Результат интеллектуальной деятельности: ПОДЪЕМНОЕ УСТРОЙСТВО С ДВУМЯ ЦЕПЯМИ
Вид РИД
Изобретение
Длинномерные грузы или грузы, имеющие тенденцию к выгибанию, невозможно поднимать, используя единственный крюк и стропы. Такие грузы требуют применения подъемной балки, на которой закреплены стропы или другие средства подвешивания груза. Такой способ широко применяется, но имеет недостаток, заключающийся в том, что при изменении габаритов груза одну подъемную балку приходится заменять на другую.
Альтернативно, известны также подъемные устройства (подъемники или полиспасты), выполненные в форме так называемых подъемных устройств с двумя цепями, в которых на подъемной балке подвешены два цепных подъемных механизма. Эти два подъемных механизма обычно приводятся в действие одним приводным двигателем, чтобы обеспечить синхронизацию.
Недостатком таких цепных подъемников является фиксированное расстояние между крюками, которое может быть слишком мало или слишком велико. Для адаптации таких подъемных устройств к габаритам груза вновь требуется использовать подъемные балки на высоте крюков или растяжки для увеличения или уменьшения расстояния между крюками в соответствии с габаритами груза.
Другой недостаток таких подъемных устройств с двумя цепями обусловлен остаточной длиной, т.е. наименьшим расстоянием, на котором могут находиться крюки от здания или стены, когда подъемное устройство с двумя цепями перемещается в направлении такой стены. Остаточная длина существенно возрастает, если крюки стягиваются один к другому соответствующими средствами.
В свете вышеизложенных обстоятельств настоящее изобретение направлено на создание подъемного устройства с двумя цепями, в котором указанное выше расстояние может меняться, а остальная длина остается постоянной.
Согласно настоящему изобретению эта цель достигается с помощью подъемного устройства с двумя цепями в соответствии с отличительными признаками п.1 формулы изобретения.
Новое подъемное устройство с двумя цепями оснащено подъемной балкой, регулируемой по длине. Подъемная балка содержит первую и вторую секции подъемной балки, которые могут телескопически перемещаться относительно друг друга. Каждая секция подъемной балки или телескопическая секция подъемной балки имеет дистальный, или дальний, конец и проксимальный (ближний) конец, или конец, обращенный к другой секции подъемной балки.
Первая группа цепных колес, состоящая из двух соосных цепных колес, соединенных друг с другом без возможности проворота, установлена рядом с дальним концом первой секции подъемной балки. Кроме того, первая секция подъемной балки снабжена анкером грузоподъемной цепи, расположенным рядом с первой группой цепных колес, а также анкером регулировочной цепи. К первой секции подъемной балки также относится и первый крюкоблок. Вторая секция подъемной балки оснащена второй группой цепных колес, оси которых параллельны осям первой группы цепных колес. Вторая группа цепных колес также содержит два соосно расположенных цепных колеса, соединенных без возможности проворота. Эта вторая группа цепных колес расположена на дистальном, или дальнем, конце второй секции подъемной балки. Вторая секция подъемной балки дополнительно содержит два отклоняющих цепных колеса с параллельными осями, которые предназначены для одной из грузоподъемных цепей, на которой подвешен второй крюкоблок. Другое отклоняющее цепное колесо для регулировочной цепи расположено на ближнем или внутреннем конце второй секции подъемной балки.
Каждый крюкоблок подвешен на отдельной грузоподъемной цепи. Первая грузоподъемная цепь проходит от первой группы цепных колес для первого крюкоблока, и от него - к анкеру грузоподъемной цепи на первой секции подъемной балки. Другая грузоподъемная цепь проходит от первой группы цепных колес до цепных колес с параллельными осями на второй секции подъемной балки, затем к крюкоблоку и, наконец, от крюкоблока к второй группе цепных колес на дальнем конце второй секции подъемной балки через другое цепное колесо этой отклоняющей группы.
Регулировочная цепь проходит вокруг еще не занятого цепного колеса второй группы цепных колес и вокруг отклоняющего цепного колеса на ближнем конце второй секции подъемной балки. Оба ее свободных конца закреплены на анкере регулировочной цепи первой секции подъемной балки.
Поскольку две секции подъемной балки можно телескопически регулировать, крюкоблоки можно сдвигать или раздвигать относительно друг друга, в зависимости от данного варианта применения. Следовательно, можно задавать любое расстояние между крюками в возможном диапазоне регулировки. Такая регулировка осуществляется приведением во вращение второй группы цепных колес. Это приводит к тому, что две секции подъемной балки перемещаются относительно друг друга. Одновременно вторая грузоподъемная цепь эффективно укорачивается в соответствии с этим телескопическим движением. Следовательно, вторая группа цепных колес в своем положении образует виртуальный анкер для второй грузоподъемной цепи, который поднимает или отпускает цепь в соответствии с регулировкой для удержания второго крюкоблока на той же высоте, на которой он находился до регулировки, независимо от настройки этого второго крюкоблока. Оба крюкоблока обычно находятся на одинаковой высоте. В некоторых случаях, однако, может потребоваться отрегулировать их высоту относительно друг друга, и регулировка длины подъемной балки не оказывает влияния на такую регулировку высоты крюкоблоков.
Более пристальное изучение сил показывает, что сила на второй грузоподъемной цепи в точности такая же, как и на регулировочной цепи. Однако обе силы на этих цепях имеют противоположные знаки, так что в итоге на вторую группу цепных колес практически не действует крутящий момент, направленный наружу. Следовательно, регулировку длины подъемной балки можно осуществлять приводом, генерирующим значительно меньший крутящий момент, чем привод для первой группы цепных колес.
Цепные колеса первой группы и цепные колеса второй группы могут иметь одинаковое количество цепных гнезд.
