Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к системе управления транспортного средства, которая выполнена с возможностью управления характеристиками поведения или характеристиками ускорения/замедления (которые называются "характеристиками движения") транспортного средства, такими как характеристика мощности, характеристика рулевого управления и характеристика подвески транспортного средства, так что характеристики движения совпадают с окружением движения и предпочтениями водителя, и характеристикой в отношении движения.
УРОВЕНЬ ТЕХНИКИ
Хотя поведение транспортного средства, например скорость и направление движения транспортного средства, варьируется согласно операции ускорения/замедления водителя и операции рулевого управления, взаимосвязь между величиной операции водителя и величиной изменения поведения определяется не только посредством эффективности использования энергии, например эффективности использования топлива, но также и посредством характеристик, таких как комфорт во время езды, бесшумность и динамические характеристики, которые требуются от транспортного средства.
Тем временем окружение, в котором движется транспортное средство, включает в себя различные окрестности или типы дорог, например городские трассы, скоростная автомагистраль, извилистая дорога, подъем и спуск, и существует множество предпочтений и намерений водителя в отношении движения, и существует множество впечатлений, которые водитель принимает из транспортного средства во время движения. Следовательно, ожидаемая характеристика движения необязательно получается, если окружение движения изменяется или транспортное средство управляется другим водителем. Как результат, может ухудшаться так называемая общая характеристика управляемости.
Таким образом, разработан один тип транспортного средства, который допускает возможность вручную выбирать характеристики движения, например характеристику выходной мощности (или характеристику ускорения) и характеристику подвески, касающуюся поведения транспортного средства, посредством управления переключателем выбора режима. В частности, транспортное средство допускает возможность вручную выбирать режим вождения, например, из: спортивного режима, в котором транспортное средство движется с превосходной способностью к ускорению, и подвеска задается в определенной степени жесткой, нормального режима, в котором транспортное средство ускоряется на относительно низкой скорости и имеет характеристику относительно мягкой подвески, и экономичного режима, в котором предпочтительным является экономия или эффективность использования топлива, посредством управления переключателем.
Кроме того, предложены различные системы, которые выполнены с возможностью отражения общего стиля управляемости посредством управления поведением транспортного средства. Этот тип системы не требует операций переключения и разрешает изменения незначительных или подробных характеристик. Один пример такой системы описан в публикации заявки на патент Японии № 06-249007 (JP 06-249007 А). В системе, описанной в JP 06-249007 А, которая является системой управления движущей силой с использованием нейрокомпьютера, взаимосвязь ускорения относительно хода ускорения и скорости транспортного средства распознается в качестве модели требуемого ускорения, и открытие дросселя вычисляется на основе отклонения между этой моделью и второй моделью опорного ускорения, которая отражает общий стиль или предпочтения водителя в связи с движением, и отклонения между второй моделью опорного ускорения и первой моделью опорного ускорения в качестве стандартной модели.
Кроме того, система, которая выполнена с возможностью определять характеристики вождения или общий стиль вождения при отличии характеристик продольного направления транспортного средства от характеристик поперечного направления, описана в публикации заявки на патент Японии № 11-129924 (JP 11-129924 А). Система, описанная в JP 11-129924 A, получает модель ускорения/торможения водителя на основе информации ввода управляющего сигнала, например, рабочей величины педали акселератора или педали тормоза, и информации поведения, например, продольного ускорения, и также получает модель руления от водителя на основе информации поперечных операций, например, угла поворота колес, и информации поперечного поведения, например, скорости рыскания.
Обе из систем, описанных в JP 06-249007 А и JP 11-129924 А, выполнены с возможностью определения взаимосвязи между величиной операции, выполняемой водителем, и величиной изменения поведения транспортного средства, достигаемой посредством операции водителя. Аналогично этим системам система, выполненная с возможностью оценки стиля или предпочтения при вождении с использованием переменных, ассоциированных с операциями вождения, которые извлекаются из операций водителя, описана в публикации заявки на патент Японии № 09-242863 (JP 09-242863 А). В частности, система, описанная в JP 09-242863 А, выполнена с возможностью оценки общего стиля вождения транспортного средства на основе вывода нейронной сети, которая принимает, по меньшей мере, одно из выходной рабочей величины во время старта транспортного средства, максимальной скорости изменения выходной рабочей величины, максимального замедления в ходе торможения транспортного средства, времени движения по инерции транспортного средства и времени движения транспортного средства на постоянной скорости.
С другой стороны, система, инструктирующая отражение общего стиля вождения и дорожных условий посредством управления переключением передач, описана в публикации заявки на патент Японии № 07-156815 (JP 07-156815 А). Общий стиль вождения обозначается как "резкость" в JP 07-156815 А, и резкость, представляющая условия вождения водителя, оценивается посредством получения частотного распределения для каждого из рабочих параметров транспортного средства, включающих в себя скорость транспортного средства, ход педали акселератора и продольное ускорение и поперечное ускорение транспортного средства, и ввода среднего значения и распределения каждого частотного распределения в нейронную сеть.
Система управления движущей силой, которая направлена на выполнение управления движущей силой, которое более точно отражает намерение водителя, представленное посредством рабочей величины транспортного средства, описана в публикации заявки на патент Японии № 2008-120172 (JP 2008-120172 А). Система, описанная в JP 2008-120172 А, управляет скоростью транспортного средства на основе фактической скорости транспортного средства и целевой скорости транспортного средства, заданных на основе намерения водителя, и изменяет способ управления скоростью транспортного средства согласно поперечному ускорению так, что степень изменения изменяется на основе относительной скорости транспортного средства между фактической скоростью транспортного средства и целевой скоростью транспортного средства.
Система управления переключением передач, точно определяющая намерение водителя в отношении движения и выполнять управление переключением передач, которое отражает намерение водителя, описана в публикации заявки на патент Японии № 2004-257434 (JP 2004-257434 А). В системе, как описано в JP 2004-257434 А, абсолютное значение ускорения транспортного средства интегрируется для каждого данного периода времени так, что интеграл обновляется. Когда интеграл превышает первое опорное значение, первый график переключения передач изменяется на второй график переключения передач, причем линии переключения передач в области, по меньшей мере, части первого графика переключения передач изменяются на линии переключения передач на более высокой скорости транспортного средства, и управление переключением передач выполняется на основе второго графика переключения передач.
Помимо этого, система, изменяющая величину управления переключением передач в соответствии со степенью спортивности, описывается в протоколах 944 1994-10 (стр. 241-244) научных симпозиумов, проводимых ассоциацией инженеров автомобилестроения Японии. Система может изменять скорость транспортного средства согласно градиенту дороги и манере вождения и выполнена с возможностью определять манеру вождения на основе степени спортивности. Степень спортивности определяется на основе большего значения из нагрузки на двигатель и степени нагрузки на шины, причем степень нагрузки на шины представляется посредством степени нагрузки относительно предельной силы трения шины.
Хотя системы, описанные в JP 06-249007 А, JP 11-129924 А, JP 09-242863 А, JP 07-156815 А, JP 2008-120172 А, JP 2004-257434 А и в протоколах 944 1994-10 (стр. 241-244) научных симпозиумов, проводимых ассоциацией инженеров автомобилестроения Японии, выполняют управление, которое отражает намерение водителя в отношении движения, системы оставляют запас для совершенствования.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает систему управления транспортного средства, которая инструктирует точное отражение предпочтений и намерений водителя в отношении движения или состояний движения транспортного средства посредством характеристик движения, например поведения транспортного средства или ускорения.
Система управления транспортного средства согласно первому аспекту изобретения, которая получает индекс на основе состояния движения транспортного средства и изменяет характеристику движения транспортного средства согласно индексу, включает в себя средство задания индекса для внесения изменения в индексе в ответ на изменение состояния движения в направлении к резкому движению транспортного средства быстрее изменения в индексе в ответ на изменение состояния движения в таком направлении, чтобы уменьшать резкость, с которой движется транспортное средство.
Согласно системе управления транспортного средства первого аспекта изобретения, индекс на основе состояния движения транспортного средства изменяется относительно быстро в направлении, в котором резкость движения транспортного средства увеличивается, а не в направлении, в котором резкость уменьшается. Как результат, транспортное средство, управляемое посредством системы управления транспортного средства, предоставляет характеристики движения, подходящие для окружения движения, например типа дороги, по которой транспортное средство движется, и общего стиля вождения.
В системе управления транспортного средства согласно первому аспекту изобретения, индекс может увеличиваться так, что он увеличивает резкость, с которой движется транспортное средство, и средство задания индекса может увеличивать индекс при изменении состояния движения, когда состояние движения изменяется в таком направлении, чтобы увеличивать индекс, в то время как средство задания индекса может уменьшать индекс с задержкой относительно изменения состояния движения, когда состояние движения изменяется в таком направлении, чтобы уменьшать индекс.
В системе управления транспортного средства согласно первому аспекту изобретения, состояние движения может включать в себя составное ускорение, включающее в себя компонент продольного ускорения и компонент поперечного ускорения транспортного средства, и средство задания индекса может задавать индекс равным большему значению по мере того, как составное ускорение становится больше.
Поскольку транспортное средство подвергается не только продольному ускорению, но также и ускорениям в поперечном направлении и направлении поворота во время движения, система управления транспортного средства согласно первому аспекту изобретения определяет индекс так, что индекс отражает эти ускорения. Другими словами, индекс может отражать фактическое поведение транспортного средства с повышенной точностью.
В системе управления транспортного средства согласно первому аспекту изобретения, составное ускорение может включать в себя ускорение, полученное посредством комбинирования абсолютных значений компонентов ускорения в, по меньшей мере, двух направлениях, включающих в себя компонент продольного ускорения и компонент поперечного ускорения.
В системе управления транспортного средства согласно первому аспекту изобретения, составное ускорение может включать в себя ускорение, представленное посредством квадратного корня суммы квадратов соответствующих компонентов ускорения во множестве направлений.
В системе управления транспортного средства согласно второму аспекту изобретения, которая изменяет характеристику движения в качестве тенденции изменения в поведении транспортного средства на основе состояния движения транспортного средства, транспортное средство включает в себя возможность изменения характеристики движения, и состояние движения транспортного средства включает в себя ускорение в направлении движения с уклоном, включающее в себя продольный компонент и поперечный компонент, причем направление движения с уклоном наклонено относительно продольного направления и поперечного направления транспортного средства на горизонтальной плоскости. Система управления транспортного средства включает в себя средство изменения характеристик для изменения характеристики движения транспортного средства посредством изменения рабочего режима актуатора на основе ускорения в направлении движения с уклоном.
Согласно системе управления транспортного средства второго аспекта изобретения, рабочий режим актуатора изменяется на основе ускорений во множестве направлений транспортного средства с тем, чтобы изменять характеристику движения. Таким образом, система управления транспортного средства может задавать характеристику движения так, что она отражает фактическое поведение транспортного средства с повышенной точностью.
Система управления транспортного средства согласно третьему аспекту изобретения, которая изменяет характеристику движения в качестве тенденции изменения поведения транспортного средства на основе ускорения, включающего в себя компоненты ускорения во множестве направлений, включает в себя средство синтезирования для внесения изменения в характеристику движения на основе компонента ускорения в одном из вышеуказанного множества направлений, отличающегося от изменения характеристики движения на основе компонента ускорения в другом направлении.
Согласно системе управления транспортного средства третьего аспекта изобретения, когда характеристика движения транспортного средства изменяется так, что она отражает ускорения в двух или более направлениях, влияние изменения на ускорение, фактически применяемое к транспортному средству, и поведение транспортного средства варьируются в зависимости от направления ускорения; следовательно, различие может отражаться за счет характеристики движения, когда она изменяется.
В системе управления транспортного средства третьего аспекта изобретения компоненты ускорения во множестве направлений включают в себя продольное ускорение при снижении скорости транспортного средства и продольное ускорение при увеличении скорости транспортного средства; и продольное ускорение при снижении скорости и продольное ускорение при увеличении скорости корректируются посредством, по меньшей мере, одной из операции нормализации, операции взвешивания и комбинации операции нормализации и операции взвешивания, так что влияние продольного ускорения при увеличении скорости превышает влияние продольного ускорения при снижении скорости.
Система управления транспортного средства согласно четвертому аспекту изобретения, которая изменяет характеристику движения транспортного средства согласно индексу на основе состояния движения транспортного средства, включает в себя средство изменения индекса для изменения индекса так, что он предоставляет такую характеристику движения, при которой резкость в движении транспортного средства увеличивается по мере того, как, по меньшей мере, одно из истекшего времени, пройденного расстояния и составного ускорения в течение времени после начала движения транспортного средства увеличивается.
Согласно системе управления транспортного средства четвертого аспекта изобретения, индекс увеличивается с течением времени после того, как транспортное средство начинает движение, или индекс увеличивается с увеличением пройденного расстояния или с увеличением составного ускорения в течение времени, так что резкость движения повышается согласно индексу.
В системе управления транспортного средства согласно четвертому аспекту изобретения, индекс может увеличиваться так, что он увеличивает резкость в движении транспортного средства, и средство изменения индекса может задавать индекс равным большему значению по мере того, как составное ускорение, которое включает в себя компоненты ускорения, по меньшей мере, в двух направлениях, включающие в себя компонент продольного ускорения и компонент поперечного ускорения транспортного средства, увеличивается.
В системе управления транспортного средства согласно первому аспекту изобретения, средство задания индекса может многократно получать индекс во время движения транспортного средства, и средство задания индекса может включать в себя средство поддержания индекса для поддержания индекса на полученном значении, когда полученное значение индекса превышает последнее значение, и средство уменьшения индекса для уменьшения значения индекса, поддерживаемого посредством средства поддержания индекса, при предварительно определенном условии. Предварительно определенное условие может удовлетворяться в зависимости от продолжительности, в течение которой индекс сохраняется меньшим значения, поддерживаемого посредством средства поддержания индекса.
Согласно системе управления транспортного средства первого аспекта изобретения, если индекс становится большим значением вследствие изменения состояния движения, индекс сохраняется на большом значении; тем самым индекс обновляется каждый раз, когда получается значение, большее, чем текущее значение. С другой стороны, даже если значение индекса, полученное на основе состояния движения, меньше предыдущего значения, индекс поддерживается на предыдущем значении до тех пор, пока условие, с точки зрения времени, не удовлетворяется, и затем уменьшается, когда условие удовлетворяется. Соответственно, индекс и характеристика движения на основе индекса уменьшаются на меньшей скорости или уменьшенной частоте, чем скорость или частота в случае, когда они увеличиваются.
В системе управления транспортного средства согласно первому аспекту изобретения, условие может включать в себя такое условие, что значение, полученное посредством интегрирования отклонения между полученным значением индекса и значением индекса, поддерживаемого посредством средства поддержания индекса относительно времени, превышает предварительно определенное значение.
Согласно системе управления транспортного средства первого аспекта изобретения, чтобы задерживать уменьшение индекса, вычисляется значение интеграла отклонения или разности между индексом, поддерживаемым на данном значении, и индексом, полученным в каждый момент времени, относительно времени, и значение индекса поддерживается на данном значении до тех пор, пока значение интеграла не становится равным предварительно определенному значению, даже если в данный момент полученное значение индекса является относительно низким. Затем, если значение в текущий момент полученного индекса становится близким или превышающим значение, поддерживаемое на данном значении, значение интеграла сбрасывается, и уменьшение индекса может быть дополнительно задержано.
В системе управления транспортного средства согласно первому аспекту изобретения, когда значение интеграла по времени отклонения между полученным значением индекса и значением индекса, поддерживаемого посредством средства поддержания индекса, равно или меньше предварительно определенного порогового значения, средство задания индекса может сбрасывать значение интеграла по времени отклонения и может возвращать значение интеграла по времени отклонения к нулю.
В системе управления транспортного средства согласно первому аспекту изобретения, средство уменьшения индекса может задерживать удовлетворение условия, когда значение интеграла по времени отклонения между полученным значением индекса и значением индекса, поддерживаемого посредством средства поддержания индекса, равно или меньше предварительно определенного порогового значения.
В системе управления транспортного средства согласно первому аспекту изобретения, средство уменьшения индекса может уменьшать значение индекса на уменьшенной скорости, когда истекшее время до тех пор, пока условие не удовлетворяется, является относительно длительным по сравнению со случаем, когда истекшее время является относительно коротким.
Согласно системе управления транспортного средства первого аспекта изобретения, индекс уменьшается на меньшей скорости, когда требуется длительное время до тех пор, пока условие для уменьшения не удовлетворяется, чем скорость в случае, если требуется короткое время до тех пор, пока условие для уменьшения не удовлетворяется, так что индекс может задаваться равным значению, которое является более подходящим для окружения движения или намерения в отношении движения.
В системе управления транспортного средства согласно первому аспекту изобретения, средство задания индекса может получать накопленное значение времени отклонения посредством уменьшения накопленного значения времени отклонения, когда удовлетворение условия задерживается.
Согласно системе управления транспортного средства первого аспекта изобретения, когда разность между значением индекса, поддерживаемого на данном значении, и новым, полученным значением индекса является небольшой, состояние движения в это время не рассматривается в качестве фактора или причины изменения индекса. Соответственно, прекращается накопление истекшего времени, на основе которого удовлетворяется условие, либо накопленное время уменьшается с тем, чтобы не допускать изменения (уменьшения) характеристики движения с чрезмерной чувствительностью.
В системе управления транспортного средства согласно второму аспекту изобретения, актуатор может включать в себя, по меньшей мере, одно из актуатора, изменяющего открытие дросселя двигателя, установленного на транспортном средстве, актуатора, изменяющего передаточное число автоматической трансмиссии, установленной на транспортном средстве, актуатора, предоставляемого в механизме подвески транспортного средства и изменяющего характеристику подвески, актуатора, изменяющего характеристику поворачиваемости транспортного средства, и актуатора, изменяющего соотношение мощности, распределенной на передние колеса и задние колеса транспортного средства.
Согласно системе управления транспортного средства второго аспекта изобретения, характеристики актуаторов, связанные с характеристикой ускорения, характеристикой поворачиваемости и характеристикой демпфирования вибрации транспортного средства, могут быть заданы подходящими для окружения движения или общего стиля вождения.
В системе управления транспортного средства согласно первому аспекту изобретения, транспортное средство может включать в себя источник мощности приведения в движение и механизм управления частотой вращения, который управляет частотой вращения источника мощности приведения в движение, и система управления транспортного средства дополнительно может включать в себя средство вычисления частоты вращения в спортивном режиме для определения целевой частоты вращения источника мощности приведения в движение на основе индекса, средство вычисления частоты вращения в нормальном режиме для определения целевой частоты вращения источника мощности приведения в движение на основе хода педали акселератора, управляемой водителем, и скорости транспортного средства; и средство указания конечной частоты вращения для управления механизмом управления частотой вращения так, что она достигает целевой частоты вращения, которая является большим значением из целевой частоты вращения, определенной посредством средства вычисления частоты вращения в спортивном режиме, и целевой частоты вращения, определенной посредством средства вычисления частоты вращения в нормальном режиме.
