Результат интеллектуальной деятельности: ПРОТЕЗ КИСТИ
Вид РИД
Изобретение
Изобретение относится к медицинской технике, а именно к протезированию и протезостроению.
Известен протез кисти, использующий модуль каркаса пясти 2В021 («Технология изготовления протезов верхних конечностей», Петров В.Т., Замилацкий Ю.И. и др., СПб, Гиппократ, 2008 г., стр.40, 41), содержащий приемную гильзу, корпус, каркасы первого, блока второго-третьего пальцев, также блока четвертого-пятого пальцев и приводную систему функции подвижности «охват-раскрытие кисти».
Недостатком указанного устройства является то, что каркасы второго-третьего и четвертого-пятого пальцев соединены в два кинематически связанных блока и не имеют независимых активных функций подвижности кроме совместного движения пальцев «схват-раскрытие кисти», что не обеспечивает их самоустановку по поверхности предметов сложной формы. Кроме того, устройство обеспечивает позиционный контроль инвалида-оператора за положением пальцев только при раскрытии пальцев протеза, а именно при натяжении тяги. При этом закрывание схвата осуществляется пассивно с помощью возвратной пружины.
Этих недостатки частично устранены в устройстве протеза кисти, содержащего приемную гильзу, корпус, каркасы первого пальца, блока второго-пятого пальцев и приводную систему функции подвижности «схват-раскрытие кисти», включающую рычажную передачу, шарнир сгибания в лучезапястном сочленении и манжету на предплечье («Конструкция протезно-ортопедических изделий», Кужекин А.П. и др., Легкая и пищевая промышленность, 1984, стр.150). Данный протез кисти обеспечивает реализацию принципа управления с позиционной обратной связью и при раскрытии пальцев протеза кисти и при схвате. Однако недостатком указанного устройства является то, что оно не развивает достаточных усилий при удержании предметов в процессе самообслуживания, а сгибание кисти используется для управления движением пальцев, что затрудняет возможность манипулирования объектом удержания, при этом каркасы второго-пятого пальцев кинематически связаны (соединены в один блок) и не имеют других активных функций кроме совместного движения пальцев «схват-раскрытие кисти», что не обеспечивает их независимую установку по поверхности предметов сложной формы.
Задачей предлагаемого изобретения является создание протеза кисти, развивающего достаточные усилия при самообслуживании, повышающего удобство пользования протезом за счет расширения функциональных возможностей устройства при выполнении инвалидом целенаправленных действий, сокращения, тем самым, времени выполнения двигательных операций при пользовании протезом путем сохранения естественной функции сгибания кисти, надежного удержания объектов манипулирования за счет обеспечения двустороннего позиционно-силового контроля за движением первого и второго пальцев с одновременной самоустановкой третьего и четвертого пальцев по поверхности предметов сложной формы.
Технический результат поставленной задачи достигается тем, что в протез кисти, содержащий приемную гильзу, корпус, каркасы первого пальца, второго-четвертого пальцев, приводную систему функции подвижности «схват-раскрытие кисти», шарнир сгибания в лучезапястном сочленении и манжету на предплечье, введены три потенциометра, три преобразователя сигнала, сумматор, два функциональных преобразователя и четыре усилителя мощности, при этом приводная система выполнена в виде четырех индивидуальных микроэлектроприводов пальцев, неподвижно закрепленных на каркасах первого-четвертого пальцев и соединенных с их исполнительными механизмами, при этом приемная гильза шарнирно закреплена в корпусе с возможностью приведения-отведения, неподвижно соединена с ротором первого потенциометра и шарнирно упруго соединена с подпружиненным рычагом, который соединен со статором первого потенциометра, при этом подпружиненный рычаг посредством шатуна, снабженного сферическими шарнирами соединен с каркасом второго пальца, кроме того первый потенциометр соединен с первым-третьим преобразователями сигнала, каждый из которых соответственно последовательно соединен с первым-третьим усилителями мощности, первым-третьим приводом и исполнительными механизмами второго-четвертого пальцев, причем каркас второго пальца неподвижно соединен с ротором второго потенциометра, статор которого закреплен на корпусе, в свою очередь каркас первого пальца неподвижно соединен с ротором третьего потенциометра, статор которого также закреплен на корпусе устройства, при этом второй и третий потенциометры соединены с сумматором, который соединен с первым и вторым функциональными преобразователями, последовательно соединенными с четвертым усилителем мощности, четвертым приводом и исполнительным механизмом первого пальца, а пятый палец выполнен в виде упругого звена, причем каждый исполнительный механизм первого-четвертого пальцев выполнен в виде червячной передачи, червяк которой неподвижно соединен с выходным валом привода, при этом червячное колесо неподвижно закреплено на корпусе, а каркас пальца шарнирно соединен с осью червячного колеса.