Целесообразно, чтобы цепные колеса в группе цепных колес имели одинаковое количество цепных гнезд так, чтобы цепь, или соответствующие отрезок цепи, которая движется по соответствующей группе цепных колес, двигалась с одинаковой скоростью.
Для того чтобы ненагруженные участки грузоподъемных цепей не запутывались, целесообразно рядом с первой группой цепных колес предусмотреть два цепных магазина.
Каждая секция подъемной балки может быть снабжена ходовым механизмом, расположенным рядом с ее дальним концом так, чтобы подъемное устройство с двумя цепями можно было перемещать по ходовому рельсу. Ходовой рельс может состоять из моста мостового крана.
По меньшей мере один из ходовых механизмов может быть оснащен двигателем. Если это допустимо, целесообразно использовать двигатель только в одном ходовом механизме, так чтобы регулировка длины подъемной балки не нарушалась соответствующим двигателем ходового механизма.
Для фиксации регулировки вторая группа цепных колес предпочтительно снабжена тормозным механизмом. Если для привода второй группы цепных колес используется обычный привод, также применяемый для привода подъемных шестерен цепного подъемного устройства, тормозной механизм уже конструктивно интегрирован в систему привода.
Дополнительные признаки настоящего изобретения являются объектами зависимых пунктов формулы. Нижеследующее описание со ссылками на чертежи разъясняет признаки для более глубокого понимания изобретения, благодаря чему специалист из чертежей может легко сделать заключение о деталях, не охваченных в описании, но которые дополняют описание. Следует понимать, что возможны различные изменения и комбинации.
Приложенные чертежи необязательно выполнены в масштабе. Некоторые участки могут быть показаны в преувеличенном размере, чтобы выделить детали, благодаря чему чертежи сильно упрощены и не содержат всего, что может потребоваться для практической реализации. Термины "верх" и "низ", или "передняя сторона" и "задняя сторона", а также "левый" и "правый" соответственно относятся к нормальному положению при использовании и соответствуют терминологии, принятой для подъемных устройств.
На чертежах показан один вариант объекта настоящего изобретения.
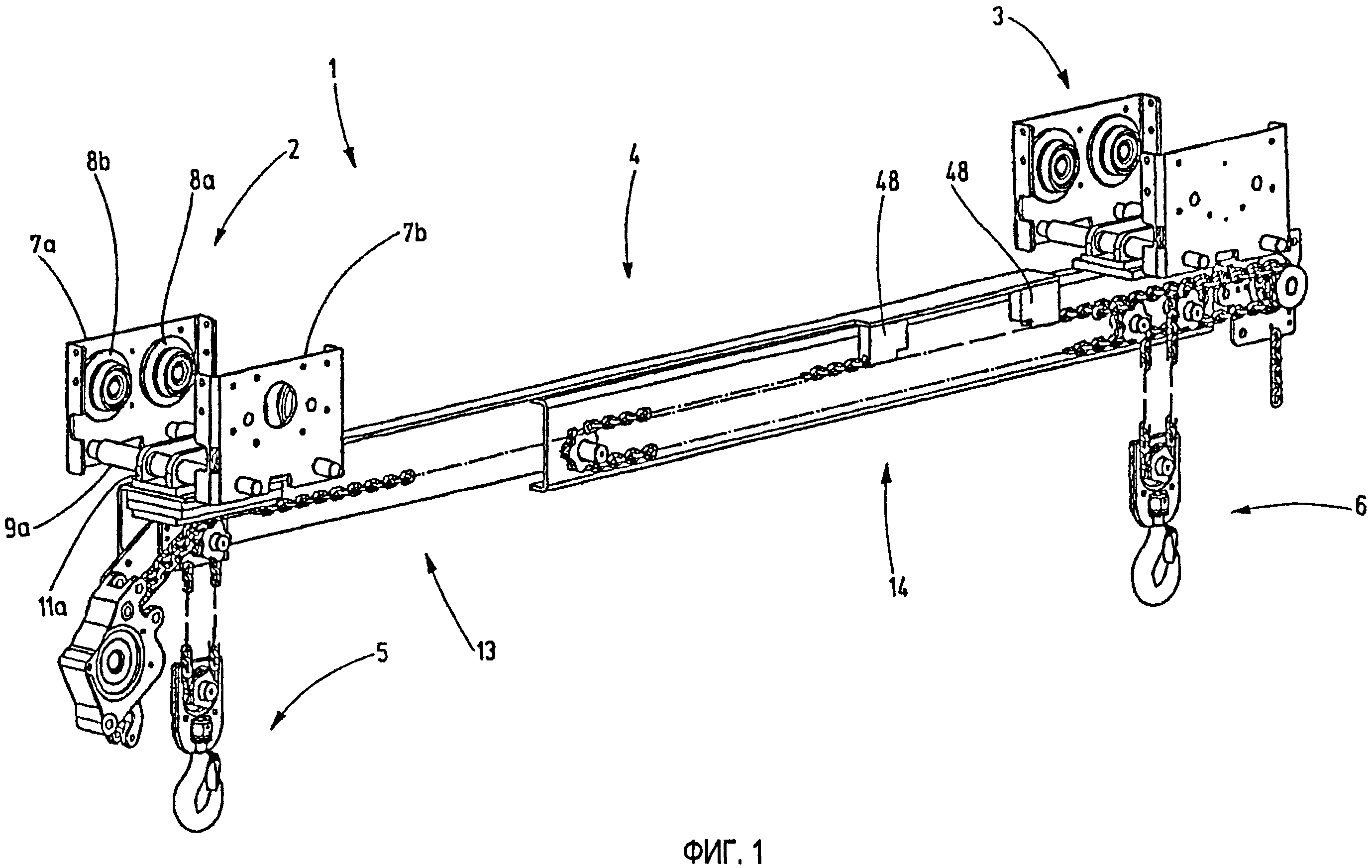
Фиг.1 - упрощенный вид в перспективе с частичным сечением подъемного устройства с двумя цепями по настоящему изобретению.
