Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к системе управления для транспортного средства, которая выполнена с возможностью управления характеристиками транспортного средства, относящимися к поведению, такими как мощность, рулевое управление, ускорение подвески и т.д. (которые далее называются "характеристиками вождения") согласно окружению движения либо предпочтению или намерению водителя.
Уровень техники
Скорость транспортного средства изменяется посредством управления акселератором и тормозом, и направление движения транспортного средства изменяется посредством рулевого управления. Тем не менее соотношение между рабочей величиной этих устройств от водителя и величиной изменения в поведении транспортного средства определяется с учетом различных требований для транспортного средства, например, энергосбережения, экономии топлива, ходовых качеств, бесшумности и т.д.
Помимо этого, транспортное средство управляется в различных окружающих ситуациях. Например, транспортное средство управляется не только на городских трассах, но также и на шоссе, и иногда транспортное средство преодолевает подъем и едет на спуске. Кроме того, каждый водитель имеет различные предпочтения в ощущении при вождении, и каждый водитель, следовательно, получает различные впечатления от транспортного средства в каждом случае. Транспортное средство может удовлетворять конкретному предпочтению водителя ощущения при вождении в конкретной окружающей ситуации, тем не менее, если ситуация при вождении изменяется, транспортное средство может не удовлетворять ожидаемому ощущению при вождении водителя. Помимо этого, если водитель сменяется, транспортное средство может не предоставлять ожидаемое ощущение при вождении другого водителя. В этих случаях водитель может ощущать, что он должен управлять акселератором, тормозом, рулем и т.д., в большей степени, чем требуется. По этой причине впечатление относительно ощущения при вождении транспортного средства может ухудшаться.
Чтобы разрешать вышеописанную проблему, согласно предшествующему уровню техники, транспортное средство усовершенствовано так, что оно дает возможность водителю выбирать режим вождения для изменения мощности, ускорения, подвески и т.д. транспортного средства вручную посредством переключателя выбора режима. Например, согласно транспортному средству с такой конструкцией, режим вождения может выбираться из спортивного режима, в котором улучшается приемистость и немного повышается жесткость подвески, нормального режима, в котором ускорение и подвеска сдерживаются в определенных рамках, экономичного режима, в котором повышается экономия топлива, и т.д.
Различные виды систем управления для управления поведением транспортного средства согласно предпочтению водителя созданы в предшествующем уровне техники. Согласно этим видам систем, характеристики вождения транспортного средства могут настраиваться без управления переключателем. Например, выложенный патент Японии номер 06-249007 раскрывает систему управления движущей силой для транспортного средства с использованием нейрокомпьютера. В частности, согласно идеям выложенного патента Японии номер 06-249007, соотношение между ходом ускорения и скоростью транспортного средства изучается в качестве модели требуемого ускорения, и чувствительность дросселя вычисляется на основе отклонения между моделью требуемого ускорения и второй моделью опорного ускорения, отражающей манеру езды водителя, и отклонения между второй моделью опорного ускорения и стандартной первой моделью опорного ускорения.
Таким образом, система управления движущей силой, изученная посредством выложенного патента Японии номер 06-249007, выполнена с возможностью изменения характеристики вождения транспортного средства в соответствии с продольным ускорением и манерой езды водителя. Тем не менее, этот вид системы управления должен быть дополнительно усовершенствован, чтобы прогнозировать намерение водителя.
Сущность изобретения
Настоящее изобретение задумано с учетом технических проблем, описанных выше, и его задачей является создание системы управления транспортного средства, допускающей точное отражение намерения водителя в характеристиках вождения транспортного средства.
Для решения вышеуказанной задачи, согласно настоящему изобретению, создана система управления транспортного средства, которая выполнена с возможностью изменения индекса для задания характеристик вождения транспортного средства согласно ускорению транспортного средства. Согласно настоящему изобретению, индекс изменяется различным способом в зависимости от сведений по операции для изменения ускорения, выполняемой водителем.
Если индекс определяется на основе большого абсолютного значения ускорения, не допускается понижение индекса до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, в случае если рабочая величина или скорость изменения рабочей величины является большой. Наоборот, в случае, если рабочая величина или скорость изменения рабочей величины является небольшой, упрощается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения.
В частности, не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, при следующих условиях. Например, не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, в случае, если текущий индекс определяется на основе большого абсолютного значения ускорения, по сравнению со случаем, когда индекс определяется на основе небольшого абсолютного значения ускорения. Также не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, в случае, если транспортное средство движется на высокой скорости, по сравнению со случаем, когда транспортное средство движется на низкой скорости. Помимо этого, также не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, в случае, если градиент склона, по которому движется транспортное средство, является большим, по сравнению со случаем, когда градиент склона, по которому движется транспортное средство, является небольшим.
Согласно настоящему изобретению, включает в себя индекс: первый индекс, который определяется на основе фактического ускорения, определяемого посредством датчика ускорения, и который увеличивается согласно увеличению абсолютного значения фактического ускорения; и второй индекс, который определяется на основе оцененного ускорения, оцененного посредством средства оценки ускорения, и который увеличивается согласно увеличению абсолютного значения оцененного ускорения. Следовательно, вышеуказанные характеристики вождения регулируются на основе большего индекса из первого индекса и второго индекса.
Вышеуказанная операция водителя включает в себя, по меньшей мере, любую из следующего: операция ускорения для изменения выходной мощности основного движителя транспортного средства; операция торможения для торможения транспортного средства; и операция руления для изменения направления движения транспортного средства.
В частности, не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, посредством продления времени, чтобы сохранять индекс, определенный на основе большого абсолютного значения ускорения, в случае, если индекс, определенный на основе большого абсолютного значения ускорения, поддерживается. Альтернативно, в случае, если индекс, определенный на основе большого абсолютного значения ускорения, понижается, не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, посредством уменьшения скорости его изменения или посредством прекращения его изменения.
Как описано выше, не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, посредством продления времени, чтобы сохранять индекс, определенный на основе большого абсолютного значения ускорения, в случае, если индекс, определенный на основе большого абсолютного значения ускорения, поддерживается, и в случае, если индекс, определенный на основе большого абсолютного значения ускорения, понижается, не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, посредством уменьшения скорости его изменения или посредством прекращения его изменения. Согласно настоящему изобретению, дополнительно не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения, до индекса, который должен быть определен на основе небольшого абсолютного значения ускорения, в любом из следующих случаев. В частности, дополнительно не допускается понижение индекса, определенного на основе большого абсолютного значения ускорения: в случае, если рабочая величина или скорость увеличения операции ускорения в таком направлении, что она увеличивает выходную мощность основного движителя транспортного средства, является большой; в случае, если операция торможения выполняется, или рабочая величина операции торможения увеличивается и угол поворота колес или скорость увеличения угла поворота колес операции руления является большим.
Согласно другому аспекту настоящего изобретения, предоставляется система управления транспортного средства, которая выполнена с возможностью изменения индекса для задания характеристик вождения транспортного средства на основе ускорения транспортного средства и изменения, по меньшей мере, любой из характеристики переключения передач, определяющей передаточное число или время изменения передаточного числа, выходной характеристики, определяющей выходную мощность основного движителя относительно операции ускорения, тормозной характеристики относительно операции торможения, характеристики подвески, поддерживающей транспортное средство, и характеристики рулевого управления, определяющей маневренность относительно операции руления, на основе выполнения операции вручную. Согласно настоящему изобретению, система управления транспортного средства с такой структурой отличается тем, что она содержит функцию, чтобы корректировать индекс или характеристики вождения транспортного средства, задаваемые на основе индекса, в случае, если любая из характеристик изменяется посредством операции вручную в идентичном направлении, чтобы изменять упомянутую любую из характеристик посредством операции вручную.
В частности, коррекция характеристик вождения транспортного средства выполняется в случае, если выполняется операция в ручном режиме, в то время как транспортное средство движется, и удовлетворяется предварительно определенное условие, предварительно заданное согласно состоянию движения транспортного средства.
Согласно настоящему изобретению, ускорение включает в себя продольное ускорение в переднезаднем направлении транспортного средства и поперечное ускорение в направлении ширины транспортного средства. Вышеуказанное предварительно определенное условие удовлетворяется в случае, если ускорение транспортного средства находится в какой-либо из области торможения и области ускорения, определенной на основе продольного ускорения и поперечного ускорения, и варьирование синтезированного ускорения из продольного ускорения и поперечного ускорения в расчете на единицу времени меньше предварительно определенного значения.
Между тем, в случае, если ускорение транспортного средства находится в области поворота, которая определяется на основе продольного ускорения и поперечного ускорения, и если доля поперечного ускорения превышает долю продольного ускорения, коррекция характеристик вождения транспортного средства посредством операции в ручном режиме не допускается, чтобы корректировать движущую силу, но коррекция характеристик вождения транспортного средства посредством операции в ручном режиме, помимо движущей силы, разрешается.
Вышеуказанная коррекция характеристик вождения транспортного средства включает в себя, по меньшей мере, любую из коррекции самих характеристик вождения, коррекции индекса, на котором основаны характеристики вождения, и коррекции значения ускорения, на котором основан индекс.
Таким образом, согласно системе управления транспортного средства настоящего изобретения, индекс для задания характеристик вождения транспортного средства изменяется на основе фактического ускорения транспортного средства или оцененного ускорения транспортного средства. Чтобы изменять индекс, не только продольное ускорение, но также и поперечное ускорение и синтезированное ускорение могут быть использованы. Следовательно, характеристики вождения транспортного средства могут регулироваться так, что они повышают быстроходность транспортного средства, в случае, если ускорение увеличивается посредством операции ускорения, в случае, если тормозная сила увеличивается посредством операции торможения, в случае, если поперечное ускорение увеличивается посредством увеличения угла поворота колес или посредством увеличения скорости транспортного средства при рулевом управлении транспортного средства, и т.д. Помимо вышеизложенного, сведения по операции, чтобы изменять ускорение, выполняемое водителем, такой как операция ускорения, операция торможения, операция руления и т.д., используются для того, чтобы изменять или задавать индекс. Т.е. намерение водителя для ощущения при вождении отражается на управлении, чтобы задавать характеристики вождения транспортного средства. В частности, согласно вариантам осуществления по п.п.2-7, намерение водителя или предпочтение при вождении водителя может более точно отражаться в характеристиках вождения, чтобы предотвращать ухудшение в маневренности. Следовательно, согласно настоящему изобретению, намерение водителя может отражаться при управлении, чтобы точно регулировать характеристики вождения транспортного средства.
В дополнение к вышеописанным преимуществам, в случае, если характеристика переключения передач, характеристика подвески или характеристика рулевого управления изменяется посредством операции в ручном режиме в случае, когда транспортное средство движется, и предварительно определенные характеристики вождения задаются, характеристики вождения транспортного средства изменяются в таком направлении, что они удовлетворяют намерению или предпочтениям водителя, проявляющимся при операции в ручном режиме, при выполнении операции в ручном режиме. Согласно настоящему изобретению, поэтому намерение или предпочтение при вождении водителя может более точно отражаться в таких характеристиках вождения, как характеристика ускорения/замедления, характеристика рулевого управления и т.д.
Краткое описание чертежей
Фиг.1 является блок-схемой последовательности операций способа, поясняющей пример управления, которое должно выполняться посредством системы управления транспортного средства настоящего изобретения.
Фиг.2 является кругом трения, иллюстрирующим определенное значение продольного ускорения и поперечного ускорения.
Фиг.3 является графиком, указывающим пример изменения в управляющем индексе спортивности согласно изменению в мгновенном индексе спортивности.
Фиг.4 является графиком, указывающим интеграл отклонения между управляющим индексом спортивности и мгновенным индексом спортивности и сброс интеграла.
Фиг.5 является блок-схемой последовательности операций способа, поясняющей подробный пример управления, которое должно выполняться посредством системы управления транспортного средства настоящего изобретения.
Фиг.6 является примером карты для задания порогового значения, используемого для того, чтобы начинать уменьшение индекса, который должен быть использован в примере управления.
Фиг.7 является примером карты, используемой для того, чтобы задавать скорость уменьшения для понижения индекса, который должен быть использован в примере управления.
Фиг.8 является блок-схемой последовательности операций способа, поясняющей другой пример управления, которое должно выполняться посредством системы управления транспортного средства настоящего изобретения.
Фиг.9 является примером карты, используемой для того, чтобы задавать усиление, используемое в управлении, показанном на фиг.8.
Фиг.10 является блок-схемой, показывающей управление для вычисления целевого ускорения и целевого замедления на основе степени открытия акселератора, скорости транспортного средства и M/C-давления или величины нажатия педали тормоза.
Фиг.11 является блок-схемой последовательности операций способа, поясняющей пример управления для вычисления целевого ускорения.
Фиг.12(a) является картой для вычисления целевого замедления на основе M/C-давления, и фиг.12(b) является картой для вычисления целевого замедления на основе нажатия педали тормоза.
Фиг.13 является картой, показывающей соотношение между управляющим индексом спортивности и максимальной требуемой величиной ускорения.
Фиг.14 является видом, показывающим соотношение между скоростью транспортного средства и ускорением, в котором максимальная требуемая величина ускорения на основе управляющего индекса спортивности добавляется, наряду с демонстрацией процедуры для вычисления конечной управляющей скорости.
Фиг.15 является видом, показывающим соотношение между скоростью транспортного средства и ускорением, в котором максимальная требуемая величина ускорения на основе управляющего индекса спортивности добавляется, наряду с демонстрацией процедуры для вычисления конечной ступени коробки переключения передач.
Фиг.16 является блок-схемой, показывающей управление транспортным средством, имеющим трансмиссию с зубчатой передачей, для отражения скорректированной ступени коробки переключения передач и скорректированной движущей силы, полученных на основе управляющего индекса спортивности, в режимах управления для операции переключения передач и выходной мощности двигателя.
Фиг.17 является блок-схемой, показывающей другое управление транспортным средством, имеющим трансмиссию с зубчатой передачей, для отражения скорректированной ступени коробки переключения передач и скорректированной движущей силы, полученных на основе управляющего индекса спортивности, в режимах управления для операции переключения передач и выходной мощности двигателя.
Фиг.18 является блок-схемой, показывающей еще одно другое управление транспортным средством, имеющим трансмиссию с зубчатой передачей, для отражения скорректированной ступени коробки переключения передач и скорректированной движущей силы, полученных на основе управляющего индекса спортивности, в режимах управления для операции переключения передач и выходной мощности двигателя.
Фиг.19 является блок-схемой, показывающей управление для отражения скорректированного передаточного отношения и скорректированного усиливающего крутящего момента, полученных на основе управляющего индекса спортивности в характеристике рулевого управления.
Фиг.20 является блок-схемой, показывающей управление для отражения высоты транспортного средства, скорректированного коэффициента демпфирования и скорректированной жесткости пружины, полученных на основе управляющего индекса спортивности в характеристике подвески.
Фиг.21(a)-(d) являются видами, схематично показывающими положения переключения передач и вращающийся переключатель функционального механизма для изменения передаточного числа в ручном режиме.
Фиг.22 является блок-схемой последовательности операций способа, поясняющей пример управления для коррекции характеристик вождения на основе операции в ручном режиме.
Фиг.23 является картой для коррекции максимальной требуемой величины ускорения на основе операции в ручном режиме.
Фиг.24 является видом, схематично показывающим транспортное средство, к которому применяется настоящее изобретение.
