослабление после пика амплитуды, тогда как электронное возмущение сигнала такого ослабления не показывает.
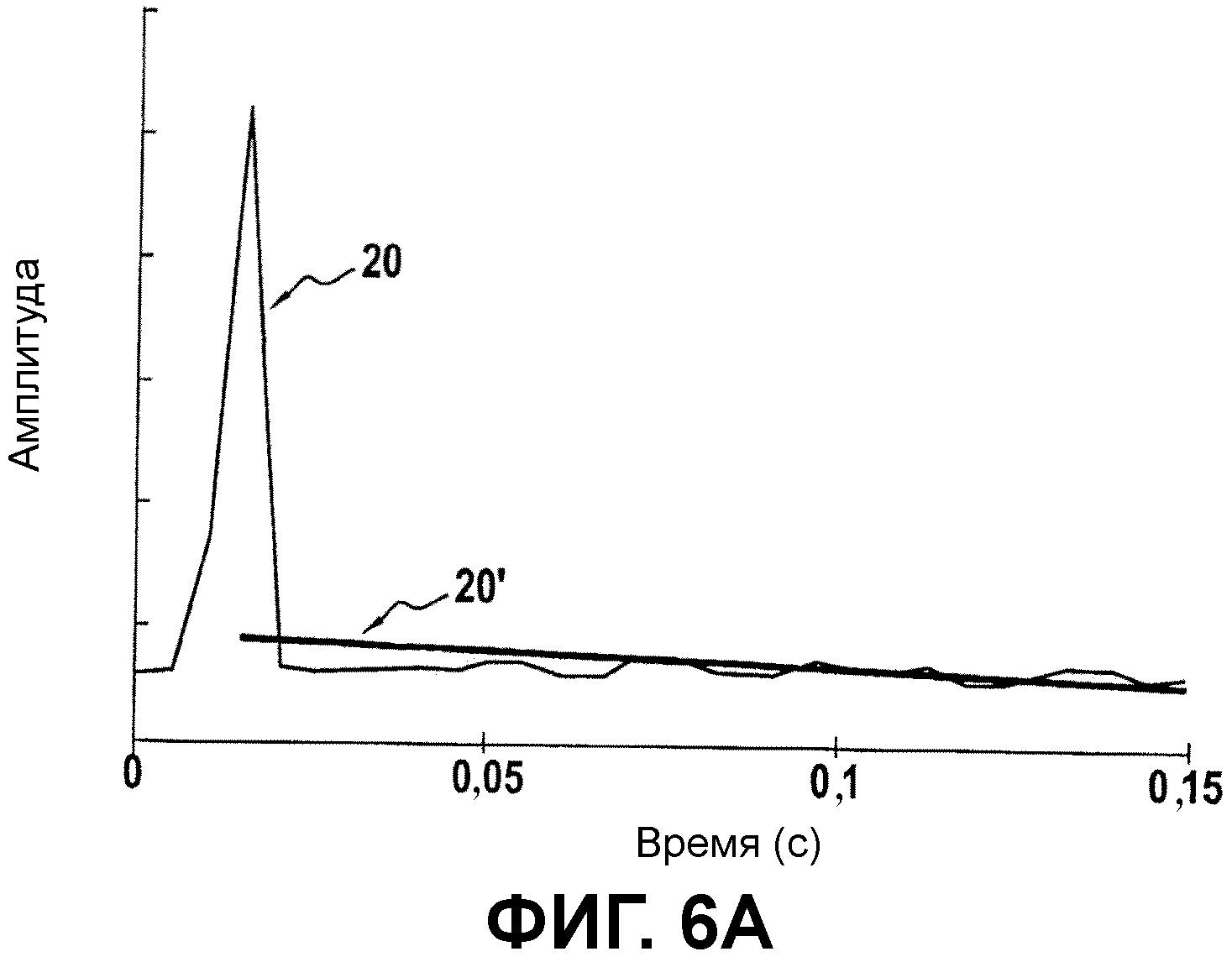
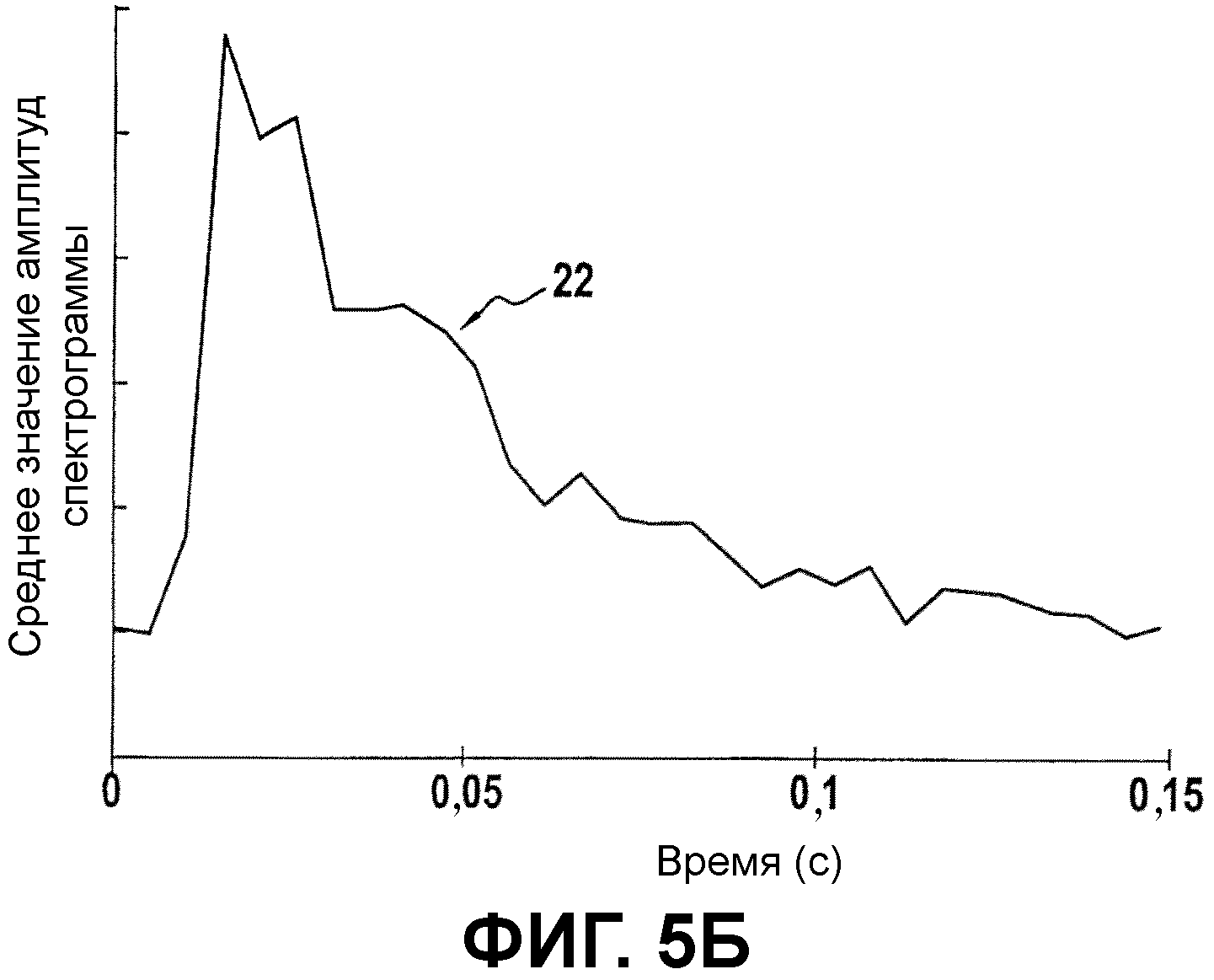
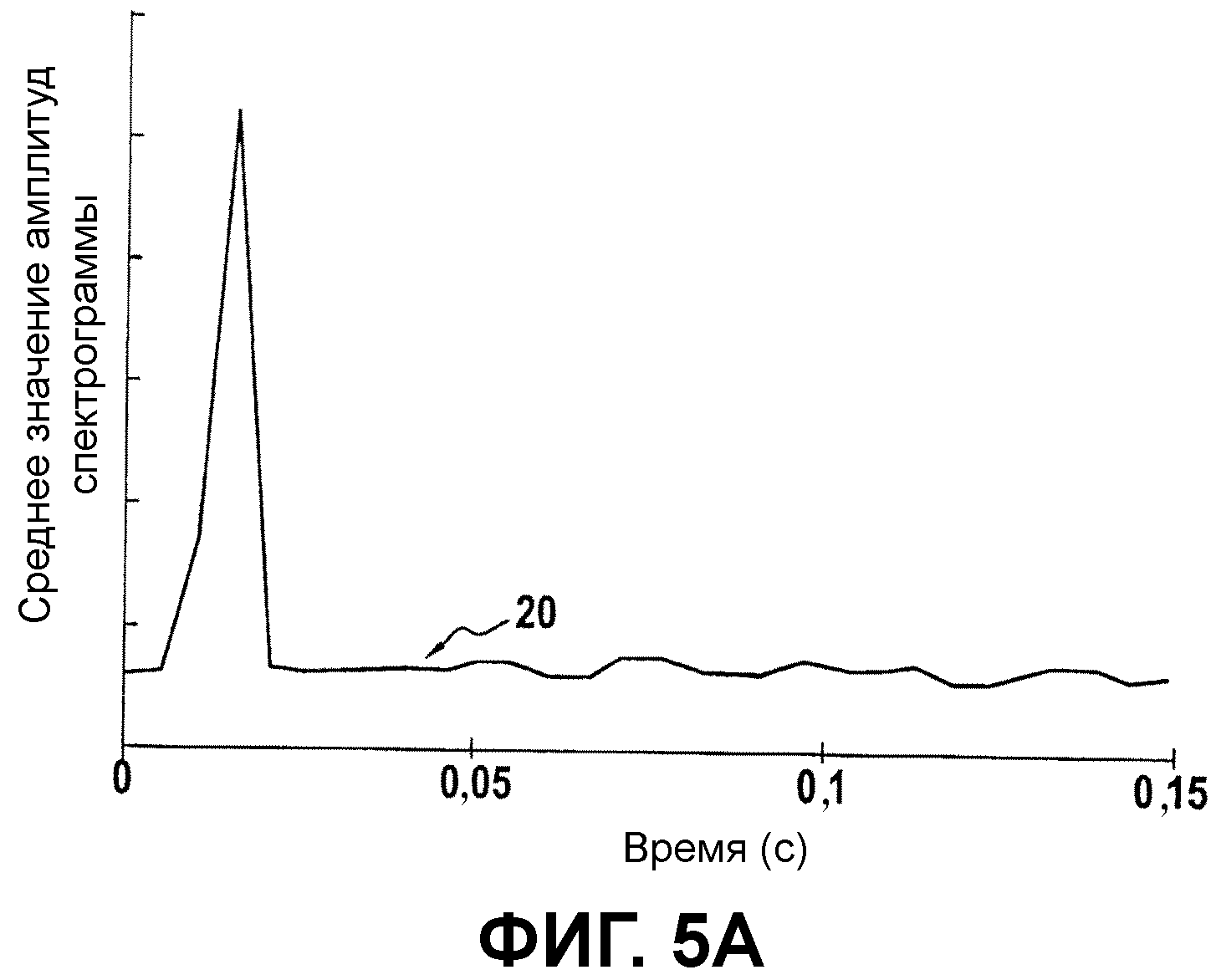
Для этого производят оценку моделирования понижения сигнала после пика амплитуды на основании спектрограммы сигнала, зарегистрированной во временном окне (на фигурах не показана). После этого вычисляют среднее значение амплитуд этой спектрограммы в каждый момент, что позволяет получить кривые 20, 22, показанные на фиг.5А и 5Б, соответственно для электронного возмущения сигнала и для механического удара, которому подвергся ротор.
