Результат интеллектуальной деятельности: СПОСОБ ПОИСКА НЕИСПРАВНЫХ БЛОКОВ В ДИСКРЕТНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЕ
Вид РИД
Изобретение
Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ поиска неисправных блоков в динамической системе. (Патент на изобретение №2453898 от 20.06.2012 по заявке №2010148468, МКИ 6 G05B 23/02, 2011).
Недостатком этого способа является то, что он обеспечивает определение кратных дефектов только в непрерывной динамической системе и обладает более высокими вычислительными затратами, связанными с вычислением экспоненциальной функции.
Наиболее близким техническим решением (прототипом) является способ поиска неисправного блока в дискретной динамической системе (Патент на изобретение №2444774 от 10.03.2012 по заявке №2011101271/08(001575), МКИ 6 G05B 23/02, 2011).
Недостатком этого способа является то, что он обеспечивает определение только одиночных дефектов в дискретной динамической системе и предполагает интегрирование специальных тестовых сигналов с использованием экспоненциальной весовой функции.
Технической задачей, на решение которой направлено данное изобретение, является расширение функциональных возможностей способа для нахождения одного или сразу нескольких неисправных блоков (кратных дефектов) в дискретной динамической системе с произвольным соединением блоков, а также расширение функциональных возможностей способа путем применения рабочего диагностирования (без использования тестового воздействия) и уменьшение аппаратных затрат на вычисление весовой функции.
Поставленная задача достигается тем, что предварительно регистрируют реакцию заведомо исправной дискретной во времени системы  , j=1,…,k для N дискретных тактов диагностирования
, j=1,…,k для N дискретных тактов диагностирования  с дискретным постоянным шагом Ts на интервале наблюдения [0, Tk] (где Tk=Ts·N) в k контрольных точках и определяют интегральные оценки выходных сигналов
с дискретным постоянным шагом Ts на интервале наблюдения [0, Tk] (где Tk=Ts·N) в k контрольных точках и определяют интегральные оценки выходных сигналов  , j=1,…,k дискретной системы, для чего в момент подачи тестового или рабочего сигнала на вход дискретной системы с номинальными характеристиками одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд в каждой из k контрольных точек с весовой функцией, равной среднему арифметическому значению модулей производных ее сигналов в контрольных точках, где усреднение производится по числу контрольных точек. Для этого на первые входы К блоков перемножения подают сигналы системы, на вторые входы блоков перемножения подают среднее арифметическое значение модулей производных по времени сигналов, выходные сигналы k блоков перемножения подают на входы k блоков дискретного интегрирования с шагом Ts секунд, дискретное интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов
, j=1,…,k дискретной системы, для чего в момент подачи тестового или рабочего сигнала на вход дискретной системы с номинальными характеристиками одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд в каждой из k контрольных точек с весовой функцией, равной среднему арифметическому значению модулей производных ее сигналов в контрольных точках, где усреднение производится по числу контрольных точек. Для этого на первые входы К блоков перемножения подают сигналы системы, на вторые входы блоков перемножения подают среднее арифметическое значение модулей производных по времени сигналов, выходные сигналы k блоков перемножения подают на входы k блоков дискретного интегрирования с шагом Ts секунд, дискретное интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов  , j=1,…,k регистрируют, фиксируют число m рассматриваемых одиночных и кратных дефектов блоков, определяют интегральные оценки сигналов модели для каждой из k контрольных точек, полученных в результате пробных отклонений для m одиночных и кратных дефектов блоков, для чего поочередно в каждый блок или комбинацию блоков дискретной динамической системы вводят пробное отклонение параметра дискретной передаточной функции и находят интегральные оценки выходных сигналов систем с пробными отклонениями при том же тестовом или рабочем сигнале x(t), полученные в результате дискретного интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждого из m пробных отклонений
, j=1,…,k регистрируют, фиксируют число m рассматриваемых одиночных и кратных дефектов блоков, определяют интегральные оценки сигналов модели для каждой из k контрольных точек, полученных в результате пробных отклонений для m одиночных и кратных дефектов блоков, для чего поочередно в каждый блок или комбинацию блоков дискретной динамической системы вводят пробное отклонение параметра дискретной передаточной функции и находят интегральные оценки выходных сигналов систем с пробными отклонениями при том же тестовом или рабочем сигнале x(t), полученные в результате дискретного интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждого из m пробных отклонений  , j=1,…,k; i=1,…,m регистрируют, определяют отклонения интегральных оценок сигналов дискретной модели, полученных в результате пробных отклонений параметров разных структурных блоков либо комбинаций блоков