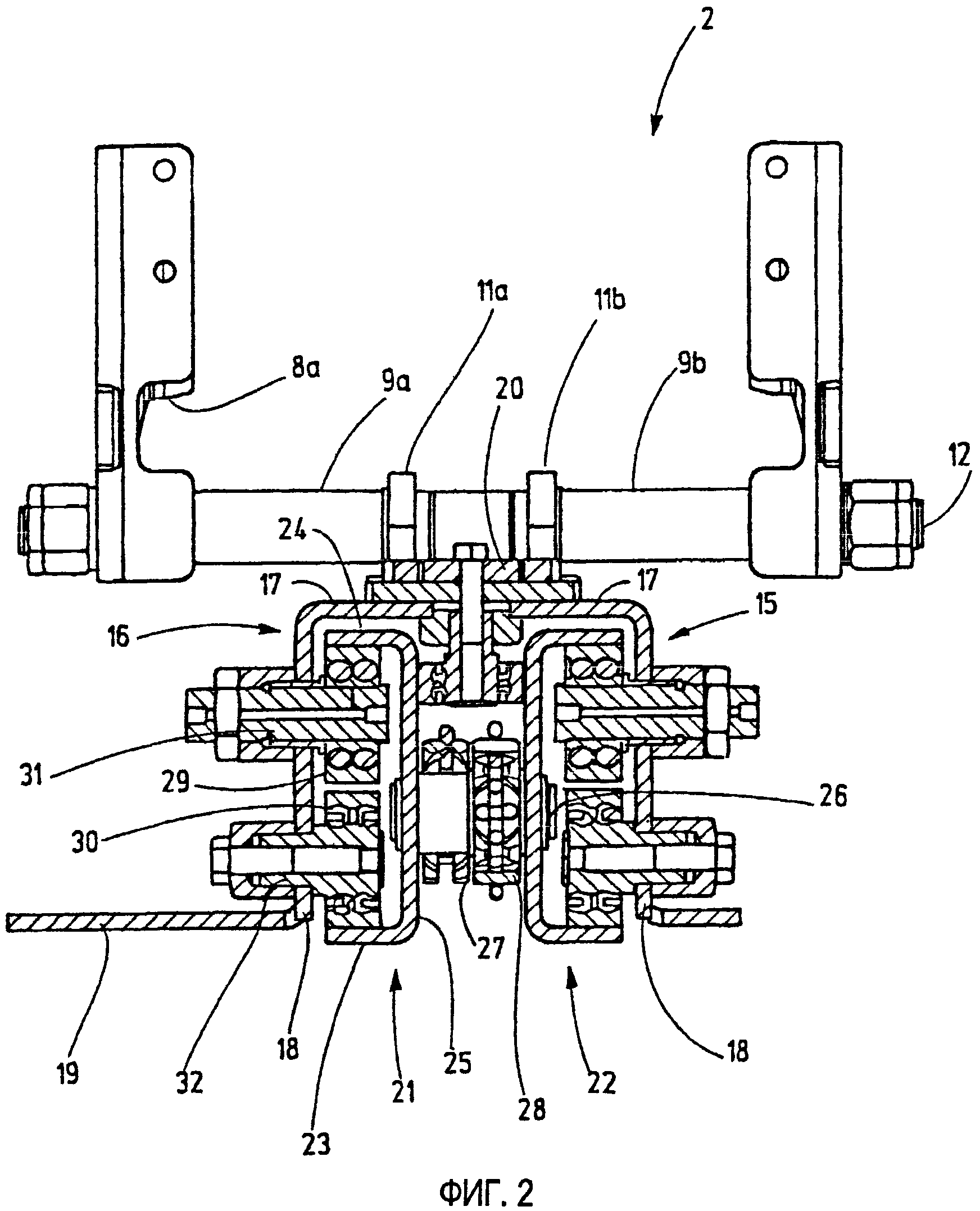
Фиг.2 - сечение конструкции подъемной балки подъемного устройства с двумя цепями по фиг.1.
