Результат интеллектуальной деятельности: РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА
Вид РИД
Изобретение
Изобретение относится к военной и специальной технике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в условиях боевых действий, а также в труднодоступных и опасных для присутствия человека местах.
Известен мобильный робототехнический комплекс (см. патент RU №2364500 C2, МПК B25J 5/00, опубл.20.08.09 г., бюл. №23), принятый за прототип. Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает в свой состав мобильный робот, пост дистанционного управления, систему двусторонней связи между постом и роботом, обеспечивающую канал связи и комплект дополнительного оборудования. В базовый комплект дополнительного оборудования входят различные устройства и механизмы, которыми оснащается робот, применительно к конкретной оперативной задаче. В этот комплект входят транспортная прицепная тележка, автомобильный эвакуатор, комплект губок схвата различной конфигурации, кронштейны-держатели разрушителей взрывоопасных предметов. Собственно мобильный робот представляет собой самоходное телеуправляемое транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной двусторонней связи с постом управления (2) и бортовая телевизионная система. Бортовая телевизионная система включает в себя отдельные видеоблоки, расположенные на звеньях манипулятора и на корпусе транспортного средства, в состав каждого видеоблока, в свою очередь, входит видеокамера, заключенная в защитный кожух с источниками подсветки. Один из видеоблоков, выполняющий обзорные функции, располагается на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях. На транспортном средстве также укреплены приводы многостепенного манипулятора и сам манипулятор с захватным устройством, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации. Отличительной особенностью комплекса является то, что он дополнительно укомплектован выносной системой видеонаблюдения с собственной системой связи и управления, обеспечивающей канал связи и управления выносной системы видеонаблюдения и интегрированного поста дистанционного управления. Мобильный робот комплекса снабжен также устройством доставки системы видеонаблюдения в заданную точку местности и ее оперативного развертывания. В качестве указанного устройства может быть использовано штатное захватное устройство, установленное на манипулятор робота или иное устройство. Выносная система видеонаблюдения представляет собой видеоблок, укрепленный на двухстепенном приводе наведения, который, в свою очередь, располагается на штативе. На этом же штативе смонтирована система связи с базовым удаленным постом управления выносной системы, в качестве которого может быть использован или пост, интегрированный в общий пост дистанционного управления мобильным робототехническим комплексом, или, как вариант, отдельный пост управления выносной системой видеонаблюдения. Кроме того, в комплект дополнительного оборудования мобильного робототехнического комплекса входит раздвижная телескопическая штанга-удлинитель, снабженная на одном конце узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота и на другом конце снабженная узлом крепления привода индивидуального наведения в горизонтальной и вертикальной плоскостях. Узлы крепления и выполнены унифицированными с узлами крепления других монтируемых на мобильный робот устройств (в частности, видеоблоков) по типу «ласточкин хвост» с фиксацией винтами-барашками, что обеспечивает удобство монтажа. Телескопическая штанга-удлинитель выполнена с возможностью изменения и фиксации ее длины.
Недостатками прототипа являются:
- отсутствие возможности адаптированного «поведения» при выполнении боевой задачи в изменяющихся условиях окружающей среды;
- недостаточно высокий срок непрерывного применения;
- низкая степень точности позиционирования на местности.
Предлагаемым изобретением решается задача по повышению боевой эффективности боевых мобильных роботизированных платформ и расширение их функциональных возможностей.
Технический результат, получаемый при осуществлении изобретения, заключается в создании роботизированной транспортной платформы, предназначенной для нужд Сухопутных войск ВС РФ и обеспечивающей выполнение следующих основных задач: сбор и передачу разведывательной информации, охрану или патрулирование гражданских и военных объектов, проведение антитеррористических операций в городских и полевых условиях, ведение стрельбы по различным видам целей в дневных и ночных условиях за счет применения расширенного комплекса аппаратных и боевых средств.