Согласно системе управления транспортного средства согласно первому аспекту изобретения, когда целевая частота вращения источника мощности приведения в движение, полученная на основе индекса, превышает целевую частоту вращения, полученную на основе запрашиваемой величины движущей силы, представленной посредством хода педали акселератора или открытия дросселя, частота вращения источника мощности приведения в движение управляется так, что она достигает большей частоты вращения. Следовательно, когда рабочие характеристики ускорения, которые превышают рабочие характеристики ускорения, соответствующие индексу, запрашиваются, запрос ускорения может отражаться посредством управления транспортным средством. Следовательно, транспортное средство может управляться так, что оно удовлетворяет намерению водителя с повышенной точностью.
Система управления транспортного средства согласно первому аспекту изобретения дополнительно может включать в себя средство для поддержания целевой частоты вращения, определенной посредством средства вычисления частоты вращения в спортивном режиме, когда транспортное средство поворачивает.
В системе управления транспортного средства согласно первому аспекту изобретения, когда целевая частота вращения, определенная посредством средства вычисления частоты вращения в нормальном режиме, превышает целевую частоту вращения, определенную посредством средства вычисления частоты вращения в спортивном режиме, средство указания конечной частоты вращения может управлять механизмом управления частотой вращения так, что она достигает частоты вращения, полученной посредством интерполяции разности между целевой частотой вращения, определенной посредством средства вычисления частоты вращения в спортивном режиме в настоящее время, и частотой вращения, которая приводит к максимальному ускорению, которое формируется в транспортном средстве, на основе запрашиваемой величины движущей силы.
Согласно системе управления транспортного средства первого аспекта изобретения, когда запрос ускорения, которое превышает рабочие характеристики ускорения, соответствующие индексу, выполняется, частота вращения источника мощности приведения в движение, полученная посредством деления избытка ускорения вплоть до максимальной частоты вращения в это время согласно запрашиваемой величине движущей силы, достигается, чтобы разрешать управление, которое отражает запрашиваемую величину движущей силы с повышенной точностью.
В системе управления транспортного средства первого аспекта изобретения, в то время как индекс увеличивается, система управления транспортного средства может не выполнять управление для улучшения эффективности ускорения транспортного средства до тех пор, пока индекс не достигнет первого порогового значения, и может выполнять управление для улучшения эффективности ускорения транспортного средства после того, как индекс достигнет первое пороговое значение; и в то время как индекс снижается, система управления транспортного средства может выполнять управление для улучшения эффективности ускорения транспортного средства до тех пор, пока индекс не достигнет второго порогового значения, меньшего первого порогового значения, даже если индекс достигает первое пороговое значение, и может запрещать управление для улучшения эффективности ускорения транспортного средства после того, как индекс достигнет второе пороговое значение.
Согласно системе управления транспортного средства первого аспекта изобретения, когда индекс меньше предварительно определенного значения вследствие отсутствия резкого движения транспортного средства или операции резкого вождения транспортного средства, управление для улучшения эффективности ускорения на основе индекса не выполняется. Соответственно, даже если состояние движения транспортного средства временно изменяется, и индекс увеличивается по какой-либо причине в состоянии, в котором резкое движение или операция резкого вождения транспортного средства, в частности, не выполняется, изменение состояния движения или операции не отражается посредством управления для улучшения эффективности ускорения. Следовательно, транспортное средство может двигаться умеренно без особой резкости или с увеличенным комфортом во время езды. Наоборот, даже если индекс уменьшается до меньшего значения, чем первое пороговое значение в состоянии, в котором управление для улучшения эффективности ускорения на основе индекса выполняется, управление для улучшения эффективности ускорения на основе индекса продолжается, чтобы разрешать движение транспортного средства на основе предыдущей эффективности ускорения. Следовательно, транспортное средство может управляться так, что оно удовлетворяет намерению водителя с повышенной точностью. Таким образом, гистерезис может задаваться между началом управления для улучшения эффективности ускорения в ответ на увеличение значения индекса и завершением управления для улучшения эффективности ускорения в ответ на уменьшение значения индекса, чтобы не допускать периодического колебания управления.
Система управления транспортного средства первого аспекта изобретения дополнительно может включать в себя переключатель, который запрещает управление для изменения характеристики движения транспортного средства согласно индексу.
В системе управления транспортного средства первого аспекта изобретения средство задания индекса может многократно получать индекс во время движения транспортного средства; средство задания индекса может включать в себя средство поддержания индекса для поддержания индекса на полученном значении, когда полученное значение индекса превышает последнее значение, и средство уменьшения индекса для уменьшения значения индекса, поддерживаемого посредством средства поддержания индекса, на основе значения интеграла по времени отклонения между значением индекса, поддерживаемого посредством средства поддержания индекса, и полученным значением индекса и предварительно определенного порогового значения; и способ, которым уменьшается значение индекса, поддерживаемого посредством средства поддержания индекса, может быть изменен согласно значению интеграла по времени отклонения.
В системе управления транспортного средства первого аспекта изобретения средство задания индекса может многократно получать индекс во время движения транспортного средства; средство задания индекса может включать в себя средство поддержания индекса для поддержания индекса на полученном значении, когда полученное значение индекса превышает последнее значение, и средство уменьшения индекса для уменьшения значения индекса, поддерживаемого посредством средства поддержания индекса, на основе значения интеграла по времени отклонения между значением индекса, поддерживаемого посредством средства поддержания индекса, и полученным значением индекса и предварительно определенного порогового значения; и когда значение интеграла по времени отклонения снижается, значение индекса, поддерживаемого посредством средства поддержания индекса, может увеличиваться.
В системе управления транспортного средства первого аспекта изобретения средство задания индекса может многократно получать индекс во время движения транспортного средства; средство задания индекса может включать в себя средство поддержания индекса для поддержания индекса на полученном значении, когда полученное значение индекса превышает последнее значение, и средство уменьшения индекса для уменьшения значения индекса, поддерживаемого посредством средства поддержания индекса, на основе значения интеграла по времени отклонения между значением индекса, поддерживаемого посредством средства поддержания индекса, и полученным значением индекса и предварительно определенного порогового значения; и выходная характеристика источника приведения в движение относительно операции ускорения может быть изменена согласно значению индекса, поддерживаемого посредством средства поддержания индекса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеописанные и/или дополнительные цели, признаки и преимущества изобретения станут более очевидными из последующего описания примерных вариантов осуществления со ссылкой на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены идентичные элементы. На чертежах:
Фиг. 1 - вид, на котором значения определения продольного ускорения и поперечного ускорения проиллюстрированы на круге трения шины, согласно одному варианту осуществления изобретения;
Фиг. 2 - вид, показывающий пример изменений управляющего SPI на основе мгновенного SPI согласно одному варианту осуществления изобретения;
Фиг. 3 - вид, поясняющий интегрирование отклонения между мгновенным SPI и управляющим SPI относительно времени и случая, когда значение интеграла сбрасывается, согласно одному варианту осуществления изобретения;
Фиг. 4 - карта, указывающая взаимосвязь между управляющим SPI и требуемой максимальной величиной ускорения согласно одному варианту осуществления изобретения;
Фиг. 5 - вид, на котором требуемое ускорение на основе управляющего SPI добавляется на график, указывающий взаимосвязь между скоростью транспортного средства и ускорением для каждой требуемой частоты вращения согласно одному варианту осуществления изобретения, и вид, показывающий процесс получения конечной указанной частоты вращения на основе вышеуказанного вида;
Фиг. 6 - вид, на котором требуемое ускорение на основе управляющего SPI добавляется на график, указывающий взаимосвязь между скоростью транспортного средства и ускорением для каждого положения передачи, и вид, показывающий процесс получения окончательно указанного положения передачи на основе вышеуказанного вида;
Фиг. 7 - блок-схема управления для инструктирования управления переключением передач и управления выходной мощностью двигателя отражения корректирующего положения передачи и корректирующей движущей силы, полученных на основе управляющего SPI в транспортном средстве, в котором устанавливается автоматическая трансмиссия, имеющая два или более положений передачи, согласно одному варианту осуществления изобретения;
Фиг. 8 - блок-схема другого управления для инструктирования управления переключением передач и управления выходной мощностью двигателя отражения корректирующего положения передачи и корректирующей движущей силы, полученных на основе управляющего SPI в транспортном средстве, на котором устанавливается автоматическая трансмиссия, имеющая два или более положений передачи, согласно одному варианту осуществления изобретения;
Фиг. 9 - блок-схема дополнительного управления для инструктирования управления переключением передач и управления выходной мощностью двигателя отражения корректирующего положения передачи и корректирующей движущей силы, полученных на основе управляющего SPI в транспортном средстве, на котором устанавливается автоматическая трансмиссия, имеющая два или более положений передачи, согласно одному варианту осуществления изобретения;
Фиг. 10 - блок-схема управления для инструктирования характеристики рулевого управления отражения корректирующего передаточного отношения и корректирующего усиливающего крутящего момента, полученных на основе управляющего SPI согласно одному варианту осуществления изобретения;
Фиг. 11 - блок-схема управления для инструктирования характеристики подвески отражения высоты транспортного средства, корректирующего коэффициента демпфирования и корректирующей жесткости пружины, полученных на основе управляющего SPI согласно одному варианту осуществления изобретения;
Фиг. 12 - схематичный вид одного примера транспортного средства, к которому может применяться настоящее изобретение;
Фиг. 13 - блок-схема последовательности операций способа, иллюстрирующая пример управления для переключения между выполнением координации между спортивным режимом и нормальным режимом и отсутствием выполнения или запрещением координации, согласно одному варианту осуществления изобретения; и
Фиг. 14 - вид, показывающий другую карту, которая задает взаимосвязь между управляющим SPI и требуемой максимальной величиной ускорения согласно одному варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее подробнее описывается один вариант осуществления настоящего изобретения. Вариант осуществления применяется к транспортным средствам, которые ускоряются, замедляются и выполняют повороты, в соответствии с операциями водителя, и типичным примером транспортных средств является автомобиль, имеющий двигатель внутреннего сгорания и/или электродвигатель в качестве источника мощности приведения в движение. Один пример транспортного средства проиллюстрирован на блок-схеме с фиг. 12. Транспортное средство 1, показанное на фиг. 12, включает в себя четыре колеса, т.е. два передних колеса 2 в качестве рулевых колес и два задних колеса 3 в качестве ведущих колес. Каждое из этих четырех колес 2, 3 крепится к кузову транспортного средства (не показан) через систему 4 подвески. Система 4 подвески преимущественно состоит из пружины и амортизатора (демпфера), аналогично общеизвестной системе подвески, и амортизатор 5 проиллюстрирован на фиг. 12. Амортизатор 5, показанный на фиг. 12, осуществляет действие амортизации или буферизации с использованием гидравлического сопротивления текучей среды, например газа или жидкости, и имеет такую структуру, что абсолютная величина гидравлического сопротивления может быть изменена посредством актуатора, например, электродвигателя 6. Когда гидравлическое сопротивление увеличивается, кузов транспортного средства с меньшей вероятностью проседает, тем самым приводя к жесткой или тряской езде, и когда транспортное средство работает в таком режиме, оно предоставляет уменьшенный комфорт во время езды и усиленное спортивное ощущение. Система 4 подвески может быть выполнена с возможностью регулировать высоту транспортного средства посредством подачи или выпуска сжатого газа в или из амортизатора 5.
Каждое из передних и задних колес 2, 3 содержит тормозное устройство (не показано). Когда нажимается педаль 7 тормоза, расположенная у сиденья водителя, тормозные устройства работают так, что они обеспечивают тормозную силу передним и задним колесам 2, 3.
Источник мощности приведения в движение транспортного средства 1 является общеизвестным источником мощности приведения в движение, например двигателем внутреннего сгорания, электромотором или комбинацией вышеозначенного. Двигатель внутреннего сгорания (или двигатель) 8 устанавливается на транспортном средстве, показанном на фиг. 12, и дроссельный клапан 10 для управления объемом всасываемого воздуха располагается во впускной трубе 9 двигателя 8. Дроссельный клапан 10, который является электронным дроссельным клапаном, выполнен с возможностью открываться и закрываться посредством актуатора 11 с электрическим управлением, например, электродвигателя, так что открытие дроссельного клапана 10 регулируется по мере необходимости. Актуатор 11 выполнен с возможностью работать в соответствии с величиной нажатия педали акселератора 12, расположенной в сиденье водителя, т.е. ходом педали акселератора, так что он управляет открытием дроссельного клапана 10 до определенного открытия дросселя.
Взаимосвязь между ходом педали акселератора и открытием дросселя может задаваться надлежащим образом. По мере того как взаимосвязь между этими величинами становится ближе к однозначной взаимосвязи, водитель с большей вероятностью должен непосредственно ощущать взаимосвязь, и транспортное средство предоставляет соревновательное ощущение или ощущение гонки в качестве характеристики движения. Наоборот, если взаимосвязь задается так, что открытие дросселя является небольшим относительно хода педали акселератора, характеристика поведения или характеристика ускорения (т.е. характеристика движения) транспортного средства становится умеренной. В случае, если электродвигатель используется в качестве источника мощности приведения в движение, контроллер электрического тока, например инвертор или преобразователь, предоставляется вместо дроссельного клапана 10, и ток управляется в соответствии с ходом педали акселератора. Кроме того, взаимосвязь между значением тока и ходом педали акселератора, а именно характеристикой поведения или характеристикой ускорения (т.е. характеристикой движения), изменяется надлежащим образом.
Трансмиссия 13 соединяется с выходной стороной двигателя 8. Трансмиссия 13 выполнена с возможностью надлежащим образом изменять передаточное число, т.е. соотношение между входной частотой вращения и выходной частотой вращения. Например, трансмиссия 13 является общеизвестной автоматической трансмиссией, имеющей два или более положений передачи, или бесступенчатой трансмиссией, такой как ременная бесступенчатая трансмиссия (ременная CVT) или тороидальная CVT. Трансмиссия 13 включает в себя актуатор (не показан), и актуатор надлежащим образом управляется так, чтобы изменять передаточное число пошагово (в шагах) или изменять передаточное число непрерывно. В частности, заранее подготавливается карта переключения передач, в которой передаточное число определяется относительно условий работы транспортного средства, например хода педали акселератора на основе операции ускорения, выполняемой водителем, и скорости транспортного средства, и управление переключением передач выполняется согласно карте переключения передач. Альтернативно, целевой вывод или мощность вычисляется на основе условий работы транспортного средства, таких как скорость транспортного средства и ход педали акселератора, и целевая частота вращения двигателя получается из целевого вывода и оптимального потребления топлива. Затем, управление переключением передач выполняется так, чтобы достичь целевой частоты вращения двигателя.
В отличие от базового управления переключением передач, как описано выше, может выбираться управление, которое предоставляет более высокий приоритет экономии топлива, или управление для увеличения движущей силы. При управлении, которое предоставляет более высокий приоритет экономии топлива, переключение коробки передач на более высокую передачу выполняется на относительно низкой скорости транспортного средства, или передаточное отношение или передаточное число для относительно высокой скорости используется на низкой скорости транспортного средства. При управлении для повышения движущей силы или характеристики ускорения переключение коробки передач на более высокую передачу выполняется на относительно высокой скорости транспортного средства, передаточное отношение или передаточное число для относительно низкой скорости используется на высокой скорости транспортного средства. Эти режимы управления могут выполняться посредством переключения карт переключения передач или коррекции запрашиваемой величины движущей силы, или коррекции вычисленного передаточного числа. Механизм передачи энергии, например преобразователь крутящего момента, оснащенный блокировочной муфтой, может предоставляться по мере необходимости между двигателем 8 и трансмиссией 13. Выходной вал трансмиссии 13 соединяется с задними колесами 3 через дифференциал 14, выступающий в качестве главной передачи.
Теперь будет описан механизм 15 рулевого управления, поворачивающий передние колеса 2. Рулевой привод 17 передает вращательное движение руля 16 на правое переднее и левое переднее колеса 2, и усиливающий механизм 18 увеличивает силу поворота колес относительно угла поворота колес руля 16. Усиливающий механизм 18 включает в себя актуатор (не показан) и выполнен с возможностью регулирования величины усиливающей силы или крутящего момента, предоставляемого посредством актуатора. Более конкретно, по мере того, как величина усиливающей силы снижается, взаимосвязь между силой поворота колес и фактической вращающей силой, применяемой к передним колесам 2, становится ближе к однозначной взаимосвязи, тем самым заставляя водителя более непосредственно ощущать рулевое управление и предоставляя соревновательное ощущение или ощущение гонки в качестве характеристики движения транспортного средства. В этом случае взаимосвязь между углом поворота колес и фактическим углом поворота передних колес 2 становится близкой к однозначной взаимосвязи. Кроме того, в варианте осуществления передаточное отношение механизма электроусилителя руля (EPS) может уменьшаться по мере того, как управляющий SPI увеличивается, чтобы предоставлять быструю характеристику. Хотя передаточное отношение увеличивается по мере того, как скорость транспортного средства увеличивается, если управляющий SPI является идентичным значением, передаточное отношение может уменьшаться по мере того, как управляющий SPI увеличивается, если скорость транспортного средства является неизменной. Хотя не проиллюстрировано конкретно на чертежах, транспортное средство 1 содержит антиблокировочную тормозную систему (ABS), систему управления тягой и/или систему управления стабильностью транспортного средства (VSC), которая управляет этими системами интегрированным способом, в качестве системы для стабилизации поведения или положения транспортного средства 1. Эти системы общеизвестны в данной области техники и выполнены с возможностью предотвращать либо подавлять блокировку или проскальзывание колес транспортного средства 2, 3 и стабилизировать поведение транспортного средства посредством уменьшения тормозной силы, применяемой к колесам 2, 3, на основе разности между скоростью кузова транспортного средства и скоростью вращения колес транспортного средства, или применения тормозной силы к колесам 2, 3 и управления крутящим моментом двигателем в дополнение к управлению тормозной силой. Транспортное средство 1 также может содержать навигационную систему, допускающую получение данных (т.е. окружения движения) относительно дороги, по которой транспортное средство движется, или дороги или маршрута, вдоль которого транспортное средство, как предполагается, движется, и переключатель для выбора вручную режима движения, например, из спортивного режима, нормального режима и режима с низким расходом топлива (экономичного режима). Кроме того, транспортное средство 1 может быть оснащено механизмом привода на четыре колеса (4WD), допускающим изменение характеристик движения, например эффективности ускорения для возможности преодоления подъемов или возможности ускорения и поворачиваемости.