Наилучший способ осуществления изобретения
Далее будет подробно описано настоящее изобретение. Система управления транспортного средства согласно настоящему изобретению может задавать и изменять характеристики транспортного средства, относящиеся к поведению (которые далее называются "характеристиками вождения"), в соответствии с индексом, вычисленным на основе ускорения транспортного средства. В частности, характеристики вождения транспортного средства включают в себя характеристику ускорения, характеристику поворачиваемости рулевого управления, характеристику подвески. Согласно настоящему изобретению, индекс, используемый для того, чтобы регулировать характеристики вождения транспортного средства, вычисляется не только на основе продольного ускорения, но также и на основе поперечного ускорения и синтезированного ускорения из продольного ускорения и поперечного ускорения. Чтобы регулировать характеристики вождения транспортного средства, фактическое ускорение транспортного средства, определяемое посредством устройства определения, например, датчика ускорения, может быть использовано для того, чтобы вычислять индекс. Альтернативно, оцененное ускорение, оцененное на основе рабочей величины акселератора, рабочей величины тормоза, угла поворота колес, скорости транспортного средства и т.д., также может быть использовано для того, чтобы вычислять индекс.
Согласно настоящему изобретению, вышеописанное ускорение должно отражаться в индексе. Т.е. индекс представляет предпочтение при вождении или манеру езды водителя, проявляющуюся как ускорение. Следовательно, индекс может называться "индексом спортивности". В частности, индекс изменяется фундаментально на основе ускорения, но не основывается на нем полностью и напрямую. Помимо этого, поскольку индекс тем самым изменяется согласно изменению в ускорении, индекс, по существу, увеличивается до большего значения в случае, если ускорение (включающее в себя абсолютное значение ускорения, идентичное в следующем пояснении) увеличивается и, по существу, снижается до меньшего значения в случае, если ускорение снижается.
В дополнение к вышеописанному ускорению, согласно системе управления транспортного средства настоящего изобретения, сведения по операции, выполняемой водителем для управления транспортным средством, используются для того, чтобы изменять индекс для задания характеристик вождения транспортного средства. В частности, сведения по операциям, выполняемым водителем, чтобы изменять ускорение транспортного средства, отражаются в индексе. Например, величина нажатия и скорость нажатия педали акселератора, чтобы изменять выходную мощность двигателя и соотношение переключения передач трансмиссии, величина нажатия и скорость нажатия педали тормоза, чтобы изменять тормозную силу, угол поворота колес и скорость поворота колес, чтобы изменять угол поворота транспортного средства, и т.д. используются для того, чтобы изменять индекс.
Фиг.1 является блок-схемой последовательности операций способа, указывающей базовую процедуру управления, которое должно выполняться посредством настоящего изобретения. Процедура, показанная на фиг.1, многократно выполняется с предварительно определенными короткими интервалами в случае, когда транспортное средство движется, или когда главный переключатель включается. Прежде всего, индекс вычисляется на основе продольного ускорения Gx и поперечного ускорения Gy (включающих в себя как ускорение, так и замедление) (на этапе S100). Например, индекс может быть вычислен на основе фактического продольного ускорения Gx и фактического поперечного ускорения Gy, определяемых посредством устройства определения ускорения (т.е. датчика ускорения), выполненного с возможностью определения ускорения в каждом направлении. Альтернативно, индекс также может быть вычислен на основе оцененного продольного ускорения Gx и оцененного поперечного ускорения Gy, оцененных из потребности приведения в движение на основе нажатия акселератора, потребности в торможении на основе нажатия педали тормоза, потребности в поворачивании на основе угла поворота колес и т.д. Чтобы определять ускорения Gx и Gy, датчик ускорения может размещаться по отдельности в продольном и поперечном направлениях. Альтернативно, ускорения Gx и Gy также могут получаться посредством размещения одного датчика ускорения под углом в 45 градусов относительно продольного направления транспортного средства и посредством вычисления на основе ускорения, определяемого посредством датчика, таким образом размещаемого под углом.
Как описано выше, предпочтение при вождении водителя логически выводится из ускорения, которое должно отражаться в индексе, и индекс используется для того, чтобы регулировать характеристики вождения транспортного средства. Следовательно, индекс увеличивается согласно увеличению ускорения и снижается согласно снижению ускорения и при удовлетворении предварительно определенного другого условия. Т.е. индекс должен легко быть изменен в таком направлении, что он повышает быстроходность (т.е. спортивность) транспортного средства, но затруднено его изменение в противоположном направлении. Как описано выше, оба из фактического ускорения и оцененного ускорения могут быть использованы для того, чтобы вычислять индекс. Следовательно, согласно настоящему изобретению, индекс, вычисленный на основе фактического ускорения, называется "первым индексом", а индекс, вычисленный на основе оцененного ускорения, называется "вторым индексом".
Затем определяется то, удовлетворяется или нет условие, чтобы увеличивать индекс, т.е. обновлять индекс в таком направлении, что он повышает быстроходность транспортного средства (на этапе S101). В частности, в случае, если полученное ускорение или его пиковое значение превышает предыдущее значение, ответом этапа S101 является "Да". В этом случае индекс обновляется до значения на основе полученного текущего ускорения (на этапе S102), и процедура затем возвращается.
Наоборот, в случае, если полученное текущее ускорение или его пиковое значение меньше предыдущего значения, так что ответом этапа S101 является "Нет", индекс поддерживается равным предыдущему значению (на этапе S103). Затем пороговое значение, используемое для того, чтобы определять удовлетворение условия, чтобы изменять индекс, определяется (на этапе S104). В частности, пороговое значение задается на основе сведений по операциям, выполняемым водителем, чтобы ускорять или замедлять транспортное средство и поворачивать транспортное средство. С этой целью следующие параметры, такие как степень Pa открытия акселератора и ее скорость ∆Pa изменения, выполнение операции тормоза Br или скорость ∆Br изменения рабочей величины тормоза Br, угол θ поворота колес или его скорость ∆θ изменения и т.д., могут быть использованы для того, чтобы определять пороговое значение. В частности, пороговое значение задается равным большему значению, если эти параметры являются большими, и в случае, если пороговое значение задается равным большому значению, предотвращается простое понижение индекса.
После такого задания порогового значения, используемого в качестве критерия, чтобы понижать индекс, определяется то, выявлено или нет условие, чтобы понижать индекс, на основе порогового значения, определенного таким образом (на этапе S105). Т.е. сведения по операциям, выполняемым водителем, отражаются в индексе для задания характеристик вождения транспортного средства. Примеры условия, чтобы понижать пороговое значение, поясняются ниже. В случае если ответом этапа S105 является "Нет", индекс не понижается, и процедура возвращается, чтобы поддерживать предыдущее значение индекса. Наоборот, в случае, если ответом этапа S105 является "Да", шаблон понижения индекса задается (на этапе S106). Шаблон, который должен задаваться на этапе S106, используется для того, чтобы определять соотношение понижения (т.е. скорость понижения) индекса и способ понижения индекса (например, пошагово или линейно). В частности, шаблон понижения индекса также задается на основе вышеописанных параметров для задания порогового значения, таких как степень Pa открытия акселератора и ее скорость ∆Pa изменения, выполнение операции торможения Br или скорость ∆Br изменения рабочей величины торможения Br, угол θ поворота колес или его скорость ∆θ изменения и т.д. С этой целью карта для понижения индекса подготавливается заранее, и скорость понижения и шаблон понижения индекса определяются со ссылкой на карту. Затем значение индекса понижается (на этапе S107), и процедура возвращается.
Таким образом, согласно системе управления транспортного средства настоящего изобретения, не только ускорение транспортного средства, но также и сведения по операции, выполняемой водителем, чтобы изменять поведение транспортного средства, отражаются в индексе для регулирования характеристик вождения транспортного средства. Следовательно, предпочтение при вождении водителя точно отражается в характеристиках вождения транспортного средства, так что ощущение при вождении транспортного средства может регулироваться в соответствии с предпочтением водителя.
Далее подробнее поясняется вышеописанное управление, т.е. система управления транспортного средства настоящего изобретения. Прежде всего, пример транспортного средства, к которому применяется настоящее изобретение, должен поясняться в дальнейшем. В частности, система управления транспортного средства применяется к транспортному средству с использованием двигателя или электромотора в качестве основного движителя, скорость и направление движения которого управляются водителем. Фиг.24 является блок-схемой, показывающей пример транспортного средства. Как показано на фиг.24, транспортное средство 1 содержит пару передних колес 2 и пару задних колес 3. В частности, каждое из передних колес 2 выступает в качестве управляемого колеса, а каждое из задних колес 3 выступает в качестве ведомого колеса. Эти колеса 2 и 3 по отдельности присоединены к непоказанному кузову транспортного средства через подвеску 4. Подвеска 4 является традиционным устройством подвески, состоящим, главным образом, из непоказанной пружины и амортизатора (т.е. демпфера) 5. Амортизатор 5, показанный на фиг.24, выполнен с возможностью поглощать удар с использованием гидравлического сопротивления воздуха или жидкости, и гидравлическое сопротивление в нем может увеличиваться и уменьшаться посредством электромотора 6, выступающего в качестве актуатора. Например, в случае увеличения гидравлического сопротивления в амортизаторе 5 жесткость подвески 4 повышается, так что затрудняется опускание транспортного средства 1. Как результат, ощущение при вождении транспортного средства 1 становится гораздо более спортивным, чем комфортным. Помимо этого, высота транспортного средства 1 может регулироваться посредством регулирования сжатого воздуха в амортизаторе 5.
Хотя не показано конкретно на фиг.24, передние и задние колеса 2 и 3 по отдельности содержат тормозной механизм. Эти тормозные механизмы приводятся в действие, чтобы применять тормозную силу к колесам 2 и 3 посредством нажатия педали 7 тормоза, размещаемой около сиденья водителя.
Традиционный двигатель внутреннего сгорания, электромотор, комбинация двигателя и электромотора и т.д. могут быть использованы в качестве основного движителя транспортного средства 1, и в примере, показанном на фиг.24, двигатель внутреннего сгорания 8 используется в качестве основного движителя. Как показано на фиг.24, дроссельный клапан 10 для управления впуском воздуха размещается во впускной трубе 9 двигателя 8. В частности, дроссельный клапан 10 является электронным дроссельным клапаном, который открывается и закрывается посредством актуатора 11, к примеру, электромотора с электрическим управлением. Актуатор 11 приводится в действие в соответствии с нажатием педали 12 акселератора, размещаемой в сиденье водителя, т.е. в соответствии со степенью открытия акселератора, тем самым регулируя степень открытия дроссельного клапана 10 до предварительно определенного угла.
Соотношение между степенью открытия акселератора и степенью открытия дроссельного клапана 10 может регулироваться произвольно, и если отношение степени открытия акселератора к степени открытия дроссельного клапана составляет приблизительно "один-к-одному", дроссельный клапан 10 реагирует непосредственно на операцию акселератора, так что спортивность транспортного средства 1 повышается. Наоборот, в случае уменьшения степени открытия дроссельного клапана 10 относительно степени открытия акселератора ощущение при вождении транспортного средства 1 сдерживается в определенных рамках. В случае использования электромотора в качестве основного движителя, устройство управления током, к примеру инвертор или преобразователь, используется вместо дроссельного клапана 10. В этом случае соотношение между степенью открытия акселератора и значением тока, т.е. ощущение при вождении транспортного средства 1 изменяется произвольно посредством регулирования тока в соответствии со степенью открытия акселератора посредством устройства управления током.
Трансмиссия 13 соединяется с выходной стороной двигателя 8. Трансмиссия 13 может произвольно изменять передаточное число между входной частотой вращения и выходной частотой вращения. Например, традиционная автоматическая трансмиссия с зубчатой передачей, ременная бесступенчатая трансмиссия, тороидальная трансмиссия может быть использована в транспортном средстве 1. В частности, трансмиссия 13 содержит непоказанный актуатор и может изменять его передаточное число пошагово или непрерывно посредством управления актуатором. По существу, трансмиссия 13 управляется так, что она оптимизирует передаточное число, чтобы повышать экономию топлива. С этой целью карта переключения передач для определения передаточного числа согласно скорости транспортного средства 1 и степени открытия акселератора подготавливается заранее, и операция переключения передач трансмиссии 13 выполняется со ссылкой на карту. Альтернативно, передаточное число трансмиссии 13 оптимизируется посредством вычисления целевой выходной мощности на основе скорости транспортного средства 1 и степени открытия акселератора, вычисления целевой частоты вращения двигателя на основе вычисленной целевой выходной мощности и оптимальной кривой расхода топлива и выполнения операции переключения передач, чтобы достигать полученной целевой частоты вращения двигателя.
Режим вождения транспортного средства 1, к которому применяется система управления транспортного средства согласно настоящему изобретению, может выбираться из режима экономии топлива для уменьшения расхода топлива и мощностного режима для увеличения движущей силы. В частности, в режиме экономии топлива переключение коробки передач на более высокую передачу выполняется на относительно низкой скорости, и передаточное число сохраняется при относительно небольшом значении даже в случае, если транспортное средство управляется на низкой скорости. Наоборот, в мощностном режиме переключение коробки передач на более высокую передачу выполняется на относительно высокой скорости, и передаточное число сохраняется при относительно большом значении даже в случае, если транспортное средство управляется на высокой скорости, тем самым увеличивая движущую силу и повышая ускорение. Это регулирование скорости выполняется посредством переключения карты переключения передач при коррекции потребности приведения в движение или вычисленного передаточного числа. Помимо этого, трансмиссия, к примеру, преобразователь крутящего момента, имеющий блокировочную муфту, может размещаться между двигателем 8 и трансмиссией 13 согласно потребности. Выходной вал трансмиссии 13 соединяется с задними колесами 3 через дифференциал 14, используемый в качестве конечного механизма понижения.
Здесь поясняется механизм 15 рулевого управления для изменения ориентации передних колес 2. Механизм 15 рулевого управления содержит: руль 16; рулевой привод 17, выполненный с возможностью передавать вращение руля 16 на передние колеса 2; и усиливающий механизм 18, выполненный с возможностью усиливать угол поворота колес и силу поворота колес руля 16. Усиливающий механизм 18 содержит непоказанный актуатор и выполнен с возможностью управлять величиной усиления актуатора. Следовательно, отношение силы (или угла) поворота колес руля 16 к фактической силе (или углу) поворота передних колес 2 может быть аппроксимировано как "один-к-одному" посредством уменьшения усиливающей силы усиливающего механизма 18. Как результат, передние колеса 2 могут поворачиваться непосредственно в ответ на вращение руля 16, так что спортивность транспортного средства 1 повышается.
Хотя не показано конкретно, чтобы стабилизировать поведение и ориентацию транспортного средства 1, транспортное средство 1 дополнительно содержит антиблокировочную тормозную систему (сокращенно ABS), систему управления тягой и систему управления стабильностью транспортного средства (сокращенно VSC) для совместного управления этими системами. Эти системы являются известными в данной области техники и выполнены с возможностью стабилизировать поведение транспортного средства 1 посредством предотвращения блокировки и пробуксовки колес 2 и 3. С этой целью данные системы выполнены с возможностью управлять тормозной силой, применяемой к колесам 2 и 3, на основе отклонения между скоростью транспортного средства и скоростью вращения колес при управлении крутящим моментом двигателем. Помимо этого, транспортное средство 1 может содержать навигационную систему для получения данных относительно информации дороги и рассматриваемого маршрута (т.е. данных относительно окружения движения) и переключатель выбора режима для выбора режима вождения вручную из спортивного режима, нормального режима, энергосберегающего режима (т.е. экономичного режима) и т.д. Дополнительно, механизм привода на четыре колеса (4WD), выполненный с возможностью изменять такие характеристики, как способность преодолевать подъемы, ускорение, поворачиваемость и т.д., может размещаться в транспортном средстве 1.
