Результат интеллектуальной деятельности: КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ
Вид РИД
Изобретение
Изобретение относится к области позиционирования транспортных средств на железнодорожном транспорте для обеспечения безопасности движения поездов на железнодорожных станциях.
Известна система для отслеживания положения поезда путем использования дифференциальной навигации DGPS и железнодорожной информации, содержащая установленное на поезде мобильное устройство, включающее приемник навигационных сигналов с антенной, радиостанцию с антенной и блок обработки сигнала, включенный между приемником навигационных сигналов и радиостанцией, базовую станцию, включающую приемник навигационных сигналов с антенной и блок определения дифференциальных поправок, подключенный по сети передачи данных к блоку сбора и обработки дифференциальных поправок, соединенный с приемопередающим устройством для передачи по радиоканалу данных о дифференциальных поправках на радиостанцию мобильного устройства (KR 100742967 В1, G01S 5/14, 25.07.2007).
В известной системе приемник навигационных сигналов мобильного устройства получает от спутниковой навигационной системы координаты поезда, блок обработки формирует соответствующее сообщение и посредством радиостанции передает его на базовую станцию. Мобильное устройство передает на базовую станцию идентификационный номер поезда вместе с координатно-временными параметрами абсолютного положения поездов, полученными от спутниковой навигационной системы. Базовая станция передает значения дифференциальной поправки на мобильное устройство. Мобильное устройство определяет координатно-временные параметры поезда с учетом дифференциальной поправки. Информация о местоположении поезда в режиме реального времени используется мобильным блоком управления.
Известная система позволяет в режиме реального времени с учетом дифференциальной поправки спутниковой навигационной системы определять положение поезда.
Однако в местах с затруднительным приемом сигналов спутниковой навигационной системы определить положение поезда с заданной точностью не представляется возможным.
Известна многоуровневая система управления и обеспечения безопасности движения поездов для крупных железнодорожных станций, содержащая станционное устройство и бортовую аппаратуру, станционное устройство состоит из управляющих вычислительных комплексов, контроллеров сбора данных, электрической централизации, автоматизированного рабочего места электромеханика, автоматизированного рабочего места дежурного по станции, референсной станции и устройства сравнения сигналов, бортовая аппаратура состоит из контроллера бортового, блока индикации, блока управления, датчиков импульсов, приемника спутниковой навигации с антенной, радиостанции с антенной, шкафа управления, подключенного к силовой и тормозной системам локомотива и электропневматической приставки (RU 2403162 C1, B61L 27/00, 10.11.2010).
Известная система осуществляет мониторинг местоположения и передвижения маневровых локомотивов на станции, автоматическое позиционирование локомотивов на маршруте, что позволяет создать информационную платформу для оптимизации работы станции.
При этом определение дифференциальных поправок в известной системе осуществляется на основании сравнения измеренных приемником навигационных сигналов координат референсной станции относительно ее известных координат. Однако для того чтобы результаты сравнения можно было использовать в качестве дифференциальных поправок, должны совпадать наблюдаемые группировки спутников приемником навигационных сигналов референсной станции и приемниками навигационных сигналов подвижных объектов. В реальных условиях это практически невозможно достичь.
Наиболее близким аналогом является система предотвращения столкновения подвижного состава или локомотива с прибывающим или отправляющим со станции поездом, содержащая контрольно-корректирующую станцию и локомотивные части, контрольно-корректирующая станция состоит из приемника спутниковых сигналов, вычислительного блока, радиомодема, сервера, в память которого записана информация о движении поездов и об электронной карте железнодорожной станции с контрольными точками, обозначающими границы защитных зон, дисплея и передатчика корректирующих сигналов. В состав каждой локомотивной части входят бортовой приемник спутниковых сигналов, приемник корректирующих сигналов, бортовая ЭВМ, в память которой записана информация об электронной карте железнодорожной станции с контрольными точками, обозначающими границы защитных зон, исполнительное устройство, дисплей, бортовой радиомодем, измеритель тягового тока, датчик направления движения, датчик автосцепки, датчик давления в тормозном цилиндре, датчик давления в тормозной магистрали, датчик пути и скорости, датчик концевого крана локомотива и клавиатура (RU 2288856 C2, B61L 23/34, 10.12.2006).