Различные датчики обеспечиваются для получения данных, используемых для управления двигателем 8, трансмиссией 13, амортизатором 5 системы 4 подвески, усиливающим механизмом 19 и вышеописанными системами, которые не проиллюстрированы. Датчики включают в себя, например, датчик 19 скорости вращения колес транспортного средства, который определяет скорости вращения передних и задних колес 2, 3, датчик 20 хода при ускорении, датчик 21 открытия дросселя, датчик 22 частоты вращения двигателя, датчик 23 выходной частоты вращения, который определяет частоту вращения выходного вала трансмиссии 13, датчик 24 угла поворота колес, датчик 25 продольного ускорения, который определяет продольное ускорение (Gx), датчик 26 поперечного ускорения, который определяет ускорение (поперечное ускорение Gy) поперечного направления, датчик 27 скорости рыскания и т.д. В этой связи датчики ускорения, используемые при управлении поведением транспортного средства относительно антиблокировочной тормозной системы (ABS), системы управления стабильностью транспортного средства (VSC) и т.п., также могут быть использованы в качестве датчиков 25, 26 ускорения. В транспортном средстве с установленной подушкой (подушками) безопасности датчики ускорения, предусмотренные для управления срабатыванием подушки (подушек) безопасности, также могут быть использованы в качестве датчиков 25, 26 ускорения. Кроме того, продольное и поперечное ускорения Gx, Gy могут получаться непосредственно из значения определения, определяемого посредством датчика ускорения, размещаемого так, что он наклонен под данным углом (например, 45°) относительно продольного направления транспортного средства на горизонтальной плоскости, или могут получаться посредством разложения значения определения на продольное ускорение и поперечное ускорение. Кроме того, продольное и поперечное ускорения Gx, Gy могут быть вычислены на основе хода педали акселератора, скорости транспортного средства, нагрузки при движении, угла поворота колес и т.д., вместо определения посредством датчиков. Эти датчики 19-27 выполнены с возможностью передавать сигналы определения (данные) в электронный модуль 28 управления (ЭМУ), и электронный модуль 28 управления выполнен с возможностью осуществлять вычисления согласно вышеуказанным данным, предварительно сохраненным данным и программам и выводить результаты вычислений в качестве сигналов команды управления в вышеописанные системы или их актуаторы. Составное ускорение не ограничивается ускорением, включающим в себя компоненты ускорения во множестве направлений, например ускорением, включающим в себя компонент ускорения в продольном направлении транспортного средства и компонент ускорения в направлении ширины (поперечном направлении) транспортного средства. Ускорение только в одном направлении может использоваться в качестве составного ускорения. Например, только ускорение в продольном направлении транспортного средства может использоваться в качестве составного ускорения.
Система управления транспортного средства согласно настоящему изобретению выполнена с возможностью инструктировать отражение состояния движения транспортного средства посредством управления поведением (управления движением) транспортного средства. Состояние движения транспортного средства, упомянутое в данном документе, представляется посредством продольного ускорения или поперечного ускорения, или углового ускорения рыскания или крена, или составного ускорения, в котором ускорения двух или более направлений комбинируются. Когда транспортное средство движется на заданной скорости или едет в целевом направлении, или когда поведение транспортного средства возвращается в исходное состояние в ответ на влияние окружения движения, например поверхности дороги, ускорения обычно возникают в двух или более направлениях. В связи с вышеизложенным считается, что состояние движения транспортного средства в определенной степени отражает окружение движения или общий стиль вождения. На основе исходных данных система управления транспортного средства по настоящему изобретению выполнена так, что управление поведением транспортного средства отражает состояние движения транспортного средства.
Как описано выше, поведение транспортного средства включает в себя, например, характеристику ускорения, характеристику поворачиваемости, поддерживающую жесткость (т.е. степень или вероятность подскакивания или подпрыгивания), предоставляемую посредством системы 4 подвески, степень крена или "галопирования" и т.д. Система управления транспортного средства согласно настоящему изобретению изменяет эти характеристики движения на основе вышеописанного состояния движения. В этом случае характеристики движения могут быть изменены посредством использования ускорения в определенном направлении или составном ускорении как есть, в качестве одного примера состояния движения. Тем не менее, чтобы уменьшать ощущение дискомфорта, может быть использован индекс, полученный посредством коррекции вышеуказанного ускорения или составного ускорения.
Описывается индекс SPI спортивности в качестве одного примера индекса. Индекс SPI спортивности является индексом, указывающим намерение водителя или состояние движения транспортного средства. Индекс SPI спортивности, который может использоваться в варианте осуществления, является индексом, полученным посредством комбинирования ускорений (в частности, их абсолютных значений) в двух или более направлениях, и ускорения, полученного посредством комбинирования продольного ускорения Gx, и поперечное ускорение Gy является примером ускорения, которое сильно связано с поведением транспортного средства в направлении движения. Например, мгновенный SPI вычисляется согласно следующему уравнению (1). Здесь, "мгновенный SPI" означает индекс или физическую величину, которая вычисляется на основе ускорений соответствующих направлений, каждое из которых получается с промежутками в момент во время движения транспортного средства. "Интервалы в момент" означают интервалы повторения, с которыми определение ускорений и вычисление мгновенного SPI на основе ускорений многократно выполняется в данной продолжительности цикла.
Мгновенный SPI=(Gx2+Gy2)1/2 (1)
Из продольного ускорения Gx, используемого в вышеуказанном уравнении (1), по меньшей мере, одно из ускорения на стороне ускорения и ускорения на стороне замедления (т.е. замедления) может подвергаться операции нормализации или операции взвешивания. А именно, когда ускорение на стороне замедления превышает ускорение на стороне ускорения в общих транспортных средствах, различие практически не ощущается или распознается водителем, и во многих случаях водитель распознает ускорения на стороне ускорения и на стороне замедления как практически в равной степени применяемые к транспортному средству.
Операция нормализации является операцией, чтобы уменьшать или исключать разность между фактическими значениями и тем, что ощущает водитель. Для продольного ускорения Gx нормализация является операцией, чтобы увеличивать ускорение на стороне ускорения или уменьшать ускорение на стороне замедления. Более конкретно, соотношение максимальных значений этих ускорений получается, и ускорение на стороне ускорения или на стороне замедления умножается на соотношение. Кроме того, операция взвешивания может выполняться для того, чтобы корректировать ускорение на стороне замедления относительно поперечного ускорения. В общем, операция взвешивания состоит в том, чтобы выполнять коррекцию посредством, например, назначения весового коэффициента, по меньшей мере, одному из продольных (вперед и назад) ускорений, так что максимальное ускорение в каждом направлении находится на круге данного радиуса, как в случае, когда продольная сила и поперечная сила, которые могут быть сформированы посредством шины, представляются посредством круга трения шины. Через операцию нормализации и операцию взвешивания, как описано выше, степени, на которые ускорение на стороне ускорения и ускорение на стороне замедления отражаются посредством характеристик движения, становятся отличающимися друг от друга. Продольное ускорение при снижении скорости и продольное ускорение при увеличении скорости могут подвергаться операции взвешивания в качестве одного примера операции взвешивания, так что степень влияния продольного ускорения при увеличении скорости превышает степень влияния продольного ускорения при снижении скорости.
Таким образом, существует разность между фактическим значением ускорения и тем, что ощущает водитель относительно ускорения, в зависимости от направления ускорения. Например, такое различие может существовать в угловом ускорении в направлении рыскания или направлении крена и ускорении в продольном направлении. Согласно варианту осуществления, следовательно, степени, на которые ускорения различных направлений отражаются посредством характеристик движения, могут варьироваться, другими словами, степень изменения характеристик движения на основе ускорения в определенном направлении может быть задана отличающейся от степени изменения характеристик движения на основе ускорения в другом направлении.
Фиг. 1 показывает пример, в котором значение датчика поперечного ускорения Gy и продольного ускорения Gx, для которого выполнены вышеописанная операция нормализации и операция взвешивания, проиллюстрировано на круге трения шины. Это пример, в котором транспортное средство движется вдоль тестового курса, который моделирует обычную дорогу. Из фиг. 1 в качестве общей тенденции наблюдается то, что поперечное ускорение Gy также с большой вероятностью становится большим, когда транспортное средство замедляется в значительной степени, и продольное ускорение Gx и поперечное ускорение Gy возникают вдоль круга трения шины.
Согласно варианту осуществления, управляющий SPI получается из вышеуказанного мгновенного SPI. Управляющий SPI является индексом, используемым при управлении для изменения характеристик движения. Управляющий SPI сразу увеличивается в ответ на увеличение мгновенного SPI, на основе которого вычисляется управляющий SPI, и снижается с задержкой в ответ на уменьшение мгновенного SPI. В частности, управляющий SPI уменьшается, когда определенное условие удовлетворяется. Фиг. 2 показывает изменения управляющего SPI, полученные на основе изменений мгновенного SPI. В примере, показанном на фиг 2, мгновенный SPI указывается посредством значений, проиллюстрированных на фиг. 1, как описано выше, тогда как управляющий SPI задается равным максимальному значению мгновенного SPI и сохраняется при этом значении (т.е. последнем значении) до тех пор, пока определенное условие не удовлетворяется. А именно, управляющий SPI является индексом, который изменяется, когда он увеличивается, и изменяется относительно медленно, когда он снижается.
Более конкретно, в период T1 времени с начала управления на фиг. 2, например, в случае, если транспортное средство замедляется и поворачивает, мгновенный SPI, полученный в каждом цикле, увеличивается и уменьшается согласно изменениям в ускорении. В этот период возникает мгновенный SPI, который превышает максимальное значение предыдущих циклов до того, как указанное определенное условие удовлетворяется; следовательно, управляющий SPI увеличивается в шагах, и увеличенный управляющий SPI поддерживается. С другой стороны, во время t2 и время t3, например, в случае, если транспортное средство, которое повернуло и ускоряется, начинает двигаться прямо и ускоряться, управляющий SPI уменьшается, поскольку условие для уменьшения удовлетворяется. Таким образом, условие для уменьшения управляющего SPI удовлетворяется, когда устанавливается условие, при котором управляющий SPI, сохраненный при предыдущем большом значении, как считается, не отражает намерение водителя. В варианте осуществления условие удовлетворяется после истечения указанного времени.
А именно, условие, при котором управляющий SPI, сохраненный на предыдущем значении, как считается, не отражает намерение водителя, является условием, при котором отклонение между управляющим SPI, который сохраняется на предыдущем значении, и мгновенным SPI, который возникает тем временем, является относительно большим, и отклонение продолжает быть большим, и отклонение накапливается. Соответственно, управляющий SPI не уменьшается вследствие мгновенного SPI, являющегося результатом, например, операции временного отпускания педали акселератора 12 водителем, например, когда транспортное средство управляется так, что оно поворачивает и ускоряется. Когда условие, при котором мгновенный SPI, являющийся результатом, например, операции непрерывного отпускания педали акселератора 12 водителем, ниже сохраненного управляющего SPI, продолжается в течение данного периода времени, например, когда транспортное средство постепенно замедляется, определяется то, что условие для уменьшения управляющего SPI удовлетворяется. Таким образом, условие для начала уменьшения управляющего SPI может быть длительностью, в течение которой мгновенный SPI сохраняется меньшим управляющего SPI. Условие для начала уменьшения управляющего SPI может состоять в том, что значение интеграла по времени (или накопленное значение) отклонения между сохраненным управляющим SPI и мгновенным SPI достигает предварительно определенного порогового значения, так что фактическое состояние движения более точно отражается посредством управляющего SPI. Пороговое значение может быть надлежащим образом задано посредством проведения опыта или моделирования, осуществляемого согласно намерению водителя. Во втором случае, когда используется значение интеграла по времени, управляющий SPI уменьшается с учетом отклонения между управляющим SPI и мгновенным SPI и временем, так что может выполняться управление для изменения характеристик движения, которое более точно отражает фактическое состояние движения или поведение.
В примере, как показано на фиг. 2, продолжительность, в течение которой управляющий SPI поддерживается при этом значении до тех пор, пока время t2 не достигается, превышает продолжительность, в течение которой управляющий SPI поддерживается при этом значении до тех пор, пока время t3 не достигается, поскольку выполняется следующее управление. Управляющий SPI увеличивается до данного значения на конечной стадии вышеуказанного периода T1 времени и поддерживается на данном значении; затем, мгновенный SPI увеличивается во время t1 до того, как удовлетворяется условие для начала уменьшения, как описано выше, и дополнительно, значение интеграла отклонения мгновенного SPI от управляющего SPI, поддерживаемого на данном значении, становится меньшим предварительно определенного значения. Предварительно определенное значение может быть надлежащим образом задано посредством эксперимента или моделирования, осуществляемого согласно намерению водителя или с учетом погрешности в вычислении мгновенного SPI. Таким образом, условие, при котором мгновенный SPI становится близким к управляющему SPI, поддерживаемому на данном значении, означает, что транспортное средство находится в состоянии ускорения или замедления, и/или состоянии поворота, которое приводит к мгновенному SPI, на основе которого управляющий SPI, поддерживаемый на данном значении, определен, или в условии, близком к состоянию ускорения или замедления и/или состоянию поворота. А именно, даже если определенная продолжительность истекает с момента времени, в котором управляющий SPI увеличен до значения, при котором поддерживается SPI, состояние движения аппроксимируется к состоянию движения, полученному в момент времени перед тем, как истекает указанное время; следовательно, даже если мгновенный SPI меньше поддерживаемого управляющего SPI, удовлетворение условия для начала уменьшения, как описано выше, задерживается, и управляющий SPI поддерживается при предыдущем данном значении. Управление или операция для задержки может выполняться посредством сброса суммы (накопленного значения) истекшего времени или значения интеграла отклонения, как описано выше, и повторного начала накопления истекшего времени или интегрирования отклонения или посредством вычитания данной величины из суммы (накопленного значения) или значения интеграла, или посредством прерывания накопления или интегрирования для указанного периода времени.
Фиг. 3 является схематичным видом, применимым для пояснения интегрирования вышеописанного отклонения и его сброса. Область заштрихованной части на фиг. 3 представляет значение интеграла отклонения. Во время этого процесса значение интеграла сбрасывается и возвращается к нулю во время t11, в которое разность между мгновенным SPI и управляющим SPI становится равной или меньшей предварительно определенного значения Δd, и интегрирование разности или отклонения начинается снова. А именно, значение интеграла сбрасывается на основе того, равна или меньше разность между мгновенным SPI, полученным в это время, и управляющим SPI, поддерживаемым на данном значении, порогового значения либо нет. Соответственно, условие для начала уменьшения управляющего SPI не удовлетворяется, и поэтому управляющий SPI сохраняется при ранее полученном данном значении. Затем, если мгновенный SPI становится превышающим поддерживаемый управляющий SPI после того, как интегрирование повторно начинается, управляющий SPI обновляется до большого значения, соответствующего мгновенному SPI, и поддерживается при этом значении, и вышеописанное значение интеграла сбрасывается.
Когда условие для начала управления для уменьшения управляющего SPI определяется на основе вышеуказанного значения интеграла, степень или скорость уменьшения управляющего SPI может варьироваться. Вышеописанное значение интеграла получается посредством интегрирования отклонения между поддерживаемым управляющим SPI и мгновенным SPI относительно времени; следовательно, если отклонение является большим, значение интеграла достигает предварительно определенного значения в относительно короткое время и удовлетворяется указанное условие. Если отклонение является небольшим, проходит относительно много времени до достижения значением интеграла предварительно определенного значения, так что удовлетворяется указанное условие.
Соответственно, степень или скорость уменьшения управляющего SPI может варьироваться, например, согласно продолжительности, истекшей до тех пор, пока не удовлетворяется условие для начала управления для уменьшения управляющего SPI, как описано выше. Если вышеуказанное условие удовлетворяется за короткое время, это означает, что мгновенный SPI меньше в значительной степени управляющего SPI, поддерживаемого на данном значении, и управляющий SPI значительно отклоняется от намерения водителя в это время. В этом случае, следовательно, управляющий SPI уменьшается в значительной степени или на высокой скорости. Наоборот, если проходит относительно много времени до тех пор, пока вышеуказанное условие не удовлетворяется, это означает, что мгновенный SPI меньше в небольшой степени управляющего SPI, поддерживаемого на данном значении, и нельзя сказать, что поддерживаемый управляющий SPI отклоняется очень значительно от намерения водителя в это время. В этом случае, следовательно, управляющий SPI медленно уменьшается в небольшой степени или на низкой скорости. Таким образом, можно быстро и надлежащим образом корректировать (уменьшать или исключать) несоответствие между управляющим SPI для задания характеристик движения и намерением водителя задавать характеристики движения транспортного средства, совпадающие с состоянием движения.
Управляющий SPI представляет состояния движения транспортного средства, которые включают в себя окружение движения, такие как градиент поверхности дороги, присутствие перекрестка и радиус кривизны перекрестка, а также общий стиль вождения водителя. А именно, ускорение транспортного средства изменяется в зависимости от дорожных условий, в которых движется транспортное средство, при этом водитель выполняет операции ускорения, замедления и поворота в зависимости от дорожных условий, и ускорение изменяется в соответствии с операциями водителя. Система управления транспортного средства согласно варианту осуществления выполнена с возможностью использовать управляющий SPI для управления характеристиками движения транспортного средства. В варианте осуществления характеристики движения включают в себя характеристику ускорения, характеристику поворачиваемости, характеристику подвески, характеристику звука и т.д., и эти характеристики задаются требуемым образом посредством изменения характеристики управления дроссельного клапана 10, характеристики переключения передач трансмиссии 13, характеристики демпфирования амортизатора 5 системы 4 подвески, характеристики усиления усиливающего механизма 18 и т.д., посредством актуаторов, предоставляемых в соответствующих компонентах или механизмах. Общая тенденция изменения характеристик движения является такой, что по мере того, как увеличивается управляющий SPI, характеристики движения изменяются так, что они обеспечивают возможность транспортному средству предлагать спортивное вождение. Другими словами, управляющий SPI варианта осуществления является параметром, который изменяет рабочие характеристики, характеристики ускорения или характеристики поведения. Рабочие характеристики включают в себя величины управления или эволютивные скорости электродвигателя, двигателя и трансмиссии, и актуаторов, например устройств усиления при рулевом управлении и торможении относительно рабочих величин, например, руля, педали акселератора и педали тормоза. Характеристики ускорения или характеристики поведения включают в себя характеристики управления актуаторов, например активных стабилизаторов и подвесок, вовлеченных в движение, которые управляются на основе определенных значений команд управления.