Чтобы получать данные для управления двигателем 8, трансмиссией 13, амортизатором 5 подвески 4, усиливающим механизмом 18 и вышеописанными непоказанными системами, различные виды датчиков размещаются в транспортном средстве 1. Например, датчик 19 определения скорости вращения колес, выполненный с возможностью определения частоты вращения каждого колеса 2 и 3, датчик 20 акселератора, выполненный с возможностью определения степени открытия акселератора, датчик 21 дросселя, выполненный с возможностью определения степени открытия дроссельного клапана 10, датчик 22 частоты вращения двигателя, выполненный с возможностью определения частоты вращения двигателя 8, датчик 23 выходной скорости, выполненный с возможностью определения выходной скорости трансмиссии 13, датчик 24 угла поворота колес, датчик 25 продольного ускорения, выполненный с возможностью определения продольного ускорения (Gx), датчик 26 поперечного ускорения, выполненный с возможностью определения поперечного (или бокового) ускорения (Gy), датчик 27 скорости рыскания и т.д. размещаются в транспортном средстве 1. Здесь датчики ускорения, используемые в вышеописанных системах управления поведением, таких как антиблокировочная тормозная система (ABS) и система управления стабильностью транспортного средства (VSC), могут быть использованы в качестве датчиков 25 и 26 ускорения, и если подушка безопасности размещается в транспортном средстве 1, датчики ускорения для управления приведением в действие подушки безопасности также могут быть использованы в качестве датчиков 25 и 26 ускорения. Помимо этого, как описано, продольное ускорение Gx и поперечное ускорение Gy также могут получаться посредством размещения одного датчика ускорения, ориентированного под предварительно определенным углом относительно продольного направления транспортного средства 1 (например, 45 градусов), и посредством разложения определенного значения на продольное ускорение и поперечное ускорение. Альтернативно, продольное ускорение Gx и поперечное ускорение Gy также могут быть вычислены на основе степени открытия акселератора, нагрузки при движении, угла поворота колес и т.д. Сигналы определения (т.е. данные) этих датчиков 19, 27 передаются в электронный модуль 28 управления (сокращенно ЭМУ). ЭМУ 28 выполнен с возможностью осуществления вычисления на основе данных, введенных в него, и данных и заранее сохраненных программ и вывода результата вычисления в вышеописанные системы или их актуаторы в форме сигнала команды управления. Помимо этого, вышеописанный индекс может быть вычислен не только на основе синтезированного ускорения, состоящего из множества компонентов ускорения, таких как продольный компонент и поперечный (или по ширине) компонент, но также вычислен и на основе однонаправленного ускорения, такого как продольное ускорение.
Система управления транспортного средства согласно настоящему изобретению может отражать состояние вождения транспортного средства при управлении поведением транспортного средства. В частности, состояние вождения включает в себя продольное ускорение, поперечное ускорение, ускорение по углу рыскания, ускорение по углу крена и синтезированное ускорение, состоящее из множества компонентов ускорения в различных направлениях. По существу, в случае вождения транспортного средства с требуемой скоростью в требуемом направлении или в случае регулирования поведения транспортного средства как требуемого поведения в соответствии с окружением движения, таким как поверхность дороги, транспортное средство ускоряется во множестве направлений. Это означает то, что состояние вождения транспортного средства в некоторой степени отражает окружение движения и предпочтение при вождении водителя. По этой причине, согласно настоящему изобретению, система управления транспортного средства выполнена с возможностью отражать состояние вождения транспортного средства при управлении поведением транспортного средства.
Как описано выше, поведение транспортного средства включает в себя ускорение, движение при повороте, подскакивание и подпрыгивание подвески 4, крен, "галопирование" и т.д. Следовательно, согласно системе управления транспортного средства настоящего изобретения, вышеприведенные состояния вождения или движения транспортного средства используются в качестве фактора изменения характеристик вождения транспортного средства. С этой целью значение ускорения любого из направлений или значение синтезированного ускорения может быть использовано в качестве индекса для изменения характеристик вождения транспортного средства без коррекции. Тем не менее, чтобы уменьшать расхождение между ожидаемым ощущением при вождении водителя и фактическим ощущением при вождении транспортного средства, эти значения ускорения могут быть скорректированы так, что они используются в качестве индекса для регулирования характеристик вождения транспортного средства.
Здесь поясняется "индекс спортивности (сокращенно SPI)" в качестве примера вышеописанного индекса. В частности, индекс спортивности является индексом, представляющим намерение водителя или состояние вождения транспортного средства. Согласно настоящему изобретению, индекс спортивности может получаться посредством синтезирования множества (абсолютных значений) ускорений в различных направлениях. В частности, синтезированное ускорение из продольного ускорения Gx и поперечного ускорения Gy сильно влияет на поведение транспортного средства в направлении движения. Следовательно, такое значение синтезированного ускорения используется в качестве "мгновенного индекса спортивности". Например, мгновенный индекс спортивности может быть вычислен посредством следующей формулы:
Мгновенный индекс Iin спортивности=(Gx2+Gy2)1/2
Здесь ускорения, которые должны быть использованы для того, чтобы вычислять мгновенный индекс Iin спортивности, не должны быть ограничены ускорением, определяемым посредством датчиков ускорения. Т.е. ускорения, вычисленные или оцененные из операций водителя, например, степень открытия акселератора, угла поворота колес, нажатие педали тормоза и т.д., также могут быть использованы для того, чтобы вычислять мгновенный индекс спортивности. В частности, формулировка "мгновенного индекса Iin спортивности" - это индекс, определенный посредством получения ускорения движущегося транспортного средства в каждом направлении и в каждый момент и посредством вычисления на основе полученного мгновенного ускорения. Т.е. мгновенный индекс Iin спортивности является физической величиной. Здесь формулировка выражения "в каждый момент" - это каждый момент времени для того, чтобы вычислять мгновенный индекс Iin спортивности в каждом цикле вычисления, повторяемого с предварительно определенной продолжительностью цикла.
По меньшей мере, одно из положительного ускорения и отрицательного ускорения (т.е. замедления) продольного ускорения Gx может быть нормализовано или взвешено так, что оно используется в вышеприведенной формуле. В случае вождения транспортного средства фактическое отрицательное ускорение превышает фактическое положительное ускорение. Тем не менее, водитель не может чувствовать такую разность между фактическим отрицательным ускорением и фактическим положительным ускорением в большинстве случаев. Т.е. водитель, по существу, неспособен распознавать разность между фактическим отрицательным ускорением и фактическим положительным ускорением. Следовательно, чтобы корректировать расхождение между значением фактического ускорения и ускорением, распознанным водителем, продольное ускорение Gx может быть нормализовано посредством увеличения определенного или вычисленного значения положительного ускорения либо посредством уменьшения определенного или вычисленного значения отрицательного ускорения (т.е. замедления). В частности, такая нормализация может быть выполнена посредством получения соотношения между максимальными определенными или вычисленными значениями положительного ускорения и отрицательного ускорения и умножения полученного соотношения на определенное или вычисленное значение положительного или отрицательного ускорения. Альтернативно, определенное или вычисленное значение значения отрицательного ускорения для поперечного ускорения Gy может быть взвешено так, что оно корректирует расхождение. Например, продольная движущая сила и поперечная сила, сформированные посредством шины, могут указываться в круге трения. Аналогично, эта нормализация или взвешивание является процессом, чтобы поддерживать максимальные ускорения в каждом направлении в кругу предварительно определенного радиуса посредством взвешивания, по меньшей мере, одного из значений положительного и отрицательного ускорения. Как результат такой нормализации и взвешивания, влияние положительного ускорения и влияние отрицательного ускорения на управление, чтобы изменять характеристики вождения транспортного средства, различается. Например, значение положительного ускорения и значение отрицательного ускорения для продольного ускорения Gx взвешиваются таким образом, что они увеличивают влияние положительного ускорения на управление, чтобы изменять характеристики вождения транспортного средства, по сравнению с влиянием отрицательного ускорения. Здесь поперечное ускорение может превышать положительное ускорение из продольного ускорения Gx. Следовательно, поперечное ускорение Gy также может быть нормализовано или взвешено.
Таким образом, степень расхождения между значением фактического ускорения и ускорением, чувствуемым водителем, отличается в зависимости от направления ускорения. Например, степень расхождения между значением фактического ускорения и ускорением, чувствуемым водителем в направлении рыскания транспортного средства, отличается от степени расхождения в направлении крена транспортного средства. Следовательно, согласно системе управления транспортного средства настоящего изобретения, степень, чтобы отражать ускорение при управлении, чтобы изменять характеристики вождения транспортного средства, другими словами, степень, чтобы изменять характеристики вождения транспортного средства согласно ускорению, может различаться в зависимости от направления ускорения.
Фиг.2 является кругом трения, иллюстрирующим значения датчика поперечного ускорения Gy и нормализованные значения продольного ускорения Gx. Эти значения, указанные на фиг.2, собраны посредством вождения транспортного средства в тестовом курсе, моделирующем обычные дороги. Как можно видеть из фиг.2, поперечное ускорение Gy также имеет тенденцию значительного увеличения в случае замедления транспортного средства, и оба из продольного ускорения Gx и поперечного ускорения Gy, в общем, формируются в круге трения.
Согласно настоящему изобретению, "управляющий индекс Iout спортивности", который должен быть использован в управлении для изменения характеристик вождения транспортного средства, получается на основе вышеописанного мгновенного индекса Iin спортивности. В частности, управляющий индекс Iout спортивности сразу увеличивается с увеличением мгновенного индекса Iin спортивности, но понижается после задержки относительно снижения мгновенного индекса Iin спортивности. В частности, управляющий индекс Iout спортивности понижается на основе удовлетворения конкретного условия. Фиг.3 является графиком, указывающим управляющий индекс Iout спортивности, изменяемый согласно колебанию мгновенного индекса Iin спортивности. В частности, мгновенный индекс Iin спортивности, показанный на фиг.3, соответствует проиллюстрированным значениям, указываемым на фиг.2. Между тем, управляющий индекс Iout спортивности задается на основе значения локального максимума мгновенного индекса Iin спортивности, и управляющий индекс Iout спортивности поддерживается до удовлетворения предварительно определенного условия. Таким образом, управляющий индекс Iout спортивности увеличивается быстро, но понижается относительно медленнее.
В частности, в течение периода T1 от начала управления мгновенный индекс Iin спортивности колеблется согласно изменению в ускорении, являющемуся результатом торможения или поворачивания транспортного средства и т.д. Как показано на фиг.3, колеблющийся мгновенный индекс Iin спортивности увеличивается локально до максимального значения до удовлетворения предварительно определенного условия, чтобы обновлять управляющий индекс Iout спортивности. В этом случае управляющий индекс Iout спортивности задается на основе каждого значения локального максимума мгновенного индекса Iin спортивности. Следовательно, управляющий индекс Iout спортивности увеличивается пошагово в течение периода T1, и когда управляющий индекс Iout спортивности задается на основе значения локального максимума мгновенного индекса Iin спортивности, управляющий индекс Iout спортивности, заданный таким образом, не обновляется до тех пор, пока мгновенный индекс Iin спортивности не увеличивается до большего значения локального максимума. Затем, когда условие, чтобы понижать управляющий индекс Iout спортивности, удовлетворяется, например, когда транспортное средство, поворачиваемое при одновременном ускорении, начинает двигаться прямо вперед при одновременном ускорении в момент t2 или t3 времени, управляющий индекс Iout спортивности начинает понижаться. Т.е. управляющий индекс Iout спортивности понижается в случае, если поддержание предыдущего большого значения управляющего индекса Iout спортивности предположительно не совпадает с намерением водителя. В частности, согласно настоящему изобретению, такое условие, чтобы понижать управляющий индекс Iout спортивности, удовлетворяется согласно истекшему времени.
Более конкретно, такое вышеуказанное условие, что "поддержание предыдущего большого значения управляющего индекса Iout спортивности предположительно не совпадает с намерением водителя", является случаем, когда несоответствие между управляющим индексом Iout спортивности, поддерживаемым до текущего значения, и мгновенным индексом Iin спортивности является относительно большим, и такое несоответствие между индексами непрерывно накапливается. Например, управляющий индекс Iout спортивности не понижается, даже если мгновенный индекс Iin спортивности понижается мгновенно в случае, если педаль акселератора временно возвращается в исходное положение водителем в случае, когда транспортное средство двигается на повороте при одновременном ускорении. Между тем, в случае, если мгновенный индекс Iin спортивности колеблется ниже управляющего индекса Iout спортивности в течение определенного периода времени в случае, когда педаль акселератора непрерывно возвращается в исходное положение, тем самым постепенно замедляя транспортное средство, вышеуказанное условие, чтобы понижать управляющий индекс Iout спортивности, удовлетворяется. Таким образом, продолжительность, в течение которой мгновенный индекс Iin спортивности остается ниже управляющего индекса Iout спортивности, может быть использована в качестве условия, чтобы понижать управляющий индекс Iout спортивности. Чтобы более точно отражать фактическое состояние движения транспортного средства в управляющем индексе Iout спортивности, временное интегрирование (или накопление) отклонения между поддерживаемым управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности может быть использовано в качестве условия, чтобы понижать управляющий индекс Iout спортивности. В этом случае управляющий индекс Iout спортивности понижается, когда временное интегрирование отклонения между этими индексами достигает предварительно определенного порогового значения. С этой целью это пороговое значение может быть определено произвольно на основе теста в ходе вождения или моделирования, выполняемого на основе намерения водителя. Альтернативно, пороговое значение также может быть определено на основе результатов анкетирования по ощущению при вождении транспортного средства. В случае использования временного интегрирования в качестве условия, чтобы понижать управляющий индекс Iout спортивности, управляющий индекс Iout спортивности должен быть понижен с учетом продолжительности несоответствия мгновенного индекса Iin спортивности и управляющего индекса Iout спортивности, в дополнение к отклонению между управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности. Следовательно, в этом случае фактическое состояние движения или поведение транспортного средства может отражаться при управлении, чтобы более точно изменять характеристики вождения транспортного средства.
В примере, показанном на фиг.3, продолжительность, чтобы поддерживать управляющий индекс Iout спортивности до момента t2 времени, превышает продолжительность, чтобы поддерживать управляющий индекс Iout спортивности до момента t3 времени. Эти продолжительности, чтобы поддерживать управляющий индекс Iout спортивности, определяются посредством управления, которое должно поясняться в дальнейшем. В частности, как указано на фиг.3, управляющий индекс Iout спортивности увеличивается до предварительно определенного значения в конце вышеуказанного периода T1 и поддерживается. В этом случае мгновенный индекс Iin спортивности повышается мгновенно в момент t1 времени перед моментом t2 времени, в который условие, чтобы понижать управляющий индекс Iout спортивности, должно удовлетворяться. Следовательно, интеграл отклонения между управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности в этом случае меньше предварительно определенного значения, и управляющий индекс Iout спортивности поддерживается к моменту t2 времени. Здесь это предварительно определенное значение, чтобы понижать управляющий индекс Iout спортивности, может задаваться произвольно на основе теста в ходе вождения или моделирования, выполняемого на основе намерения водителя, с учетом ошибки в вычислении мгновенного индекса Iin спортивности. В случае если мгновенный индекс Iin спортивности тем самым повышается близко к управляющему индексу Iout спортивности, это означает то, что фактическое состояние движения транспортного средства в этот момент времени является аналогичным состояниям ускорения и поворота, на которых основан поддерживаемый текущий управляющий индекс Iout спортивности. Т.е. хотя определенный период времени истек с момента времени, в который сохраненный текущий управляющий индекс Iout спортивности задан, фактическое состояние движения транспортного средства по-прежнему является аналогичным условию в момент времени, когда поддерживаемый текущий управляющий индекс Iout спортивности задается. Следовательно, в этом случае начало понижения управляющего индекса Iout спортивности задерживается, даже если мгновенный индекс Iin спортивности колеблется ниже поддерживаемого текущего управляющего индекса Iout спортивности. Например, начало понижения управляющего индекса Iout спортивности может быть задержано посредством сброса истекшего времени (т.е. времени накопления) или интеграла отклонения с момента времени, в который текущий управляющий индекс Iout спортивности задан, и повторного начала накопления истекшего времени или интегрирования отклонения. Альтернативно, начало понижения управляющего индекса Iout спортивности также может быть задержано посредством вычитания предварительно определенного значения из истекшего времени управляющего индекса Iout спортивности или интеграла отклонения между индексами Iout и Iin или прерывания накопления истекшего времени или интегрирования отклонения в течение предварительно определенного периода времени.