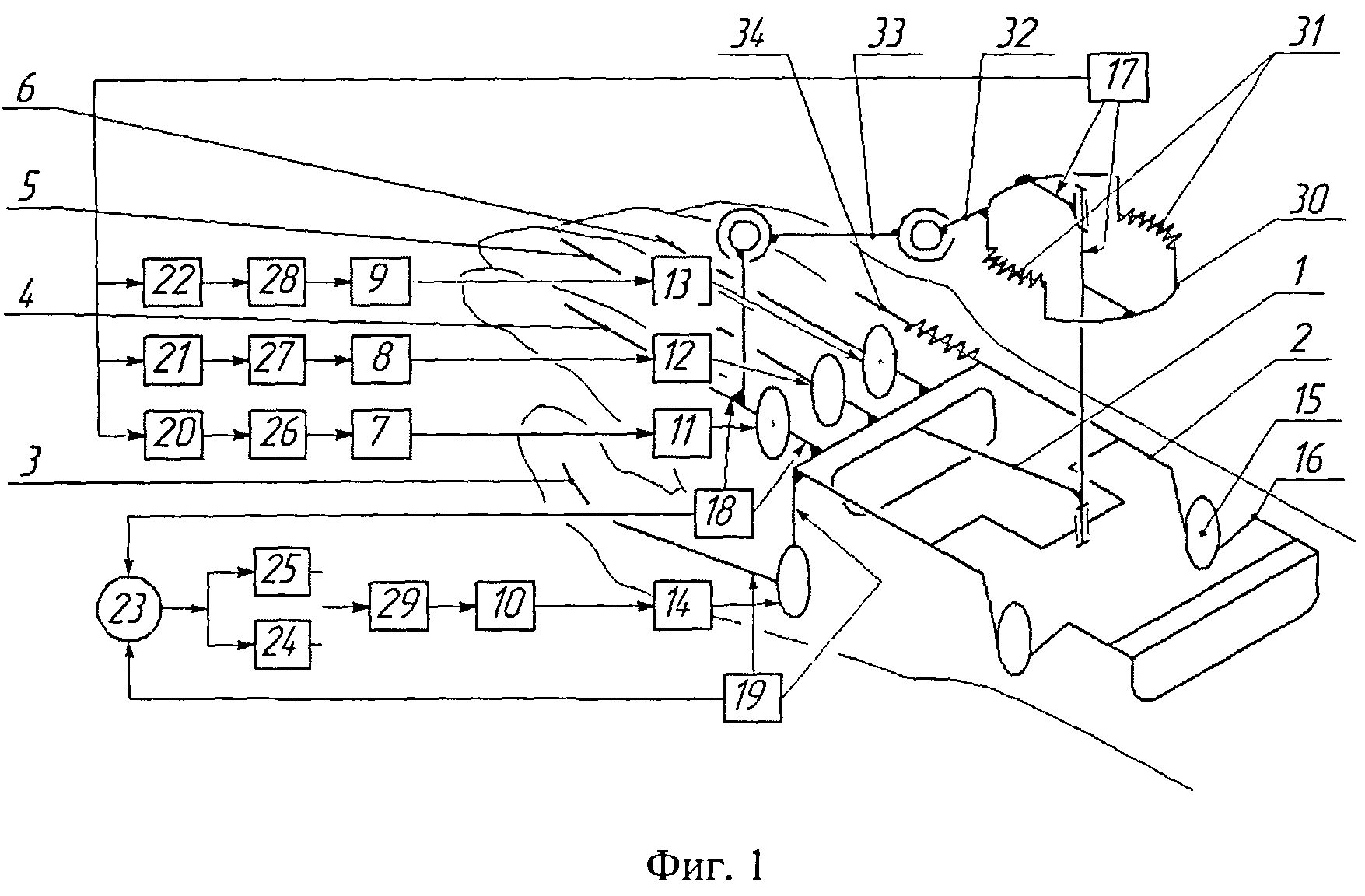
На фигуре 1 представлена структурно-кинематическая схема протеза кисти, на фигуре 2 представлен чертеж исполнительного механизма поворота каркаса пальца.