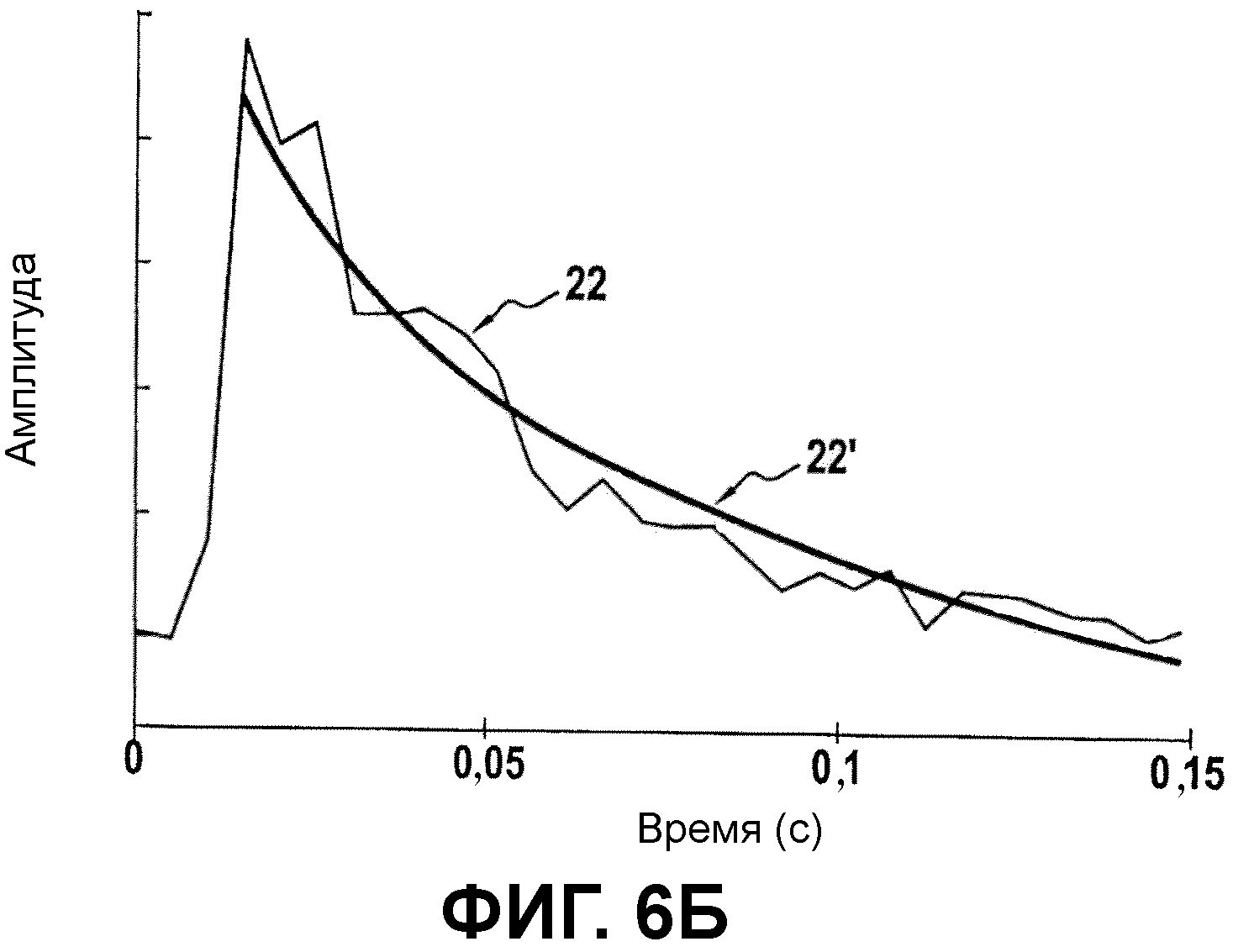
Затем анализируют сходство между кривой Х (Х представляет собой кривую 20 или 22) и функцией экспоненциального типа, характеризующей ослабленный удар. Для этого, предположив, что при помощи убывающей экспоненциальной функции типа Y=A.e-t/τ можно произвести аппроксимацию кривой 20, 22, определяют коэффициенты «а» и «b», при которых прямая In(Y)=In(A)+(-1/τ)×t=a+b×t характеризует хорошую линейную аппроксимацию в направлении наименьших квадратов кривой In(X). На Фиг.6А и 6Б прямые 20', 22' соответствуют линейной аппроксимации в направлении наименьших квадратов соответственно для электронного возмущения сигнала и для механического удара, которому подвергся ротор.