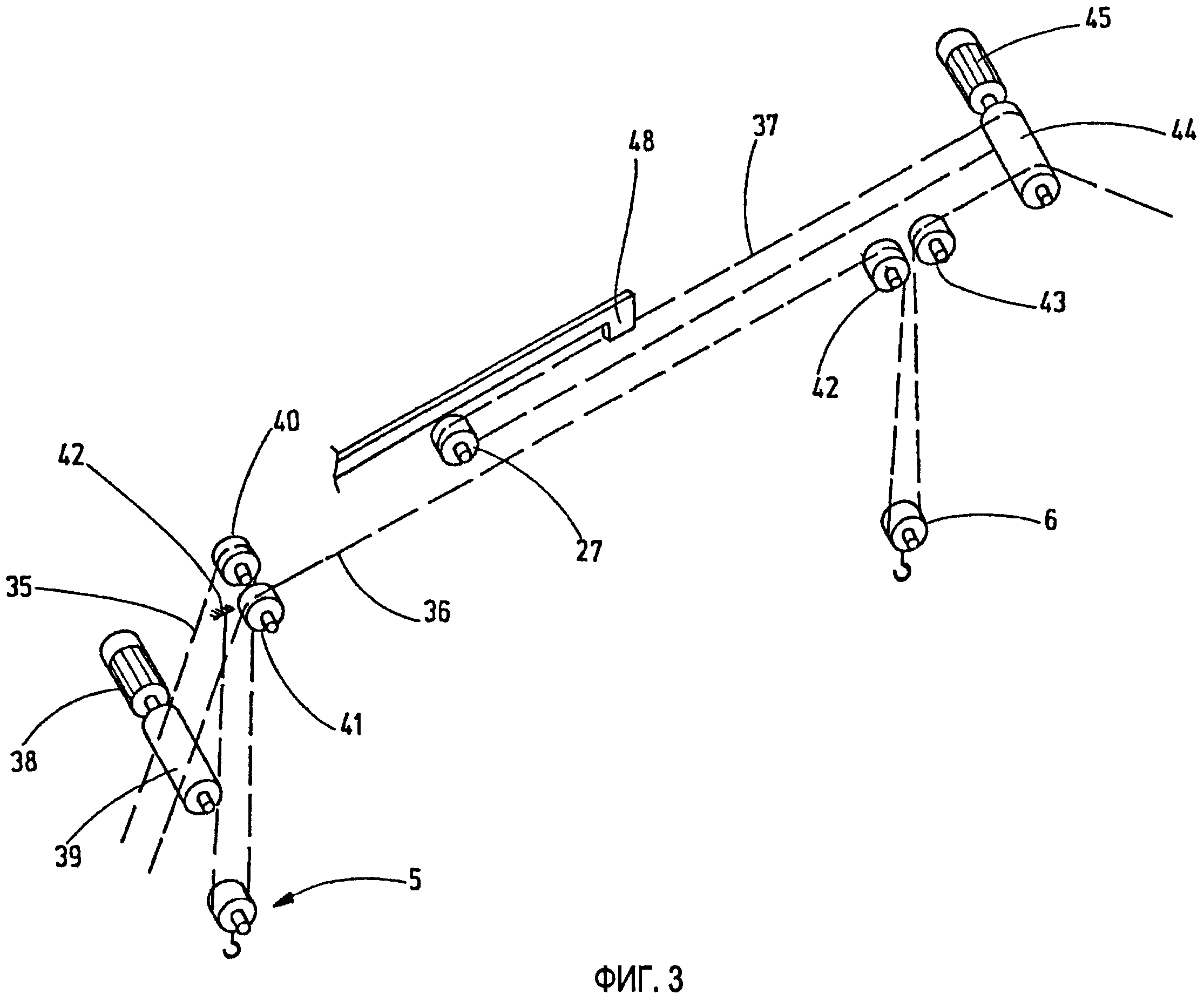
Фиг.3 - схематическая иллюстрация прохождения отдельных цепей по цепным колесам и отклоняющим колесам.
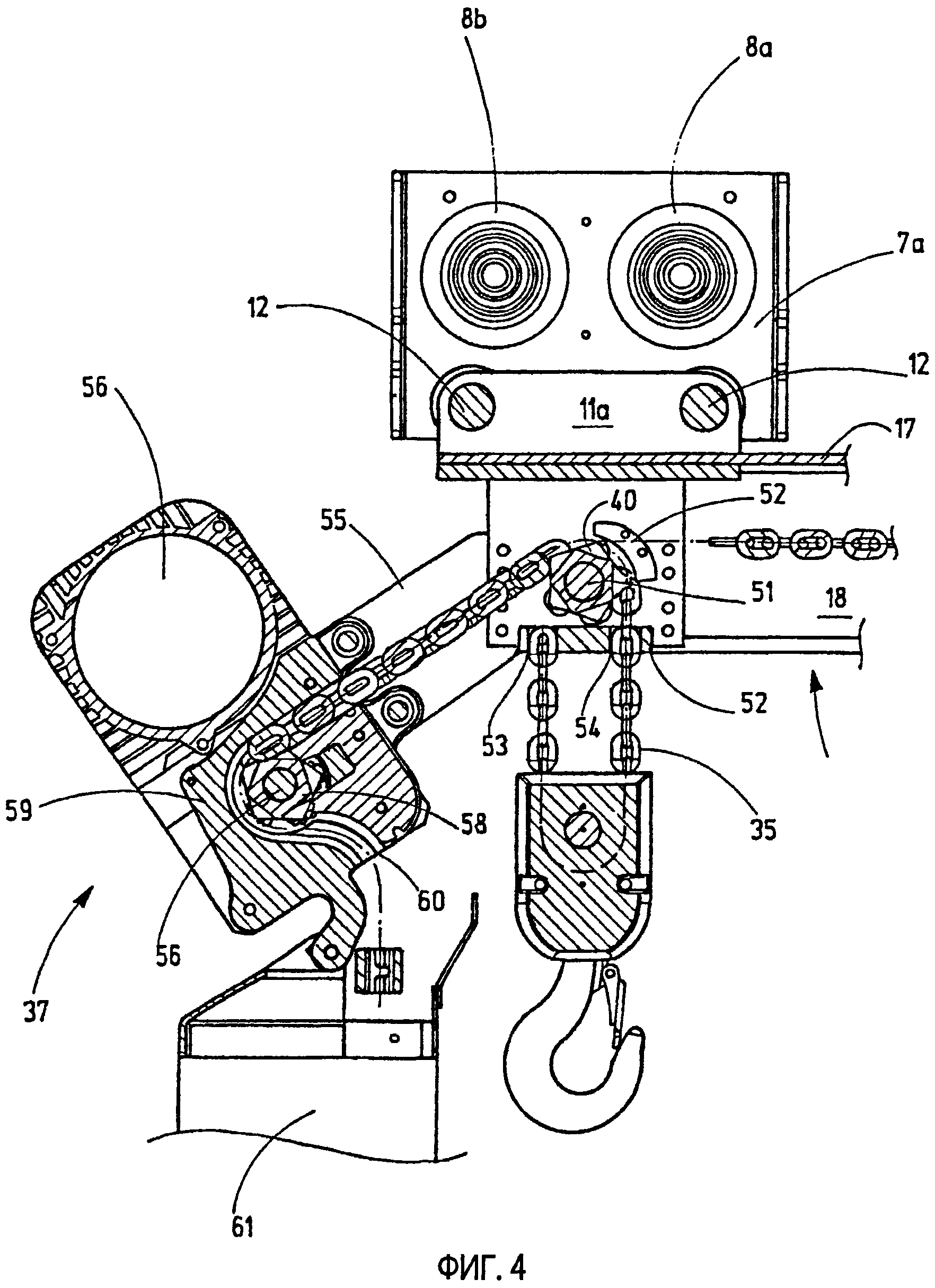
Фиг.4 - вид сбоку в сечении левого конца подъемного устройства с двумя цепями по фиг.1.