Многофункциональный активный протез кисти (Фиг.1) содержит приемную гильзу 1, корпус 2, каркасы первого пальца 3, второго-четвертого пальцев 4-6, приводную систему функции подвижности «схват-раскрытие кисти», выполненную в виде четырех индивидуальных микроэлектроприводов 7-10 пальцев, неподвижно закрепленных на каркасах 3-6 первого-четвертого пальцев и соединенных с их исполнительными механизмами 11-14, шарнир сгибания в лучезапястном сочленении 15 и манжету 16 на предплечье, в устройство введены также три потенциометра 17-19, три преобразователя сигнала 20-22, сумматор 23, два функциональных преобразователя 24, 25 и четыре усилителя мощности 26-29, при этом приемная гильза шарнирно закреплена в корпусе с возможностью приведения-отведения и неподвижно соединена с ротором 30 первого потенциометра 17 и шарнирно соединена с подпружиненным посредством пружин 31 рычагом 32, на котором закреплен статор первого потенциометра 17, при этом подпружиненный рычаг посредством шатуна 33, снабженного сферическими шарнирами соединен с каркасом второго пальца 4, кроме того первый потенциометр 17 соединен с первым-третьим преобразователями сигнала 20-22, каждый из которых соответственно последовательно соединен с первым-третьим усилителями мощности 26-28, первым-третьим приводом 7-9 и исполнительными механизмами второго-четвертого пальцев 11-13, кроме того каркас второго пальца 4 неподвижно соединен с ротором второго потенциометра 18, статор которого закреплен на корпусе 2, в свою очередь каркас первого пальца 3 неподвижно соединен с ротором третьего потенциометра 19, статор которого также закреплен на корпусе 2, причем второй и третий потенциометры 18, 19 соединены с сумматором 23, который соединен с первым и вторым функциональными преобразователями 24, 25, которые последовательно соединяются с четвертым усилителем мощности 29, четвертым приводом 10 и исполнительным механизмом первого пальца 14, а пятый палец 34 выполнен в виде упругого звена. При этом каждый из исполнительных механизмов 11-14 выполнен в виде червячной передачи, где червяк неподвижно соединен с выходным валом привода пальца, а червячное колесо неподвижно соединено с корпусом 2. Например (Фиг.2), привод 7 второго пальца неподвижно соединен с каркасом 4 второго пальца, а червяк 35 исполнительного механизма 11 неподвижно соединен с выходным валом 36 привода, при этом червячное колесо 37 неподвижно закреплено на корпусе 2, а каркас пальца шарнирно соединен с осью червячного колеса.
Устройство работает следующим образом.