Фиг.4 является графиком, указывающим вышеуказанный интеграл отклонения между управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности и сброс интеграла. На фиг.4 затененная область соответствует интегралу отклонения между управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности. В примере, указываемом на фиг.4, сброс интеграла отклонения выполняется в момент времени t11, в который несоответствие между управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности становится меньшим предварительно определенного значения Ad, и интегрирование отклонения между этими индексами Iout и Iin повторно начинается с момента t1 времени. Следовательно, предотвращается удовлетворение условия, чтобы понижать управляющий индекс Iout спортивности в момент времени t11, так что управляющий индекс Iout спортивности поддерживается равным предыдущему значению. Затем, когда мгновенный индекс Iin спортивности превышает управляющий индекс Iout спортивности после повторного начала интегрирования отклонения между индексами Iout и Iin, управляющий индекс Iout спортивности обновляется до значения локального максимума мгновенного индекса Iin спортивности. Управляющий индекс Iout спортивности, обновляемый таким образом, должен поддерживаться, и интегрирование отклонения между индексами Iout и Iin снова сбрасывается.
В случае такого определения удовлетворения условия, чтобы понижать управляющий индекс Iout спортивности, на основе интеграла отклонения между индексами Iout и Iin, степень или градиент, чтобы понижать управляющий индекс Iout спортивности, может быть изменена в зависимости от ситуации. Как поясняется, вышеуказанный интеграл является интегралом по времени отклонения между поддерживаемым управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности. Следовательно, в случае, если отклонение между индексами Iout и Iin является большим, интеграл отклонения между индексами Iout и Iin быстро достигает предварительно определенного значения, так что вышеуказанное условие, чтобы понижать управляющий индекс Iout спортивности, удовлетворяется за относительно короткое время. Наоборот, в случае, если отклонение между индексами Iout и Iin является небольшим, интеграл отклонения между индексами Iout и Iin достигает предварительно определенного значения за относительно длительное время. Следовательно, в этом случае то, чтобы удовлетворять вышеуказанному условию, чтобы понижать управляющий индекс Iout спортивности, отнимает относительно много времени. Т.е. в случае, если условие, чтобы понижать управляющий индекс Iout спортивности, удовлетворяется за короткое время, мгновенный индекс Iin спортивности значительно падает относительно поддерживаемого текущего управляющего индекса Iout спортивности. Это означает то, что текущий управляющий индекс Iout спортивности отклоняется от текущего намерения водителя. В этом случае, следовательно, управляющий индекс Iout спортивности понижается на большей скорости или с более крутым градиентом. Наоборот, в случае, если то, чтобы удовлетворять условию, чтобы понижать управляющий индекс Iout спортивности, отнимает относительно много времени, разность между поддерживаемым управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности, колеблющимся ниже управляющего индекса Iout спортивности, является небольшой. Это означает то, что поддерживаемый текущий управляющий индекс Iout спортивности не отклоняется значительно от намерения водителя. В этом случае, следовательно, управляющий индекс Iout спортивности понижается в меньшей скорости или при пологом градиенте. По этой причине расхождение между управляющим индексом Iout спортивности для задания характеристик вождения транспортного средства и намерением водителя может быть скорректировано быстро и точно, так что характеристики вождения транспортного средства могут регулироваться согласно фактическому состоянию движения. Таким образом, в случае поддерживаемого понижения управляющего индекса Iout спортивности, предпочтительно различать степень или градиент, чтобы понижать управляющий индекс Iout спортивности, в зависимости от значения истекшего времени, чтобы поддерживать управляющий индекс Iout спортивности.
Как описано выше, управляющий индекс Iout спортивности является оцифрованным значением потребности водителя с использованием продольного ускорения Gx и поперечного ускорения Gy в качестве параметров. Тем не менее, водителем производятся манипуляции с акселератором и рулем, даже когда транспортное средство управляется на основе в данный момент поддерживаемого управляющего индекса Iout спортивности, и управляющий индекс Iout спортивности может быть изменен посредством этих операций. Например, операции, чтобы изменять ускорение транспортного средства, также могут быть выполнены в случае регулирования расстояния от впереди идущего транспортного средства или в случае смены полосы движения. Т.е. операция, чтобы изменять ускорение, не всегда представляет предпочтение при вождении водителя. Следовательно, помимо этого, чтобы отражать ускорение транспортного средства в качестве предпочтения при вождении водителя при управлении, чтобы изменять характеристики вождения транспортного средства, степень изменения управляющего индекса Iout спортивности изменяется в зависимости от сведений по операциям ускорения и рулевого управления, выполняемым водителем. Пример такого управления показывается на фиг.5.
Процедура, показанная на фиг.5, многократно выполняется с предварительно определенными короткими интервалами посредством включения главного переключателя или пускового переключателя, и такие данные, как управляющий индекс Iout спортивности, инициализируются посредством выключения любого из этих переключателей. Согласно управлению, показанному на фиг.5, прежде всего, мгновенный индекс Iin спортивности вычисляется (на этапе S1), как пояснено выше.
Затем пороговое значение T начала уменьшения, задающее время, чтобы начинать понижение поддерживаемого управляющего индекса Iout спортивности, и скорость Vd уменьшения (т.е. процентное отношение или градиент), чтобы понижать управляющий индекс Iout спортивности, вычисляются по отдельности (на этапе S2). В частности, пороговое значение T начала уменьшения используется для того, чтобы задавать продолжительность для поддержания текущего значения поддерживаемого управляющего индекса Iout спортивности. Т.е. в случае управления временем, чтобы поддерживать управляющий индекс Iout спортивности на основе отклонения между управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности, как описано, пороговое значение T начала уменьшения используется для того, чтобы задавать интеграл отклонения между индексами Iout и Iin. Пороговое значение T может преобразовываться заранее, как показано на фиг.6. В частности, фиг.6 показывает пример для задания порогового значения T с использованием, по меньшей мере, одного из следующих параметров, к примеру, степени Pa открытия акселератора, скорости ∆Pa изменения степени Pa открытия, силы Br нажатия педали тормоза, скорости ∆Br изменения силы Br нажатия педали тормоза, угла поворота колес θ (абсолютное значение) и скорости ∆θ изменения угла θ поворота колес. Как указано на фиг.6, пороговое значение T увеличивается согласно увеличению этих параметров. Например, в случае, если педаль акселератора нажимается резко и глубоко, пороговое значение T увеличивается согласно увеличению его степени Pa открытия или скорости ∆Pa изменения. Как результат, время для поддержания текущего значения управляющего индекса Iout спортивности продлевается. Другими словами, изменение управляющего индекса Iout спортивности не допускается. Аналогично, в случае, если сила Br нажатия педали тормоза применяется, пороговое значение T увеличивается согласно увеличению силы Br нажатия педали тормоза или скорости ∆Br изменения, и в случае, если руль поворачивается, пороговое значение T увеличивается согласно увеличению его угла поворота колес θ или скорости ∆θ изменения. Как результат, пороговое значение T также увеличивается, так что затрудняется изменение управляющего индекса Iout спортивности в обоих случаях.
Характеристики вождения в спортивном режиме транспортного средства, в котором реакция на операции, относящиеся к ускорению, торможению и рулевому управлению, улучшается, предпочтительно должны поддерживаться в зависимости от состояния движения. Например, в случае, если индекс спортивности уже повышен до более высокого значения, в случае, если транспортное средство уже управляется спортивном режиме на относительно высокой скорости, или в случае, если транспортное средство едет вниз по склону, и относительно большая тормозная сила двигателя требуется в ответ на операцию педали акселератора, предпочтительно продлевать время для поддержания управляющего индекса Iout спортивности посредством увеличения порогового значения T, показанного на фиг.6. С этой целью карта, показанная на фиг.6, может быть модифицирована, чтобы увеличивать пороговое значение T согласно увеличению текущего управляющего индекса Iout спортивности, скорости V транспортного средства, градиента δ уклона. Альтернативно, также можно подготавливать вышеописанную модифицированную карту отдельно от карты, показанной на фиг.6, и выполнять вычисление порогового значения T на этапе S2 на основе вышеописанных параметров, представляющих текущее состояние движения в отношении модифицированной карты.
Между тем, скорость Vd уменьшения для понижения управляющего индекса Iout спортивности также может получаться со ссылкой на карту, подготовленную заранее, как показано на фиг.7. В качестве карты, показанной на фиг.6, фиг.7 является примером карты для задания скорости Vd уменьшения с использованием, по меньшей мере, одного из следующих параметров, к примеру, степени Pa открытия акселератора, скорости ∆Pa изменения степени Pa открытия, силы Br нажатия педали тормоза, скорости ∆Br изменения силы Br нажатия педали тормоза, угла θ поворота колес (абсолютное значение) и скорости ∆θ изменения угла θ поворота колес. Как указано на фиг.7, скорость Vd уменьшения понижается согласно увеличению этих параметров. Т.е. затрудняется понижение управляющего индекса Iout спортивности согласно увеличению значений текущего управляющего индекса Iout спортивности, скорости транспортного средства и градиента уклона. Здесь также можно прекращать уменьшение управляющего индекса Iout спортивности посредством сохранения скорости Vd уменьшения равной "0" вместо понижения скорости Vd уменьшения.
В качестве вышеописанного управления, чтобы поддерживать управляющий индекс Iout спортивности, управление, чтобы тем самым не допускать понижения управляющего индекса Iout спортивности, также может выполняться на основе значения текущего управляющего индекса Iout спортивности, скорости V транспортного средства, градиента δ уклона. В этом случае, в частности, скорость Vd уменьшения уменьшается согласно увеличению значений текущего управляющего индекса Iout спортивности, скорости V транспортного средства и градиента δ уклона. С этой целью также можно подготавливать модифицированную карту для задания скорости Vd уменьшения вышеописанным способом отдельно от карты, показанной на фиг.7, и выполнять вычисление скорости Vd уменьшения на этапе S2 на основе вышеописанных параметров, представляющих текущее состояние движения в отношении модифицированной карты.
Затем определяется то, превышает или нет текущее значение мгновенного индекса Iin спортивности текущее значение управляющего индекса Iout спортивности (на этапе S3). В случае если ответом этапа S3 является "Нет", т.е. в случае, если значение мгновенного индекса Iin спортивности, полученное из текущего ускорения транспортного средства, меньше поддерживаемого текущего управляющего индекса Iout спортивности, отклонение между индексами Iout и Iin интегрируется или накапливается (на этапе S4). В частности, отклонение между поддерживаемым текущим управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности, полученным из текущего ускорения транспортного средства, может быть интегрировано или накоплено с помощью следующей формулы:
D=D+(Iout-Iin)*d1,
где d1 представляет цикл вычисления.
Интеграл (или накопление) отклонения между индексами Iout и Iin, полученными таким образом, затем сравнивается с пороговым значением T начала уменьшения, вычисленным на этапе S2 (на этапе S5). В частности, на этапе S5, определяется то, превышает или нет интеграл (или накопление) отклонения D пороговое значение T начала уменьшения. Т.е. этап S5 является этапом для определения удовлетворения вышеуказанного "другого условия". В случае если ответом этапа S5 является "Да", сброс отклонения между индексами Iout и Iin выполняется (на этапе S6), и управляющий индекс Iout спортивности понижается (на этапе S7). Затем процедура возвращается. Как описано выше, пороговое значение T начала уменьшения определяется со ссылкой на карту, показанную на фиг.6. Следовательно, в случае, если транспортное средство управляется в спортивном стиле, т.е. в случае, если транспортное средство движется быстро и резко, текущее значение управляющего индекса Iout спортивности поддерживается или предотвращается его понижение, и его скорость Vd уменьшения уменьшается или придерживается равной "0". В этом случае, в частности, управляющий индекс Iout спортивности уменьшается на этапе S7 с использованием следующего уравнения:
Iout=Iout-Vd*d1
Наоборот, в случае, если интеграл (или накопление) отклонения D меньше порогового значения T начала уменьшения, так что ответом этапа S5 является "Нет", процедура возвращается. Т.е. интегрирование отклонения между индексами Iout и Iin продолжается.
Между тем, в случае, если ответом этапа S3 является "Да", т.е. в случае, если текущее значение мгновенного индекса Iin спортивности превышает поддерживаемый текущий управляющий индекс Iout спортивности, управляющий индекс Iout спортивности обновляется на основе текущего значения локального максимума мгновенного индекса Iin спортивности, и сброс интеграла (или накопления) отклонения D выполняется одновременно (на этапе S8). Процедура затем возвращается. Такое обновление управляющего индекса Iout спортивности выполняется, как пояснено со ссылкой на фиг.3.
Таким образом, фиг.5 показывает пример управления, чтобы равномерно выполнять временное интегрирование отклонения между индексами Iout и Iin, в случае, если значение мгновенного индекса Iin спортивности меньше поддерживаемого управляющего индекса Iout спортивности. Как описано выше, мгновенный индекс Iin спортивности или интервал отклонения между индексами Iout и Iin рассматриваются как средство, представляющее предпочтение или намерение при вождении водителя. Следовательно, чтобы отражать такое предпочтение или намерение водителя при управлении, чтобы более точно регулировать характеристики вождения транспортного средства, предпочтительно выполнять интегрирование отклонения между индексами Iout и Iin при взвешивании определенного или вычисленного мгновенного индекса Iin спортивности или взвешивании отклонения между индексами Iout и Iin. Пример такого управления показывается на фиг.8 и 9.
Фиг.8 является блок-схемой последовательности операций способа, поясняющей вышеописанный пример управления. В качестве примера управления, показанного на фиг.5, процедура, показанная на фиг.8, многократно выполняется с предварительно определенными короткими интервалами посредством включения главного переключателя или пускового переключателя, и данные, к примеру, управляющий индекс Iout спортивности, инициализируются посредством выключения любого из этих переключателей. Согласно управлению, показанному на фиг.8, прежде всего, мгновенный индекс Iin спортивности вычисляется (на этапе S11), как на вышеуказанном этапе S1 примера, показанного на фиг.5.
Затем пороговое значение T начала уменьшения, задающее время, чтобы начинать понижение поддерживаемого управляющего индекса Iout спортивности, и скорость Vd уменьшения (т.е. процентное отношение или градиент), чтобы понижать управляющий индекс Iout спортивности, вычисляются по отдельности (на этапе S12), как на вышеуказанном этапе S2 примера, показанного на фиг.5.
Затем определяется то, превышает или нет текущее значение мгновенного индекса Iin спортивности текущее значение управляющего индекса Iout спортивности (на этапе S13). В случае если ответом этапа S3 является "Нет", т.е. в случае, если значение мгновенного индекса Iin спортивности, полученное из текущего ускорения транспортного средства, меньше поддерживаемого текущего управляющего индекса Iout спортивности, выполняется оценка мгновенного индекса Iin спортивности, другими словами, оценка текущей спортивности транспортного средства (на этапе S14). В частности, на этапе S14 определяется то, меньше или нет отклонение между управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности предварительно определенного значения Ad критерия. Это значение Ad критерия задается равным относительно небольшому значению. Т.е. определение на этапе S14 выполняется для того, чтобы определять то, аппроксимируется или нет мгновенный индекс Iin спортивности к управляющему индексу Iout спортивности.