В известной системе физические координаты подвижных объектов определяют с учетом дифференциальных поправок, формируемых контрольно-корректирующей станцией, сведения о местоположении подвижного объекта с подвижного носителя направляют на сервер контрольно-корректирующей станции, в памяти которого записана информация о движении поездов и об электронной карте железнодорожной станции с контрольными точками.
При этом вычисление дифференциальных поправок в известной системе осуществляется также на основании сравнения измеренных приемником навигационных сигналов координат контрольно-корректирующей станции относительно ее известных координат. Для того чтобы результаты сравнения можно было использовать в качестве дифференциальных поправок, должны совпадать наблюдаемые группировки спутников приемником навигационных сигналов контрольно-корректирующей станции и приемниками навигационных сигналов подвижных объектов. В реальных условиях это практически невозможно достичь.
Задача, решаемая изобретением, заключается в создании комплексной системы позиционирования подвижных объектов на цифровой модели путевого развития станции, обеспечивающей в единой информационной среде в реальном масштабе времени осуществление непрерывного позиционирования местонахождения подвижных объектов на цифровой модели станции и регистрации их технологических параметров.
Технический результат изобретения заключается в повышении точности и достоверности определения физических координат подвижных объектов, возможности непрерывного позиционирования в режиме реального времени местонахождения подвижных объектов на цифровых моделях станций и регистрации технологических параметров подвижных объектов.
Технический результат достигается тем, что комплексная система позиционирования подвижных объектов на цифровой модели путевого развития станции содержит, по меньшей мере, одну базовую станцию спутниковой навигационной системы GPS/ГЛОНАСС, выходом подключенную к входу блока вычисления дифференциальных поправок, блок сбора и обработки данных, включающий процессор, соответствующие входы/выходы которого подключены к входам/выходам базы данных и шлюза, блок позиционирования, включающий контроллер, к входам/выходам которого подключены выходы/входы блока памяти цифровых моделей путевого развития станций и базы данных, автоматизированное рабочее место администратора системы и размещенные на подвижных объектах навигационные коммуникационные устройства, каждое из которых содержит приемник навигационных сигналов, выполненный с возможностью работы в дифференциальном режиме спутниковой навигационной системы, радиостанцию GSM/GPRS, дополнительно включающую адаптер Wi-Fi и слоты для двух сим-карт, блок инерциальной навигационной системы, контроллер, два съемных носителя памяти, CAN-интерфейс, блок питания и микропроцессор, соответствующие входы/выходы которого соединены непосредственно с входами/выходами контроллера, приемника навигационных сигналов, радиостанции GSM/GPRS и блока инерциальной навигационной системы, а через соединительный разъем - с входами/выходами первого съемного носителя памяти, второй съемный носитель памяти подключен через соединительный разъем к соответствующему входу/выходу контроллера, другой вход/выход которого через CAN-интерфейс соединен с разъемом для подключения к бортовому блоку контроля параметров движения подвижного объекта, при этом выход блока вычисления дифференциальных поправок, входы/выходы процессора блока сбора и обработки данных, контроллера блока позиционирования и аппаратно-программного устройства автоматизированного рабочего места администратора системы подключены к сети передачи данных железнодорожного транспорта, а радиостанция GSM/GPRS навигационного коммуникационного устройства посредством радиоканала через сеть GSM/GPRS по протоколу TCP/IP подключена к входу/выходу шлюза блока сбора и обработки данных.
Для расширения функциональных возможностей в системе позиционирования подвижных объектов на цифровой модели путевого развития станции другой вход/выход контроллера навигационного коммуникационного устройства через CAN-интерфейс соединен с разъемом для подключения к бортовому блоку контроля параметров движения подвижного объекта.
Для повышения надежности система включает резервный аналогичный вычислитель дифференциальных поправок, выход которого подключен к сети передачи данных железнодорожного транспорта, и резервный аналогичный блок позиционирования, выход которого подключен к сети передачи данных железнодорожного транспорта.