В качестве одного примера изменения характеристик движения характеристики ускорения или рабочие характеристики изменяются согласно управляющему SPI следующим образом, как показано на фиг. 4. В этом примере требуемая величина максимального ускорения, соответствующая управляющему SPI, заданному вышеописанным способом, получается. Требуемая величина максимального ускорения указывает избыточную движущую силу, и требуемая максимальная величина ускорения, которая равна 100%, указывает условие, которое разрешает достижение максимального ускорения, которое может быть сформировано в транспортном средстве, при этом передаточное число трансмиссии 13 задается равным передаточному числу, при котором частота вращения двигателя максимизируется, или наибольшему передаточному числу (передаточному числу для самой низкой скорости). Требуемая максимальная величина ускорения, которая равна 50%, указывает условие, которое разрешает достижение ускорения, которое составляет половину от максимального ускорения, которое может быть сформировано в транспортном средстве, при этом передаточное число трансмиссии 13 задается равным промежуточному передаточному числу. В примере, показанном на фиг. 4, требуемая максимальная величина ускорения увеличивается по мере того, как управляющий SPI увеличивается. Базовая характеристика, как указано посредством сплошной линии на фиг. 4, получается посредством вычисления взаимосвязи между управляющим SPI и требуемой максимальной величиной ускорения на основе данных, полученных во время фактического движения транспортного средства, и выполнения коррекций по мере необходимости посредством движения фактического транспортного средства или моделирования. Когда характеристическая линия задается на одной стороне базовой характеристической линии, на которой требуемая максимальная величина ускорения превышает требуемую максимальную величину ускорения базовой характеристики, ускорение транспортного средства становится относительно большим, приводя к характеристике спортивного поведения или характеристике ускорения (т.е. характеристикам движения). Наоборот, когда характеристическая линия задается на другой стороне, на которой требуемая максимальная величина ускорения меньше максимальной величины ускорения базовой характеристики, большое ускорение транспортного средства может мгновенно достигаться, приводя к комфортной характеристике поведения или характеристике ускорения (т.е. характеристикам движения). Регулирование (т.е. адаптация или настройка) этих характеристик может выполняться по мере необходимости в соответствии со сбытовыми качествами, требуемыми от транспортного средства. В базовой характеристике требуемая максимальная величина ускорения задается равной нулю в состоянии, в котором управляющий SPI превышает нуль, так что не допускается отражение состояния движения на скорости для короткого расстояния, такого как пробка или въезд в гараж, посредством управления для задания или изменения характеристик движения.
Описывается управление для изменения характеристики ускорения посредством инструктирования отражения вышеуказанной требуемой максимальной величины ускорения посредством характеристики переключения передач трансмиссии 13. В транспортном средстве, на котором бесступенчатая трансмиссия устанавливается в качестве трансмиссии 13, или в гибридном транспортном средстве, в котором частота вращения двигателя может управляться посредством электродвигателя, целевой вывод или мощность вычисляется на основе скорости транспортного средства и запрашиваемой величины движущей силы, и частота вращения двигателя управляется так, чтобы достичь целевого вывода или мощности. Взаимосвязь между скоростью транспортного средства и ускорением для каждой частоты вращения двигателя указывается на фиг. 5, и требуемая максимальная величина ускорения, полученная из управляющего SPI на основе фиг. 4, как описано выше, добавляется на график по фиг. 5. Например, толстые сплошные линии на фиг. 5 указывают требуемые максимальные величины ускорения в 100% и 50%, добавленные таким образом. Соответственно, требуемая частота вращения двигателя представляется посредством линии, которая проходит пересечение линии, указывающей требуемое максимальное ускорение, полученное из управляющего SPI, и линии, указывающей скорость транспортного средства, определяемую в этот момент времени.
В транспортном средстве, включающем в себя трансмиссию 13, как пояснено выше со ссылкой на фиг. 12, базовая карта переключения передач предоставляется для управления передаточным числом, которое должно устанавливаться посредством трансмиссии 13. В карте переключения передач для бесступенчатой трансмиссии передаточное число задается согласно скорости транспортного средства и частоте вращения двигателя. В одном примере управления передаточным числом, которое известно как управление потребностью в крутящем моменте, требуемая движущая сила получается из карты движущей силы на основе хода педали акселератора в качестве запрашиваемой величины движущей силы и скорости транспортного средства, например, и требуемая мощность двигателя получается из требуемой движущей силы и скорости транспортного средства или частоты вращения двигателя. Целевая частота вращения двигателя, при которой требуемая мощность формируется при оптимальной эффективности использования топлива, получается на основе карты частоты вращения двигателя, и передаточное число бесступенчатой трансмиссии управляется так, что оно достигает целевой частоты вращения двигателя. А именно, трансмиссия 13 выступает в качестве механизма управления частотой вращения двигателя для управления частотой вращения двигателя в качестве источника мощности приведения в движение. Поскольку мощность двигателя получается в качестве произведения крутящего момента и частоты вращения двигателя, крутящий момент двигателя, который достигает требуемой мощности, получается на основе целевой частоты вращения двигателя или скорости транспортного средства, соответствующей целевой частоте вращения двигателя, и открытие дросселя, которое предоставляет крутящий момент двигателя, вычисляется.
Средство B31 указания частоты вращения в спортивном режиме, как показано на фиг. 5, является средством для указания требуемой частоты вращения (частоты вращения двигателя), полученной на основе управляющего SPI, как описано выше, и соответствует средству вычисления частоты вращения в спортивном режиме согласно настоящему изобретению. Кроме того, средство B32 указания частоты вращения в нормальном режиме является средством для указания целевой частоты вращения (частоты вращения двигателя), полученной посредством обычного управления частотой вращения двигателя, например управления потребностью в крутящем моменте, и соответствует средству вычисления частоты вращения в нормальном режиме согласно настоящему изобретению. Частота вращения в нормальном режиме и вышеуказанная частота вращения в спортивном режиме сравниваются (координируются) посредством средства B33 координирования частоты вращения, и частота вращения, имеющая большее значение, выбирается, что называется "выбором максимума". Средство B34 указания конечной частоты вращения формирует тем самым выбранную частоту вращения в качестве управляющего сигнала. Соответственно, когда ход педали акселератора является небольшим, и, следовательно, частота вращения в нормальном режиме меньше частоты вращения в спортивном режиме, частота вращения в спортивном режиме поддерживается. Следует отметить, что, когда запрашиваемая величина движущей силы превышает значение, соответствующее требуемому максимальному ускорению, например, когда педаль акселератора нажимается в значительной степени, осуществляется переключение коробки передач на более низкую передачу.
Для бесступенчатой трансмиссии вышеописанное управление является управлением переключением передач, которое направлено на установление передаточного числа для меньшей скорости транспортного средства (передаточного числа, имеющего большее значение). По мере того как передаточное число управляемо увеличивается, максимальная движущая сила или тормозная сила двигателя становится большей, и поведение транспортного средства управляется с высокой чувствительностью, тем самым предоставляя характеристику, которая предлагает спортивное вождение, или характеристику, которая удовлетворяет общему стилю вождения водителя или окружению движения, например состоянию дороги, по которой движется транспортное средство. В транспортном средстве, на котором устанавливается бесступенчатая трансмиссия, вышеописанное управление может быть выполнено, когда, например, спортивный режим выбирается с одним переключателем выбора, установленным на транспортном средстве.
С другой стороны, трансмиссия 13, когда она имеет два или более положений передачи, управляется так, как показано на фиг. 6. При управлении переключением передач трансмиссии, имеющей два или более положений передачи, целевое положение передачи определяется, и сигнал команды управления формируется в актуатор трансмиссии 13 для того, чтобы устанавливать положение передачи. Фиг. 6 показывает взаимосвязь между скоростью транспортного средства и ускорением для каждого положения передачи. Толстые сплошные линии, добавленные на график по фиг. 6, указывают требуемые максимальные ускорения в 100% и 50% в качестве требуемых максимальных величин ускорения, полученных из управляющего SPI. Соответственно, целевое положение передачи представляется посредством линии положения передачи, которое является ближайшим к пересечению линии, указывающей требуемое максимальное ускорение, полученное из управляющего SPI, и линии, указывающей скорость транспортного средства, определяемую в этот момент времени.
Когда управление выполняется посредством системы управления транспортного средства согласно варианту осуществления, целевое положение передачи в спортивном режиме, полученное на фиг. 6, и целевое положение передачи в нормальном режиме на основе карты переключения передач, подготовленной заранее (например, передаточного числа, определенного на основе операции ускорения и скорости транспортного средства), сравниваются (координируются), и положение передачи для меньшей скорости транспортного средства, имеющее большее передаточное число, выбирается, что называется "выбором минимума". Целевое положение передачи в нормальном режиме трансмиссии, имеющей два или более положений передачи, задается на основе карты переключения передач (карты переключения передач), в которой область каждого положения передачи задается посредством запрашиваемой величины движущей силы, например хода педали акселератора и скорости транспортного средства. Соответственно, переключение коробки передач на более низкую передачу осуществляется, когда запрашиваемая величина движущей силы превышает значение, соответствующее требуемому максимальному ускорению, например, когда педаль акселератора нажимается в значительной степени, и переключение коробки передач на более высокую передачу может осуществляться, когда скорость транспортного средства дополнительно увеличивается.
Средство B41 указания положения передачи в спортивном режиме, как показано на фиг. 6, является средством для указания положения передачи, полученного на основе управляющего SPI, и средство B42 указания положения передачи в нормальном режиме является средством для указания положения передачи, полученного на основе обычной карты переключения передач, заданной с использованием хода педали акселератора и скорости транспортного средства. Положение передачи в спортивном режиме и положение передачи в нормальном режиме сравниваются (координируются) посредством средства B43 координирования положения передачи, и положение передачи для меньшей скорости (положение передачи, имеющее большее передаточное число) выбирается, а именно "выбор минимума" выполняется. Средство B44 указания конечного положения передачи формирует тем самым выбранное положение передачи в качестве управляющего сигнала. А именно, трансмиссия 13 выступает в качестве механизма управления частотой вращения двигателя для управления частотой вращения двигателя в качестве источника мощности приведения в движение. Соответственно, когда ход педали акселератора является небольшим, и, следовательно, положение передачи в нормальном режиме является положением передачи для большей скорости, чем положение передачи в спортивном режиме, положение передачи в спортивном режиме поддерживается, и положение передачи для меньшей скорости транспортного средства (имеющей большее передаточное число) устанавливается.
Для трансмиссии, имеющей два или более положений передачи, описанное управление является управлением переключением передач, которое направлено на установление положения передачи для меньшей скорости транспортного средства (передаточного числа, имеющего большее значение). По мере того как передаточное число управляемо увеличивается, максимальная движущая сила или тормозная сила двигателя становится большей, и поведение транспортного средства управляется с высокой чувствительностью, тем самым предоставляя характеристику, которая предлагает спортивное вождение, или характеристику, которая удовлетворяет общему стилю вождения водителя или окружению движения, например состоянию дороги, по которой движется транспортное средство. Вышеуказанное управление может быть выполнено, когда, например, спортивный режим выбирается с переключателем выбора режима, установленным на транспортном средстве, и управление может запрещаться, когда, например, спортивный режим не выбирается.
Электронный модуль 28 управления может иметь функции соответствующего средства, показанного на фиг. 5, или функции соответствующего средства, показанного на фиг. 6. Альтернативно, может обеспечиваться электронный модуль управления для спортивного режима, и электронный модуль управления в спортивном режиме может иметь вышеуказанные функции.
А именно, когда увеличивается частота вращения двигателя или изменяется положение передачи на положение передачи для меньшей скорости согласно увеличению запрашиваемой величины движущей силы, частота вращения двигателя или положение передачи для меньшей скорости могут задаваться следующим образом. Движущая сила транспортного средства или требуемое ускорение на основе движущей силы определяется на основе запрашиваемой величины движущей силы, например хода педали акселератора и скорости транспортного средства. Следовательно, когда требуемое ускорение, полученное на основе запрашиваемой величины движущей силы, превышает ускорение, полученное из требуемой максимальной величины ускорения, полученной на основе управляющего SPI и скорости транспортного средства, частота вращения двигателя или положение передачи могут задаваться так, что они формируют требуемое ускорение, полученное на основе запрашиваемой величины движущей силы, например хода педали акселератора. Альтернативно, поскольку максимальное ускорение, которое может быть сформировано в момент, когда запрашиваемая величина движущей силы увеличивается, определяется посредством скорости транспортного средства и передаточного числа, частота вращения двигателя или положение передачи могут задаваться так, что они формируют ускорение, полученное посредством деления отклонения между максимальным ускорением, которое может быть сформировано, и ускорением, полученным из фиг. 5 или 6 на основе управляющего SPI, пропорционально посредством отношения запрашиваемой величины движущей силы, например хода педали акселератора, к ее максимальному значению. А именно, промежуточные точки между максимальным ускорением, которое может быть сформировано, и ускорением, полученным, например, из фиг. 5 или 6 на основе управляющего SPI, могут быть интерполированы в соответствии с запрашиваемой величиной движущей силы.
Когда ускорение на основе управляющего SPI переключается на ускорение на основе запрашиваемой величины движущей силы, реакция на управляющее воздействие переключения может быть задана более быстрой, поскольку управляющий SPI уже является большим. Если управляющий SPI уже является большим, считается, что водителю требуется более спортивное движение или более резкое движение; поскольку запрашиваемая величина движущей силы дополнительно увеличивается при этом условии, рабочие характеристики ускорения транспортного средства могут улучшаться посредством быстрого достижения целевой частоты вращения двигателя, выбранной посредством "выбора максимума", или положения передачи, выбранного посредством "выбора минимума". Если, с другой стороны, управляющий SPI является относительно небольшим, считается, что водителю требуется более умеренное или менее спортивное движение; следовательно, целевая частота вращения двигателя, выбранная посредством "выбора максимума", или положение передачи, выбранное посредством "выбора минимума", может медленно достигаться. Таким образом, ускорение изменяется плавно, и отклонение от требуемой характеристики ускорения или рабочих характеристик является небольшим; следовательно, не допускается ощущение некомфортности водителя в отношении ускорения.
Далее описано управление для коррекции положения передачи и движущей силы и результирующие изменения в характеристиках движения, когда система управления транспортного средства изобретения применяется к транспортному средству, на котором двигатель внутреннего сгорания устанавливается в качестве источника мощности приведения в движение, и трансмиссия, имеющая два или более положений передачи, устанавливается. Фиг. 7 показывает пример, при котором целевое положение передачи и целевой крутящий момент двигателя получаются из требуемой движущей силы. Первоначально требуемая движущая сила вычисляется из скорости транспортного средства и хода педали акселератора (этап B1). Поскольку требуемая движущая сила определяется посредством, например, веса кузова транспортного средства и рабочих характеристик мощности, предоставленных транспортному средству, карта, которая задает требуемую движущую силу относительно скорости транспортного средства и хода педали акселератора, подготавливается заранее, и вычисление на этапе B1 выполняется посредством определения требуемой движущей силы на основе карты. С одной стороны, положение передачи (или скорость трансмиссии) вычисляется на основе требуемой движущей силы (этап B2). Управление переключением передач трансмиссии, имеющей два или более положений передачи, выполняется на основе карты переключения передач, в которой области соответствующих положений передачи или линий переключения коробки передач на более высокую передачу и линий переключения коробки передач на более низкую передачу задаются с использованием скорости транспортного средства и требуемой движущей силы в качестве параметров. Таким образом, положение передачи вычисляется на этапе B2 на основе карты переключения передач, подготовленной заранее. Требуемое положение передачи, полученное таким образом, формируется в качестве сигнала команды управления в устройство B3 управления переключением передач (ECT), в котором выполняется управление переключением передач трансмиссии 13. Если блокировочная муфта (LU) предоставляется в тракте передачи энергии транспортного средства 1, зацепление/расцепление блокировочной муфты определяется на основе карты, подготовленной заранее, и сигнал команды управления для управления зацеплением/расцеплением блокировочной муфты также формируется.
С другой стороны, требуемый крутящий момент двигателя вычисляется на основе требуемой движущей силы, полученной на этапе B1, и фактического положения передачи трансмиссии 13 (этап B4). Поскольку частота вращения двигателя определяется на основе положения передачи и скорости транспортного средства, требуемый крутящий момент двигателя может быть вычислен на основе частоты вращения двигателя и требуемой движущей силы. Затем, двигатель 8 управляется так, чтобы формировать полученный таким образом крутящий момент двигателя (этап B5). Более конкретно, управляется открытие дросселя.
В системе управления транспортного средства согласно изобретению, управляющий SPI изменяется на основе мгновенного SPI, например, продольного ускорения Gx, поперечного ускорения Gy или составного ускорения, в котором эти ускорения Gx, Gy комбинируются, и требуемое максимальное ускорение изменяется в соответствии с изменением управляющего SPI. Требуемое максимальное ускорение отражается посредством управления переключением передач, как пояснено выше со ссылкой на фиг 6. Если положение передачи, определенное на основе управляющего SPI в спортивном режиме, является положением передачи для меньшей скорости транспортного средства, чем положение передачи в (обычном) нормальном режиме, положение передачи для меньшей скорости транспортного средства задается как окончательно указанное положение передачи. Базовая компоновка, поясненная выше со ссылкой на фиг. 7, выполнена с возможностью осуществлять управление переключением передач в нормальном режиме; следовательно, если окончательно указанное положение передачи на основе управляющего SPI является положением передачи для меньшей скорости транспортного средства, это положение передачи принимается посредством этапа B2 и задается как требуемое положение передачи. Как результат, получается относительно большое передаточное число. Следовательно, максимальная движущая сила или тормозная сила двигателя становится большой, и поведение транспортного средства управляется с высокой чувствительностью, тем самым предоставляя характеристику, которая предлагает спортивную гонку, или характеристику, которая удовлетворяет предпочтению при вождении водителя или окружению движения, например состоянию дороги, по которой движется транспортное средство.
Чтобы обеспечить характеристику ускорения, соответствующую управляющему SPI, мощность, сформированная посредством двигателя 8, может увеличиваться или уменьшаться. Для управления мощностью этап B1, как описано выше, принимает корректирующую движущую силу и увеличивает или уменьшает требуемую движущую силу, полученную посредством вышеописанной базовой компоновки, с использованием корректирующей движущей силы. Система управления может быть выполнена с возможностью получать корректирующую движущую силу на основе управляющего SPI, как описано выше. Например, взаимосвязь между управляющим SPI и корректирующей движущей силой может быть определена посредством, например, эксперимента или моделирования, осуществляемого согласно намерению водителя, и взаимосвязь может подготавливаться заранее, например, в качестве данных в форме карты. Затем, корректирующая движущая сила может получаться из данных, таких как управляющий SPI, полученный во время движения, и карта корректирующих движущих сил.
Фиг. 8 показывает пример, в котором положение передачи и требуемая движущая сила получаются параллельно друг с другом из скорости транспортного средства и хода педали акселератора. Как описано выше, передаточное число трансмиссии, имеющей два или более положений передачи, управляется на основе карты переключения передач, в которой положения передачи или линии переключения коробки передач на более высокую передачу и линии переключения коробки передач на более низкую передачу задаются на основе скорости транспортного средства и хода педали акселератора; следовательно, с одной стороны, положение передачи вычисляется (на этапе B12) из скорости транспортного средства и хода педали акселератора, и, с другой стороны, требуемая движущая сила вычисляется (на этапе B11) из скорости транспортного средства и хода педали акселератора. Вычисление требуемой движущей силы является аналогичным вычислению на этапе B1, показанном на фиг 7, как описано выше.
Требуемое положение передачи, полученное на этапе B12, передается в устройство B13 управления переключением передач (ECT), в котором управление переключением передач выполняется для трансмиссии 13. Если блокировочная муфта (LU) предоставляется в тракте передачи энергии транспортного средства 1, зацепление/расцепление блокировочной муфты определяется на основе карты, которая подготавливается заранее, и сигнал команды управления для управления зацеплением/расцеплением блокировочной муфты также формируется.