В случае если ответом этапа S14 является "Да", считается, что спортивность движущегося транспортного средства является аналогичной его текущим характеристикам вождения, устанавливаемым на основе управляющего индекса Iout спортивности. В этом случае, следовательно, необязательно понижать управляющий индекс Iout спортивности так, что сброс интеграла (или накопление) отклонения D выполняется (на этапе S15), и затем интегрирование отклонения между индексами Iout и Iin выполняется (на этапе S16). Наоборот, в случае, если отклонение между управляющим индексом Iout спортивности и мгновенным индексом Iin спортивности превышает предварительно определенное значение Ad критерия, так что ответом этапа S14 является "Нет", процедура напрямую переходит к этапу S16 при пропуске этапа S15, чтобы выполнять интегрирование отклонения между индексами Iout и Iin.
В частности, на этапе S16 отклонение между индексами Iout и Iin интегрируется при взвешивании разности между текущим мгновенным индексом Iin спортивности и текущим управляющим индексом Iout спортивности. Более конкретно, на этапе S16, разность между текущим мгновенным индексом Iin спортивности и текущим управляющим индексом Iout спортивности (Iout-Iin) умножается на предварительно определенное усиление g и на цикл d1 вычисления и прибавляется к интегралу отклонения D. Т.е. усиление g выступает в качестве весового коэффициента, и усиление g может быть определено заранее на основе параметров, представляющих операцию водителя, состояние дороги и т.д. Фиг.9 показывает пример карты для задания усиления g. Как показано на фиг.9, усиление g уменьшается согласно увеличению, по меньшей мере, одного из следующих коэффициентов, таких как степень Pa открытия акселератора, скорость ∆Pa изменения степени Pa открытия, нажатие Br педали тормоза, скорость ∆Br изменения нажатия Br педали тормоза, угол θ поворота колес и скорость ∆θ изменения угла θ поворота колес, значение текущего управляющего индекса Iout спортивности, вышеуказанная скорость Vd уменьшения, градиент δ дороги и т.д. Т.е. даже если текущий мгновенный индекс Iin спортивности меньше текущего управляющего индекса Iout спортивности, предотвращается увеличение интеграла отклонения D в качестве условия, чтобы понижать управляющий индекс Iout спортивности, в случае, если транспортное средство движется в состоянии, аналогичном характеристикам вождения, устанавливаемым на основе управляющего индекса Iout спортивности. В этом случае, следовательно, начало понижения управляющего индекса Iout спортивности относительно задерживается.
Интеграл (или накопление) отклонения D, полученного таким образом, затем сравнивается с пороговым значением T начала уменьшения, вычисленным на этапе S12 (на этапе S17). В частности, на этапе S17 определяется то, превышает или нет интеграл (или накопление) отклонения D пороговое значение T начала уменьшения. Т.е. этап S17 является этапом для определения удовлетворения вышеуказанного "другого условия". В случае если ответом этапа S17 является "Да", управляющий индекс Iout спортивности постепенно понижается на скорости Vd уменьшения, вычисленной на этапе S12 (на этапе S18). Таким образом, управление, аналогичное вышеуказанному этапу S7 на фиг.5, выполняется на этапе S18. В этом случае сброс интеграла отклонения D может быть выполнен.
В случае если интеграл (или накопление) отклонения D меньше порогового значения T начала уменьшения, так что ответом этапа S17 является "Нет", процедура возвращается. Т.е. интегрирование (или накопление) отклонения между индексами Iout и Iin продолжается.
Между тем, в случае, если ответом этапа S13 является "Да", т.е. в случае, если текущее значение мгновенного индекса Iin спортивности превышает поддерживаемый текущий управляющий индекс Iout спортивности, управляющий индекс Iout спортивности обновляется на основе текущего значения локального максимума мгновенного индекса Iin спортивности, и сброс интеграла (или накопления) отклонения D выполняется (на этапе S19). Процедура затем возвращается. Такое обновление управляющего индекса Iout спортивности выполняется, как пояснено со ссылкой на фиг.3.
Таким образом, согласно управлению, показанному на фиг.8, отклонение между мгновенным индексом Iin спортивности, изменяющимся мгновенно, и управляющим индексом Iout спортивности оценивается, и такая оценка используется в качестве условия, чтобы понижать мгновенный индекс Iin спортивности. Следовательно, согласно управлению, показанному на фиг.8, предпочтение или намерение водителя могут отражаться при управлении, чтобы более точно регулировать характеристики вождения транспортного средства.
Как описано выше, система управления транспортного средства согласно настоящему изобретению выполнена с возможностью определения индекса на основе ускорения, и характеристики вождения транспортного средства задаются на основе индекса. Как также описано, оба из фактического ускорения, определяемого посредством датчика ускорения, и оцененного (или целевого) ускорения, вычисленного на основе потребности приведения в движение, скорости транспортного средства, рабочей величины тормоза, угла поворота колес и т.д., могут быть использованы для того, чтобы получать вышеуказанный индекс. Альтернативно, также можно определять индекс на основе комбинации фактического ускорения и целевого ускорения. В случае использования обоих из фактического ускорения и целевого ускорения, чтобы определять индекс, индекс по отдельности получается на основе фактического ускорения и целевого ускорения. Индексы, полученные таким образом, сравниваются друг с другом, и один из этих индексов, возможных, чтобы задавать более спортивные характеристики вождения транспортного средства, используется в управлении, чтобы задавать характеристики вождения транспортного средства. В этом случае, например, фактический мгновенный индекс Iin спортивности определяется на основе фактического ускорения, и фактический управляющий индекс Iout спортивности определяется на основе фактического мгновенного индекса Iin спортивности. Между тем, целевой мгновенный индекс Iin спортивности определяется на основе целевого ускорения, и целевой управляющий индекс Iout спортивности определяется на основе целевого мгновенного индекса Iin спортивности. Затем один из больших индексов из фактического управляющего индекса Iout спортивности и целевого управляющего индекса Iout спортивности, полученных таким образом, используется для того, чтобы задавать характеристики вождения транспортного средства. Соотношение между управляющим индексом Iout спортивности и характеристиками вождения транспортного средства поясняется ниже.
Целевое ускорение может быть вычислено различными способами, и пример, чтобы вычислять целевое ускорение, поясняется ниже. Прежде всего, должно поясняться целевое ускорение в продольном направлении. Продольное ускорение транспортного средства может получаться на основе целевого ускорения и целевого замедления, и, например, целевое ускорение может быть вычислено на основе потребности приведения в движение, к примеру, степени открытия акселератора и скорости транспортного средства. С другой стороны, замедление устанавливается посредством операции торможения. Следовательно, целевое замедление может быть вычислено на основе давления главного тормозного цилиндра (M/C), обусловленного операцией тормоза (M/C-давление) и величиной нажатия педали тормоза. Корреляция этих коэффициентов показывается в блок-схеме по фиг.10.
Чтобы получать целевое ускорение (т.е. потребность в ускорении) на основе степени открытия акселератора и скорости транспортного средства, процедура вычисления, показанная на фиг.11, выполняется. Прежде всего, потребность Gx' в ускорении случая, в котором акселератор полностью закрывается (т.е. в случае, если степень Pa открытия=P0), определяется (на этапе S200), и потребность Gx' в ускорении этого случая может выражаться посредством следующей формулы:
Gx'(P0,v)=Gx0(v).
В частности, потребность Gx' в ускорении этого случая может быть вычислена со ссылкой на карту, подготовленную заранее.
Затем потребность Gx' в ускорении случая, в котором степень Pa открытия акселератора является предварительно определенным значением (Pa=P1), определяется (на этапе S201), и потребность Gx' в ускорении этого случая может выражаться посредством следующей формулы:
Gx'(P1,v)=Gx1(v).
В частности, потребность Gx' в ускорении этого случая может быть вычислена со ссылкой на карту, подготовленную заранее.
На основе потребностей Gx1(v) и Gx0(v) в ускорении, определенных таким образом, постоянная c(v), которая должна использоваться для того, чтобы вычислять потребность в ускорении в состоянии, в котором степень Pa открытия акселератора составляет "P0<Pa<P1" в требуемой дроби Вебера, вычисляется (на этапе S202) с помощью следующей формулы:
c(v)=(Gx1(v)-Gx0(v))/P1k,
где k представляет дробь Вебера или скорректированную дробь Вебера. Т.е. k представляет часть порогового значения решения относительно базового управляющего воздействия согласно закону Вебера, который гласит, что порог различимости между двумя управляющими воздействиями является пропорциональным абсолютной величине управляющих воздействий.
Затем получается степень Pa открытия акселератора (на этапе S203), и определяется то, превышает или нет полученная степень Pa открытия акселератора максимальную степень P2 открытия акселератора, к которой применяется закон Вебера (на этапе S204). В случае если ответом этапа S204 является "Нет", компенсация потребности в ускорении для максимального вывода выполняется (на этапе S205). Например, такая компенсация выполняется с помощью следующей формулы:
Gx'(P2)=c(v)P2k+Gx0(v).
Затем целевое ускорение Gx'(Pa) случая, в котором степень открытия акселератора является Pa, вычисляется с помощью следующей формулы:
Gx'(Pa)=[{(Gmax-Gx(P2))Pa}/(Pmax-P2)]+Gx(P2)
(на этапе S206).
Наоборот, в случае, если ответом этапа S204 является "Да", целевое ускорение Gx'(Pa) вычисляется с использованием закона Вебера-Фехнера (на этапе S207). В частности, целевое ускорение Gx'(Pa) этого случая вычисляется с помощью следующей формулы:
Gx'(Pa)=c(v) Pak+Gx0(v).
После вычисления на этапе S206 или S207 процедура возвращается к этапу S203, чтобы повторять режимы управления до этапа S206 или этапа S207, в то время как транспортное средство движется, или главный переключатель включается.
Между тем, целевое замедление может получаться на основе вышеуказанного M/C-давления, нажатия педали тормоза и т.д. В частности, целевое замедление может быть вычислено со ссылкой на карту, определяющую соотношение между целевым замедлением и этими параметрами. Примеры карт, подготовленных заранее на основе экспериментального результата или моделирования, показаны на фиг.12(a) и (b).
Примеры оцененного ускорения, которое может быть использовано в управлении настоящим изобретением, перечисляются следующим образом. Например, любое из следующих производных значений, к примеру, производное значение входной скорости трансмиссии (T/M) 13, производное значение выходной скорости трансмиссии (T/M) 13 и производное значение ведущего вала может быть использовано в качестве продольного ускорения. Альтернативно, продольное ускорение также может получаться на основе информации об изменении местоположения транспортного средства, собранной посредством GPS (глобальной системы определения местоположения).
Помимо этого, продольное ускорение Gx также может получаться на основе изменения в вертикальной нагрузке в продольном направлении. Например, при условии, что неровность дорожного покрытия отсутствует, продольное ускорение Gx переднего колеса может быть вычислено с помощью следующей формулы:
Gx=-((Fzfr-Fzfr0)+(Fzfl-Fzfl0))*(L/(M*H));
и продольное ускорение Gx заднего колеса может быть вычислено с помощью следующей формулы:
Gx=-((Fzrr-Fzrr0)+(Fzrl-Fzrl0))*(L/(M*H)),
где "M" представляет вес транспортного средства, "h" представляет высоту гравитационного центра, "L" представляет колесную базу, "Fz" представляет динамическую вертикальную нагрузку, "Fz0" представляет статическую вертикальную нагрузку, первый суффикс "r" представляет заднее колесо, первый суффикс "f" представляет переднее колесо, второй суффикс "r" представляет правое колесо, и второй суффикс "l" представляет левое колесо.
Между тем, поперечное ускорение Gy может получаться, по меньшей мере, из любого из изменения в вертикальной нагрузке, угле поворота колес, скорости рыскания и т.д. Например, при условии, что неровность дорожного покрытия отсутствует, поперечное ускорение Gy переднего колеса может быть вычислено с помощью следующей формулы:
Gy=((Fzfr-Fzfr0)-(Fzfl-Fzfl0))*(T/(2*M*h*Rsf));
и поперечное ускорение Gy заднего колеса может быть вычислено с помощью следующей формулы:
Gy=((Fzrr-Fzrr0)-(Fzrl-Fzrl0))*(T/(2*M*h*(1-Rsf))),
где "Rsf" представляет распределение боковой жесткости подвески, "M" представляет вес транспортного средства, "h" представляет высоту гравитационного центра, "T" представляет протектор, "Fz" представляет динамическую вертикальную нагрузку, "Fz0" представляет статическую вертикальную нагрузку, первый суффикс "r" представляет заднее колесо, первый суффикс "f" представляет переднее колесо, второй суффикс "r" представляет правое колесо, и второй суффикс "l" представляет левое колесо.
Альтернативно, поперечное ускорение Gy может быть вычислено на основе угла St поворота руля с помощью следующей формулы:
Gy=(St/nl)*{V2/(l+AV2)},
где "n" представляет соотношение рулевой передачи, "l" представляет колесную базу, "A" представляет коэффициент устойчивости, и "V" представляет скорость транспортного средства.
Помимо этого, поперечное ускорение Gy также может получаться из скорости Yr рыскания. В этом случае поперечное ускорение Gy может выражаться посредством следующего выражения:
Gy=Yr*В.
Следовательно, поперечное ускорение Gy может вычисляться посредством определения скорости Yr рыскания посредством датчика и подстановки определенного значения в вышеприведенную формулу. Как описано выше, информация местоположения транспортного средства может получаться из GPS. Следовательно, также можно получать поперечное ускорение Gy с использованием GPS, как в случае вычисления продольного ускорения Gx.
Таким образом, мгновенный индекс Iin спортивности вычисляется на основе вышеуказанного фактического ускорения или оцененного ускорения. Как описано выше, управляющий индекс Iout спортивности определяется на основе мгновенного индекса Iin спортивности. Управляющий индекс Iout спортивности, определенный таким образом, представляет состояние движения транспортного средства, и состояние движения транспортного средства включает в себя окружение движения, к примеру, градиент дороги, наличие перекрестка, кривизну перекрестка и т.д., и предпочтения при вождении водителя. Т.е. ускорение транспортного средства изменяется в зависимости от состояния дороги, и ускорение транспортного средства также изменяется посредством операции ускорения и замедления от водителя, выполняемой в соответствии с состоянием дороги. Следовательно, система управления транспортного средства согласно настоящему изобретению выполнена с возможностью использовать управляющий индекс Iout спортивности в управлении, чтобы регулировать характеристики вождения транспортного средства. В частности, согласно настоящему изобретению, характеристики вождения транспортного средства включают в себя характеристики ускорения, рулевого управления, подвески, звука и т.д. Эти характеристики задаются произвольно посредством изменения характеристик дроссельного клапана 10, трансмиссии 13, амортизатора 5 подвески 4, усиливающего механизма 18 и т.д. посредством актуаторов этих устройств. По существу, спортивность транспортного средства повышается согласно увеличению управляющего индекса Iout спортивности.