Во время вычисления линейной аппроксимации при помощи метода наименьших квадратов коэффициент определения прямой регрессии является измерением сходства кривой Х с экспоненциальной кривой: минимальный порог на коэффициенте определения позволяет решить, является ли кривая Х достаточной близкой к экспоненциальной кривой, то есть в достаточной ли степени сигнал отображает механический удар.
Согласно предпочтительному отличительному признаку изобретения, после определения механического удара, которому подвергся ротор турбореактивного двигателя, способ дополнительно состоит в определении, появился ли на роторе дисбаланс в результате этого удара. Такой дисбаланс может быть связан с частичной или полной потерей одной или нескольких лопаток, столкнувшихся с попавшим внутрь предметом. Речь может также идти об образовании выемок на этих лопатках.
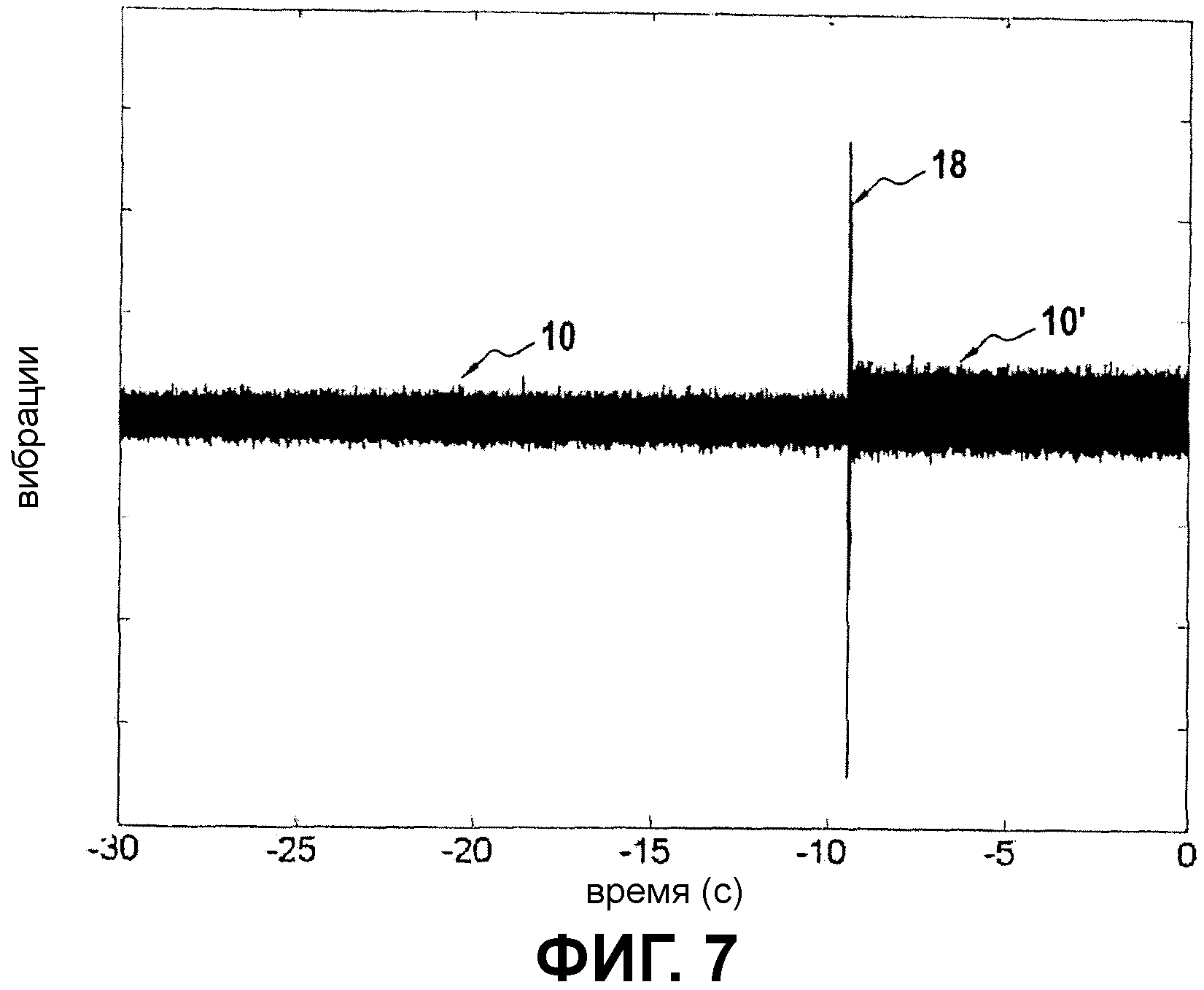
На фиг.7 показан временной сигнал 10, характерный для появления дисбаланса на роторе турбореактивного двигателя вследствие механического удара. Как видно из этой фигуры, форма сигнала 10' после пика амплитуды 18 в результате механического удара по ротору отличается от формы сигнала 10 до пика амплитуды.