Инвалид, перемещая культю кисти с закрепленной на ней приемной гильзой 1 совершает отведение или приведение в лучезапястном суставе. Этим он приводит в движение ротор первого потенциометра 17, сжимая в ту или другую сторону пружины 31, при этом рычаг 32 и статор соединенного с ним первого потенциометра 17 остается неподвижным, так как он через шатун 33 и каркас второго пальца замкнут на привод 7 и самотормозящую передачу исполнительного механизма 11. Сигнал с первого потенциометра 17, пропорциональный углу поворота приемной гильзы 1, поступает на преобразователи сигнала 20-22, далее последовательно, соответственно, на усилители мощности 26-28 и приводы 7-9, соединенные с исполнительными механизмами 11-13. Исполнительные механизмы работают в следующем порядке. Выходной вал привода 36 поворачивает соединенный с ним червяк 35 передачи, который обкатывается по периферии сцепленного с ним зубчатого червячного колеса 37 вместе с приводом и каркасом соответствующего пальца. При подаче сигнала с первого потенциометра 17 начинается поворот каркасов 4-6 второго-четвертого пальцев. При повороте каркаса 4 второго пальца шатун 33, соединенный с ним и с рычагом 32, поворачивает статор потенциометра 17, стремясь привести сигнал управления к исходному нулевому значению. Другими словами, статор поворачиваясь, догоняет ротор, обеспечивая работу канала механической обратной связи. Когда инвалид-оператор прекращает поворачивать культю и, соответственно, приемную гильзу, привод поворачивает статор первого потенциометра 17 до тех пор пока сигнал управления не станет равным нулю, после чего он остановится. Таким образом, обеспечивается позиционная механическая обратная связь, причем пружины 31 позволяют инвалиду-оператору ощущать и усилие воздействия на объект манипулирования.
Одновременно с поворотом каркаса 4 второго пальца осуществляется управление движением каркаса 3 первого пальца. Каркас 4 второго пальца поворачивает ротор второго потенциометра 18, статор которого закреплен на корпусе 2, причем третий потенциометр 19, ротор которого закреплен на каркасе 3 первого пальца, а статор - на корпусе 2, являясь датчиком обратной связи, регистрирует угловое положение первого пальца. Сигналы с обоих потенциометров 18, 19 поступают на сумматор 23, где вычисляется сигнал рассогласования (разность сигналов), который служит сигналом управления приводом первого пальца, и в зависимости от полярности сигнала поступает либо на первый функциональный преобразователь 24, либо на второй 25. Далее сигнал рассогласования поступает последовательно на четвертый усилитель мощности 29, четвертый привод 10, воздействующий на исполнительный механизм 14 первого пальца. Когда сигнал рассогласования становится равным нулю привод первого пальца останавливается. Это происходит при остановке второго пальца и приемной гильзы, соответственно. Таким образом, обеспечивается позиционный контроль за положением первого пальца со стороны инвалида-оператора, так как определенному положению каркасов 3 и 4 первого и второго пальцев соответствует определенное положение культи кисти относительно предплечья.
Самоустановку третьего и четвертого пальцев по объекту сложной формы осуществляют при ограничении тока нагрузки в приводах 8 и 9 в процессе касания объекта пальцами. Иными словами, при встрече какого-либо из этих пальцев с препятствием ток нагрузки в приводе возрастает, срабатывает ограничение по току и происходит остановка работы привода этого пальца.
Каркас пятого пальца не имеет привода, изготовлен из упругого материала и принимает на себя повышенные нагрузки. Например, при письме, когда инвалид упирается протезом в поверхность стола, внешняя нагрузка приходится именно на пятый палец.
Положительный эффект заявляемого изобретения заключается в следующем: обеспечивается удобство инвалида при самообслуживании благодаря созданию достаточных усилий при самообслуживании, а также благодаря естественному сгибанию кисти, сокращению объема компенсаторных движений и сокращению, тем самым, времени выполнения двигательных операций при пользовании протезом. Реализация позиционной обратной связи в обоих направлениях движения пальцев, по существу, с отражением усилия на органе управления, и независимая установка третьего-четвертого пальцев позволяют инвалиду надежно удерживать в пальцах протеза кисти предметы сложной формы, в том числе, элементы одежды при пользовании ими.