С другой стороны, требуемый крутящий момент двигателя вычисляется (на этапе B14) на основе требуемой движущей силы, полученной на вышеуказанном этапе B11, и фактического положения передачи трансмиссии 13, и двигатель 8 управляется так, чтобы формировать полученный таким образом крутящий момент двигателя (этап B15). Управление на этапе B14 является аналогичным управлению на этапе B4, показанному на фиг 7, как описано выше, и управление на этапе B15 является аналогичным управлению на этапе B5, показанному на фиг 7, как описано выше.
В компоновке, как показано на фиг 8, также, если окончательно указанное положение передачи на основе управляющего SPI является положением передачи для меньшей скорости транспортного средства, это положение передачи принимается посредством этапа B12 и задается как требуемое положение передачи. Как результат, относительно большое передаточное число задается, приводя к увеличению эффективности ускорения в качестве характеристики движения транспортного средства. Кроме того, этап B11 принимает корректирующую движущую силу, соответствующую управляющему SPI, и увеличивает или уменьшает требуемую движущую силу, определенную посредством базовой компоновки, как описано выше, с использованием корректирующей движущей силы.
Фиг. 9 показывает пример, в котором трансмиссия 13 и двигатель 8 управляются независимо друг от друга на основе скорости транспортного средства и хода педали акселератора. А именно, положение передачи вычисляется (на этапе B22) на основе скорости транспортного средства и хода педали акселератора, и требуемое положение передачи, полученное посредством вычисления, передается в устройство B23 управления переключением передач (ECT), в котором управление переключением передач выполняется для трансмиссии 13. Эти режимы управления являются аналогичными режимам этапа B12 и этапа B13, как показано на фиг. 8. Кроме того, открытие дросселя вычисляется (на этапе B24) на основе хода педали акселератора, и двигатель 8 управляется (на этапе B25) согласно требуемому открытию дросселя. Если двигатель 8 имеет электронный дроссельный клапан, взаимосвязь между ходом педали акселератора и открытием дросселя, в общем, является нелинейной взаимосвязью. Таким образом, в состоянии, в котором ход педали акселератора является относительно небольшим, величина изменения открытия дросселя является небольшой относительно величины изменения хода педали акселератора. Когда ход педали акселератора является относительно большим, взаимосвязь между величиной изменения хода педали акселератора и величиной изменения открытия дросселя является близкой к взаимосвязи "один к одному".
При базовой компоновке, как показано на фиг. 9, если окончательно указанное положение передачи на основе управляющего SPI является положением передачи для меньшей скорости транспортного средства, это положение передачи принимается посредством этапа B22 и задается как требуемое положение передачи. Как результат, относительно большое передаточное число задается, и рабочие характеристики ускорения в качестве характеристики движения транспортного средства улучшаются. Кроме того, этап B24 принимает корректирующее открытие дросселя, соответствующее управляющему SPI, и увеличивает или уменьшает требуемое открытие дросселя, полученное посредством вышеописанной базовой компоновки, с использованием корректирующего открытия дросселя. А именно, когда управляющий SPI становится большим, выходная характеристика источника приведения в движение относительно операции ускорения может быть изменена (например, выходная характеристика может увеличиваться).
В системе управления транспортного средства согласно изобретению, как описано выше, когда составное ускорение увеличивается на основе намерения ускорения, замедления или поворачивания транспортного средства водителя, например, когда педаль акселератора 12 нажимается, чтобы ускорять транспортное средство, или когда педаль 7 тормоза нажимается, чтобы замедлять транспортное средство, или когда руль 16 вращается, чтобы поворачивать транспортное средство, управляющий SPI сразу увеличивается в ответ на увеличение составного ускорения. Как результат, избыточная движущая сил увеличивается в соответствии с увеличением управляющего SPI, и требуемое ускорение формируется мгновенно, тем самым предоставляя возможность транспортному средству предлагать спортивное вождение в качестве характеристики движения. Поскольку описанные операции водителем, в общем, выполняются для того, чтобы водить транспортное средство согласно окружению движения, например градиенту дороги, по которой движется транспортное средство, вышеописанное изменение в характеристике движения отражает предпочтения водителя и окружение движения.
Например, когда транспортное средство начинает движение на подъеме, транспортное средство перемещается в направлении, противоположном направлению, в котором ускорение свободного падения применяется к транспортному средству; следовательно, датчик ускорения формирует выходное значение, превышающее значение, соответствующее фактическому ускорению. Следовательно, когда транспортное средство ускоряется на подъеме, мгновенный SPI становится превышающим мгновенный SPI, когда транспортное средство ускоряется на плоской дороге, не имеющей градиент или наклон. Поскольку управляющий SPI увеличивается по мере того, как мгновенный SPI увеличивается, характеристика ускорения изменяется в направлении, в котором сила ускорения увеличивается. На подъеме, поэтому, может получаться относительно большая движущая сила. Наоборот, на спуске датчик ускорения формирует выходное значение, меньшее, чем значение, соответствующее фактическому ускорению. Следовательно, когда транспортное средство замедляется на спуске, мгновенный SPI становится относительно небольшим. Тем не менее, если операция торможения выполняется так, что она подавляет или предотвращает увеличение скорости транспортного средства на спуске, ускорение свободного падения добавляется к ускорению, являющемуся результатом операции торможения, и выходное значение датчика ускорения становится относительно большим. Как результат, мгновенный SPI увеличивается, и может получаться относительно большая тормозная сила двигателя. Соответственно, становится необязательным или менее необходимым выполнять специальные операции ускорения/замедления для движения на подъеме и движения на спуске, тем самым гарантируя дополнительно улучшенную общую характеристику управляемости. Кроме того, общеизвестное управление подъемами/спусками, например запрещение или ограничение установления передаточного числа для высокой скорости транспортного средства, может быть уменьшено или сделано необязательным.
Кроме того, в вышеописанной системе управления транспортного средства изобретения, когда характеристика движения транспортного средства изменяется на основе ускорений в двух или более направлениях, степень изменения характеристики движения на основе ускорения в определенном направлении (другими словами, как ускорение отражается за счет характеристики движения) задается отличающейся от степени изменения характеристики движения на основе ускорения в другом направлении с учетом случая, когда степень возникновения ускорения или абсолютная величина ускорения либо чувство или ощущение вождения водителем, либо влияние ускорения на поведение отличается в зависимости от направления ускорения. Таким образом, характеристика движения может быть более надлежащим образом изменена на основе ускорений в двух или более направлениях.
В описанном варианте осуществления возникает ускорение в любом из продольного и поперечного направлений, как только транспортное средство начинает движение, и управляющий SPI увеличивается согласно ускорению. С другой стороны, уменьшение управляющего SPI относительно задерживается. Следовательно, управляющий SPI и требуемая максимальная величина ускорения увеличиваются с истекшим временем или пройденным расстоянием после начала движения. Когда управляющий SPI увеличивается согласно истекшему времени или пройденному расстоянию после начала движения, система варианта осуществления может быть выполнена с возможностью дополнительно увеличивать управляющий SPI, если мгновенный SPI продолжает иметь относительно большие значения. Когда мгновенный SPI временно увеличивается, управляющий SPI задается согласно мгновенному SPI. С другой стороны, когда мгновенный SPI продолжает иметь большие значения, или когда мгновенный SPI допускает большие значения с высокой частотой, значение управляющего SPI постепенно увеличивается, даже если значение мгновенного SPI не превышает значение управляющего SPI. Например, когда отклонение между мгновенным SPI и управляющим SPI становится небольшим, управляющий SPI может увеличиваться, даже если значение мгновенного SPI не превышает значение управляющего SPI.
Следует отметить, что факторы, которые влияют на характеристики движения транспортного средства или определяют характеристики движения, не ограничены управлением передаточным числом, но также включают в себя выходную характеристику крутящего момента двигателя относительно операции ускорения, характеристику рулевого управления в качестве взаимосвязи между углом поворота колес или силой поворота колес и углом поворота передних колес, характеристику демпфирования вибрации системы 4 подвески и характеристику поворачиваемости на основе коэффициента распределения крутящего момента на передние колеса и задние колеса полноприводного транспортного средства. Система управления транспортного средства по изобретению выполнена с возможностью изменять эти характеристики на основе индекса, полученного из ускорения. Например, в соответствии с вышеописанным управляющим SPI, выходная реакция двигателя 8 задается надлежащей, а именно скорость увеличения открытия дросселя задается надлежащей, усиливающий крутящий момент, предоставляемый посредством усиливающего механизма 18, задается надлежащим, тем самым заставляя водителя надлежащим образом непосредственно ощущать рулевое управление, передаточное отношение механизма 15 рулевого управления задается надлежащим, и поворачиваемость задается надлежащей посредством задания надлежащей величины крутящего момента, распределенной на задние колеса. Управление для изменения каждой характеристики может быть реализовано посредством изменения выходных характеристик актуаторов, предоставляемых в соответствующих механизмах.
Система управления транспортного средства по изобретению может быть использована в случае, если характеристика рулевого управления или характеристика подвески в качестве одной из характеристик движения транспортного средства изменяется, а также в случае, если характеристика ускорения или характеристика мощности транспортного средства изменяется. Фиг. 10 является блок-схемой, применимой для пояснения управления для изменения характеристики рулевого управления на основе вышеописанного управляющего SPI. Фиг. 10 схематично показывает механизм электроусилителя руля (EPS) с использованием рулевой передачи с переменным передаточным отношением (VGRS-передачи). Рейка 30, которая перемещается вперед-назад в направлении ширины (поперечном направлении) транспортного средства в ответ на силу поворота колес, предоставляется, и шестерня зубчатой VGRS-передачи 31 находится в зацеплении с рейкой 30. VGRS-актуатор 32 для изменения передаточного отношения монтируется на зубчатой VGRS-передаче 31. Кроме того, электродвигатель 33 с зубчатой передачей EPS предоставляется для помощи в перемещении рейки 30 в направлении, в котором применяется сила поворота колес. EPS-механизм дополнительно включает в себя модуль 34 вычисления передаточного отношения, который формирует сигнал команды управления в VGRS-актуатор 32 для того, чтобы изменять передаточное отношение, и модуль 35 вычисления усиливающего крутящего момента, вычисляющий крутящий момент (осевое давление, применяемое к рейке 30), который должен формироваться посредством электродвигателя с зубчатой передачей EPS, и формирует сигнал команды управления, обеспечивающий крутящий момент. В качестве механизма электроусилителя руля и соответствующих модулей вычисления могут быть использованы модули, которые имеют общеизвестные компоновки или конфигурации.
Каждый из модулей 34, 35 вычисления принимает значения определения скорости транспортного средства, угла поворота колес и крутящего момента поворота колес в качестве данных. Эти элементы данных могут получаться посредством предоставляемых датчиков, соответственно. Помимо этого, модуль 34 вычисления передаточного отношения принимает данные, указывающие корректирующее передаточное отношение. Корректирующее передаточное отношение является передаточным отношением, используемым для коррекции сигнала команды управления в VGRS-актуатор 32, и задается равным значению, соответствующему управляющему SPI. Более конкретно, карта, которая задает взаимосвязь между корректирующим передаточным отношением и управляющим SPI, может подготавливаться заранее, и корректирующее передаточное отношение может быть определено согласно карте. Взаимосвязь между управляющим SPI и корректирующим передаточным отношением может быть надлежащим образом определена по мере необходимости.
С другой стороны, модуль 35 вычисления усиливающего крутящего момента принимает корректирующий усиливающий крутящий момент в качестве данных, в дополнение к скорости транспортного средства, углу поворота колес и крутящему моменту поворота колес, как описано выше. Корректирующий усиливающий крутящий момент является крутящим моментом для коррекции сигнала команды управления в электродвигатель 33 с зубчатой передачей EPS и задается равным значению, соответствующему управляющему SPI. Более конкретно, карта, которая задает взаимосвязь между управляющим SPI и корректирующим усиливающим крутящим моментом, может подготавливаться заранее, и усиливающий крутящий момент может быть определен согласно карте. Взаимосвязь между управляющим SPI и корректирующим усиливающим крутящим моментом может быть надлежащим образом определена по мере необходимости.
Соответственно, при компоновке, как показано на фиг. 10, передаточное отношение VGRS-модуля 31 изменяется, или усиливающий крутящий момент, добавленный к силе поворота колес, изменяется согласно абсолютной величине управляющего SPI, полученного на основе ускорения, применяемого к транспортному средству.
Фиг. 11 является блок-схемой, применимой для пояснения управления для изменения характеристик подвески на основе управляющего SPI. Фиг. 11 показывает пример, при котором система управления транспортного средства может управлять высотой транспортного средства, коэффициентом демпфирования вибрации и жесткостью пружины, ассоциированной с механизмом подвески (не показан). Модуль 40 вычисления предоставляется для вычисления требуемых значений высоты транспортного средства, коэффициента демпфирования вибрации и жесткости пружины. Модуль 40 вычисления состоит преимущественно из микрокомпьютера, в качестве одного примера, и выполняет вычисления с использованием входных данных и заранее сохраненных данных, так что он получает требуемую высоту транспортного средства, требуемый коэффициент демпфирования и требуемую жесткость пружины. Примеры данных включают в себя скорость транспортного средства, сигнал определения датчика управления высотой переднего правого (FR) колеса, сигнал определения датчика управления высотой переднего левого (FL) колеса, сигнал определения датчика управления высотой заднего правого (RR) колеса, сигнал определения датчика управления высотой заднего левого (RL) колеса, сигнал определения датчика вертикального G (ускорения) переднего правого (FR) колеса, сигнал определения датчика вертикального G (ускорения) переднего левого (FL) колеса, сигнал определения датчика вертикального G (ускорения) заднего правого (RR) колеса и сигнал определения датчика вертикального G (ускорения) заднего левого (RL) колеса в качестве данных. Эти устройства являются аналогичными устройствам, известным в данной области техники.
В примере, как показано на фиг 11, модуль 40 вычисления принимает корректирующую высоту транспортного средства, корректирующий коэффициент демпфирования и корректирующую жесткость пружины в качестве данных для управления характеристиками подвески. Корректирующая высота транспортного средства является данным для коррекции высоты транспортного средства согласно управляющему SPI. Например, карта, которая задает взаимосвязь между корректирующей высотой транспортного средства и управляющим SPI, может подготавливаться заранее, и корректирующая высота транспортного средства может быть определена согласно карте. Кроме того, корректирующий коэффициент демпфирования является данным для коррекции коэффициента демпфирования устройства, например амортизатора, который выполняет функцию демпфирования вибрации. Например, карта, которая задает взаимосвязь между корректирующим коэффициентом демпфирования и управляющим SPI, подготавливается заранее, и корректирующий коэффициент демпфирования определяется согласно карте. По мере того как управляющий SPI увеличивается, корректирующий коэффициент демпфирования имеет большее значение, так что система подвески задается равной характеристикам, которые обеспечивают жесткую или тряскую езду. Аналогично, корректирующая жесткость пружины является данным для коррекции жесткости пружины системы подвески. Например, карта, которая задает взаимосвязь между корректирующей жесткостью пружины и управляющим SPI, может подготавливаться заранее, и корректирующая жесткость пружины может быть определена согласно карте. По мере того как управляющий SPI увеличивается, корректирующая жесткость пружины задается равной большему значению, и система подвески задается равной характеристикам, которые обеспечивают жесткую или тряскую езду.
Модуль 40 вычисления может осуществлять вычисления с использованием данных, как описано выше, и формировать требуемую высоту транспортного средства, тем самым вычисленную, в качестве сигнала команды управления в модуль управления высотой транспортного средства 41, чтобы управлять высотой транспортного средства согласно управляющему SPI. Более конкретно, когда управляющий SPI является относительно большим, высота транспортного средства управляется так, что она является относительно небольшой. Кроме того, модуль 40 вычисления может формировать требуемый коэффициент демпфирования, полученный в качестве результата вычисления, в качестве сигнала команды управления в модуль управления коэффициента демпфирования 42 и управлять коэффициентом демпфирования согласно управляющему SPI. Более конкретно, когда управляющий SPI является относительно большим, коэффициент демпфирования управляется так, что он является относительно большим. Кроме того, модуль 40 вычисления может формировать требуемую жесткость пружины, полученную в качестве результата вычисления, в качестве сигнала команды управления в модуль управления жесткостью пружины 43 и управлять жесткостью пружины согласно управляющему SPI. Более конкретно, когда управляющий SPI является относительно большим, жесткость пружины управляется так, что она является относительно большой.
Как описано выше, система управления транспортного средства согласно настоящему изобретению может изменять характеристики подвески в качестве одного примера характеристик движения согласно управляющему индексу, например управляющему SPI, полученному на основе ускорения, и задавать характеристики подвески, подходящие для намерения водителя, окружения движения и состояний движения транспортного средства. Как результат, в случае плавного движения с относительно небольшим продольным и/или поперечным ускорением (ускорениями), характеристики подвески обеспечивают ощущение мягкости или нежесткую езду, тем самым повышая комфорт во время езды. Когда требуется резкое движение транспортного средства, при котором продольное и/или поперечное ускорение (i) является большим, характеристики подвески обеспечивают ощущение резкости или жесткой езды, и проседание или подскакивание кузова транспортного средства в продольном и поперечном направлениях либо крен или "галопирование" подавляются, тем самым гарантируя улучшенную общую характеристику управляемости. Следует отметить, что ускорения могут быть абсолютными значениями для значений определения, определяемых посредством датчиков ускорения, могут быть вычислены на основе информации по рабочей системе и/или перемещению транспортного средства или могут быть комбинацией абсолютного значения для значения определения и значения, вычисленного на основе информации.
Далее, фиг. 13 является блок-схемой последовательности операций способа, применимой для пояснения одного примера другого управления, выполненного посредством системы управления транспортного средства изобретения. Первоначально определяется, поворачивает или нет транспортное средство (этап S1). Это определение может выполняться посредством определения того, равен или превышает угол поворота колес или угол поворота предварительно определенное пороговое значение либо нет, или того, равна или превышает фактическая скорость рыскания, применяемая к транспортному средству, предварительно определенное значение либо нет, или того, равен или превышает угол, сформированный посредством вектора, представляющего составное ускорение или мгновенный SPI и продольное направление транспортного средства, предварительно определенный угол либо нет. Пороговое значение или угол, на основе которого выполняется определение, может быть определен заранее посредством эксперимента или моделирования, осуществляемого согласно намерению водителя.
Когда транспортное средство движется по прямому пути и тем самым отрицательное решение принимается на этапе S1, координация между спортивным режимом (спортивным вождением) и нормальным режимом (нормальным вождением) выполняется (этап S2), и управление возвращается. "Координация" является управлением, при котором более высокая частота вращения, которая выбирается через "выбор максимума" посредством средства B33 координирования частоты вращения, как показано на фиг. 5, формируется для средства B34 указания конечной частоты вращения. Альтернативно, "координация" является управлением, при котором положение передачи для меньшей скорости транспортного средства, которое выбирается через "выбор минимума" посредством средства B43 координирования положения передачи, как показано на фиг 6, формируется для средства B44 указания конечного положения передачи. Таким образом, избыточный крутящий момент приведения в движение транспортного средства в целом увеличивается в соответствии с требуемым максимальным ускорением, тем самым предоставляя возможность транспортному средству двигаться согласно намерению водителя.