, j=1,…,k; i=1,…,m регистрируют, определяют отклонения интегральных оценок сигналов дискретной модели, полученных в результате пробных отклонений параметров разных структурных блоков либо комбинаций блоков  , j=1,…,k; i=1,…,m, определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученных в результате пробных отклонений для одиночных и кратных дефектов из соотношения
, j=1,…,k; i=1,…,m, определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученных в результате пробных отклонений для одиночных и кратных дефектов из соотношения

в момент начала контроля t=1 на вход контролируемой системы подают аналогичный тестовый или рабочий сигнал x(t), определяют интегральные оценки сигналов контролируемой дискретной системы для k контрольных точек Fj(d), j=1,…,k, полученные значения регистрируют, определяют отклонения интегральных оценок сигналов контролируемой дискретной системы для k контрольных точек от номинальных значений  , j=1,…,k, определяют нормированные значения отклонений интегральных оценок сигналов контролируемой дискретной системы из соотношения
, j=1,…,k, определяют нормированные значения отклонений интегральных оценок сигналов контролируемой дискретной системы из соотношения

определяют диагностические признаки из соотношения
 ,
, 
по минимуму значения диагностического признака определяют порядковый номер дефектного блока или комбинации дефектных блоков.
Сущность предлагаемого способа заключается в следующем. Способ основан на использовании пробных отклонений параметров модели дискретной динамической системы. Для получения диагностических признаков динамических элементов используются интегральные оценки на временном интервале Tk в k контрольных точках
 ,
, 
Весовая функция в формуле (4) в виде среднего значения модулей производных сигналов в контрольных точках несет информацию о важности момента времени с точки зрения скорости изменения сигналов во всех контрольных точках. Чем больше средняя скорость изменения сигналов, тем с большим весом интегрируется выходной сигнал.
Используя векторную интерпретацию выражения (3), запишем его в следующем виде:
 ,
, 
где φi(d) - угол между нормированным вектором (вектором единичной длины) отклонений интегральных оценок сигналов дискретного объекта  и нормированным вектором (единичной длины) отклонений интегральных оценок сигналов дискретной модели
и нормированным вектором (единичной длины) отклонений интегральных оценок сигналов дискретной модели  , полученных в результате пробного отклонения i-го параметра структурного блока или комбинации параметров структурных блоков.
, полученных в результате пробного отклонения i-го параметра структурного блока или комбинации параметров структурных блоков.
Таким образом, нормированный диагностический признак (3) представляет собой значение квадрата синуса угла, образованного в k -мерном пространстве (где k - число контрольных точек) нормированными векторами интегральных оценок пробных отклонений сигналов дискретной модели и отклонений интегральных оценок сигналов дискретного объекта диагностирования.
Пробное отклонение параметра структурного блока или комбинации параметров структурных блоков, минимизирующее значение диагностического признака (3), указывает на наличие одиночного или кратного дефекта. Область возможных значений диагностического признака лежит в интервале [0, 1].
Таким образом, предлагаемый способ поиска неисправных блоков сводится к выполнению следующих операций:
1. В качестве дискретной динамической системы рассматривают систему, например с дискретной интерполяцией нулевого порядка, с шагом дискретизации Ts, состоящую из произвольно соединенных динамических блоков, с количеством рассматриваемых одиночных или кратных дефектов блоков m.
2. Предварительно определяют время контроля ТК≥ТПП, где ТПП - время переходного процесса дискретной системы. Время переходного процесса оценивают для номинальных значений параметров динамической системы.
3. Фиксируют число контрольных точек k.
4. Одновременно подают тестовый сигнал x(t) (единичный ступенчатый, линейно возрастающий, прямоугольный импульсный и т.д.) на вход системы управления с номинальными характеристиками, на вход контролируемой системы, на входы m моделей с номинальными параметрами, в каждую из которых введены пробные отклонения параметров одного или нескольких блоков так, что в i-ю систему введены пробные отклонения в i-ю комбинацию блоков. Принципиальных ограничений на вид входного тестового воздействия предлагаемый способ не предусматривает.