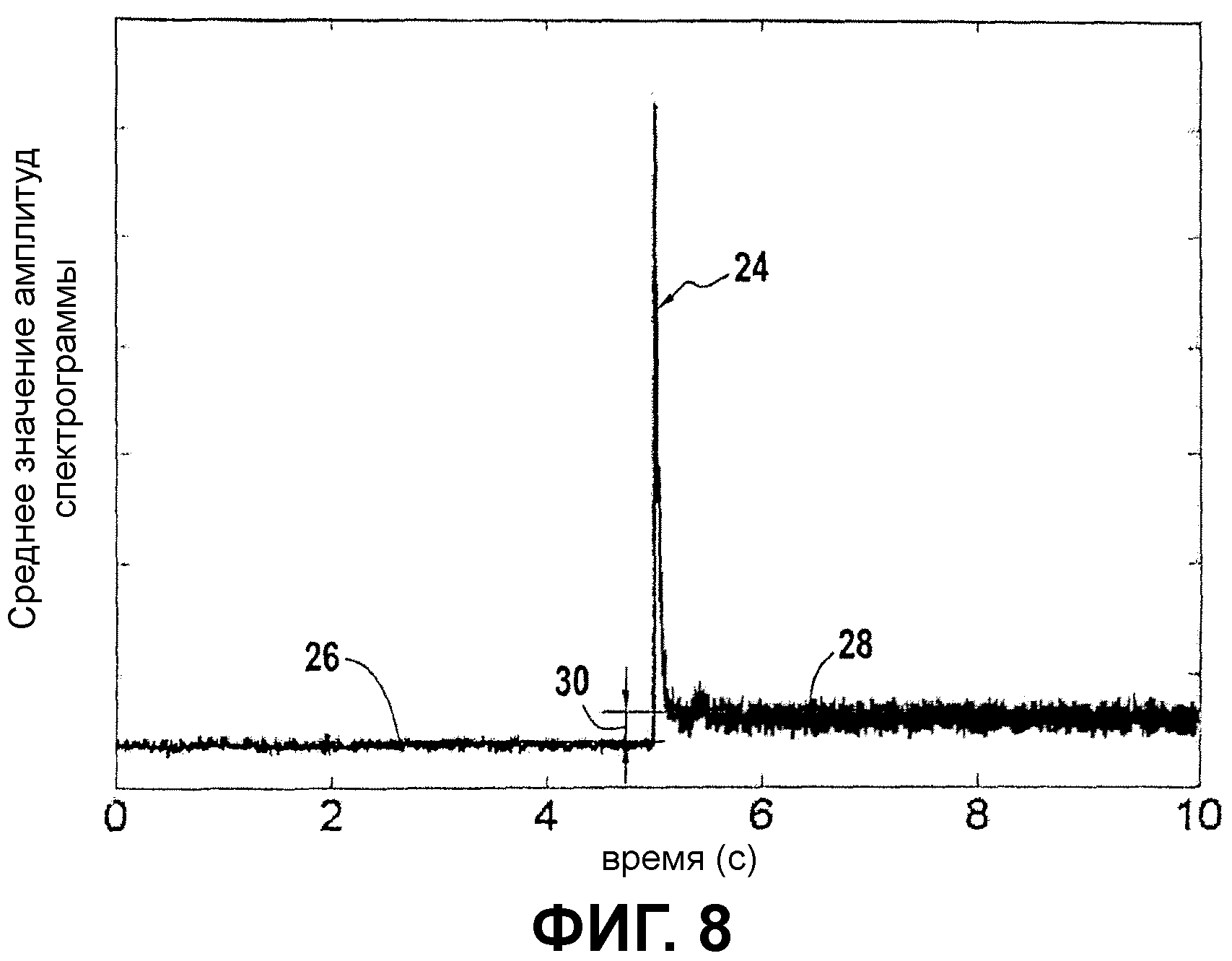
Например, метод автоматического определения появления дисбаланса состоит в выполнении спектрограммы вибрационного сигнала во временном окне, центрованном по пику амплитуды 18. После этого вычисляют среднее значение амплитуд этой спектрограммы в каждый момент, что позволяет получить кривую 24, показанную на фиг.8.