С другой стороны, если транспортное средство поворачивает и положительное решение принимается на этапе S1, управление частотой вращения двигателя или положением передачи согласно управляющему SPI поддерживается (этап S3) и управление возвращается. Дополнительно, даже если частота вращения двигателя или положение передачи, определенное на основе запрашиваемой величины движущей силы, например хода педали акселератора, превышает частоту вращения двигателя или положение передачи, определенное на основе управляющего SPI, частота вращения двигателя или положение передачи, определенное на основе управляющего SPI, могут поддерживаться.
Система управления транспортного средства согласно изобретению может быть выполнена с возможностью определения индекса, например, управляющего SPI на основе состояния движения транспортного средства, например составного ускорения (мгновенного SPI), замены индекса промежуточным индексом, например требуемой максимальной величиной ускорения, и задания частоты вращения двигателя или передаточного числа, при котором избыточное ускорение получается на основе промежуточного индекса. В этом случае намерение водителя, представленное посредством индекса, такого как мгновенный SPI или управляющий SPI, необязательно отражается посредством состояний движения или характеристики ускорения все время, а способ, которым спортивность отражается посредством состояний движения или характеристики ускорения, может отличаться в зависимости от случая, когда транспортное средство движется, либо состояний движения или запрашиваемой величины движущей силы на основе операции водителя. Например, можно считать, что в состоянии, в котором транспортное средство движется на относительно низкой скорости, или степень ускорения или замедления является относительно небольшой, частота вращения двигателя не должна повышаться так, что она превышает запрашиваемую величину движущей силы, представленную посредством, например, хода педали акселератора, или передаточное число не должно задаваться равным передаточному числу для меньшей скорости транспортного средства, а характеристика ускорения или рабочие характеристики могут быть определены в соответствии с запрашиваемой величиной движущей силы на основе операции водителя, даже если мгновенный SPI определяется, и управляющий SPI определяется согласно мгновенному SPI.