5. Одновременно регистрируют реакцию системы  , j=1,…,k на интервале
, j=1,…,k на интервале  с дискретным шагом Ts секунд на интервале наблюдения [0, Tk] (где Tk=Ts·N) в k контрольных точках и определяют дискретные интегральные оценки выходных сигналов
с дискретным шагом Ts секунд на интервале наблюдения [0, Tk] (где Tk=Ts·N) в k контрольных точках и определяют дискретные интегральные оценки выходных сигналов  , j=1,…,k системы с номинальными характеристиками, контролируемой системы Fj(d), j=1,…,k, моделей с пробными отклонениями в i-й комбинации блоков Pji(d), j=1,…,k; i=1,…,m (формула 4). Для этого в момент подачи входного сигнала одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд в каждой из k контрольных точек системы с номинальными характеристиками, контролируемой системы, моделей с пробными отклонениями параметров блоков с весовой функцией, равной среднему арифметическому значению модулей производных сигналов в контрольных точках, где усреднение производится по числу контрольных точек, для чего выходные сигналы каждой системы подают на первые входы k блоков перемножения, на вторые входы блоков перемножения подают среднее арифметическое значение модулей производных сигналов системы в контрольных точках, где усреднение производится по числу контрольных точек выходных сигналов системы, выходные сигналы k блоков перемножения подают на входы k блоков дискретного интегрирования с шагом Ts секунд, дискретное интегрирование завершают в момент времени Тк, полученные в результате дискретного интегрирования с шагом Ts секунд оценки выходных сигналов
, j=1,…,k системы с номинальными характеристиками, контролируемой системы Fj(d), j=1,…,k, моделей с пробными отклонениями в i-й комбинации блоков Pji(d), j=1,…,k; i=1,…,m (формула 4). Для этого в момент подачи входного сигнала одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд в каждой из k контрольных точек системы с номинальными характеристиками, контролируемой системы, моделей с пробными отклонениями параметров блоков с весовой функцией, равной среднему арифметическому значению модулей производных сигналов в контрольных точках, где усреднение производится по числу контрольных точек, для чего выходные сигналы каждой системы подают на первые входы k блоков перемножения, на вторые входы блоков перемножения подают среднее арифметическое значение модулей производных сигналов системы в контрольных точках, где усреднение производится по числу контрольных точек выходных сигналов системы, выходные сигналы k блоков перемножения подают на входы k блоков дискретного интегрирования с шагом Ts секунд, дискретное интегрирование завершают в момент времени Тк, полученные в результате дискретного интегрирования с шагом Ts секунд оценки выходных сигналов  , j=1,…,k, Fj(d), j=1,…,k, Pji(d), j=1,…,k; i=1,…,m регистрируют.
, j=1,…,k, Fj(d), j=1,…,k, Pji(d), j=1,…,k; i=1,…,m регистрируют.
6. Определяют отклонения интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров одного или сразу нескольких структурных блоков  , j=1,…,k; i=1,…,m.
, j=1,…,k; i=1,…,m.
7. Определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров одного или сразу нескольких блоков по формуле
 .
.
8. Определяют отклонения интегральных оценок сигналов контролируемой дискретной системы для k контрольных точек от номинальных значений  , j=1,…,k.
, j=1,…,k.
9. Вычисляют нормированные значения отклонений интегральных оценок сигналов контролируемой дискретной системы по формуле
 .
.
10. Вычисляют диагностические признаки наличия неисправного структурного блока или комбинации нескольких блоков по формуле (3).
11. По минимуму значения диагностического признака определяют дефектный блок или комбинацию несколько блоков.