Указанный технический результат достигается тем, что в предлагаемой роботизированной транспортной платформе (РТП), содержащей самоходное управляемое транспортное средство с приводом и бортовыми источниками электропитания, пульт дистанционного управления, систему управления движением, систему связи и передачи данных, комплект функционального оборудования, систему технического зрения, приводы исполнительных механизмов, новым является то, что в качестве самоходного управляемого транспортного средства выбран колесный движитель повышенной проходимости с приводом от двигателя внутреннего сгорания, комплект функционального оборудования выполнен в виде боевого модуля для ведения стрельбы по различным видам целей в дневных и ночных условиях, содержащего поворотную платформу с системой наведения, блок управления и средство огневого поражения, линейные электродвигатели системы управления движением РТП электрически связаны с сервоусилителями и механически - с правым и левым рулевыми механизмами, коробкой переключения передач, рычаг газа механически связан с сервомашинкой, система управления движением дополнительно оснащена ультразвуковыми датчиками обнаружения объектов, РТП дополнительно оснащен системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, информационно-вычислительной системой, состоящей из двух бортовых компьютеров и магистрально -модульной платформы, для выполнения вспомогательных операций РТП дополнительно оснащен аппаратурой для обеспечения резервной связи по каналам системы связи и передачи данных, система связи и передачи данных оснащена коммутатором и двумя маршрутизаторами для работы по основному и резервному каналам радиосвязи, сервоусилители, сервомашинка, ультразвуковые датчики обнаружения объектов системы управления движением, инерциальная система ориентации в пространстве, спутниковая навигационная система и одометры системы топопривязки и навигации, бортовая аппаратура транспортного средства - тахометр и спидометр, видеокамеры системы технического зрения по каналам информационного обмена связаны с информационно-вычислительной системой, электропитание РТП осуществляется от автономного источника, установленного на транспортном средстве.
Выбор в качестве самоходного управляемого транспортного средства колеснного движителя повышенной проходимости с приводом от двигателя внутреннего сгорания позволяет:
- значительно повысить продолжительность непрерывной работы РТП;
- повысить тяговые и скоростные характеристики;
- обеспечить устойчивое движение в условиях пересеченной местности при допустимом поперечном и продольном крене до 25 град.;
- обеспечить преодоление уступов высотой до 20 см;
- обеспечить преодоление рвов шириной до 40 см;
- обеспечить движение по песку, по пересеченной местности с высотой снежного покрова до 30 см.
Выполнение комплекта функционального оборудования в виде боевого модуля для ведения стрельбы по различным видам целей в дневных и ночных условиях, содержащего поворотную платформу, блок управления и средство огневого поражения, позволяет:
- обеспечить ведение боевой работы в широком секторе наблюдения и обстрела -±200°;
- обеспечить ведение боевой работы при угле наблюдения и обстрела по вертикали от -20° до +60° в указанном выше секторе;
- обеспечить скорость плавного наведения средства огневого поражения на цель в горизонтальной и вертикальной плоскостях не менее 0,2 град/с.
Обеспечение выполнения электрической связи линейных электродвигателей системы управления движением РТП с сервоусилителями и механической - с правым и левым рулевыми механизмами, коробкой переключения передач позволяет:
- обеспечить стабилизацию скорости и положения валов линейных электродвигателей;
- обеспечить выполнение РТП поворотов (разворотов) и выбор направления его движения.
Выполнение механической связи рычага газа с сервомашинкой позволяет выбрать для РТП оптимальный скоростной режим.
Оснащение системы управления движением ультразвуковыми датчиками обнаружения объектов позволяет:
- обеспечить обнаружение в районе движения РТП наличия препятствий любой конфигуративной сложности;
- предотвратить столкновение РТП с обнаруженными препятствиями;
- обеспечить обнаружение объектов при наличии атмосферных осадков;
- обеспечить обнаружение объектов различной структуры (твердых, жидких, зернообразных и порошкообразных), прозрачности и цвета.