Здесь поясняется пример, чтобы изменять характеристики вождения транспортного средства, посредством изменения ускорения транспортного средства согласно управляющему индексу Iout спортивности. В этом случае максимальная требуемая величина ускорения получается в соответствии с управляющим индексом Iout спортивности, и пример, чтобы получать максимальную требуемую величину ускорения, показывается на фиг.13. В частности, максимальная требуемая величина ускорения представляет доступную величину движущей силы транспортного средства. Например, в случае, если максимальная требуемая величина ускорения составляет 100%, транспортное средство находится в таком состоянии, что оно формирует максимальное ускорение. В этом случае, между тем, трансмиссия 13 находится в таком состоянии, что она задает передаточное число так, что оно повышает частоту вращения двигателя до максимальной частоты, или задает наибольшее передаточное число (т.е. передаточное число стороны самой низкой скорости). В случае, если максимальная требуемая величина ускорения составляет 50%, транспортное средство находится в таком состоянии, что оно формирует половину доступного ускорения, и трансмиссия 13 находится в таком состоянии, что она задает частоту изменения промежуточной скорости. Как указано в примере, показанном на фиг.13, максимальная требуемая величина ускорения увеличивается согласно увеличению управляющего индекса Iout спортивности. На фиг.13 базовая характеристика транспортного средства указывается посредством сплошной линии. Базовая характеристика транспортного средства, указанная на фиг.13 получена посредством вычисления соотношения между управляющим индексом Iout спортивности и максимальной требуемой величиной ускорения на основе данных, полученных из теста в ходе вождения транспортного средства, при выполнении надлежащих модификаций на основе теста в ходе вождения и моделирования вождения транспортного средства. В случае задания характеристической линии в области, в которой максимальная требуемая величина ускорения выше базовых характеристик, ускорение транспортного средства увеличивается относительно. Следовательно, в этом случае ускорение транспортного средства увеличивается, так что спортивность характеристик вождения повышается. Наоборот, в случае задания характеристической линии в области, в которой максимальная требуемая величина ускорения ниже базовых характеристик, ускорение транспортного средства снижается относительно. Следовательно, в этом случае характеристики вождения и ускорение транспортного средства сдерживаются в определенных рамках, так что комфорт во время езды транспортного средства повышается. Такое регулирование (т.е. адаптация или настройка) может выполняться в зависимости от требуемого отличительного признака транспортного средства в качестве товара. Помимо этого, чтобы исключать диапазон чрезвычайно низких скоростей из управления, чтобы задавать или регулировать характеристики вождения транспортного средства, например, чтобы исключать случаи, когда транспортное средство попадает в пробку или когда транспортное средство въезжает задним ходом в гараж, из вышеуказанного управления, базовая характеристика задается таким образом, что она обнуляет максимальную требуемую величину ускорения в случае, когда управляющий индекс Iout спортивности превышает нуль.
Здесь поясняется пример управления, чтобы изменять ускорение транспортного средства, при отражении вышеописанной максимальной требуемой величины ускорения в характеристиках переключения передач трансмиссии 13. В транспортном средстве с использованием бесступенчатой трансмиссии в качестве трансмиссии 13 или в гибридном транспортном средстве, выполненном с возможностью управлять частотой вращения двигателя посредством электромотора, целевая выходная мощность вычисляется на основе скорости транспортного средства и потребности приведения в движение, и частота вращения двигателя управляется, чтобы выводить целевую выходную мощность. Фиг.14 показывает соотношение между скоростью транспортного средства и ускорением относительно потребности в скорости, и максимальная требуемая величина ускорения, полученная на основе управляющего индекса Iout спортивности со ссылкой на фиг.13, добавляется на фиг.14. В частности, жирная линия, представляющая максимальную требуемую величину ускорения 100%, и жирная линия, представляющая максимальную требуемую величину ускорения 50%, добавляются на фиг.14. Соответственно, на фиг.14 требуемая скорость указывается на пересечении линии, представляющей максимальную требуемую величину ускорения, и линии, представляющей текущую скорость транспортного средства.
Чтобы управлять передаточным числом, заданным посредством трансмиссии 13, транспортное средство, имеющее трансмиссию 13, как пояснено со ссылкой на фиг.24, содержит базовую карту переключения передач. Например, в случае, если трансмиссия 13 является бесступенчатой трансмиссией, передаточное число задается со ссылкой на карту, на которой передаточное число определяется в соответствии со скоростью транспортного средства и частотой вращения двигателя. В общем, такое управление переключением скорости известно как управление потребностью в крутящем моменте. Согласно управлению потребностью в крутящем моменте, прежде всего, потребность приведения в движение получается со ссылкой на карту движущей силы, на которой движущая сила определяется на основе степени открытия акселератора и скорости транспортного средства, и выходная потребность двигателя получается на основе потребности приведения в движение, полученной таким образом, и скорости транспортного средства или частоты вращения двигателя. Затем целевая частота вращения двигателя, чтобы выводить требуемую выходную мощность двигателя при оптимальной экономии топлива, получается со ссылкой на карту частоты вращения двигателя, и передаточное число бесступенчатой трансмиссии управляется так, что оно достигает целевой частоты вращения двигателя. Т.е. в этом случае трансмиссия 13 используется в качестве механизма переключения передач для управления частотой вращения двигателя, выступающего в качестве основного движителя. Здесь выходная мощность двигателя получается посредством умножения крутящего момента и скорости. Следовательно, крутящий момент двигателя, чтобы достигать выходной потребности, получается на основе целевой частоты вращения двигателя или скорости транспортного средства, соответствующей ему, и вычисляется степень открытия дроссельного клапана, чтобы достигать крутящего момента двигателя.
В частности, средство B31 управления скоростью в спортивном режиме, показанное на фиг.14, выступает в качестве средства вычисления скорости в спортивном режиме для вывода потребности в скорости, полученной на основе управляющего индекса Iout спортивности. Между тем, средство B32 управления скоростью в нормальном режиме выступает в качестве средства вычисления нормальной скорости для вывода целевой скорости, полученной посредством управления частотой вращения двигателя в нормальном режиме, такого как вышеуказанное управление потребностью в крутящем моменте. Эта скорость в нормальном режиме и скорость в спортивном режиме, вычисленные таким образом, сравниваются (т.е. регулируются) посредством средства B33 регулирования скорости, и выбирается более высокая скорость. Т.е. выбор максимума выполняется посредством средства B33 регулирования скорости. Выбранная скорость выводится посредством средства B34 управления конечной скоростью в форме управляющего сигнала. Следовательно, в случае, если степень открытия акселератора является небольшой, так что скорость в нормальном режиме ниже скорости в спортивном режиме, поддерживается скорость в спортивном режиме. Между тем, в случае, если педаль акселератора нажимается глубоко, так что потребность приведения в движение увеличивается, чтобы превышать максимальную требуемую величину ускорения, выполняется переключение коробки передач на более низкую передачу.
Т.е. вышеописанное управление является управлением переключением скорости бесступенчатой трансмиссии, чтобы задавать передаточное число со стороны более низкой передачи (т.е. задавать большое передаточное число). Как результат такого увеличения передаточного числа, максимальная движущая сила или тормозная сила двигателя увеличивается, так что транспортное средство может управляться быстро и резко. Т.е. характеристики вождения транспортного средства могут регулироваться так, что они повышают спортивность согласно предпочтению при вождении водителя, или согласно окружению движения, к примеру, состоянию дороги. Например, вышеописанное управление транспортным средством, имеющим бесступенчатую трансмиссию, может быть выполнено в случае, если транспортное средство содержит переключатель выбора режима, и спортивный режим выбирается посредством переключателя выбора режима.
Между тем, в случае, если трансмиссия 13 является трансмиссией с зубчатой передачей, управление, показанное на фиг.15, выполняется. В случае выполнения управления переключением передач трансмиссии с зубчатой передачей целевая ступень коробки переключения передач определяется, и управляющий сигнал выводится в актуатор трансмиссии 13, чтобы задавать целевую ступень коробки переключения передач. Соотношения между скоростью транспортного средства и ускорением на каждой ступени коробки переключения передач являются такими, как показано на фиг.15. На фиг.15 жирная линия, представляющая максимальную требуемую величину ускорения 100%, и жирная линия, представляющая максимальную требуемую величину ускорения 50%, полученные на основе управляющего индекса Iout спортивности, также добавляются. В этом случае, следовательно, ступень коробки переключения передач, ближайшая к пересечению между линией, представляющей максимальную требуемую величину ускорения, полученную на основе управляющего индекса Iout спортивности, и линией, представляющей текущую скорость транспортного средства, определяется в качестве целевой ступени коробки переключения передач.
В случае, если система управления транспортного средства настоящего изобретения выполняет управление, целевая ступень коробки переключения передач в спортивном режиме, определенная со ссылкой на фиг.15, и целевая ступень коробки переключения передач в нормальном режиме (например, передаточное число, определенное на основе операции ускорения и скорости транспортного средства), сравниваются (т.е. регулируются), и ступень коробки переключения передач со стороны низкой скорости, на которой передаточное число превышает передаточное число другой ступени коробки переключения передач, выбирается. Т.е. выбор минимума выполняется. Как результат, передаточное число увеличивается, тем самым увеличивая максимальную движущую силу или тормозную силу двигателя. Следовательно, в этом случае также транспортное средство может управляться быстро и резко. В частности, целевая ступень коробки переключения передач в нормальном режиме определяется со ссылкой на схему переключения передач (т.е. карту переключения передач), на которой область каждой ступени коробки переключения передач задается на основе потребности приведения в движение, к примеру, степени открытия акселератора и скорости транспортного средства. Например, переключение коробки передач на более низкую передачу выполняется в случае, если педаль акселератора нажимается глубоко, так что потребность приведения в движение увеличивается, чтобы превышать максимальную требуемую величину ускорения, и выполнение переключения коробки передач на более высокую передачу разрешается, когда скорость транспортного средства дополнительно увеличивается.
В частности, средство B41 управления ступенью коробки переключения передач в спортивном режиме, показанное на фиг.15, выполнено с возможностью выводить ступень коробки переключения передач, определенную на основе управляющего индекса Iout спортивности. Между тем, средство B42 управления ступенью коробки переключения передач в нормальном режиме выполнено с возможностью выводить ступень коробки переключения передач, определенную со ссылкой на схему переключения передач в нормальном режиме, на которой ступени коробки переключения передач задаются на основе степени открытия акселератора и скорости транспортного средства. Эта ступень коробки переключения передач в нормальном режиме и ступень коробки переключения передач в спортивном режиме, определенные таким образом, сравниваются (т.е. регулируются) посредством средства B43 регулирования ступени коробки переключения передач, и ступень коробки переключения передач со стороны низкой скорости (на которой передаточное число больше) выбирается. Т.е. выбор минимума выполняется посредством средства B43 регулирования ступени коробки переключения передач. Ступень коробки переключения передач, выбранная таким образом, выводится посредством средства B44 управления конечной ступенью коробки переключения передач в форме управляющего сигнала. Таким образом, трансмиссия 13 используется в качестве механизма переключения передач для управления частотой вращения двигателя, выступающего в качестве основного движителя. Следовательно, в случае, если ступень коробки переключения передач в нормальном режиме выше ступени коробки переключения передач в спортивном режиме в зависимости от степени открытия акселератора, ступень коробки переключения передач в спортивном режиме поддерживается, тем самым сохраняя ступень коробки переключения передач на стороне низкой скорости (чтобы сохранять большее передаточное число).
Т.е. вышеописанное управление является управлением переключением передач трансмиссии с зубчатой передачей, чтобы задавать ступень коробки переключения передач со стороны низкой скорости (т.е. задавать большое передаточное число). Как результат такого увеличения передаточного числа, максимальная движущая сила или тормозная сила двигателя увеличивается, так что транспортное средство может управляться быстро и резко. Т.е. спортивность характеристик вождения может повышаться согласно предпочтению при вождении водителя или согласно окружению движения, к примеру, состоянию дороги. Например, выполнение вышеописанного управления может разрешаться в случае, если спортивный режим выбирается посредством переключателя выбора режима, и не допускаться в случае, если спортивный режим не выбирается посредством переключателя выбора режима.
Здесь функциональное средство, показанное на фиг.14 и 15, может быть установлено в вышеуказанном электронном модуле 28 управления. Альтернативно, это функциональное средство, показанное на фиг.14 и 15, может быть установлено в другом электронном модуле управления, специально предназначенном для того, чтобы выполнять управление в спортивном режиме.
Далее, здесь поясняется управление, выполняемое посредством системы управления транспортного средства настоящего изобретения для изменения характеристик вождения транспортного средства, имеющего двигатель, выступающий в качестве основного движителя, и трансмиссию с зубчатой передачей при коррекции ступени коробки переключения передач и движущей силы. Фиг.16 является блок-схемой, показывающей базовый пример определения целевой ступени коробки переключения передач и целевого крутящего момента двигателя на основе потребности приведения в движение. Как показано на фиг.16, прежде всего, потребность приведения в движение вычисляется на основе скорости транспортного средства и степени открытия акселератора (на этапе B1). В частности, потребность приведения в движение определяется на основе веса транспортного средства, выходных рабочих характеристик транспортного средства и т.д. Следовательно, на этапе B1 потребность приведения в движение вычисляется со ссылкой на карту, подготовленную заранее, на которой потребность приведения в движение определяется в соответствии со скоростью транспортного средства и степенью открытия акселератора. Затем ступень коробки переключения передач вычисляется на основе вычисленной потребности приведения в движение (на этапе B2). В частности, операция переключения передач трансмиссии с зубчатой передачей выполняется со ссылкой на схему переключения передач, на которой области каждой ступени коробки переключения передач или линия переключения коробки передач на более высокую передачу и линия переключения коробки передач на более низкую передачу определяются с использованием степени открытия акселератора и скорости транспортного средства в качестве параметров. Следовательно, вычисление на этапе B2 выполняется со ссылкой на схему переключения передач, сконфигурированной таким образом. Целевая ступень коробки переключения передач, вычисленная таким образом, передается в модуль управления трансмиссией (ECT) в форме сигнала команды управления (на этапе B3), и операция переключения передач выполняется. В этом случае, если блокировочная муфта (LU) размещается в тракте передачи энергии транспортного средства 1, приведение в действие блокировочной муфты определяется со ссылкой на карту, подготовленную заранее, и сигнал команды управления для зацепления или расцепления блокировочной муфты также выводится.
Между тем, целевой крутящий момент двигателя вычисляется на основе потребности приведения в движение, вычисленной на этапе B1, и фактической ступени коробки переключения передач трансмиссии 13 (на этапе B4). В частности, частота вращения двигателя определяется на основе ступени коробки переключения передач и скорости транспортного средства, поэтому целевой крутящий момент двигателя может быть вычислен на основе частоты вращения двигателя и потребности приведения в движение. Затем двигатель (ENG) 8 управляется, чтобы формировать крутящий момент двигателя, вычисленный таким образом (на этапе B5). В частности, управляется степень открытия дроссельного клапана.
Как описано выше, согласно системе управления транспортного средства настоящего изобретения, управляющий индекс Iout спортивности изменяется на основе мгновенного индекса Iin спортивности, полученного из продольного ускорения Gx, поперечного ускорения Gy или синтезированного ускорения из этих ускорений, и максимальная требуемая величина ускорения изменяется согласно изменению в управляющем индексе Iout спортивности. Как пояснено со ссылкой на фиг.15, максимальная требуемая величина ускорения отражается в управлении переключением передач, и если ступень коробки переключения передач, определенная на основе управляющего индекса Iout спортивности, ниже ступени коробки переключения передач нормального режима, более низкая ступень коробки переключения передач определяется в качестве конечной ступени коробки переключения передач. Между тем, базовый пример, поясненный со ссылкой на фиг.16, выполнен с возможностью осуществлять операцию переключения передач в нормальном режиме.
Следовательно, если конечная ступень коробки переключения передач, определенная на основе управляющего индекса Iout спортивности, является ступенью коробки переключения передач со стороны низкой скорости, конечная ступень коробки переключения передач, определенная таким образом, вводится на вышеуказанном этапе B2, чтобы использоваться в качестве целевой ступени коробки переключения передач. Как результат, передаточное число увеличивается, тем самым увеличивая максимальную движущую силу или тормозную силу двигателя. Следовательно, транспортное средство может управляться быстро и резко, т.е. спортивность характеристик вождения может повышаться согласно предпочтению при вождении водителя или согласно окружению движения, к примеру, состоянию дороги.
Альтернативно, ускорение транспортного средства также может регулироваться на основе управляющего индекса Iout спортивности посредством регулирования выходной мощности двигателя 8. В этом случае скорректированная движущая сила вводится на этапе B1, и потребность приведения в движение, вычисленная посредством базового управления, изменяется на основе скорректированной движущей силы. Здесь скорректированная движущая сила определяется на основе управляющего индекса Iout спортивности. С этой целью данные собираются посредством выполнения теста в ходе вождения или моделирования на основе намерения водителя, и собранные данные используются для того, чтобы подготавливать карту, определяющую соотношение между управляющим индексом Iout спортивности и скорректированной движущей силой. Следовательно, скорректированная движущая сила также может получаться на основе управляющего индекса Iout спортивности, полученного при вождении транспортного средства, и карты скорректированной движущей силы, подготовленной таким образом.