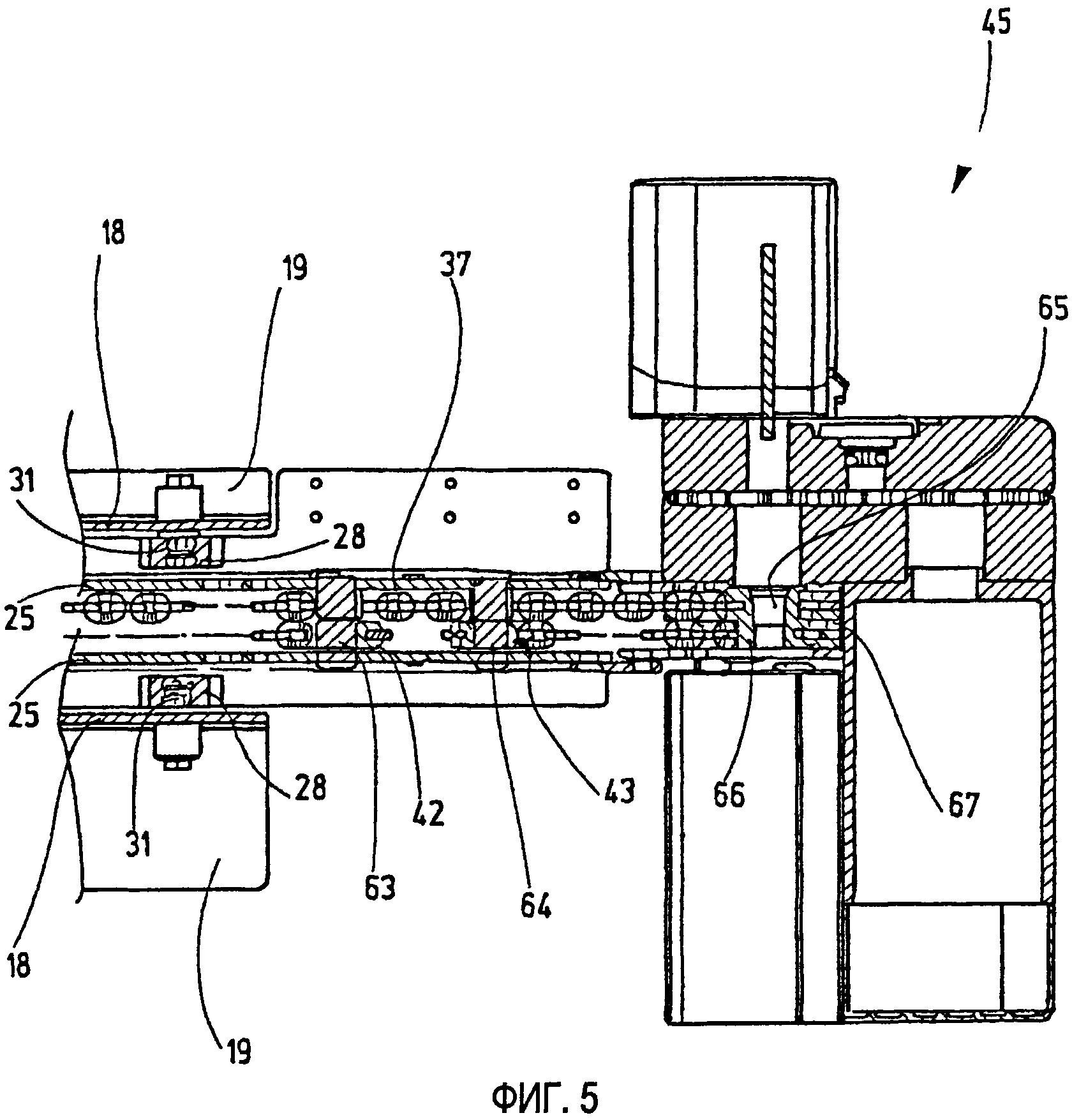
Фиг.5 - вид сверху правого конца подъемного устройства с двумя цепями по фиг.1.
На фиг.1 показано подъемное устройство 1 с двумя цепями. Подъемное устройство 1 с двумя цепями содержит основные узлы в форме двух ходовых механизмов 2, 3, подъемная балка 4, регулируемая по длине, и два крюкоблока 5, 6 с установленными на них крюками.
Как показано на фиг.1 и 2, ходовой механизм 2 содержит две боковины 7а, 7b тележки, установленные параллельно друг другу. На боковине 7а тележки закреплены два установленных с возможностью вращения и снабженных ребордами колеса 8а и 8b. Соответствующие колеса с ребордами установлены на противоположно внутренней стороне боковины 7b тележки в форме зеркального отображения колес 8а, 8b.
Проходящие насквозь болты 12 используются для свинчивания двух боковин 7а и 7b тележки с соответствующим кронштейном 11а и 11b через прокладочные элементы 9а и 9b. На каждом ходовом механизме две боковины 7а и 7b установлены на подъемной балке 7 двумя такими наборами прокладочных элементов 9а и 9b и болтов 12.