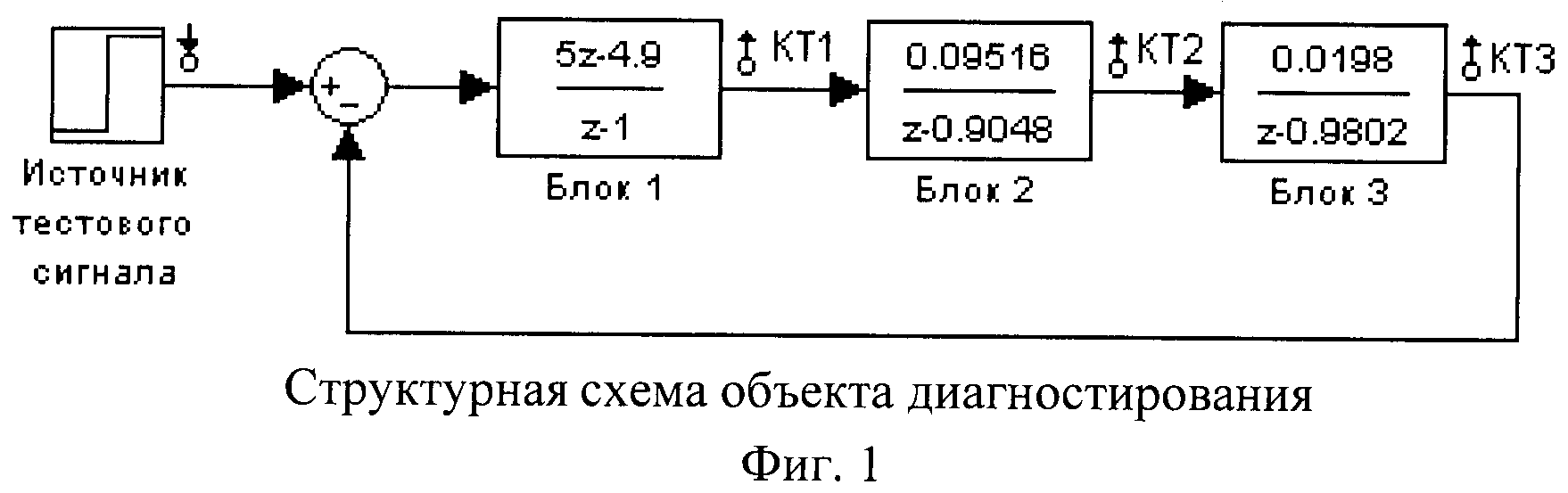
Рассмотрим реализацию предлагаемого способа поиска дефекта для дискретной системы, структурная схема которой представлена на фиг.1.
Дискретные передаточные функции блоков:
 ;
;  ;
;  ,
,
номинальные значения параметров: K1=5; Z1=0.98; К2=0.09516; Q2=0.9048; К3=0.0198; Q3=0.9802.
При моделировании в качестве входного сигнала будем использовать псевдослучайный сигнал (при моделировании использовался блок Band-Limited White Noise в среде Matlab). Время контроля Тк выберем равным 10 с.
Определим варианты (m=7) пробных отклонений в виде уменьшения коэффициентов усиления (k1,…,k3) каждого динамического блока и комбинаций блоков на 10%: k1=4 (i=1); k2=0.085644 (i=2); k3=0.01782 (i=3); k1=4 и k2=0.085644 (i=4); k2=0.085644 и k3=0.01782 (i=5); k1=4 и k3=0.01782 (i=6); k1=4, k2=0.085644 и k3=0.01782 (i=7). При поиске кратного структурного дефекта в виде отклонения коэффициентов усиления на 20% (k1=4, k2=0.085644, k3=0.01782) в первом, втором и третьем звеньях, при подаче рабочего (псевдослучайного) входного сигнала и Тк=10 с, при использовании трех контрольных точек, расположенных на выходах блоков, используя пробные отклонения величиной 10%, получены значения диагностических признаков по формуле (3): J1=0.0609; J2=0.3762; J3=0.07686; J4=0.9795; J5=0.6962; J6=0.02014; J7=0.001525. Анализ значений диагностических признаков показывает, что кратный дефект одновременно в первом, втором и третьем структурных блоках контролируемой дискретной системы находится правильно. Следует отметить, что способ работоспособен и при больших значениях величин пробных отклонений параметров (10-40%). Ограничением на величину пробного отклонения является необходимость сохранения устойчивости моделей с пробными отклонениями.
Поиск кратных структурных дефектов согласно предлагаемому способу применительно к дискретному объекту диагностирования, представленному на фиг.1, сводится к выполнению следующих операций:
1. Фиксируют число контролируемых одиночных и кратных дефектов m=7.
2. Путем анализа графиков номинальных переходных характеристик определяют время переходного процесса дискретной системы. Для данного примера время переходного процесса составляет ТПП=8 с. Фиксируют время контроля Tk≥ТПП. Для данного примера Tk=10 с.
3. Фиксируют контрольные точки на выходах блоков: k=3.