Протез кисти, содержащий приемную гильзу, корпус, каркасы первого пальца, второго-четвертого пальцев, приводную систему функции подвижности «схват-раскрытие кисти», шарнир сгибания в лучезапястном сочленении и манжету на предплечье, отличающийся тем, что в него введены три потенциометра, три преобразователя сигнала, сумматор, два функциональных преобразователя и четыре усилителя мощности, при этом приводная система выполнена в виде четырех индивидуальных микроэлектроприводов пальцев, неподвижно закрепленных на каркасах первого-четвертого пальцев и соединенных с их исполнительными механизмами, при этом приемная гильза шарнирно закреплена в корпусе с возможностью приведения-отведения, неподвижно соединена с ротором первого потенциометра и шарнирно упруго соединена с подпружиненным рычагом, который соединен со статором первого потенциометра, при этом подпружиненный рычаг посредством шатуна, снабженного сферическими шарнирами, соединен с каркасом второго пальца, кроме того, первый потенциометр соединен с первым-третьим преобразователями сигнала, каждый из которых соответственно последовательно соединен с первым-третьим усилителями мощности, первым-третьим приводом и исполнительными механизмами второго-четвертого пальцев, причем каркас второго пальца неподвижно соединен с ротором второго потенциометра, статор которого закреплен на корпусе, причем каркас первого пальца неподвижно соединен с ротором третьего потенциометра, статор которого также закреплен на корпусе устройства, при этом второй и третий потенциометры соединены с сумматором, который соединен с первым и вторым функциональными преобразователями, последовательно соединенными с четвертым усилителем мощности, четвертым приводом и исполнительным механизмом первого пальца, а пятый палец выполнен в виде упругого звена, при этом каждый исполнительный механизм первого-четвертого пальцев выполнен в виде червячной передачи, червяк которой неподвижно соединен с выходным валом привода, причем червячное колесо неподвижно закреплено на корпусе, а каркас пальца шарнирно соединен с осью червячного колеса.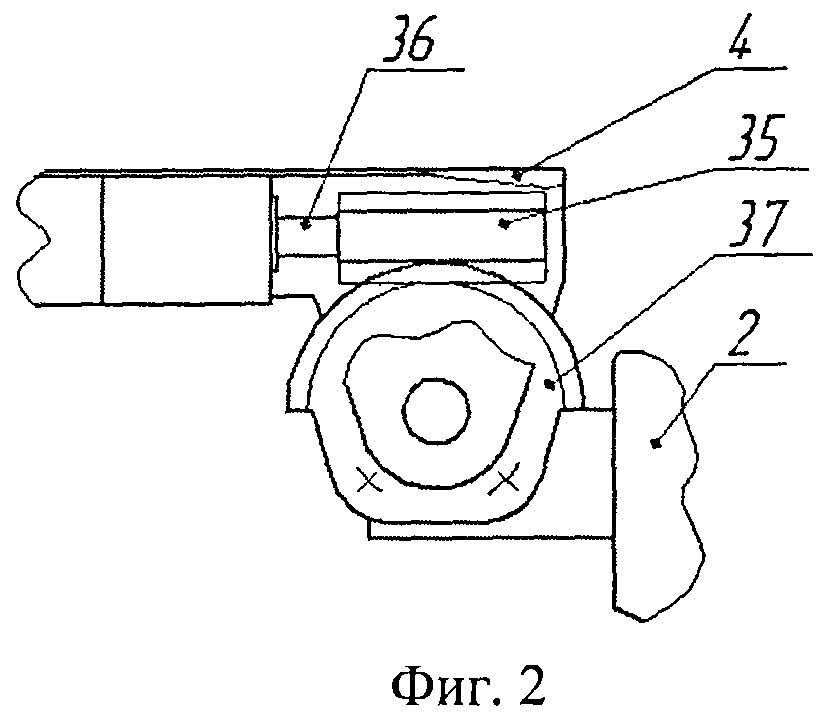
Искусственная кисть
Протез голени
Протез предплечья
Протез предплечья