Конструкция ходового механизма 3 соответствует конструкции ходового механизма 2 и поэтому не требует описания.
Один из двух ходовых механизмов 2, 3 далее снабжен приводным двигателем для приведения во вращение одного или обоих колес 8а, 8b с ребордами и тем самым перемещать подъемное устройство 1 с двумя цепями по мосту крана.
Подъемная балка 4 состоит из двух секций 13 и 14 подъемной балки, которые можно телескопически регулировать относительно друг друга в продольном направлении.
Как показано на фиг.2, секция 13 подъемной балки имеет две Z-образные секции 15, 16 рельса, которые соответственно состоят из короткой полки или фланца 17, центрального участка 18 и направленной наружу полки или фланца 19. Z-образные секции 15, 16 рельса расположены так, чтобы сформировать перевернутый U-образный профиль. Они соединены друг с другом соответствующими монтажными пластинами 20 на участке ходового механизма 2, т.е. на участке коротких полок 17, которые обращены друг к другу и проходят горизонтально. Эти две Z-образные секции 15, 16 рельса расположены параллельно друг другу с постоянным расстоянием между ними. Нижние фланцы 17, 19 лежат в общей горизонтальной плоскости.
Следовательно, две Z-образные секции 15, 16 профилированного рельса соединены посредством ходового механизма 2 на одном конце и посредством пластины, которая соответствует пластине 20 на другом конце.
Секция 12 подъемной балки сформирована двумя параллельными U-образными секциями 21, 22 рельса, расположенными на расстоянии друг от друга, как показано на фиг.2.
Каждая U-образная секция 21, 22 рельса состоит из двух параллельных коротких полок 23, 24 и задней части 25. Задние части 25 обращены друг к другу.
На участке ходового механизма 3 U-образные секции 21, 22 рельса соединены так же, как и Z-образные секции 15, 16 рельса. Специалистам известен такой тип соединения, поэтому он не требует более подробного описания на данном этапе.
На конце, дальнем относительно ходового механизма 3, который является проксимальным (ближним) концом подъемного устройства 1 с двумя цепями, две U-образные секции 21, 22 рельса соединены друг с другом осью 26, на которой установлены два цепных колеса 27 и 28 с возможностью свободного вращения. Кроме того, рядом с цепными колесами 27 28 может быть вставлена жесткая соединительная деталь.
Подвижное соединение между секцией 13 подъемной балки и секцией 14 подъемной балки реализовано с помощью групп шарикоподшипников 29, 30 с глубокими дорожками качения, посаженных на жесткие оси 31, 32. Жесткие оси 31, 32 соединены с центральным участком 18 Z-образной секции 16 рельса, как показано на чертежах, и проходят перпендикулярно ему. Два шарикоподшипника 29, 30 с глубокими дорожками качения расположены один поверх другого на внутренней стороне полки 18 на определенном расстоянии так, чтобы примыкать к внутренней стороне короткой полки 23, 24 U-образной секции 21 рельса. Шарикоподшипники с глубокими дорожками качения, которые взаимодействуют с U-образной секцией 22 рельса, также расположены один поверх другого на правой стороне в форме зеркального отображения подшипников 29, 30 с глубокими дорожками качения, расположенными на левой стороне.
Вдоль подъемной балки 4 установлен по меньшей мере один комплект из четырех опорных конструкций описанного типа, выровненный с описанной опорной конструкцией на противоположной стороне между Z-образной секцией 15 и U-образной секцией 23 рельса, а также по меньшей мере еще две группы этого типа на расстоянии от них в направлении ходового механизма 3 так, что секцию 13 подъемной балки можно перемещать продольно относительно секции 14 подъемной балки по всей траектории регулировки с помощью по меньшей мере восьми шарикоподшипников. Секция 14 подъемной балки может перемещаться продольно в имеющей форму канавки полости между двумя Z-образными секциями 15, 16 рельса с помощью описанной опорной конструкции. Это соответственно позволяет увеличивать и уменьшать расстояние между ходовыми механизмами 2, 3, а также расстояние между крюками или крюкоблоками 5, 6, как описано ниже.
На фиг.3 схематически показано, как проходят цепи в подъемном устройстве 1 с двумя цепями, при этом на чертеже показаны только цепные колеса, но не показаны никакие опорные элементы, на которых установлены цепные колеса.
Как показано на фиг.3, подъемное устройство 1 с двумя цепями имеет две грузоподъемные цепи 35, 36, а также регулировочную цепь 37. Все цепи 35, 36 37 состоят из круглых звеньев, имеющих одинаковую геометрию. Две грузоподъемные цепи 35, 36 приводятся в движение приводным двигателем 38, при этом два цепных колеса, которые образуют группу 39 цепных колес, посажены на выходной вал этого редукторного приводного двигателя. Согласно схеме, представленной на фиг.3, цепные колеса, входящие в группу 39 цепных колес, расположены и соединены друг с другом соосно без возможности проворота. Они имеют одинаковое количество цепных гнезд. Группа 39 цепных колес расположена немного ниже подъемной балки 4 из пространственных соображений.
Два свободно вращающихся отклоняющих цепных колеса 40 и 41 установлены с возможностью вращения на секции 13 подъемной балки, т.е. внутри секции 13 подъемной балки и под ходовым механизмом 2. Эти два цепных колеса 40 и 41 расположены соосно, но могут вращаться независимо друг от друга. Грузоподъемная цепь 35, приводимая в движение группой 39 цепных колес, проходит от соответствующего цепного колеса группы 39 цепных колес к отклоняющей звездочке 40, и от нее, вертикально вниз, к крюкоблоку 5. От этого крюкоблока 5 грузоподъемная цепь вновь проходит вверх к секции 13 подъемной балки. Ее свободный конец закреплен на цепном анкере 42 на нижней стороне секции 13 подъемной балки.