Оснащение РТП системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, позволяет:
- обеспечить требуемую точность определения навигационной информации за счет комплексирования данных, поступающих с построенных на различных физических принципах датчиков: инерциальной системы ориентации в пространстве, спутниковой навигационной системы и одометров;
- обеспечить начальную привязку РТП;
- обеспечить определение текущих координат, дирекционного угла продольной оси РТП;
- обеспечить привязку РТП к шкале единого времени;
- обеспечить сохранение географических координат пройденного пути и передачу их оператору;
- обеспечить отображение маршрута движения РТП на цифровой карте местности в реальном масштабе времени.
Оснащение РТП информационно - вычислительной системой, состоящей из двух бортовых компьютеров и магистрально-модульной платформы, позволяет:
- обеспечить решение информационных и расчетных задач;
- обеспечить обработку информации от пульта управления;
- обеспечить формирование для передачи на пульт дистанционного управления информационных команд, телеметрической информации и видеоизображения;
- обеспечить управление датчиками и приводами РТП.
Оснащение РТП для выполнения вспомогательных операций аппаратурой для обеспечения резервной связи по каналам системы связи и передачи данных позволяет осуществлять ручное управление РТП при установке на платформу для транспортирования или съезде с нее, при установке в помещение для хранения или стоянки, при выезде на точку с известными координатами для начального ориентирования.
Осуществление связи по каналам информационного обмена аппаратных средств системы управления движением, системы топопривязки и навигации, бортовой аппаратуры транспортного средства, системы связи и передачи данных, системы технического зрения с информационно-вычислительной системой позволяет:
- обеспечить прием и обработку всей информации поступающей с приборов и систем, входящих в состав РТП;
- обеспечить выдачу информации в формализованной форме на устройства передачи и хранения информации;
- сформировать команды управления для исполнительных механизмов.
Осуществление электропитания систем РТП от автономного источника, установленного на транспортном средстве, позволяет:
- повысить помехозащищенность аппаратных средств РТП;
- повысить энергетический потенциал, позволяющий разместить на РТП дополнительное оборудование.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежом, где показана структурная схема роботизированной транспортной платформы.
Роботизированная транспортная платформа состоит из следующих основных элементов: колесного движителя повышенной проходимости 1, системы электропитания (СЭ) 2, информационно-вычислительной системы (ИВС) 3, системы управления (СУД) 4, системы топопривязки и навигации (СТН) 5, системы связи и передачи данных (ССПД) 6, системы технического зрения (СТЗ) 7, пульта дистанционного управления (ПДУ) 8, аппаратуры для обеспечения резервной радиосвязи (АОРР) 9, боевого модуля (БМ) 10. Колесный движитель повышенной проходимости 1 оснащен приводом 11 от двигателя внутреннего сгорания, бортовой аппаратурой (БА) 12 в виде тахометра (Т) 13 и спидометра (С) 14, левым и правым рулевыми механизмами (ЛРМ и ПРМ) 15 и 16, рычагом газа (РГ) 17, коробкой переключения передач (КПП) 18. Система электропитания (СЭ) 2 РТП состоит из генератора (Г) 19 с приводом от двигателя внутреннего сгорания (ДВС) 20, аккумуляторных батарей (АКБ) 21, преобразователей (П) 22, 23 и 24. Информационно - вычислительная система (ИВС) 3 содержит два бортовых компьютера (БК) 25 и 26, магистрально - модульную платформу (ММП) 27. Система управления движением (СУД) 4 содержит сервомашинку (СМ) 28, сервоусилитель (СУ) 29, связанный с линейным двигателем (ЛД) 30, СУ 31, связанный с ЛД 32, СУ 33, связанный с ЛД 34, ультразвуковые датчики (УЗД) 35. Система топопривязки и навигации (СТН) 5 содержит инерциальную систему ориентации в пространстве (ИСОП) 36, спутниковую навигационную систему (СНС) 37, левый и правый одометры (ЛО и ПО) 38 и 39. Система связи и передачи данных (ССПД) 6 содержит коммутатор (К) 40, маршрутизаторы (М) 41 и 42. Система технического зрения (СТЗ) 7 содержит видеокамеры (ВК) 43 и 44. Боевой модуль (БМ) 10 содержит поворотную платформу с системой наведения (ППСН) 45, блок управления (БУ) 46 и средство огневого поражения (СОП) 47.