Теперь будет описан один пример управления, описанного выше. В описанном варианте осуществления, в котором управляющий SPI заменяется или преобразуется в требуемую максимальную величину ускорения, карта, как показано на фиг. 14, может быть использована вместо карты, как показано на фиг. 4, для преобразования управляющего SPI в требуемую максимальную величину ускорения. В карте, как показано на фиг. 14, когда управляющий SPI увеличивается со значения, меньшего первого предварительно определенного значения Y, требуемая максимальная величина ускорения сохраняется равной "0" до тех пор, пока управляющий SPI не становится равным второму предварительно определенному значению X, которое превышает первое предварительно определенное значение Y. Затем, требуемая максимальная величина ускорения, соответствующая управляющему SPI, определяется в момент, когда управляющий SPI достигает второго предварительно определенного значения X. Требуемая максимальная величина ускорения, соответствующая второму предварительно определенному значению X, равна значению, полученному согласно карте, показанной на фиг. 4, как описано выше. Кроме того, когда управляющий SPI уменьшается от значения, превышающего второе предварительно определенное значение X, требуемая максимальная величина ускорения, соответствующая каждому управляющему SPI, получается до тех пор, пока управляющий SPI не уменьшается за пределы второго предварительно определенного значения X вплоть до первого предварительно определенного значения Y, меньшего второго предварительно определенного значения X. А именно, определенный гистерезис задается между управляющим SPI, при котором требуемая максимальная величина ускорения повышается от "0", и управляющим SPI, при котором требуемая максимальная величина ускорения падает до "0".
Согласно управлению с использованием карты, как показано на фиг. 14, в состоянии, в котором управляющий SPI является небольшим, поскольку продольное ускорение и/или поперечное ускорение является небольшим, требуемая максимальная величина ускорения сохраняется равной "0", а именно управление для улучшения эффективности ускорения не выполняется, т.е. управление для улучшения эффективности ускорения запрещается, и частота вращения двигателя или положение передачи задается на основе запрашиваемой величины движущей силы, например хода педали акселератора, управляемой водителем. Условие, при котором управляющий SPI является небольшим, осуществляется, например, когда транспортное средство движется в городе или по центру города. Даже если продольное ускорение или поперечное ускорение увеличивается временно по какой-либо причине во время движения, и управляющий SPI увеличивается, соответственно, требуемая максимальная величина ускорения не увеличивается до тех пор, пока управляющий SPI не достигнет второго предварительно определенного значения X, тем самым разрешая движение, подходящее для окружения движения, например, в городе.