Грузоподъемная цепь 36 проходит от другого цепного колеса группы 39 цепных колес через отклоняющее цепное колесо 41 и затем в пространство между двумя U-образными секциям 21 и 22 рельса в секции 14 подъемной балки. Два отклоняющих цепных колеса 42 и 43, оси которых проходят параллельно друг другу, установлены с возможностью вращения на расстоянии друг от друга на секции 14 подъемной балки под ходовым механизмом 3. С отклоняющего цепного колеса 41 грузоподъемная цепь 36 спускается вниз от секции 14 подъемной балки, проходя по отклоняющему колесу 42.
От отклоняющего цепного колеса 42 грузоподъемная цепь 36 проходит к крюкоблоку 6 и вновь поднимается вверх к секции 14 подъемной балки. Внутри секции 14 подъемной балки грузоподъемная цепь 36 проходит от крюкоблока 6 через отклоняющее цепное колесо 43 и другую группу 44 цепных колес, расположенную на другом конце подъемной балки 4. Группа 44 цепных колес содержит два соосно установленных цепных колеса, соединенных друг с другом без возможности проворота. Цепные колеса группы 44 имеют одинаковое количество цепных гнезд. Они предпочтительно имеют такое же количество цепных гнезд, что и цепные колеса группы 39, но это не является абсолютно необходимым. Группа 44 цепных колес расположена рядом с ходовым механизмом 3.
Ненагруженный отрезок грузоподъемной цепи 46, возникающий после группы 44 цепных колес, проходит в цепной магазин, расположенный под ходовым устройством 3.
Грузоподъемная цепь 36 также лежит на свободно вращающемся цепном колесе 28 для минимизации провисания грузоподъемной цепи 36 внутри подъемной балки 4. Цепное колесо 28 не показано на фиг.3, чтобы не усложнять чертеж. Оно расположено на дальнем конце секции 14 подъемной балки между группой 39 цепных колес и отклоняющим цепным колесом 42.
Группа 44 цепных колес посажена на выходной вал редукторного двигателя 45, который снабжен внутренним тормозным механизмом, что является обычной практикой в области подъемных механизмов. Следовательно, тормозной механизм на этом этапе не требует подробного описания.
Когда группа 44 цепных колес остановлена, она работает как анкер для грузоподъемной цепи 36. Две грузоподъемные цепи 35 и 36 синхронно перемещаются по одной и той же регулировочной траектории, при приведении в действие группы 39 цепных колес с помощью редукторного двигателя 38. Поскольку свободные концы обеих грузоподъемных цепей соответственно зафиксированы анкером 42 и группой 44 цепных колес, два крюкоблока 5 и 6 движутся на одинаковое расстояние в одном и том же направлении. Оба крюкоблока 5 и 6 могут генерировать одинаковое усилие.
Один конец регулировочной цепи 37 закреплен на анкере 48, который расположен на дальнем конце секции 13 подъемной балки и выступает между двумя U-образными рельсами 21, 22 секции 14 подъемной балки. От этого анкера 48 грузоподъемная цепь проходит на свободно вращающееся отклоняющее цепное колесо 27, установленное между двумя U-образными рельсами 21, 22 на дальнем конце секции 14 подъемной балки, как показано на фиг. 2. После поворота на 180о вокруг цепного колеса 27 регулировочная цепь 37 проходит по соответствующему цепному колесу группы 44 цепных колес и возвращается на анкер 48.
Независимо от работы грузоподъемной цепи 3 вращение группы 44 цепных колес по часовой стрелке относительно фиг.3 приводит к вытягиванию анкера в направлении группы 44 цепных колес. Поэтому две секции 13, 14 подъемной балки сдвигаются по направлению друг к другу. Вращение группы 44 цепных колес против часовой стрелки, наоборот, вытягивает 48 анкер в направлении отклоняющего цепного колеса 27 так, что расстояние между крюкоблоками 5, 6 увеличивается.
Для более полного описания настоящего изобретения предположим, что подъемное устройство 1 с двумя цепями находится в положении, схематически показанном на фиг.3. Если в этом положении группа 4 цепных колес вращается против часовой стрелки, анкер 48 вытягивается в направлении ходового механизма 3, как описано выше, т.е. крюкоблок 5, расположенный под ходовым механизмом 2 и соединенный с секцией 13 подъемной балки анкером 42 и отклоняющим цепным колесом 40, движется в направлении крюкоблока 6. Участок грузоподъемной цепи 36 между отклоняющим цепным колесом 41 и отклоняющим цепным колесом 42 из-за этого движения становится слишком длинным. Однако поскольку группа 44 цепных колес содержит второе цепное колесо для грузоподъемной цепи 36, эта группа 44 из двух колес выбирает избыточную длину грузоподъемной цепи 36 через подъемную балку и по группе 44 из двух цепных колес в той степени, в которой две секции 13, 14 сближаются друг с другом. Во время регулировки грузоподъемная цепь проходит, как и раньше, через крюкоблок 6, в результате чего крюкоблок 6 в итоге остается на показанной высоте независимо от регулирования расстояния между крюкоблоками 5 и 6. Это также аналогично относится и к движению в противоположном направлении, т.е. между группой 39 цепных колес и выпускающим цепным колесом 42 требуется дополнительная длина грузоподъемной цепи 36, когда секции 13, 14 подъемной балки раздвигаются. Эта дополнительная длина грузоподъемной цепи 36 транспортируется в подъемную балку 4 из соответствующего магазина, расположенного под группой 44 цепных колес, с помощью группы 44 цепных колес, когда включается двигатель 45.