Роботизированная транспортная платформа работает следующим образом. Для решения поставленной оперативной задачи РТП доставляется к месту назначения любым видом транспорта. Причем управление перемещением движителя 1 при погрузочно-разгрузочных работах, выезде на точку с известными координатами при начальном ориентировании осуществляется в ручном режиме с помощью АОРР 9. В качестве АОРР 9 используется компьютерная аппаратура, предназначенная для управления движущими объектами.
РТП работает в режиме дистанционного или полуавтономного управления. Дистанционное управление движением, средствами разведки и ведением огня с ПДУ 8 осуществляется на дальности до 2 км. Использование РТП предусматривает ведение разведки местности и целей в дневных и ночных условиях, сбор и передачу разведывательной информации, ведение стрельбы по различным видам целей в дневных и ночных условиях, в широком диапазоне рабочих температур, охрану и патрулирование гражданских и военных объектов, огневое прикрытие, проведение антитеррористических операций в городских и полевых условиях, навигацию при перемещениях.
Электроснабжение аппаратных средств РТП, БМ 10 осуществляется от автономного источника электропитания, состоящего из Г 19 с приводом от ДВС 20, и резервного источника в виде АКБ 21. Выдача стабилизированных питающих напряжений осуществляется с П22…24.
Основным «интеллектуальным» элементом РТП является ИВС 3, которая координирует работу всех систем, формирует управляющие команды. В частности, исполнительные механизмы СУД 4, отвечающие за отработку поворотов, направления движения, скорости, страгивания с места и остановку получают управляющие команды от ИВС 3, которая в свою очередь, через ССПД 6 по каналам радиосвязи связана с ПДУ 8 или АОРР 9. Отработка управляющих сигналов, поступающих с ММП 27 ИВС 3, производится в СУ 29, 31 и 33, СМ 28. СУ 29, 31 и 33 отвечают за стабилизацию скорости и положения валов ЛД 30, 32 и 34. Осуществление поворота движителя 1 происходит за счет притормаживания, в зависимости от того, в какую сторону нужно повернуть, правого или левого приводных колес. ЛД 30 отвечает за торможение левых колес, ЛД 32 - правых, ЛД 34 - за выбор направления движения: «вперед» - «назад». Регулирование скорости производится при помощи СМ 28, устанавливающей положение РГ 17. При движении РТП в реальных условиях местности на его пути возникают препятствия различной степени сложности, размера и структуры. Для определения расстояния до них и дальнейшего определения способа преодоления данных препятствий на РТП установлены УЗД 35. Для ультразвуковых датчиков скорости характерны высокая надежность обнаружения сложных объектов, низкая восприимчивость к интерференции и возможность применения в трудных рабочих условиях.
Управление РТП в ручном режиме осуществляется посредством ПДУ 8 или через АОРР 9. В данном режиме обеспечивается управление движением РТП, формирование и передача на РТП команд управления, прием, обработку и отображение видеоинформации от СТЗ 7 в реальном масштабе времени (прямая трансляция), отображение на цифровой карте местности информации о местоположении и маршруте движения РТП, прокладка маршрута движения, контроль движения, корректировка или прекращение движения в критических ситуациях. При этом ВК 43 и 44 СТЗ 7 обеспечивают возможность видеонаблюдения спереди и сзади РТП с достаточным углом обзора, распознавание состояния дороги и препятствий.