Фиг.17 является блок-схемой, показывающей пример, чтобы определять ступень коробки переключения передач параллельно с потребностью приведения в движение на основе скорости транспортного средства и степени открытия акселератора. Как описано выше, ступень коробки переключения передач трансмиссии с зубчатой передачей управляется со ссылкой на схему переключения передач, на которой ступени коробки переключения передач или линия переключения коробки передач на более высокую передачу и линия переключения коробки передач на более низкую передачу определяются на основе степени открытия акселератора и скорости транспортного средства. Следовательно, прежде всего, ступень коробки переключения передач вычисляется на основе скорости транспортного средства и степени открытия акселератора (на этапе B12), и одновременно, потребность приведения в движение вычисляется также на основе скорости транспортного средства и степени открытия акселератора (на этапе B11). Т.е. вычисление движущей силы, выполняемое на этапе B11, является идентичным вычислению, выполняемому на этапе B1 примера, показанного на фиг.16.
Целевая ступень коробки переключения передач, вычисленная таким образом на этапе B12, передается в модуль управления трансмиссией (ECT), и операция переключения передач трансмиссии 13 выполняется (на этапе B13). В этом случае, если блокировочная муфта (LU) размещается в тракте передачи энергии транспортного средства 1, приведение в действие блокировочной муфты определяется со ссылкой на карту, подготовленную заранее, и сигнал команды управления для зацепления или расцепления блокировочной муфты также выводится.
Между тем, целевой крутящий момент двигателя вычисляется на основе потребности приведения в движение, вычисленной на этапе B11, и фактическая ступень коробки переключения передач трансмиссии 13 (на этапе B14) и двигателя (ENG) 8 управляется, чтобы формировать крутящий момент двигателя, вычисленный таким образом (на этапе B15). Таким образом, управление, выполняемое на этапе B14, является идентичным управлению, выполняемому на этапе B4 на фиг.16, и управление, выполняемое на этапе B15, является идентичным управлению, выполняемому на этапе B5 на фиг.16.
Согласно примеру, показанному на фиг.17, если конечная ступень коробки переключения передач, определенная на основе управляющего индекса Iout спортивности, является ступенью коробки переключения передач со стороны низкой скорости, конечная ступень коробки переключения передач, определенная таким образом, также вводится на вышеуказанном этапе B12, чтобы использоваться в качестве целевой ступени коробки переключения передач. Как результат, относительно большое передаточное число устанавливается, и ускорение транспортного средства тем самым повышается. В этом случае скорректированная движущая сила, определенная на основе управляющего индекса Iout спортивности, также вводится на этапе B11, и потребность приведения в движение, вычисленная посредством базового управления, изменяется на основе скорректированной движущей силы.
Фиг.18 является блок-схемой, показывающей пример, чтобы управлять трансмиссией 13 и двигателем 8 отдельно на основе скорости транспортного средства и степени открытия акселератора. В этом случае, прежде всего, ступень коробки переключения передач вычисляется на основе скорости транспортного средства и степени открытия акселератора (на этапе B22). Целевая ступень коробки переключения передач, вычисленная таким образом на этапе B22, передается в модуль управления трансмиссией (ECT), и операция переключения передач трансмиссии 13 выполняется (на этапе B23). Эти режимы управления являются идентичными режимам управления, выполняемым на этапах B12 и B13 примера, показанного на фиг.17. С другой стороны, степень открытия дроссельного клапана вычисляется на основе степени открытия акселератора (на этапе B24), и затем двигатель 8 управляется на основе целевой степени открытия дроссельного клапана, вычисленной таким образом (на этапе B25). В случае, если дроссельный клапан является электронным дроссельным клапаном, соотношение между степенью открытия акселератора и целевой степенью открытия дроссельного клапана задается, по существу, нелинейно. В частности, в случае, если степень открытия акселератора является относительно небольшой, величина изменения в степени открытия дроссельного клапана относительно величины изменения в степени открытия акселератора является относительно небольшой. Наоборот, в случае, если степень открытия акселератора является относительно большой, соотношение между величиной изменения в степени открытия акселератора и величиной изменения в степени открытия дроссельного клапана становится приблизительно "один-к-одному".
Согласно примеру, показанному на фиг.18, если конечная ступень коробки переключения передач, определенная на основе управляющего индекса Iout спортивности, является ступенью коробки переключения передач со стороны низкой скорости, конечная ступень коробки переключения передач, определенная таким образом, также вводится на вышеуказанном этапе B22, чтобы использоваться в качестве целевой ступени коробки переключения передач. Как результат, относительно большое передаточное число устанавливается, и ускорение транспортного средства тем самым повышается. В этом случае скорректированная степень открытия дроссельного клапана, определенная на основе управляющего индекса Iout спортивности, вводится на этапе B24, и целевая степень открытия дроссельного клапана, полученная посредством вышеуказанного базового примера, изменяется на основе скорректированной степени открытия дроссельного клапана. Т.е. выходная характеристика основного движителя относительно операции акселератора также может быть изменена (чтобы увеличивать вывод) в случае, если управляющий индекс Iout спортивности увеличивается.
Как описано выше, синтезированное ускорение транспортного средства увеличивается согласно намерению водителя, например, синтезированное ускорение увеличивается в случае, если педаль 12 акселератора нажимается, чтобы ускорять транспортное средство, в случае, если педаль 7 тормоза нажимается, чтобы замедлять транспортное средство, или в случае, если руль 16 вращается, чтобы поворачивать транспортное средство. Согласно системе управления транспортного средства настоящего изобретения, управляющий индекс Iout спортивности сразу увеличивается в соответствии с увеличением синтезированного ускорения. Как результат, доступная величина движущей силы увеличивается согласно увеличению управляющего индекса Iout спортивности, и требуемое ускорение тем самым сразу формируется. Следовательно, спортивность характеристик вождения транспортного средства повышается. Помимо этого, вышеуказанные операции водителя, по существу, выполняются в зависимости от окружения движения, к примеру, градиента дороги. Следовательно, намерение водителя и окружение движения отражаются при управлении, чтобы регулировать характеристики вождения транспортного средства.
Помимо вышеизложенного, в случае, если управляющий индекс Iout спортивности поддерживается равным предварительно определенному значению, сведения по операциям ускорения, замедления и рулевого управления водителя, текущая спортивность, скорость транспортного средства, градиент дороги и т.д. отражаются в поддерживаемом управляющем индексе Iout спортивности. Например, в случае, если педаль акселератора нажимается глубоко или резко, управляющий индекс Iout спортивности поддерживается существенным в течение длительного периода времени, так что не допускается уменьшение спортивности транспортного средства. Как результат, предотвращается выполнение переключения коробки передач на более высокую передачу, даже если скорость транспортного средства увеличивается после нажатия педали акселератора, чтобы преодолевать подъем. Следовательно, уменьшение ускорения, являющееся результатом понижения крутящего момента приведения в движение или крутящего момента двигателя, может предотвращаться. Между тем, управляющий индекс Iout спортивности поддерживается существенным в течение длительного периода времени также в случае, если операция торможения, включающая в себя торможение двигателем, выполняется в случае, когда транспортное средство едет на спуске. Следовательно, в этом случае уменьшение тормозной силы двигателя может предотвращаться, тем самым предотвращая выполнение переключения коробки передач на более высокую передачу. Наоборот, даже если операция торможения выполняется чрезмерно или ошибочно в чрезвычайной ситуации, управляющий индекс Iout спортивности поддерживается, так что переключение коробки передач на более низкую передачу не выполняется в большей степени, чем требуется. В этом случае, следовательно, можно не допускать чрезмерного повышения частоты вращения двигателя 8. Помимо этого, в случае управления скоростью транспортного средства посредством практически одновременного нажатия обеих из педали акселератора и педали тормоза сформированное ускорение может подавляться при усилении тормозной силы. Дополнительно, в случае вращения руля 16, управляющий индекс Iout спортивности также поддерживается существенным в течение длительного периода времени. Следовательно, уменьшение ускорения, являющееся результатом выполнения переключения коробки передач на более высокую передачу во время операции поворота или понижения частоты вращения двигателя, может предотвращаться. В этом случае, следовательно, может предотвращаться ухудшение управляемости при операции поворота.
Помимо вышеизложенного, например, в случае, если транспортное средство преодолевает подъем против силы тяжести, датчик ускорения выводит значение определения ускорения, превышающее значение фактического ускорения. В этом случае, следовательно, мгновенный индекс Iin спортивности повышается до более высокого значения, чем значение случая, когда транспортное средство управляется на ровной дороге. Как результат, управляющий индекс Iout спортивности задается равным более высокому значению, так что характеристики вождения транспортного средства изменяются таким образом, что они повышают ускорение. Таким образом, в случае, если транспортное средство преодолевает подъем, согласно настоящему изобретению, относительно большая движущая сила может быть сформирована. Наоборот, в случае, если транспортное средство едет на спуске, датчик ускорения выводит значение определения ускорения, меньшее значения фактического ускорения. В этом случае, следовательно, мгновенный индекс Iin спортивности понижается до относительно меньшего значения. Тем не менее, если операция торможения выполняется для того, чтобы подавлять скорость транспортного средства, когда транспортное средство едет на спуске, гравитационное ускорение добавляется к ускорению во время операции торможения. Как результат, значение определения датчика ускорения становится относительно большим, и мгновенный индекс Iin спортивности тем самым повышается. В этом случае, следовательно, относительно большая тормозная сила двигателя может устанавливаться. Таким образом, согласно системе управления транспортного средства настоящего изобретения, сложности операции ускорения, чтобы преодолевать подъем, и операции замедления, чтобы ехать на спуске, могут исключаться или смягчаться, так что маневренность транспортного средства может быть дополнительно повышена. Помимо этого, сложности традиционного управления спусками или управления подъемами для недопущения или ограничения, чтобы задавать передаточное число со стороны высокой скорости, также могут исключаться или смягчаться.
Как описано выше, степень или варьирование ускорения и расхождение между ожидаемым ощущением при вождении водителя и фактическим поведением транспортного средства отличаются в зависимости от направления ускорения. Следовательно, система управления транспортного средства настоящего изобретения выполнена с возможностью изменять характеристики вождения транспортного средства на основе синтезированного ускорения из множества ускорений в различных направлениях. С этой целью, в частности, система управления транспортного средства настоящего изобретения выполнена с возможностью изменять степень изменения характеристик вождения транспортного средства (т.е. степень отражения предпочтения водителя при управлении, чтобы изменять характеристики вождения транспортного средства) в зависимости от направления ускорения. Следовательно, характеристики вождения транспортного средства могут точно регулироваться на основе синтезированного ускорения.
Более конкретно, как описано в вышеописанных примерах, мгновенный индекс Iin спортивности увеличивается согласно ускорению в любом из направлений, в то время как транспортное средство движется. С другой стороны, задерживается понижение управляющего индекса Iout спортивности относительно понижения мгновенного индекса Iin спортивности. Следовательно, также можно увеличивать управляющий индекс Iout спортивности и максимальную требуемую величину ускорения на основе управляющего индекса Iout спортивности согласно истекшему времени или пройденному расстоянию от запуска транспортного средства.
Здесь передаточное число не является единственным фактором, который влияет или определяет характеристики вождения транспортного средства. Например, характеристики вождения транспортного средства также находятся под влиянием следующих факторов, таких как: выходная характеристика крутящего момента двигателя, обусловленная соотношением между выходной мощностью двигателя и рабочей величиной акселератора; характеристика рулевого управления, обусловленная соотношением между углом поворота колес или силой поворота колес и фактическим углом переднего колеса; характеристика демпфирования вибрации подвески 4, обусловленная жесткостью пружины; маневренность (т.е. характеристики поворачиваемости), обусловленная коэффициентом распределения крутящего момента на передние и задние колеса полноприводного транспортного средства и т.д. Следовательно, согласно настоящему изобретению, система управления транспортного средства также допускает изменение вышеприведенных характеристик на основе индекса, полученного из ускорения. В частности, реакция двигателя 8, чтобы выводить мощность, т.е. скорость увеличения степени открытия дроссельного клапана, усиливающего крутящего момента усиливающего механизма, относящихся к так называемому "прямому ощущению", передаточного отношения механизма 15 рулевого управления, коэффициента распределения крутящего момента на заднее колесо, относящихся к маневренности, корректируются согласно управляющему индексу Iout спортивности. В частности, эти коэффициенты могут быть скорректированы посредством управления выводами актуаторов этих механизмов.
Таким образом, система управления транспортного средства согласно настоящему изобретению может быть использована не только для того, чтобы управлять характеристиками ускорения и мощности транспортного средства, но также и управлять характеристиками рулевого управления и подвески транспортного средства. Фиг.19 является блок-схемой, поясняющей управление, чтобы изменять характеристику рулевого управления на основе управляющего индекса Iout спортивности, и на фиг.19 схематично показывается механизм электроусилителя руля (сокращенно EPS), содержащий рулевую передачу с переменным передаточным отношением (сокращенно VGRS-передачу). Как показано на фиг.19, чтобы возвратно-поступательно перемещать рейку 30 в направлении ширины (т.е. в поперечном направлении) посредством силы поворота колес, шестерня модуля 31 VGRS-передачи зацепляется с рейкой 30, и модуль 31 VGRS-передачи содержит VGRS-актуатор 32 для варьирования его передаточного отношения. Помимо этого, чтобы способствовать возвратно-поступательному движению рейки 30 в поперечном направлении, механизм электроусилителя руля содержит электромотор 33 с зубчатой передачей EPS. Между тем, ЭМУ содержит: модуль 34 вычисления передаточного отношения, выполненный с возможностью изменять передаточное отношение модуля 31 VGRS-передачи посредством вывода сигнала команды управления в VGRS-актуатор 32; и модуль 35 вычисления усиливающего крутящего момента, выполненный с возможностью вычислять требуемый крутящий момент электромотора 33 с зубчатой передачей EPS (т.е. осевое давление, которое должно применяться к рейке 30) и выводить вычисленный крутящий момент в VGRS-актуатор 32 в форме сигнала команды управления. Здесь традиционный механизм электроусилителя руля и модули вычисления могут быть использованы в этом примере.
Как показано на фиг.19, данные о скорости транспортного средства, угле поворота колес и крутящем моменте поворота колес вводятся в данные модули 34 и 35 вычисления, и эти данные могут определяться посредством датчиков. Помимо этого, скорректированное передаточное отношение вводится в модуль 34 вычисления передаточного отношения. В частности, скорректированное передаточное отношение используется для того, чтобы корректировать сигнал команды управления, который должен быть передан в VGRS-актуатор 32, согласно управляющему индексу Iout спортивности. С этой целью карта, на которой соотношение между скорректированным передаточным отношением и индексом Iout спортивности определяется согласно потребности, подготавливается заранее, и скорректированное передаточное отношение определяется со ссылкой на карту, подготовленную таким образом.
Между тем, в дополнение к данным о скорости транспортного средства, угле поворота колес и крутящем моменте поворота колес, скорректированный усиливающий крутящий момент вводится в модуль 35 вычисления усиливающего крутящего момента. В частности, усиливающий крутящий момент используется для того, чтобы корректировать сигнал команды управления, который должен быть передан в электромотор 33 с зубчатой передачей EPS, согласно управляющему индексу Iout спортивности. С этой целью карта, на которой соотношение между скорректированным усиливающим крутящим моментом и управляющим индексом Iout спортивности определяется согласно потребности, подготавливается заранее, и скорректированный усиливающий крутящий момент определяется со ссылкой на карту, подготовленную таким образом.