Другими словами, верхний отрезок регулировочной цепи 37 на фиг.3 движется на такое же расстояние и в том же направлении, что и грузоподъемная цепь 36 между отклоняющим цепным колесом 43 и группой 44 цепных колес.
Очевидно, что для выполнения этой функции требуется просто, чтобы группа 44 имела два цепных колеса: одно для регулировочной цепи 37, а второе для грузоподъемной цепи 36. Это оперативное требование может быть выполнено, если эти два цепных колеса имеют одинаковое количество цепных гнезд. Группа 44 цепных колес совершенно необязательно должна соответствовать группе 39 цепных колес в отношении количества цепных гнезд на колесах. Что касается технологии производства, предпочтительно, чтобы обе группы цепных колес были идентичны.
В других отношениях проверка сил показывает, что приводной двигатель 45 может быть значительно менее мощным, чем приводной двигатель 38. Груз, подвешенный на крюкоблоке 6, стремится вытянуть отрезок грузоподъемной цепи 36, расположенный между отклоняющим цепным колесом (43) и группой 44 цепных колес влево (относительно фиг.3) При этом на группе 44 цепных колес возникает момент, направленный против часовой стрелки. Эта сила одновременно стремится сдвинуть две секции 13, 14 подъемной балки друг к другу. Однако благодаря возникшему крутящему моменту эта сила действует в противоположном направлении на регулировочной цепи 37, т.е. крутящий момент группы 44 цепных колес, направленный против часовой стрелки, натягивает нижнюю ветвь регулировочной цепи 37 так, что регулировочная цепь 37 стремится вытянуть анкер 48 от группы 44 цепных колес. Другими словами, продольные силы гасят друг друга в районе колесной группы 44, и это позволяет приводить в движение эту группу цепных колес приводом, который должен быть способен просто генерировать регулировочные силы и создавать небольшой тормозной эффект, чтобы предотвратить нежелательное перемещение из-за асимметрии, вызванной силами трения.
Ниже, исключительно для полноты описания, приводятся некоторые подробности конструкции приводов.
На фиг.4 показан левый конец подъемного устройства 1 с двумя цепями. Показано сечение, параллельное подъемной балки 4 по вертикальной центральной плоскости. Согласно этой иллюстрации, цепное колесо 40 установлено на оси 51, удерживаемой между Z-обрезными рельсами 15 и 16. Внешнее цепное колесо 41 на сечении не видно. Цепное колесо 40 частично окружено направляющим элементом 52, который установлен на полке 18 Z-образного рельса 15.
Направляющая пластина 52 с отверстиями 53 и 54, выровненными ветвями грузоподъемной цепи 35, расположена под цепным колесом 40.
Рычаг 55 проходит влево и наклонен вниз, и на этом рычаге установлен привод 38. Привод 38 содержит приводной двигатель 56, который через редуктор приводит в действие выходной вал 57. Два цепных колеса, относящихся к группе 39, установлены на выходном валу так, что их оси параллельны. Однако, поскольку на чертеже приведено сечение, на нем видно только одно, заднее цепное колесо 58, вокруг которого проходит грузоподъемная цепь 35.
Группа 39 цепных колес окружена корпусом 59, в котором выполнены соответствующие направляющие каналы 59 (д.б. 60) для двух грузоподъемных цепей 35 и 36.
Согласно этому чертежу, направляющий канал 60 грузоподъемной цепи 35 проходит наклонно вниз. Под выходом направляющего канала 60 расположен цепной магазин 61.
Легко представить второй цепной магазин, соответствующий цепному магазину 61, а также цепное колесо группы 39, предназначенное для грузоподъемной цепи 36, расположенное выше плоскости проекции.
Другой конец направляющего канала 60 расположен так, чтобы цепь проходила от цепного колеса 57 к отклоняющему цепному колесу 40 без резкого перегиба.
Свободный конец грузоподъемной цепи 35 закреплен в отверстии 52 пластины 53. Это отверстие одновременно образует анкер 42.
На фиг.5 представлен вид сверху правого конца подъемного устройства 1 с двумя цепями, при этом эта иллюстрация является сечением приблизительно на высоте оси направляющего роликового подшипника 29. Как показано на этом чертеже, два отклоняющих цепных колеса 42 и 43 установлены с возможностью вращения на двух параллельных осях 63 и 64. Грузоподъемная цепь 36 проходит вниз в зазор между этими цепными колесами, перпендикулярно плоскости проекции, а регулировочная цепь 37 проходит вбок мимо двух цепных колес 42 и 43. Приводной двигатель 45 установлен на свободном правом конце. Два цепных колеса 66 и 67, которые образуют группу 44 цепных колес, установлены рядом друг с другом на выходном валу 65 приводного двигателя без возможности проворота.
Подъемное устройство с двумя цепями содержит подъемную балку, выполненную с возможностью сдвигаться и раздвигаться телескопически, в котором грузоподъемные цепи соответственно проходят к крюкоблокам, подвешенным под подъемной балкой рядом с концами двух телескопических секций, которые образуют подъемную балку. Расстояние между телескопическими секциями можно изменять другой цепью. Цепь для изменения длины подъемной балки проходит по цепному колесу, которое соединено без возможности проворота с другим цепным колесом, которое служит анкером для грузоподъемной цепи крюкоблока данной секции телескопической подъемной балки.
Направляющее роликовое устройство для кранов
Тросовый привод с устройством аварийного торможения
Уравновешивающее устройство
Грузоподъемное устройство с регулируемым ходовым механизмом
Устройство соединения рельсового стыка
Направляющее роликовое устройство для кранов
Тросовый привод с устройством аварийного торможения
Уравновешивающее устройство
Грузоподъемное устройство с регулируемым ходовым механизмом