Отличительной особенностью РТП является оснащение ее СТН 5, содержащей ИСОП 36, СНС 37, ЛО 38 и ПО 39. Высокая точность определения навигационной информации обеспечивается за счет комплексирования данных, поступающих с построенных на различных физических принципах датчиков. СТН 5 обеспечивает начальную привязку РТП, определение текущих координат, дирекционного угла продольной оси движителя 1, привязку РТП к шкале единого времени, сохранение географических координат пройденного пути и передачу их на ПДУ 8. Кроме того, ПО 38 и ПО 39 предназначены для определения значения разницы скоростей правых и левых колес с дальнейшим определением в ИВС 3 угла при отработке поворота РТП.
Передача команд управления, данных о положении и состоянии РТП происходит по каналам ССПД 6. М 41 предназначен для работы с ПДУ 8, а М 42 - с ПДУ 8 или АОРР 9.
ИВС 3 связана со всеми системами и подсистемами РТП и обеспечивает решение информационных и расчетных задач, обработку информации от ПДУ 8, телеметрической информации и видеоизображения, формирование информационных команд, управление аппаратными средствами РТП, дистанционное и полуавтономное управление движением РТП, запоминание маршрута движения, возвращение РТП в исходную точку по пройденному маршруту, сжатие информации и ее криптографическую защиту при передаче по каналу связи, решение топогеодезических задач, управление датчиками и приводами. БК 25 работает с ПДУ 8, БК 26 - с ПДУ 8 или АОРР 9. Распределение информационных потоков в основном происходит в ММП 27.
БМ 10, содержащий ППСН 45, БУ 46 и СОП 47, обеспечивает:
- в дневных условиях дальность обнаружения цели не менее 2000 м, дальность поражения - (800-1000) м;
- в ночных условиях дальность обнаружения цели не менее 1000 м, дальность поражения не менее 500 м.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании роботизированной транспортной платформы, обеспечивающей выполнение следующих основных задач: сбор и передачу разведывательной информации, охрану или патрулирование гражданских и военных объектов, проведение антитеррористических операций в городских и полевых условиях, ведение стрельбы по различным видам целей в дневных и ночных условиях за счет применения расширенного комплекса аппаратных и боевых средств.