Среднее значение амплитуды точек кривой 24 (называемое также уровнем среднего значения) вычисляют после и до пика амплитуды 18. Эти средние значения дают две линии 26 и 28, показанные на фиг.8, соответственно для участка кривой до пика амплитуды и для участка кривой после пика амплитуды.
Разность 30 между этими двумя уровнями вычисляют и сравнивают с заранее определенным порогом уровня. Если разность выходит за пределы порога уровня, можно считать, что на роторе турбореактивного двигателя в результате механического удара появился дисбаланс, и эту информацию можно добавить в сообщение обслуживания, передаваемое для предупреждения о наличии повреждений FOD или DOD.
Как в случае вибрационного порога, порог уровня, используемый для определения появления дисбаланса, оценивают на основании вибрационных данных, снятых на одном или нескольких турбореактивных двигателях, принадлежащих к одному и тому же классу или к нескольким разным классам, во время испытаний, производимых на земле или в полете.
Выступающая часть промежуточного корпуса, предназначенная для авиационного реактивного двигателя, содержащая разделенную на секторы кольцевую канавку для вмещения крышек гондолы
Прокладка для лопатки турбины, конструкция ротора турбины и турбина
Приводное устройство, его применение для открытия и закрытия створок в газотурбинном двигателе и турбореактивный двигатель
Клапан разгрузки в газотурбинном двигателе и газотурбинный двигатель
Устройство для контроля тангенциальных ячеек роторного диска
Статор турбины для газотурбинного двигателя летательного аппарата, содержащий устройство для амортизации вибраций
Ступица в сборе выпускного картера, выпускной картер, турбина и турбомашина
Устройство соединения двух вращающихся валов, в частности, в газотурбинном двигателе, и газотурбинный двигатель
Камера сгорания с оптимизированным разбавлением и турбомашина, снабженная такой камерой сгорания
Шпоночная фреза для механической обработки с большой подачей и малой глубиной прохода и способ фрезерования детали указанной фрезой
Выступающая часть промежуточного корпуса, предназначенная для авиационного реактивного двигателя, содержащая разделенную на секторы кольцевую канавку для вмещения крышек гондолы
Прокладка для лопатки турбины, конструкция ротора турбины и турбина
Приводное устройство, его применение для открытия и закрытия створок в газотурбинном двигателе и турбореактивный двигатель
Клапан разгрузки в газотурбинном двигателе и газотурбинный двигатель
Устройство для контроля тангенциальных ячеек роторного диска
Статор турбины для газотурбинного двигателя летательного аппарата, содержащий устройство для амортизации вибраций
Ступица в сборе выпускного картера, выпускной картер, турбина и турбомашина
Устройство соединения двух вращающихся валов, в частности, в газотурбинном двигателе, и газотурбинный двигатель
Камера сгорания с оптимизированным разбавлением и турбомашина, снабженная такой камерой сгорания
Шпоночная фреза для механической обработки с большой подачей и малой глубиной прохода и способ фрезерования детали указанной фрезой