С другой стороны, после того, как управляющий SPI становится равным или превышающим второе предварительно определенное значение X, и требуемая максимальная величина ускорения задается в соответствии с управляющим SPI, даже если управляющий SPI становится меньше второго предварительно определенного значения X, требуемая максимальная величина ускорения продолжает задаваться согласно управляющему SPI до тех пор, пока управляющий SPI не снижается до первого предварительно определенного значения Y, и тем самым управление в соответствии с намерением водителя продолжается. При указанной компоновке, в которой обеспечивается гистерезис, может предотвращаться периодическое колебание управления.
Хотя фиг. 2, как описано выше, иллюстрирует пример, в котором управляющий SPI увеличивается пошагово (или в шагах), система изобретения может быть выполнена с возможностью линейно (непрерывно) увеличивать индекс, поясненный в качестве управляющего SPI.
Кроме того, система согласно настоящему изобретению состоит преимущественно из электронного модуля управления, и изобретение реализуется посредством электронного модуля управления.
Управление с использованием системы управления транспортного средства изобретения, как описано выше, может быть реализовано в комбинации с предшествующим уровнем техники. Например, управление изобретением может быть выполнено посредством применения предшествующего уровня техники, например нейрокомпьютера или нейронной сети, в системе, как описано в JP 06-249007 А, к технологии управления изобретения.
Изобретение описано в отношении примерных вариантов осуществления только в качестве иллюстрации. Следует понимать, что описание не является исчерпывающим и не ограничивает изобретение, так что изобретение может быть использовано в других системах и вариантах применения. Объем изобретения охватывает различные модификации и эквивалентные компоновки, которые могут быть задуманы специалистами в данной области техники.
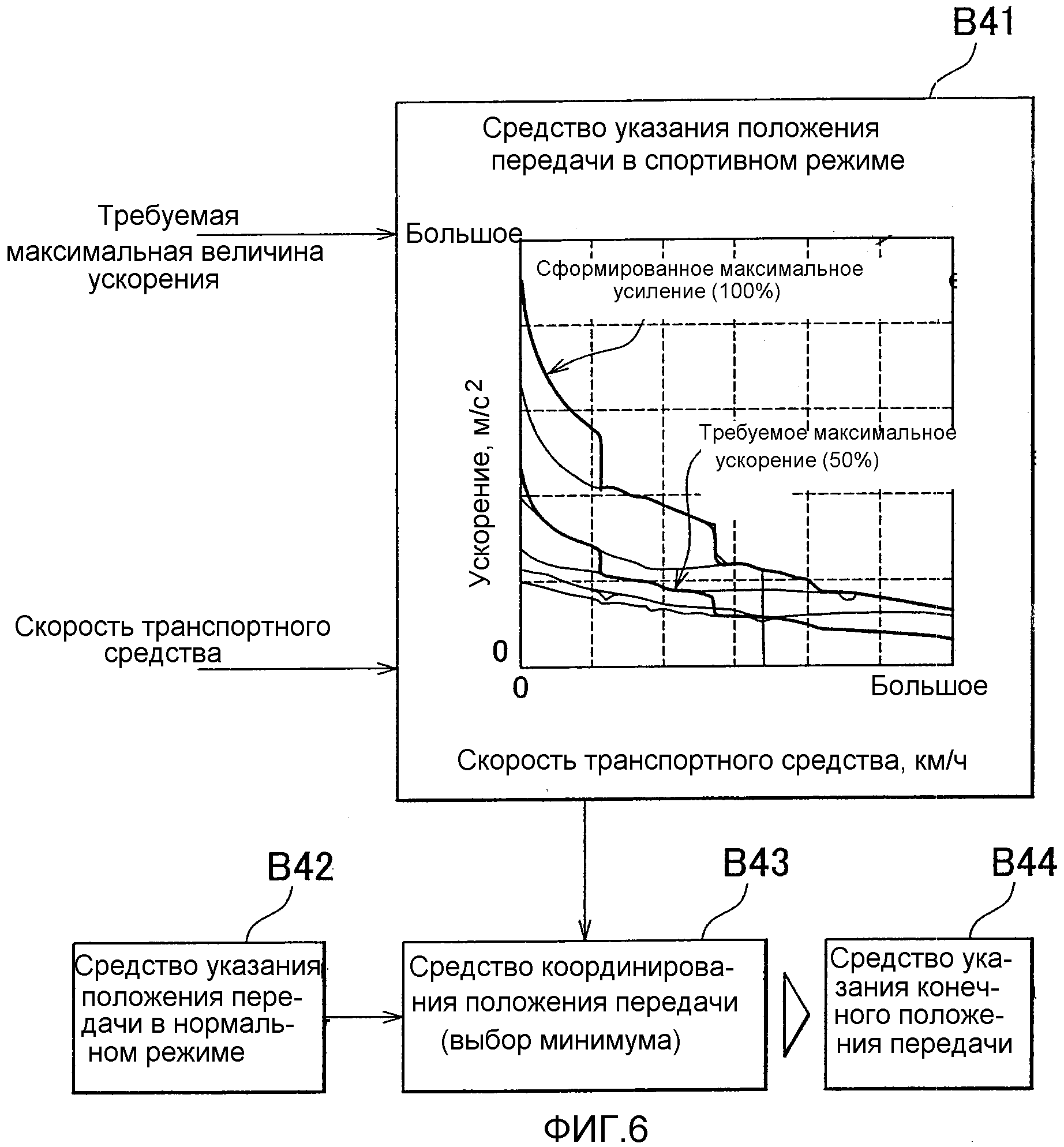
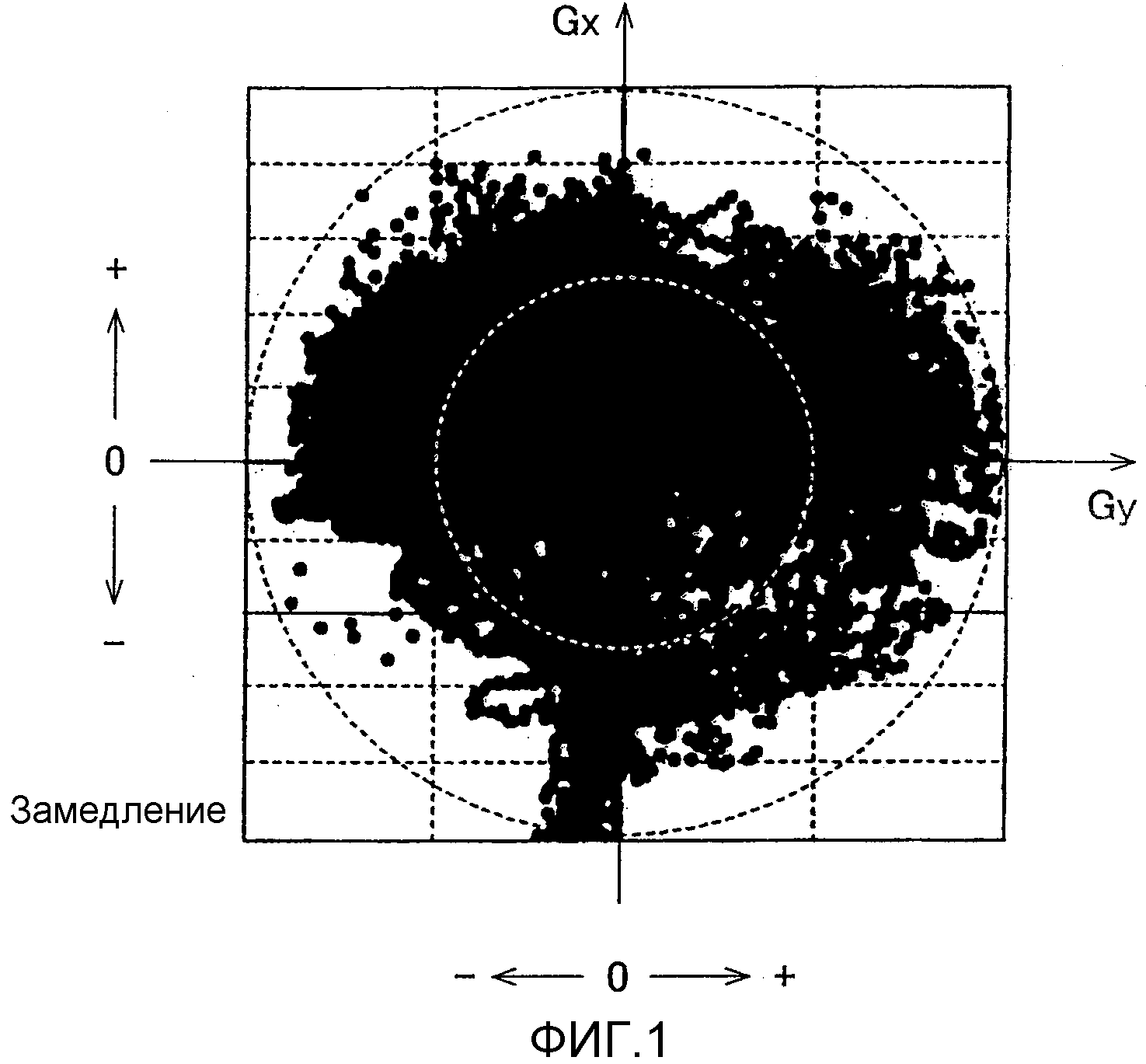
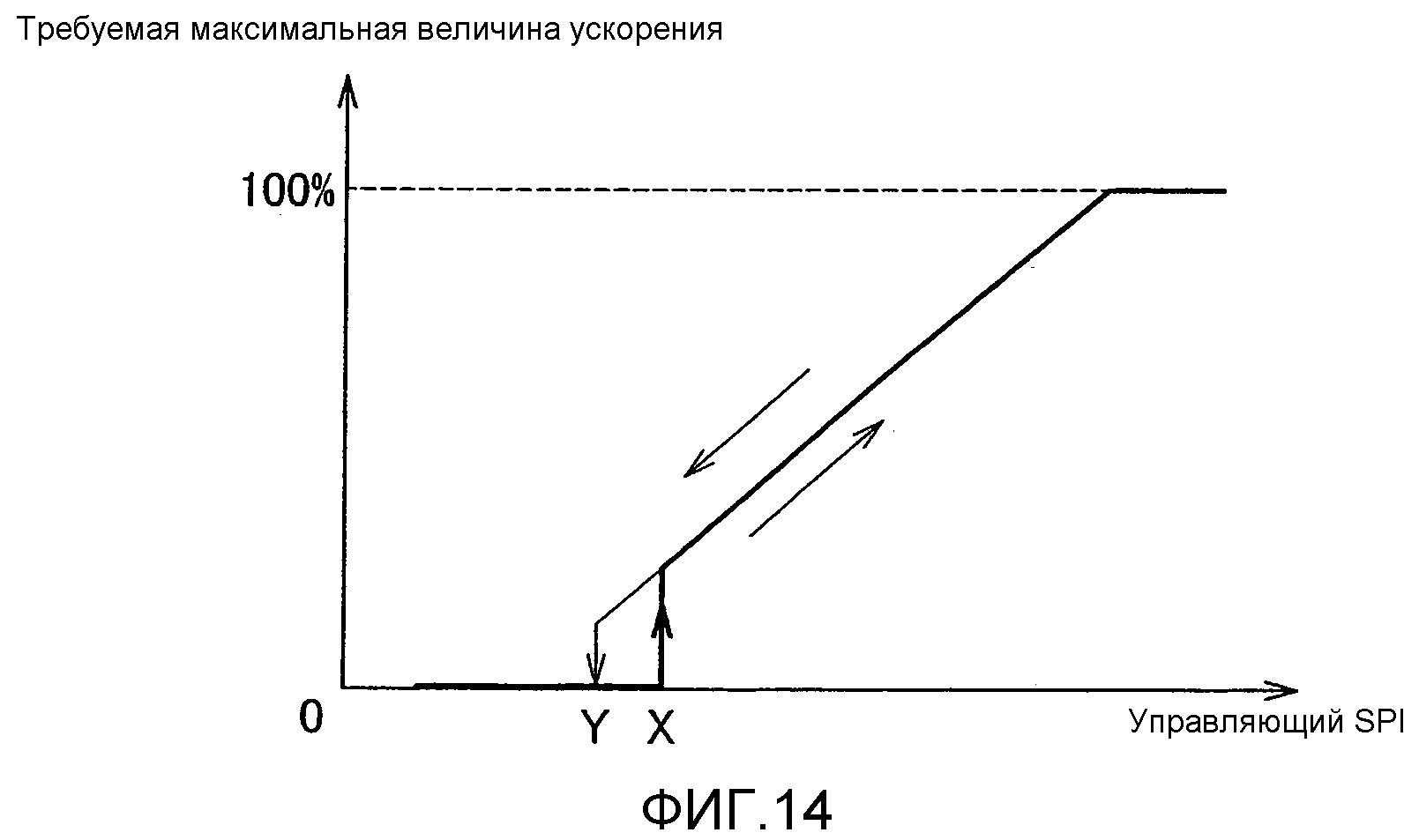
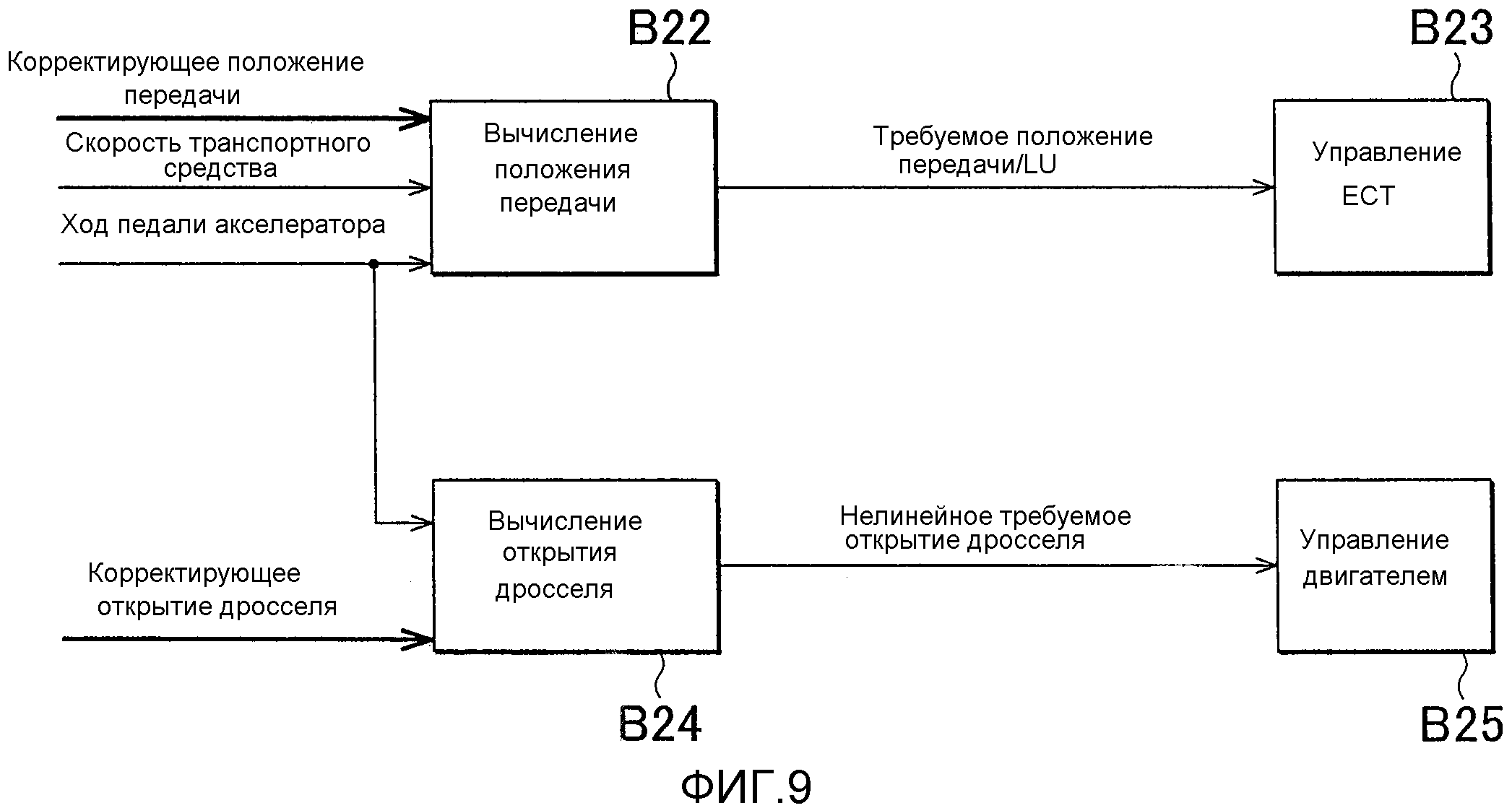
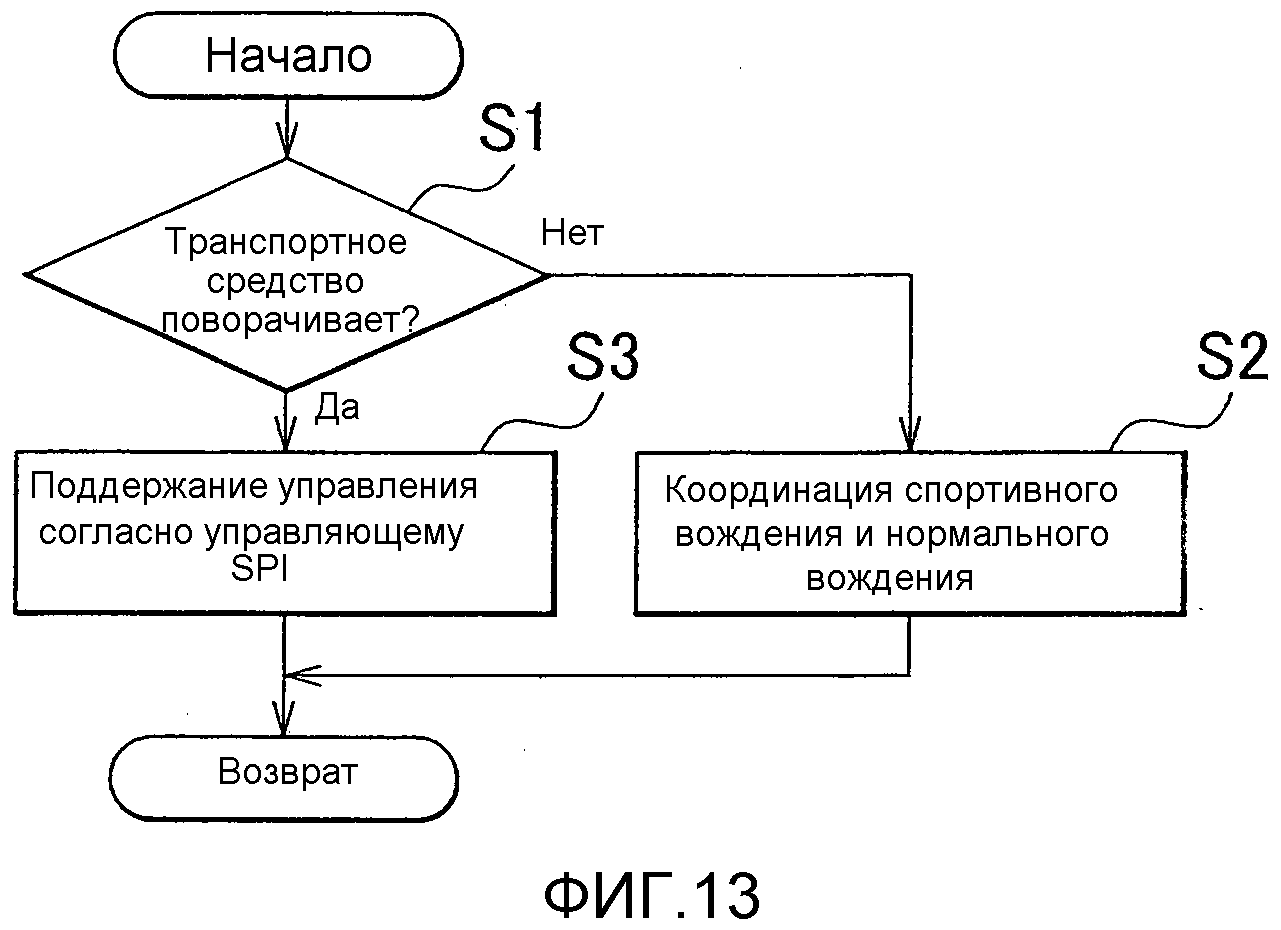
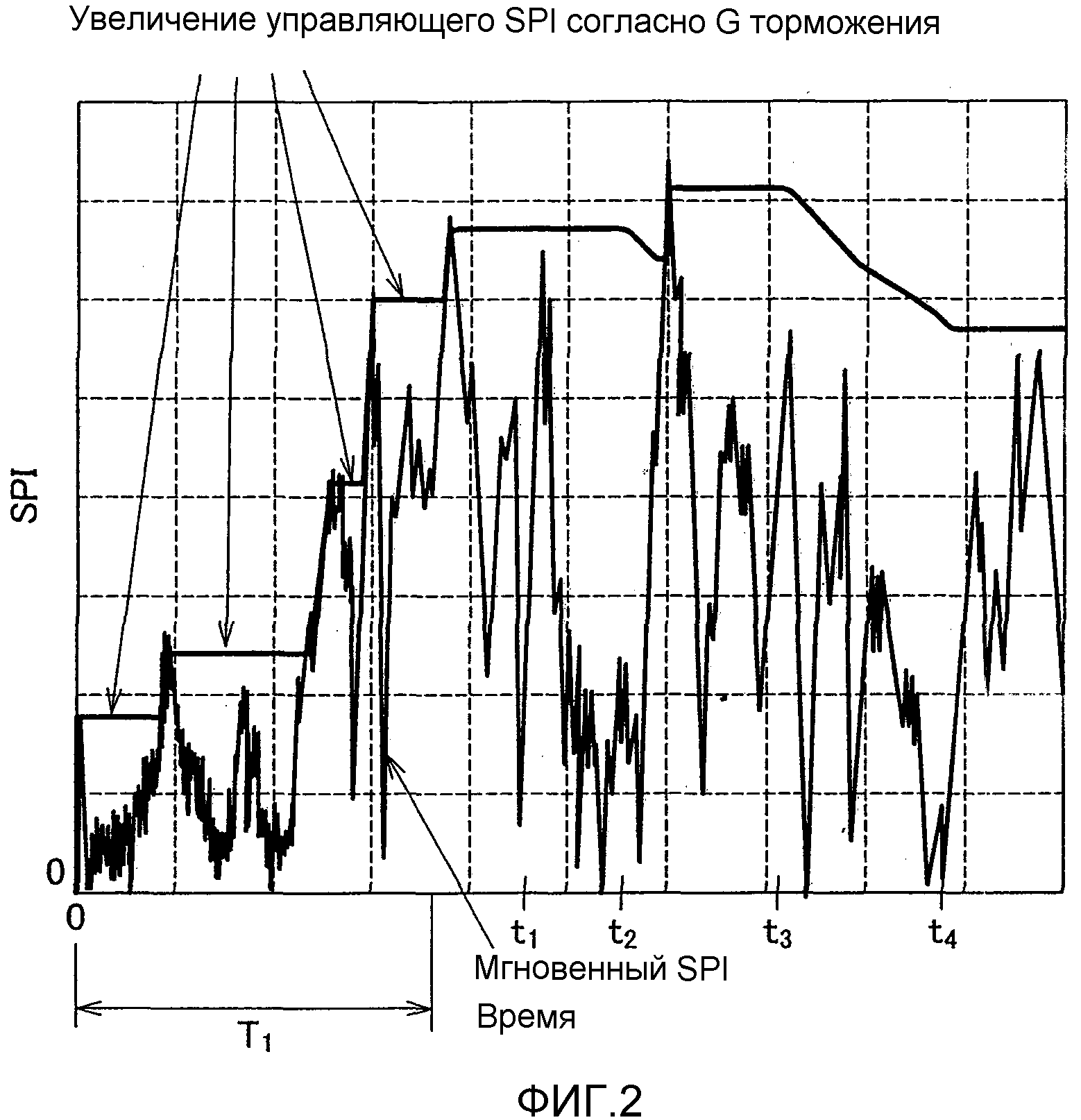
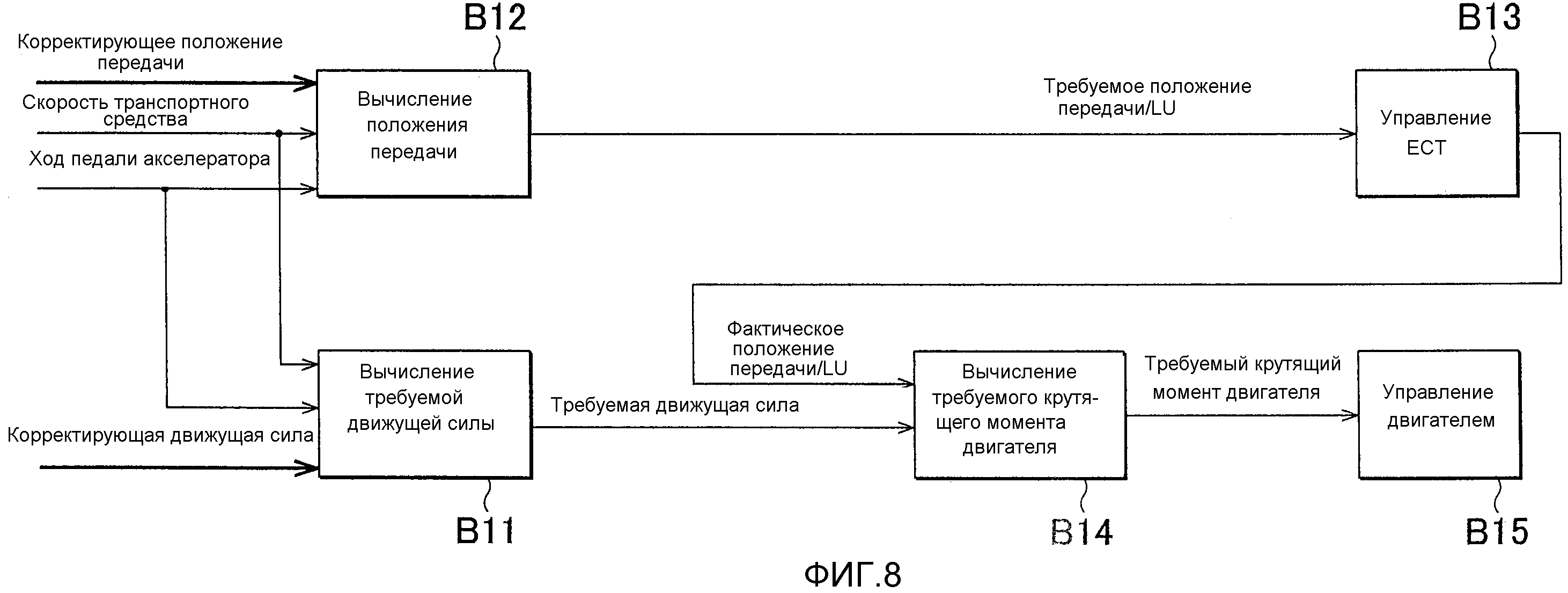
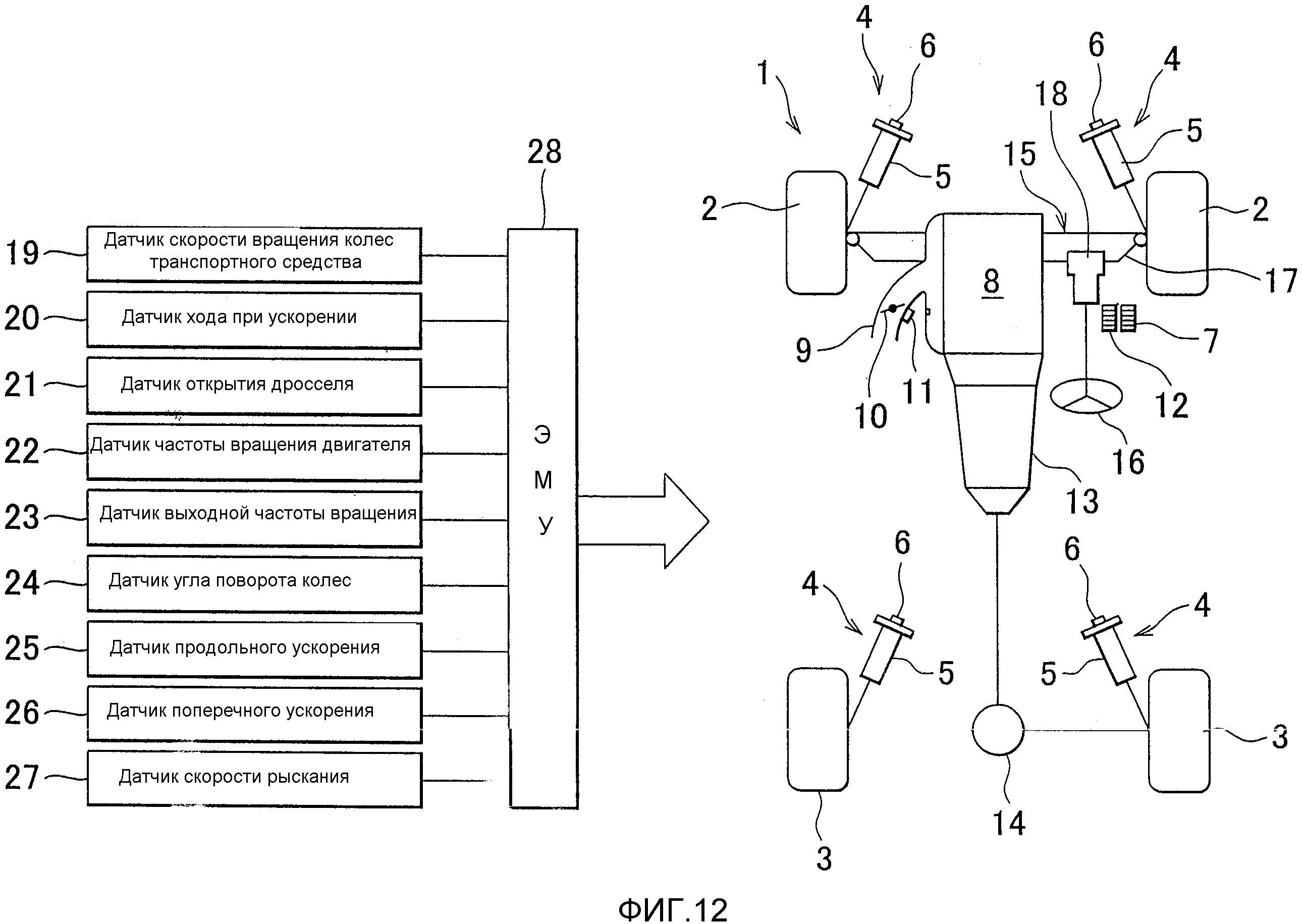
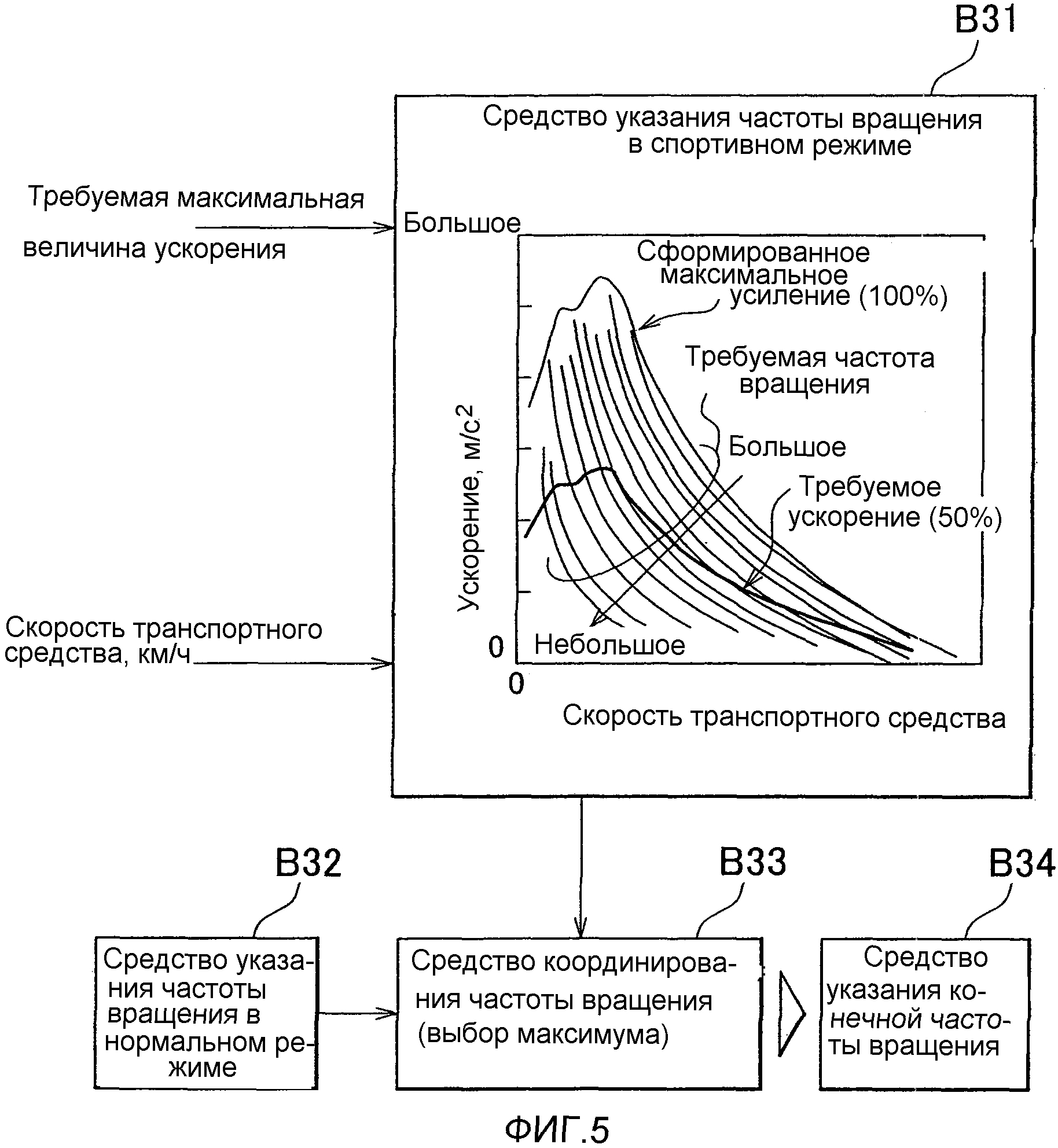
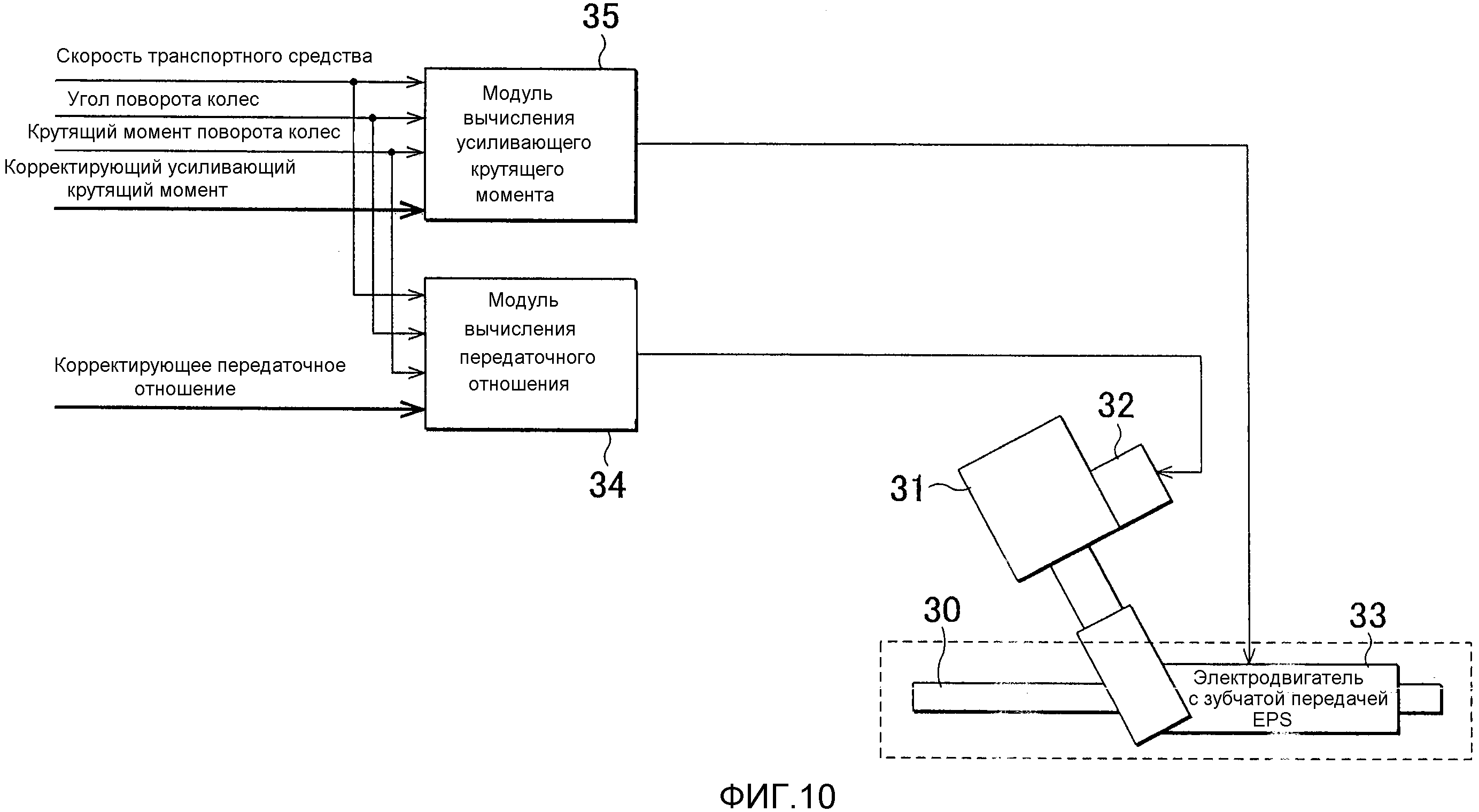
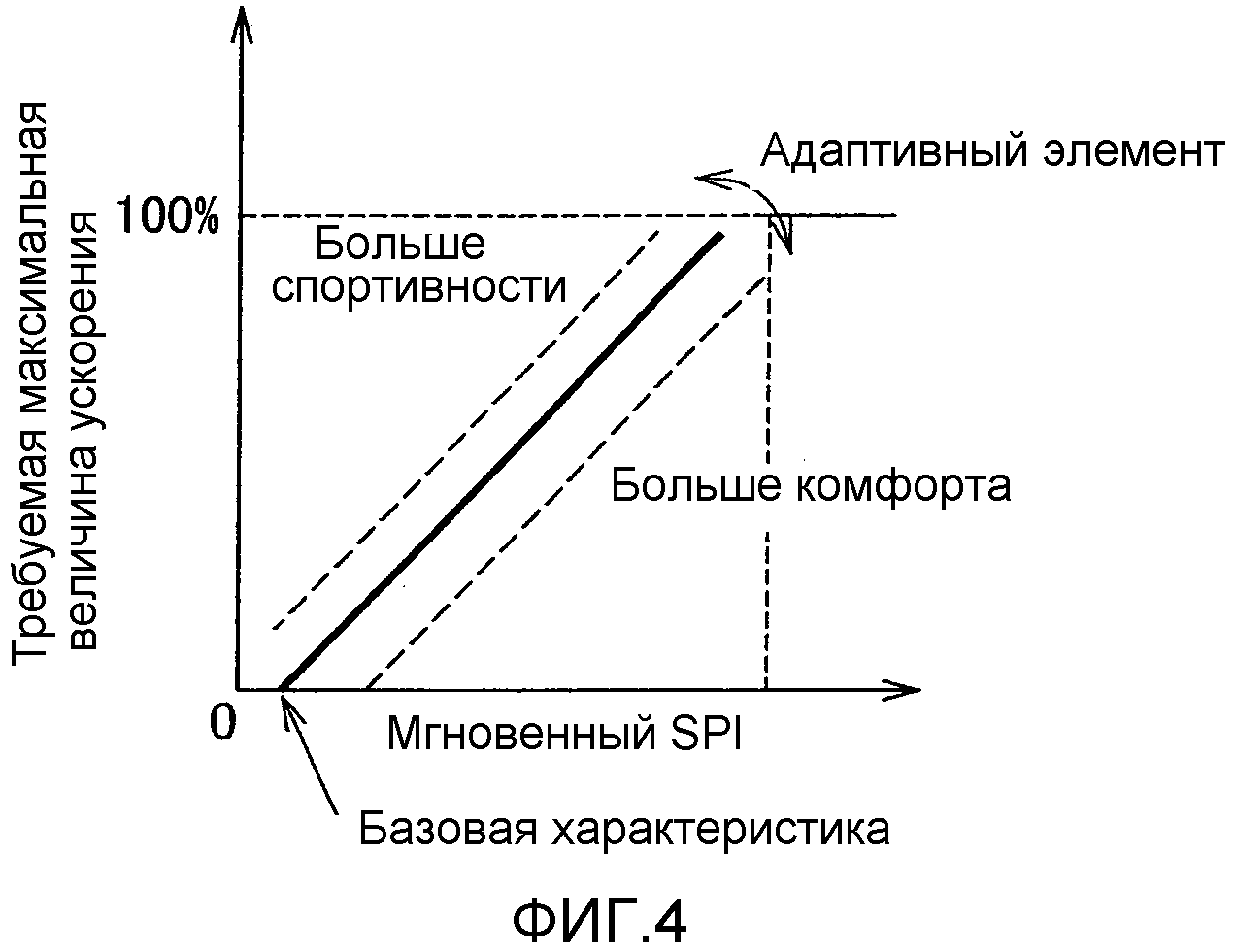
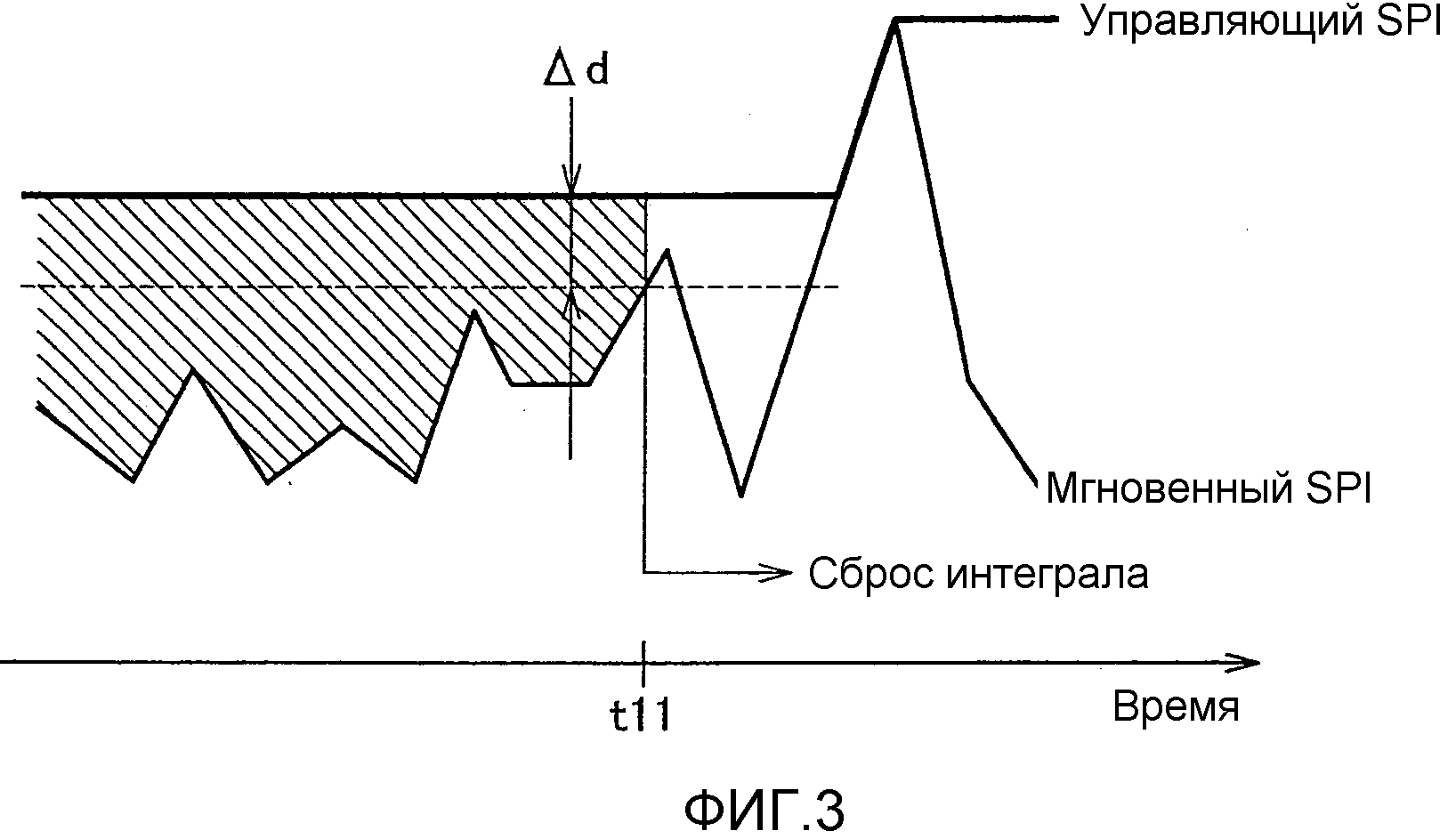
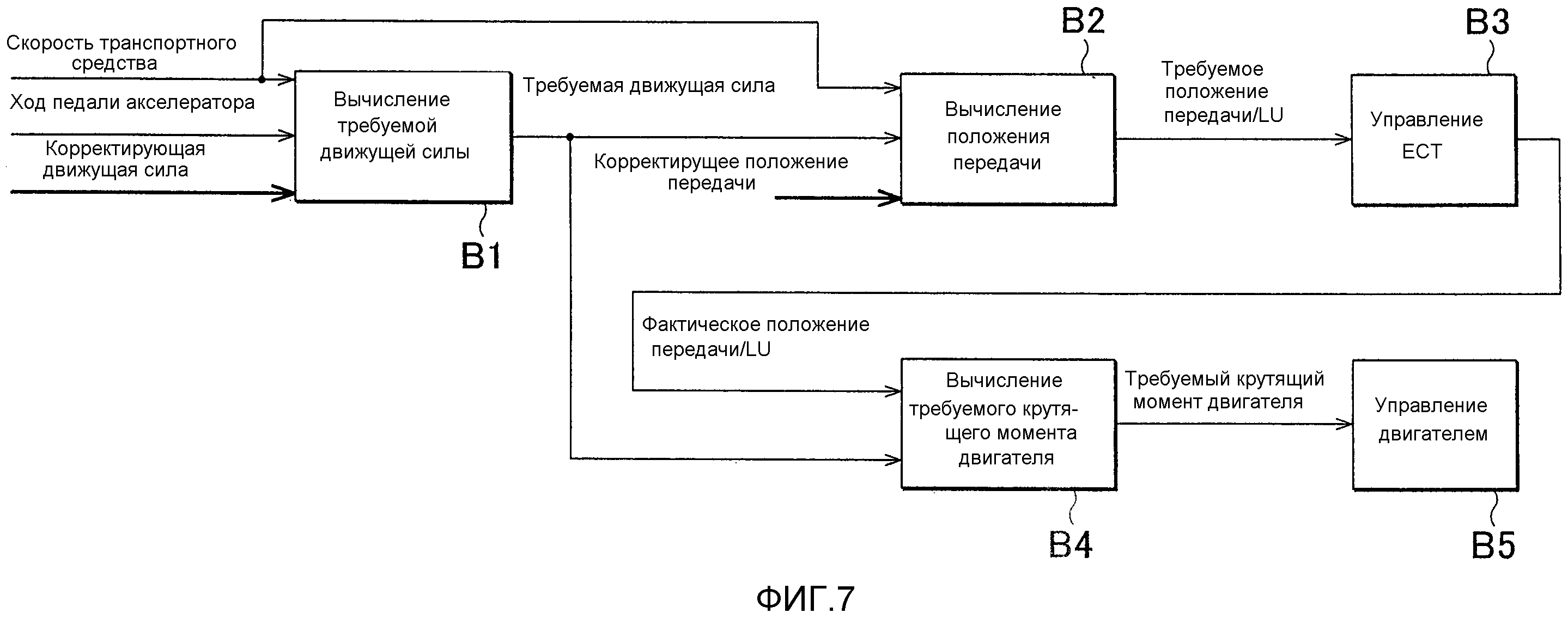
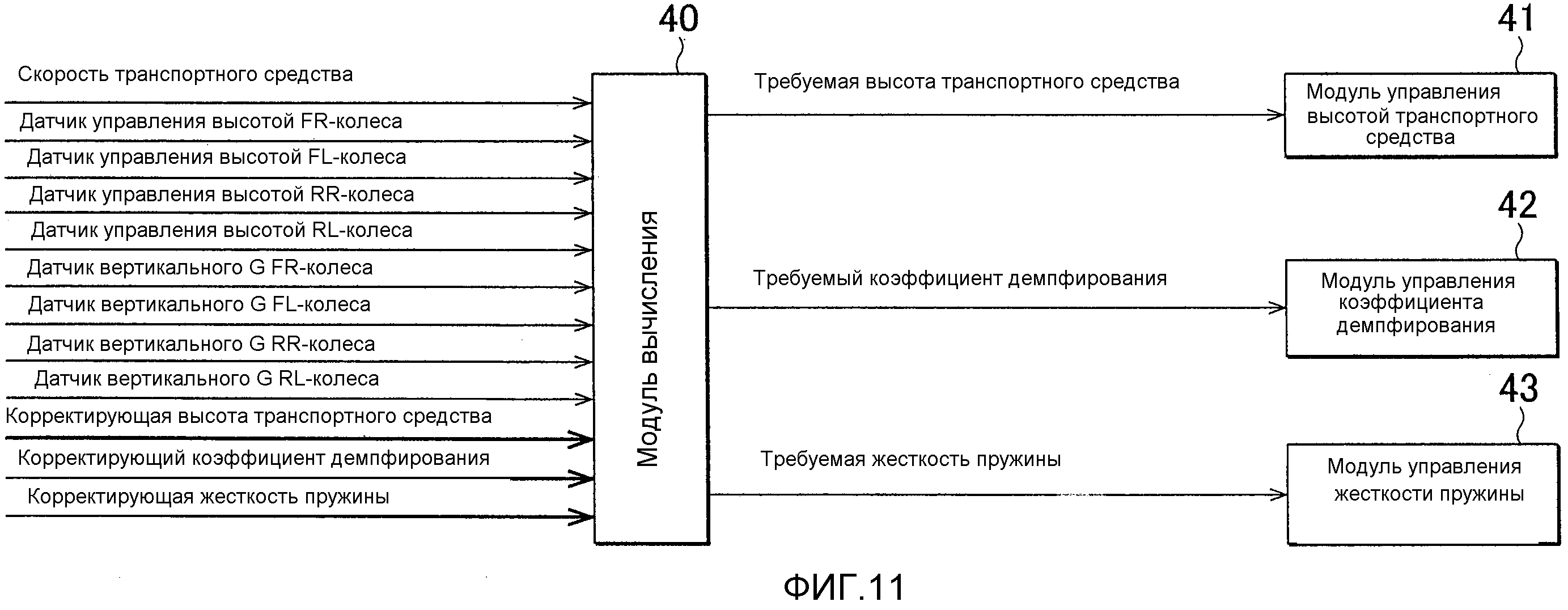
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания