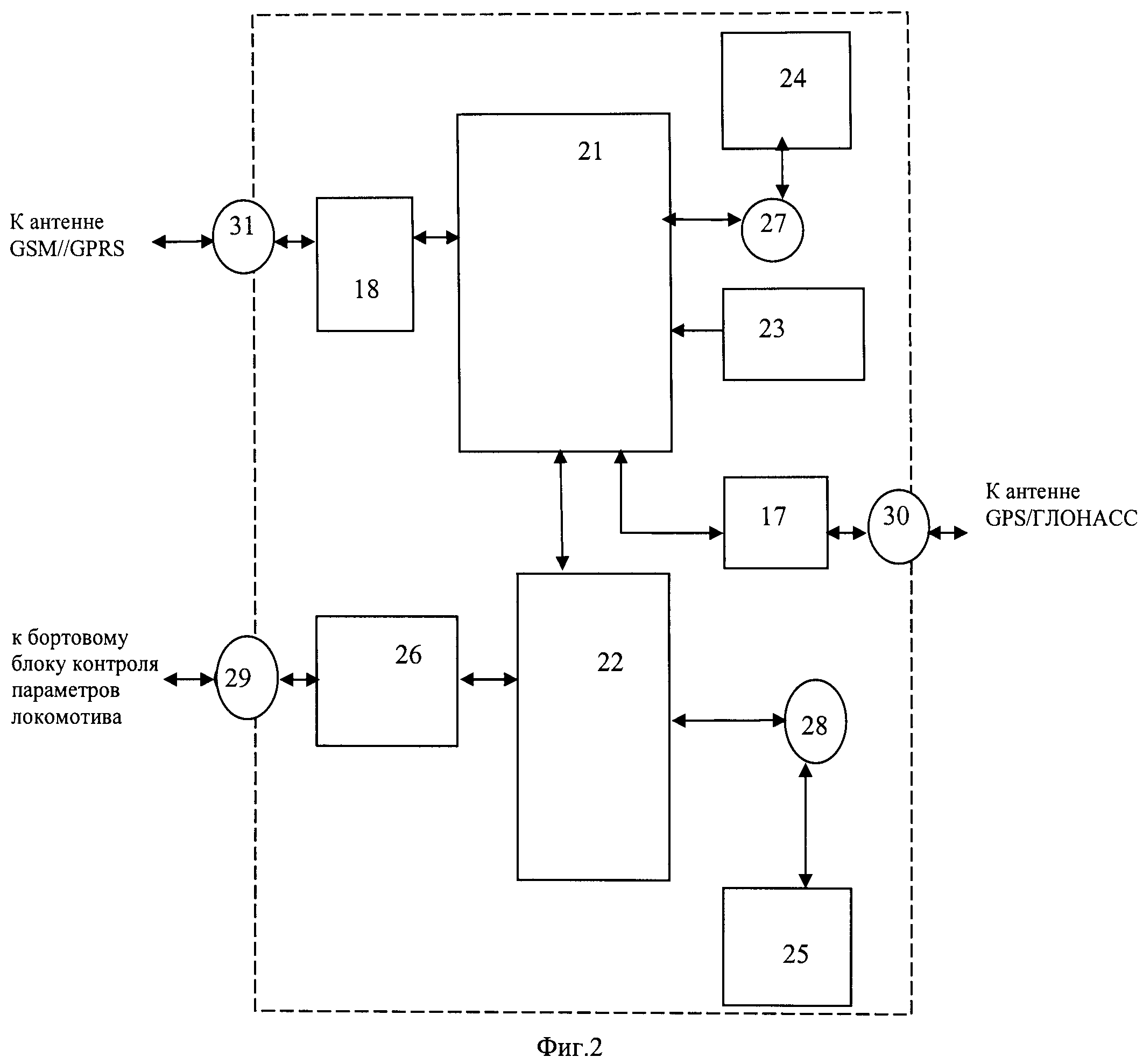
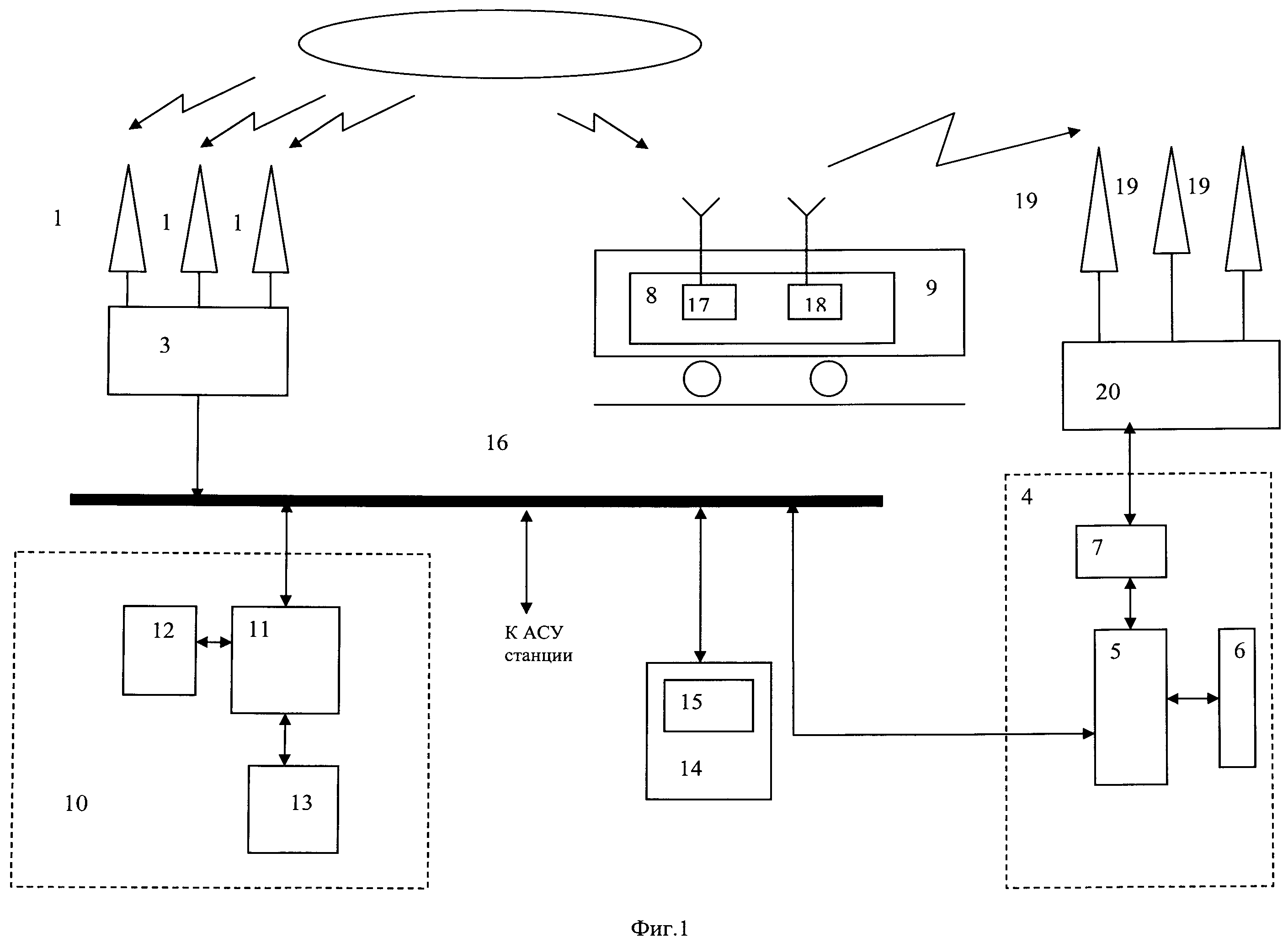
Сущность изобретения поясняется чертежами на фиг.1 и 2. На фиг.1 представлена структурная схема варианта выполнения комплексной системы позиционирования подвижных объектов на цифровой модели путевого развития станции, на фиг.2 представлена структурная схема варианта выполнения навигационного коммуникационного устройства.
Комплексная система позиционирования подвижных объектов на цифровой модели путевого развития станции включает установленные на территории железнодорожной станции сеть базовых станций 1, связанных по радиоканалу со спутниковой навигационной системой 2 GPS/ГЛОНАСС, каждая из которых подключена к входу блока 3 вычисления дифференциальных поправок, блок 4 сбора и обработки данных, включающий процессор 5, соответствующие входы/выходы которого подключены к входам/выходам базы 6 данных и шлюза 7, навигационные коммуникационные мобильные устройства 8, установленные на подвижных объектах 9, блок 10 позиционирования, содержащий контроллер 11, к входам/выходам которого подключены выходы/входы блока 12 памяти цифровых моделей путевого развития станций и базы 13 данных, и автоматизированное рабочее место 14 администратора системы.
При этом выход вычислителя 3, входы/выходы процессора 5 блока 4 сбора и обработки данных, контроллера 11 блока 10 позиционирования и аппаратно-программного устройства 15 автоматизированного рабочего места 14 подключены к сети 16 передачи данных железнодорожного транспорта.
Навигационное коммуникационное мобильное устройство 8 каждого подвижного объекта 9 включает приемник 17 навигационных сигналов с антенной и радиостанцию 18 GSM/GPRS с антенной. Приемник 17 навигационных сигналов выполнен с возможностью определения физических координат с учетом дифференциальных поправок.
Радиостанция 18 GSM/GPRS дополнительно включает адаптер Wi-Fi и слоты для двух сим-карт и подключена по радиоканалу через соответствующую базовую станцию 19 сети GSM/GPRS по протоколу TCP/IP к коммутатору 20 сети, входы/выходы которого подключены к выходам/входам шлюза 7. Стабильность работы радиостанции 18 обеспечивается за счет дополнительно введенного адаптера Wi-Fi. Использование слота на две сим-карты позволяет подключать сим-карты различных провайдеров связи.
Навигационное коммуникационное мобильное устройство 8 содержит также микропроцессор 21, контроллер 22, блок 23 инерциальной навигационной системы, два съемных носителя 24 и 25 памяти, CAN-интерфейс 26 и блок питания (на фиг.2 не показан).
При этом соответствующие входы/выходы микропроцессора 21 соединены непосредственно с выходами/входами контроллера 22, приемника 17 навигационных сигналов, радиостанции 18 GSM/GPRS и блока 23 инерциальной навигационной системы, а через соединительный разъем 27 - с выходом/входом съемного носителя 24 памяти. Второй съемный носитель 25 памяти подключен через соединительный разъем 27 к соответствующему входу/выходу контроллера 22, другой вход/выход которого через CAN-интерфейс 26 соединен с разъемом 29 для возможности подключения к бортовому блоку контроля параметров движения подвижного объекта.
Приемник 17 и радиостанция 18 через соединительные элементы 30 и 31 подключены к соответствующим антеннам, установленным на крыше подвижного объекта.
Комплексная система позиционирования подвижных объектов на цифровой модели путевого развития станции работает следующим образом.
Перед началом работы к навигационному коммуникационному устройству 9, установленному на каждом подвижном объекте 9, подключают:
- к разъему 29 вход/выход бортового блока контроля параметров движения подвижного объекта 8;
- к разъему 27 первый 24 носитель съемной памяти, содержащий информацию о векторной карте привязки географических координат к железнодорожным объектам станции, в технологическом процессе работы которой участвует подвижный объект 8;
- к разъему 29 второй 27 носитель съемной памяти;
- к соединительному элементу 30 вывод антенны GPS/ГЛОНАСС;
- к соединительному элементу 31 вывод антенны GSM/GPRS.
После включения и инициализации навигационного коммуникационного устройства 8 радиостанция 18 автоматически устанавливает соединение с блоком 4 сбора и обработки навигационных данных по сети GSM/GPRS по протоколу TCP/IP. Использование сети GSM/GPRS по протоколу TCP/IP позволяет повысить надежность и достоверность информационного обмена между радиостанцией 18 и блоком 4 сбора и обработки навигационных данных.
Подвижными объектами 9 могут быть различные технологические подвижные единицы, связанные с обеспечением перевозочного процесса:
маневровые, поездные локомотивы; путевые механизированные ремонтные машины; автотранспорт оперативных ремонтно-восстановительных служб: связи, путевой автоматики, энергоснабжения, ремонта пути и прочие; автотранспорт дорожной автобазы.
Базовые станции 1 устанавливают на территории железнодорожной станции. Каждая из базовых станций 1 оборудована GPS аппаратурой и специальным программным обеспечением, предназначенным для приема GPS сигналов, анализа полученных измерений, вычисления ошибок ионосферы, отклонений траекторий и часов спутников (на фиг.1 не показаны).
Данные с выходов базовых станций 1, функционирующих в автоматическом режиме, поступают в блок 3 вычисления дифференциальных поправок, который обрабатывает и анализирует результаты измерений, полученные со всех базовых станций 1 сети, и рассчитывает величину дифференциальных поправок.
Данные о дифференциальных поправках блок 3 в форматах RTCM и CMR направляет по сети 16 передачи данных в процессор 5 блока 4 сбора и обработки данных. Процессор 5 направляет их в свою оперативную память. Каждые 2 с данные о дифференциальных поправках обновляются.
Приемник 17 навигационного коммуникационного устройства 9 в режиме реального времени обеспечивает прием навигационных сигналов, характеризующих физические координаты подвижного объекта. Временной интервал обновления данных, поступающих от спутниковой навигационной системы 2 на навигационный приемник 17, не менее 1 с. Сигналы с выхода приемника 17 поступают в микропроцессор 21, который формирует сообщение, содержащее данные о его координатах в данный момент времени, для направления его в блок 4 сбора и обработки данных. Сформированное сообщение микроконтроллер 21 передает на вход радиостанции 18, которая по радиоканалу через базовую станцию 19 сети GSM/GPRS, в зоне покрытия которой находится подвижный объект 9, направляет его в коммутатор 20. С выхода коммутатора 20 через шлюз 7 сообщение поступает на вход процессора 5.
Процессор 5 в ответ на сообщение навигационного коммуникационного устройства 9 на основании сообщения о координатах подвижного объекта, характеризующих его местоположение на станции в данный момент времени, формирует сообщение, включающее информацию о текущей дифференциальной поправке спутниковой навигационной системы, и направляет его в навигационное коммуникационное устройство 8.
Информационное сообщение о текущей дифференциальной поправке процессор 5 направляет через шлюз 7 по сети GSM/GPRS на радиостанцию 18, с выхода которой сообщение через микропроцессор 21 передается в приемник 17. Приемник 17 обрабатывает по заданному алгоритму сигналы спутниковой навигации с учетом дифференциальной поправки и направляет их в микропроцессор 21. Кроме того, приемник 17 направляет в микропроцессор 21 данные о точном времени, скорости и направлении движения локомотива. Формат данных, получаемых от навигационного приемника 17 - NMEA GPRMS, временной интервал обновления данных - не менее 1 с.
Микропроцессор 21 запрашивает со съемного носителя 24 памяти данные векторной карты привязки географических координат к железнодорожным объектам станции. На основании географических координат подвижного объекта 9 и векторной карты станции микропроцессор 21 определяет в режиме реального времени номер пути, на котором в данный момент времени находится подвижный объект 9. Сравнивая географические координаты подвижного объекта 9 с координатами пути станции, микропроцессор 21 формирует признак достоверности навигационных параметров.
Кроме того, в микропроцессор 21 поступают данные блока 23 инерциальной навигационной системы.
Блок 23 инерциальной навигационной системы, в частном случае, включает инерциальный датчик и альтиметр.
С помощью инерциального датчика блок 23 определяет изменения положения локомотива, а с помощью альтиметра - давление атмосферного воздуха, на основании которого определяет изменения высоты положения локомотива над уровнем моря.
Микропроцессор 21 в режиме реального времени обрабатывает данные блока 23 инерциальной навигационной системы и системы спутниковой навигации и по результатам их сравнения формирует признак достоверности навигационных параметров.
Кроме того, микропроцессор 21 формирует признак учета данных блока 24 инерциальной навигационной системы.
Микропроцессор 21 в режиме реального времени автоматически формирует блок данных, в котором присутствуют идентификационный номер сообщения; идентификационный номер подвижного объекта 9; значения географических координат дислокации объекта (широта и долгота); значения даты и времени для временной зоны Гринвичского меридиана (формат UTC), соответствующие моменту определения навигационного решения; значения скорости и направления движения объекта; признак достоверности определения координатно-временных параметров; признак учета данных инерциальной системы; признак отключения электропитания устройства, а также данные, поступающие от внешних устройств.
Блок данных микропроцессор 21 направляет в контроллер 22.
Через CAN-интерфейс 26 в режиме реального времени на другой вход контроллера 22 поступают данные с бортового блока контроля параметров движения подвижного объекта. Контроллер 22 синхронизирует по времени данные бортового блока контроля параметров движения подвижного объекта с данными микропроцессора 21 и формирует информационное сообщение, в которое включает блок данных, сформированный микропроцессором 21, и данные бортового блока контроля параметров движения подвижного объекта. Сформированное информационное сообщение контроллер 22 передает на съемный носитель 25 памяти для хранения и в микропроцессор 21.
Микропроцессор 21 направляет информационное сообщение на вход радиостанции 18 для передачи его по радиоканалу сети связи GSM/GPRS в блок 4 сбора и обработки данных. Передача информационных сообщений о значениях навигационных параметров, синхронизированных по времени с данными бортового блока контроля параметров движения подвижного объекта, осуществляется по протоколу TCP/IP. Среднее значение временного интервала передачи информационных сообщений составляет 5 с.
При этом микроконтроллер 21 и контроллер 22 осуществляют также контроль функционирования режимов CAN-интерфейса 26 и блока питания.