4. Одновременно подают единичный тестовый сигнал на вход системы управления с номинальными характеристиками, на вход контролируемой системы, в которую введены отклонения параметров первого, второго и третьего блоков от номинального на 20% (кратный дефект в трех блоках) и на входы m моделей с номинальными параметрами, в каждую из которых введены пробные отклонения параметров одного или нескольких блоков так, что в i-ю систему введены пробные отклонения в i-ю комбинацию блоков. Величину пробных отклонений выбирают равной 10%.
5. Определяют отклонения интегральных оценок сигналов контролируемой системы для трех контрольных точек от номинальных значений  , j=1,…,3.
, j=1,…,3.
6. Вычисляют нормированные значения отклонений интегральных оценок сигналов контролируемой системы  по формуле (2).
по формуле (2).
7. Предварительно находят элементы векторов  отклонений интегральных оценок сигналов модели, полученных в результате пробных отклонений параметров всех контролируемых одиночных и кратных дефектов. Величину пробных отклонений выбирают равной 10%.
отклонений интегральных оценок сигналов модели, полученных в результате пробных отклонений параметров всех контролируемых одиночных и кратных дефектов. Величину пробных отклонений выбирают равной 10%.
8. Находят нормированные векторы  отклонений интегральных оценок сигналов модели, полученных в результате пробных отклонений соответствующих параметров всех контролируемых одиночных и кратных дефектов по формуле (1).
отклонений интегральных оценок сигналов модели, полученных в результате пробных отклонений соответствующих параметров всех контролируемых одиночных и кратных дефектов по формуле (1).
9. Вычисляют диагностические признаки наличия неисправных блоков по формуле (3): J1=0.0609; J2=0.3762; J3=0.07686; J4=0.9795; J5=0.6962; J6=0.02014; J7=0.001525, где J1 указывает на дефект в первом блоке, J2 соответственно указывает на дефект во втором, J3 указывает на дефект в третьем, J4 указывает на дефекты в первом и втором блоках, J5 - на дефекты в первом и третьем блоках, J6 - на дефекты во втором и третьем блоках, a J7 - соответственно на дефекты в первом, втором и третьем блоках.
10. По минимуму значения диагностического признака определяют комбинацию дефектных блоков (в данном случае - i=7).
Моделирование процессов поиска кратного дефекта при других случаях его проявления для данного объекта диагностирования дает следующие значения диагностических признаков.
При наличии дефектов в блоках №1 и №3 (в виде уменьшения параметров k1 и k3 на 20%, кратный дефект №5): J1=0.8392; J2=0.9997; J3=0.3689; J4=0.2646; J5=0.004584; J6=0.7689; J7=0.6741.
При наличии дефектов в блоках №2 и №3 (в виде уменьшения параметров k2 и k3 на 20%, дефект №6): J1=0.01478; J2=0.2546; J3=0.159; J4=0.9996; J5=0.8107; J6=0; J7=0.01169.
При наличии дефектов в блоках №1 и №2 (в виде уменьшения параметров k1 и k2 на 20%, дефект №4): J1=0.9271; J2=0.5643; J3=0.9576; J4=0.04752; J5=0.4092; J6=0.9582; J7=0.9878.
Покажем, что данный способ работоспособен и для поиска одиночных структурных дефектов.
При наличии дефекта в блоке №3 (в виде уменьшения параметра k3 на 20%, дефект №3): J1=0.2457; J2=0.6634; J3=0.0001691; J4=0.821; J5=0.4162; J6=0.1743; J7=0.1056.
При наличии дефекта в блоке №2 (в виде уменьшения параметра k2 на 20%, дефект №2); J1=0.173; J2=0.0003466; J3=0.6335; J4=0.7847; J5=0.9967; J6=0.2321; J7=0.3261.
При наличии дефекта в блоке №1 (в виде уменьшения параметра k1 на 20%, дефект №1): J1=0.0001062; J2=0.184; J3=0.2361; J4=0.9967; J5=0.8825; J6=0.01257; J7=0.04964.
Минимальное значение диагностического признака во всех случаях правильно указывает на дефектные блоки.
1. Способ поиска неисправных блоков в дискретной динамической системе, основанный на том, что определяют время контроля Т≥Т, используют входной сигнал x(t) на интервале t∈[0, Т], фиксируют число k контрольных точек системы, регистрируют реакцию объекта диагностирования и модели, регистрируют реакцию заведомо исправной системы , j=1,…,k для N дискретных тактов диагностирования с дискретным постоянным шагом Ts на интервале наблюдения [0, T] (где T=T·N) в k контрольных точках, фиксируют число различных пробных отклонений m, определяют интегральные оценки сигналов модели для каждой из k контрольных точек, полученные в результате пробных отклонений параметров блоков, для чего вводят пробные отклонения параметров передаточных функций и находят интегральные оценки выходных сигналов системы, полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и m пробных отклонений регистрируют, определяют отклонения интегральных оценок сигналов модели, определяют интегральные оценки выходных сигналов дискретной системы, для чего в момент подачи тестового сигнала на вход дискретной системы с номинальными характеристиками одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд в каждой из k контрольных точек, определяют интегральные оценки сигналов модели для каждой из k контрольных точек, полученных в результате m пробных отклонений, для чего в блоки дискретной динамической системы вводят пробные отклонения параметров дискретной передаточной функции и находят интегральные оценки выходных сигналов системы для входного сигнала x(t), полученные в результате дискретного интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждого из m пробных отклонений регистрируют, определяют отклонения интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров, определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров, определяют отклонения интегральных оценок сигналов контролируемой дискретной системы для k контрольных точек от номинальных значений, вычисляют нормированные значения отклонений интегральных оценок сигналов контролируемой дискретной системы, вычисляют диагностические признаки, по минимуму диагностического признака определяют дефект дискретной системы, отличающийся тем, что одновременно подают тестовый или рабочий сигнал x(t) на вход системы с номинальными характеристиками, на вход контролируемой системы, на входы m моделей с номинальными характеристиками, в каждую из которых введены пробные отклонения параметров одного блока или комбинации блоков так, что в i-ю систему вводят пробные отклонения в i-ю комбинацию блоков, в качестве динамических характеристик системы используют интегральные оценки, полученные для весовой функции, равной среднему арифметическому модулей производных по времени от выходных сигналов системы в различных контрольных точках, из соотношения , , определяют интегральные оценки выходных сигналов , j=1,…,k системы с номинальными характеристиками, для чего в момент подачи тестового или рабочего сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование сигналов системы в каждой из k контрольных точек для весовой функции, путем подачи на первые входы k блоков перемножения сигналов системы на вторые входы блоков перемножения подают среднее арифметическое модулей производных по времени от выходных сигналов системы с номинальными характеристиками, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Т, полученные в результате интегрирования оценки выходных сигналов , j=1,…,k регистрируют, аналогично определяют интегральные оценки сигналов m моделей для каждой из k контрольных точек, полученные в результате пробных отклонений параметров каждой из m комбинаций блоков, полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек, каждого из m пробных отклонений P(d), j=1,…,k; i=1,…,m регистрируют, определяют отклонения интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров одного или нескольких структурных блоков , j=1,…,k; i=1,…,m., определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров одного или нескольких блоков по формуле , определяют отклонения интегральных оценок сигналов контролируемой дискретной системы для k контрольных точек от номинальных значений , j=1,…,k, вычисляют нормированные значения отклонений интегральных оценок сигналов контролируемой дискретной системы по формуле . аналогично определяют интегральные оценки сигналов m моделей для каждой из k контрольных точек, полученные в результате пробных отклонений параметров каждой из m комбинаций блоков, полученные нормированные значения интегральных оценок сигналов используют для вычисления диагностических признаков , i=1,…,m, по минимуму диагностического признака определяют комбинацию дефектных блоков.










Способ поиска неисправного блока в дискретной динамической системе на основе смены позиции входного сигнала
Способ поиска неисправностей динамического блока в непрерывной системе на основе функции чувствительности
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Способ поиска топологического дефекта в непрерывной динамической системе на основе функции чувствительности
Способ поиска неисправного блока в непрерывной динамической системе на основе введения пробных отклонений
Способ поиска топологического дефекта в дискретной динамической системе на основе введения пробных отклонений
Способ поиска топологического дефекта в непрерывной динамической системе на основе введения пробных отклонений
Способ поиска топологического дефекта в непрерывной динамической системе на основе введения пробных отклонений
Дробилка для зерна
Этинолеперлитобетон
Способ поиска неисправных блоков в непрерывной динамической системе
Траверса для лесоматериалов
Модификатор
Лигатура
Смеситель
Засыпная забойка взрывных скважин с элементами каменного материала
Способ обработки заготовок из капролона
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Комбинированная робастная система управления для априорно неопределенных динамических объектов периодического действия с наблюдателем