Роботизированная транспортная платформа, содержащая самоходное управляемое транспортное средство с приводом и бортовыми источниками электропитания, пульт дистанционного управления, систему управления движением, систему связи и передачи данных, комплект функционального оборудования, систему технического зрения, приводы исполнительных механизмов, отличающаяся тем, что в качестве самоходного управляемого транспортного средства выбран колесный движитель повышенной проходимости с приводом от двигателя внутреннего сгорания, комплект функционального оборудования выполнен в виде боевого модуля для ведения стрельбы по различным видам целей в дневных и ночных условиях, содержащего поворотную платформу с системой наведения, блок управления и средство огневого поражения, линейные электродвигатели системы управления движением РТП электрически связаны с сервоусилителями и механически с правым и левым рулевыми механизмами, коробкой переключения передач, рычаг газа механически связан с сервомашинкой, система управления движением дополнительно оснащена ультразвуковыми датчиками обнаружения объектов, РТП дополнительно оснащен системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, информационно-вычислительной системой, состоящей из двух бортовых компьютеров и магистрально-модульной платформы, для выполнения вспомогательных операций PTП дополнительно оснащен аппаратурой для обеспечения резервной связи по каналам системы связи и передачи данных, система связи и передачи данных оснащена коммутатором и двумя маршрутизаторами для работы по основному и резервному каналам радиосвязи, сервоусилители, сервомашинка, ультразвуковые датчики обнаружения объектов системы управления движением, инерциальная система ориентации в пространстве, спутниковая навигационная система и одометры системы топопривязки и навигации, бортовая аппаратура транспортного средства - тахометр и спидометр, видеокамеры системы технического зрения по каналам информационного обмена связаны с информационно-вычислительной системой, электропитание систем РТП осуществляется от автономного источника, установленного на транспортном средстве.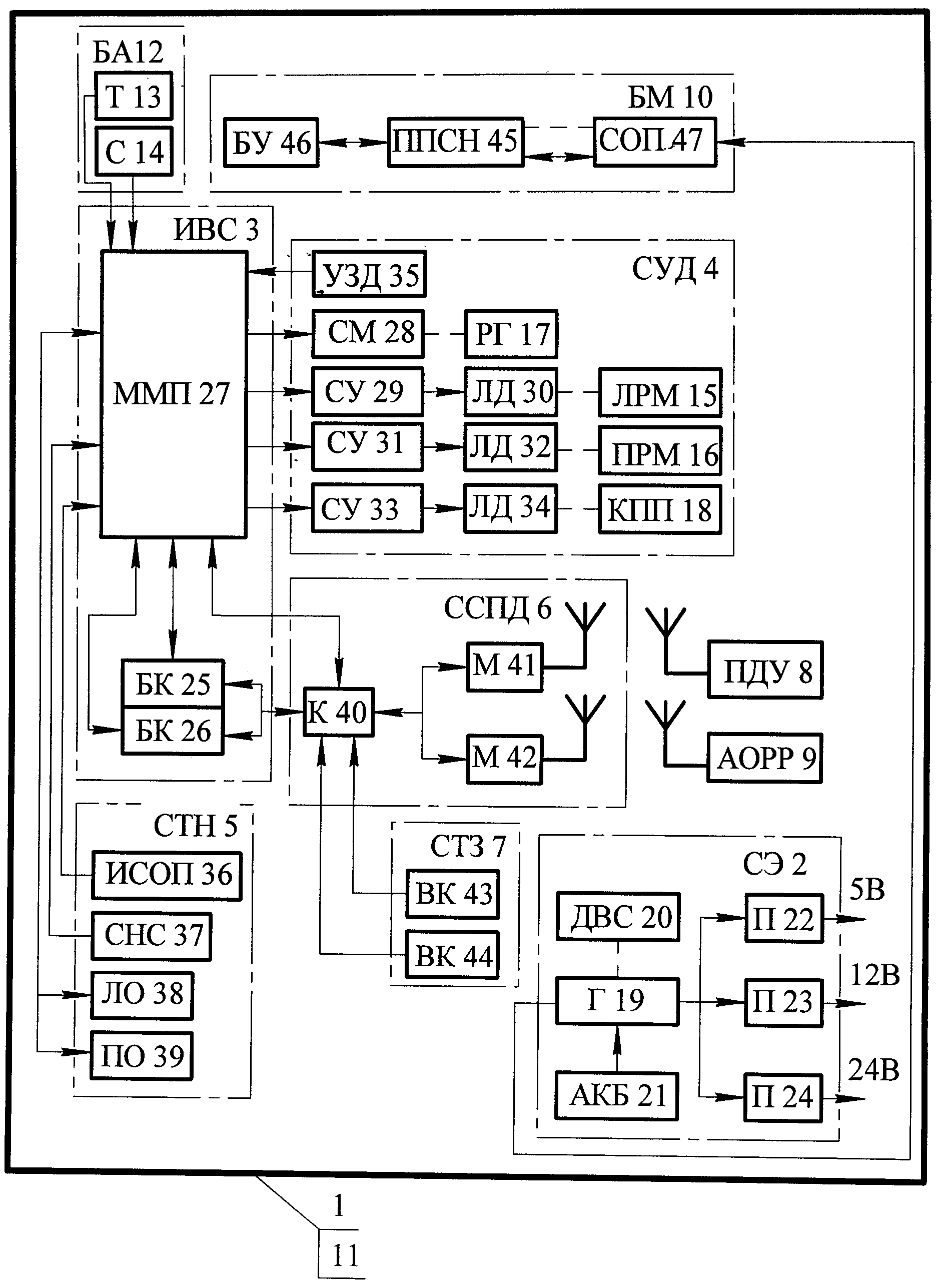
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ создания топогеодезических сетей для подготовки боевых действий ракетных войск, артиллерии и противовоздушной обороны сухопутных войск
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ создания топогеодезических сетей для подготовки боевых действий ракетных войск, артиллерии и противовоздушной обороны сухопутных войск