Кроме того, контроллер 22 направляет в бортовой блок контроля параметров движения локомотива через CAN-интерфейс 26 сообщение о местонахождении подвижного объекта.
В случае нарушения радиоканала связи между радиостанцией 18 и блоком 4 сбора и обработки данных радиостанция 18 формирует соответствующий сигнал и направляет его в микропроцессор 21, который регистрирует время его поступления. После восстановления связи передача данных начинается с той части информации, которая не была передана.
Для чего микропроцессор 21 через контроллер 22 запрашивает с носителя 25 памяти данные, начиная со времени регистрации сигнала нарушения радиоканала связи, и направляет их на вход радиостанции 18 для последующей передачи в блок 4 сбора и обработки данных. Использование носителя 25 памяти, на который в режиме реального времени записываются все информационные сообщения, предназначенные для передачи в блок 4 сбора и обработки данных, исключает потерю информации.
Выполнение носителя 25 памяти съемным позволяет использовать его в качестве источника информации для анализа работы подвижного объекта 9 за период проведения технологических операций.
В блоке 4 сбора и обработки данных процессор 5 обрабатывает по заданному алгоритму данные, полученные от навигационного коммуникационного устройства 8 подвижного объекта 9, результаты обработки сохраняет в базе 6 данных. Данные хранятся в базе 6 данных в течение 1 года. На основе сохраненных данных процессор 5 формирует также отчет по результатам анализа маршрутов подвижного объекта 8 и направляет его по сети 16 передачи данных в автоматизированную систему управления станции.
Процессор 5 направляет результаты обработки сообщений по сети 16 передачи данных в блок 10 позиционирования.
В блоке 10 позиционирования контроллер 11 анализирует результаты обработки блока 2 сбора и обработки данных и для каждой станции в режиме реального времени на основе цифровой модели станции определяет положение подвижного объекта 8 на модели станции, его состояние и направляет их в базу 13 данных. Данные цифровой модели конкретной станции контроллер 11 запрашивает в блоке 12 памяти.
Таким образом, в базе 13 данных осуществляется хранение информации о местоположении, элементах движения и контролируемых параметрах подвижных объектов 9.
Кроме того, данные о местоположении подвижных объектов на станции и их состоянии в реальном масштабе времени контроллер 1 раз в 10 секунд через сеть 16 передачи данных направляет в автоматизированную систему управления станции, что позволяет осуществлять оперативный контроль технологического процесса работы станции.
Автоматизированное рабочее место 14 администратора системы установлено в региональном вычислительном центре железной дороги. Функция администратора системы заключается в контроле работоспособности элементов системы, что обеспечивает надежность функционирования системы в целом.
Таким образом, предлагаемая комплексная система позиционирования обеспечивает высокую точность и достоверность определения физических координат подвижных объектов, возможность непрерывного позиционирования в режиме реального времени местонахождения подвижных объектов на цифровых моделях станций и регистрацию технологических параметров подвижных объектов, что позволяет повысить эффективность и безопасность работы станции.
Способ нанесения антифрикционных покрытий на упорные поверхности пятникового узла
Автоматизированная система для управления работой локомотивных бригад на железнодорожном направлении
Способ защиты бетонного фундамента от воздействий сил вспучивания замерзшего грунта
Система для контроля расстояния между следующими друг за другом поездами на основе цифровой радиосвязи
Система для оперативной передачи предупреждений и электронных карт на высокоскоростной поезд
Станционное устройство для системы регулирования движения поездов
Система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу
Система определения координат вагонов в парке станции
Интеллектуальная система мониторинга электросети передвижного выставочно-лекционного комплекса
Пост комплексного контроля дефектов буксовых узлов и колес движущихся вагонов
Способ нанесения антифрикционных покрытий на упорные поверхности пятникового узла
Автоматизированная система для управления работой локомотивных бригад на железнодорожном направлении
Способ защиты бетонного фундамента от воздействий сил вспучивания замерзшего грунта
Система для контроля расстояния между следующими друг за другом поездами на основе цифровой радиосвязи
Система для оперативной передачи предупреждений и электронных карт на высокоскоростной поезд
Станционное устройство для системы регулирования движения поездов
Система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу
Система определения координат вагонов в парке станции
Интеллектуальная система мониторинга электросети передвижного выставочно-лекционного комплекса
Пост комплексного контроля дефектов буксовых узлов и колес движущихся вагонов