Таким образом, согласно примеру, показанному на фиг.19, передаточное отношение модуля 31 VGRS-передачи и крутящий момент для повышения силы поворота колес варьируются согласно изменению в управляющем индексе Iout спортивности, определенному на основе ускорения транспортного средства.
Фиг.20 является блок-схемой, поясняющей управление, чтобы изменять характеристику подвески на основе управляющего индекса Iout спортивности. В частности, согласно управлению, показанному на фиг.20, высота транспортного средства, достигаемая посредством (не показана) подвески, и коэффициент демпфирования вибрации и жесткость пружины подвески управляются на основе управляющего индекса Iout спортивности. Чтобы вычислять целевые значения высоты транспортного средства, коэффициента демпфирования вибрации и жесткости пружины, предоставляется модуль 40 вычисления. В частности, модуль 40 вычисления состоит, главным образом, из микрокомпьютера и выполнен с возможностью вычислять целевые значения высоты транспортного средства, коэффициента демпфирования вибрации и жесткости пружины с использованием данных, введенных в него, и данных, сохраненных заранее. Например, сигналы определения из датчика скорости транспортного средства, датчика управления высотой переднего правого (FR) колеса, датчика управления высотой переднего левого (FL) колеса, датчика управления высотой заднего правого (RR) колеса, датчика управления высотой заднего левого (RL) колеса, датчика вертикального ускорения переднего правого (FR) колеса, датчика вертикального ускорения переднего левого (FL) колеса, датчика вертикального ускорения заднего правого (RR) колеса и датчика вертикального ускорения заднего левого (RL) колеса вводятся в модуль 40 вычисления. Здесь традиционные датчики могут быть использованы в качестве вышеприведенных датчиков.
Помимо этого, чтобы управлять характеристикой подвески, скорректированная высота транспортного средства, скорректированный коэффициент демпфирования вибрации и скорректированная жесткость пружины вводятся в модуль 40 вычисления. В частности, скорректированная высота транспортного средства используется для того, чтобы корректировать высоту транспортного средства согласно управляющему индексу Iout спортивности. С этой целью карта, на которой скорректированная высота транспортного средства определяется в соответствии с управляющим индексом Iout спортивности, подготавливается заранее, и скорректированная высота транспортного средства определяется со ссылкой на карту, подготовленную таким образом. Между тем, скорректированный коэффициент демпфирования используется для того, чтобы корректировать коэффициент демпфирования устройства демпфирования вибрации, к примеру, амортизатора. С этой целью карта, на которой скорректированный коэффициент демпфирования определяется в соответствии с управляющим индексом Iout спортивности, подготавливается заранее, и скорректированный коэффициент демпфирования определяется со ссылкой на карту, подготовленную таким образом. В частности, скорректированный коэффициент демпфирования увеличивается согласно увеличению управляющего индекса Iout спортивности, и если скорректированный коэффициент демпфирования является большим, жесткость подвески повышается. Аналогично, скорректированная жесткость пружины используется для того, чтобы корректировать жесткость пружины в подвеске. С этой целью карта, на которой скорректированная жесткость пружины определяется в соответствии с управляющим индексом Iout спортивности, подготавливается заранее, и скорректированная жесткость пружины определяется со ссылкой на карту, подготовленную таким образом. Скорректированная жесткость пружины также увеличивается согласно увеличению управляющего индекса Iout спортивности, и если скорректированная жесткость пружины является большой, жесткость подвески также повышается.
Как показано на фиг.20, модуль 40 вычисления выполнен с возможностью осуществлять вычисление с использованием вышеописанных данных. В качестве результата вычисления вычисленная высота целевого транспортного средства передается в модуль 41 управления высотой транспортного средства в форме сигнала команды управления, и высота транспортного средства изменяется согласно управляющему индексу Iout спортивности. В частности, высота транспортного средства относительно понижается в случае, если управляющий индекс Iout спортивности является относительно большим. Аналогично, целевой коэффициент демпфирования, вычисленный посредством модуля 40 вычисления, передается в модуль 42 управления коэффициентом демпфирования в форме сигнала команды управления, и коэффициент демпфирования изменяется согласно управляющему индексу Iout спортивности. В частности, коэффициент демпфирования относительно увеличивается в случае, если управляющий индекс Iout спортивности является относительно большим. Аналогично, целевая жесткость пружины, вычисленная посредством модуля 40 вычисления, передается в модуль 43 управления жесткостью пружины в форме сигнала команды управления, и жесткость пружины изменяется согласно управляющему индексу Iout спортивности. В частности, жесткость пружины относительно увеличивается в случае, если управляющий индекс Iout спортивности является относительно большим.
Таким образом, система управления транспортного средства настоящего изобретения допускает регулирование характеристики подвески в соответствии с намерением водителя, окружением движения и состоянием движения транспортного средства, тем самым изменяя характеристику подвески согласно управляющему индексу Iout спортивности, определенному на основе ускорения (например, продольного ускорения Gx и поперечного ускорения Gy). Следовательно, в случае, если продольное ускорение и/или поперечное ускорение управляемого транспортного средства является относительно небольшим, так что транспортное средство движется плавно, подвеска смягчается, и комфорт во время езды транспортного средства тем самым повышается. Наоборот, в случае, если продольное ускорение и/или поперечное ускорение управляемого транспортного средства является относительно большим, т.е. в случае, если требуется быстрая и резкая реакция транспортного средства, жесткость подвески увеличивается. В этом случае, следовательно, опускание или подъем кузова транспортного средства выше колес и крен или "галопирование" транспортного средства и т.д. могут быть уменьшены. Следовательно, маневренность транспортного средства может быть повышена. Как описано выше, ускорение может быть вычислено на основе абсолютного значения ускорения, определяемого посредством датчика ускорения, или на основе информации о функциональной системе и поведении транспортного средства. Альтернативно, ускорение также может быть вычислено на основе абсолютного значения ускорения в сочетании с вышеуказанной информацией.
Как описано выше, система управления транспортного средства настоящего изобретения выполнена с возможностью упрощать удовлетворение определения выполнения операции поворота транспортного средства, усложнять отражение продольного ускорения в индексе и упрощать понижение индекса посредством выполнения режимов управления, поясненных в вышеприведенных примерах. Альтернативно, согласно настоящему изобретению, вышеприведенные режимы управления также могут быть выполнены посредством численной обработки определенных данных или данных, которые должны сравниваться с определенными данными согласно потребностям.
Например, согласно вышеописанному управлению, показанному на фиг.13, передаточное число или ступень коробки переключения передач задается на основе максимальной требуемой величины ускорения, полученной на основе управляющего индекса Iout спортивности. Согласно режимам управления, показанным на фиг.16-18, управление переключением скорости и управление двигателем выполняется посредством вычисления скорректированной движущей силы, скорректированной ступени коробки переключения передач и скорректированного открытия дроссельного клапана на основе управляющего индекса Iout спортивности, тем самым корректируя эти коэффициенты посредством вычисленных значений коррекции. Согласно управлению, показанному на фиг.19, скорректированный усиливающий крутящий момент и скорректированное передаточное отношение вычисляются на основе управляющего индекса Iout спортивности, и величина управления механизма электроусилителя руля корректируется посредством этих значений. Помимо этого, согласно управлению, показанному на фиг.20, значения коррекции высоты транспортного средства, достигаемой посредством подвески, и коэффициент демпфирования и жесткость пружины подвески вычисляются на основе управляющего индекса Iout спортивности, и эти коэффициенты корректируются посредством вычисленных значений коррекции, тем самым управляя подвеской. Как описано выше, соотношение между управляющим индексом Iout спортивности и каждым из значений коррекции определяется в форме карты, и значение коррекции в соответствии с индексом спортивности, Iout вычисляется со ссылкой на карту. Т.е. соотношение между управляющим индексом Iout спортивности и каждым из значений коррекции должно основываться на картах, подготовленных заранее таким образом. Тем не менее, даже если соотношение между управляющим индексом Iout спортивности и каждым из значений коррекции определяется посредством усреднения множества скорректированных выборочных данных, диапазон предпочтения и намерения водителя является достаточно широким. Следовательно, согласно настоящему изобретению, система управления транспортного средства также может быть выполнена с возможностью исключать расхождение между характеристиками вождения транспортного средства, регулируемыми на основе управляющего индекса Iout спортивности, и ожидаемым ощущением при вождении водителя.
Пример вышеуказанного управления поясняется ниже. Расхождение между характеристиками вождения транспортного средства, регулируемыми на основе управляющего индекса Iout спортивности, и ожидаемым ощущением при вождении водителя не может определяться или измеряться непосредственно. Тем не менее, в случае, если существует расхождение между характеристиками вождения транспортного средства и ожидаемым ощущением при вождении водителя, водитель в большинстве случаев выполняет операцию в ручном режиме, такую как операция переключения передач. Следовательно, такое расхождение между характеристиками вождения транспортного средства и ожидаемым ощущением при вождении водителя может определяться или обнаруживаться посредством определения выполнения операции в ручном режиме. Здесь поясняется пример механизма, который управляется в ручном режиме. Фиг.21 показывает пример функционального механизма для изменения передаточного числа в ручном режиме. В частности, фиг.21(a) показывает положения переключения передач устройства переключения передач кулисного типа для изменения ступени коробки переключения передач трансмиссии 13 в ручном режиме. Устройство переключения передач, показанное на фиг.21(a), выполнено с возможностью задавать режим вождения (т.е. диапазон передач) посредством переключения непоказанного рычага переключения передач в требуемое положение переключения передач. В частности, в механизме переключения передач, показанном на фиг.21(a), "P" является положением для парковки для удержания транспортного средства для парковки, "R" является обратным положением для вождения транспортного средства задним ходом, "N" является нейтральным положением, в котором мощность не передается в колеса, "D" является положением приведения в движение для вождения транспортного средства в прямом направлении при автоматическом задании надлежащего передаточного числа согласно степени открытия акселератора и т.п., и "M" является ручным положением, в котором передаточное число может быть изменено в ручном режиме посредством управления рычагом переключения передач. В случае, если положение переключения передач находится в ручном положении, ступень коробки переключения передач переключается на верхнюю ступень, или передаточное число уменьшается на предварительно определенную величину каждый раз, когда рычаг переключения передач перемещается в положение переключения коробки передач на более высокую передачу, указываемое как "+". Наоборот, ступень коробки переключения передач переключается на нижнюю ступень, или передаточное число увеличивается на предварительно определенную величину каждый раз, когда рычаг переключения передач перемещается в положение переключения коробки передач на более низкую передачу, указываемое как "-".
Фиг.21(b) показывает другое устройство переключения передач трансмиссии 13, допускающее выбор диапазона торможения двигателя, если диапазон доступных передаточных чисел сужается. В устройстве переключения передач, показанном на фиг.21(b), положения "P", "R", "N" и "D" являются идентичными положениям в устройстве переключения передач, показанном на фиг.21(a). В устройстве переключения передач, показанном на фиг.21(b), положение "S", расположенное рядом с положением "P", является первым положением тормоза двигателя, в котором передаточное число со стороны высокой скорости не может ограничивать диапазон доступных передаточных чисел как меньший диапазона в положении привода, и положение "B" является вторым положением тормоза двигателя, в котором передаточное число со стороны высокой скорости дополнительно не может ограничивать диапазон доступных передаточных чисел как меньший диапазона в первом положении тормоза двигателя.
Фиг.21(c) показывает еще один другой пример устройства переключения передач, выполненного с возможностью выполнять переключение коробки передач на более высокую передачу и переключение коробки передач на более низкую передачу посредством нажатия на кнопки. Как показано на фиг.21(c), верхний переключатель 52 и нижний переключатель 53 размещаются с обеих сторон ступицы 51 руля 50. Эти переключатели 52 и 53 выполнены с возможностью выводить сигнал при каждом нажатии. Помимо этого, эти переключатели 52 и 53 выполнены с возможностью приведения в действие в случае, если конкретное положение переключения передач, к примеру, ручное положение выбирается посредством непоказанного рычажного устройства переключения передач. В частности, каждый раз, когда верхний переключатель 52 нажимается, верхний переключатель 52 выводит сигнал для переключения ступени коробки переключения передач на верхнюю ступень или снижения передаточного числа на предварительно определенную величину. Между тем, каждый раз, когда нижний переключатель 53 нажимается, нижний переключатель 53 выводит сигнал для переключения ступени коробки переключения передач на нижнюю ступень или увеличения передаточного числа на предварительно определенную величину.
Фиг.21(d) показывает вращающийся переключатель 54 для регулирования в ручном режиме передаточного числа, которое задается автоматически. В частности, в случае, если вращающийся переключатель 54 поворачивается к стороне "+", переключение коробки передач на более высокую передачу упрощается на относительно низкой скорости. Наоборот, в случае, если вращающийся переключатель 54 поворачивается к стороне "-", переключение коробки передач на более высокую передачу не выполняется легко, так что передаточное число сохраняется при относительно большом значении. Этот вид управления может быть выполнен посредством коррекции карты переключения передач или посредством коррекции параметров для выбора передаточного числа, таких как скорость транспортного средства, степень открытия акселератора и целевая частота вращения двигателя, в соответствии с рабочей величиной вращающегося переключателя 54. Помимо этого, вращающийся переключатель 54 также может быть выполнен с возможностью предотвращать выполнение переключения коробки передач на более высокую передачу, когда он поворачивается к стороне "+", и упрощать переключение коробки передач на более высокую передачу на относительно низкой скорости, когда он поворачивается к стороне "-".
Таким образом, ступень коробки переключения передач или передаточное число могут быть переключены или изменены в ручном режиме посредством любого из этих устройств переключения передач, показанных на фиг.21. Помимо этого, вращающийся переключатель, показанный на фиг.21(d), также может быть использован для того, чтобы регулировать жесткость подвески, высоту транспортного средства, величину усиления посредством механизма электроусилителя руля, соотношение между выходной мощностью двигателя и степенью открытия акселератора и т.д.
Например, в случае, если передаточное число изменяется посредством управления любым из устройств переключения передач, показанных на фиг.21, в ручном режиме, или в случае, если жесткость подвески, высота транспортного средства или величина усиления посредством механизма электроусилителя руля изменяется посредством непоказанного вращающегося переключателя и т.п., считается, что водитель может быть не удовлетворен текущими характеристиками вождения транспортного средства. В этом случае, следовательно, выполняется коррекция характеристик вождения транспортного средства. Фиг.22 является блок-схемой последовательности операций способа, поясняющей пример коррекции характеристик вождения. Процедура, показанная на фиг.22, повторяется с предварительно определенными короткими интервалами в случае, когда характеристики вождения транспортного средства задаются на основе управляющего индекса Iout спортивности, определенного на основе ускорение. Прежде всего, вводятся сведения по выполняемой операции в ручном режиме (на этапе S300). В частности, сведения и величина операции переключения передач в ручном режиме посредством устройства переключения передач, показанного на фиг.21, либо операции в ручном режиме для изменения жесткости подвески, высоты транспортного средства или величины усиления посредством механизма электроусилителя руля вводятся на этапе S300. Затем выполняется вычисление для коррекции характеристик вождения, заданных посредством операции в ручном режиме (на этапе S301).
В частности, характеристики вождения, которые должны быть скорректированы, включают в себя характеристики ходовой части и движущей силы. Более конкретно, характеристики ходовой части включают в себя характеристику механизма подвески и характеристику поворачиваемости механизма электроусилителя руля, и характеристики движущей силы включают в себя характеристику выходной характеристики двигателя и характеристику переключения передач трансмиссии. На этапе S301, значение коррекции, по меньшей мере, одной из этих характеристик вычисляется, тем не менее, как описано, характеристики вождения транспортного средства обуславливаются множеством параметров, включающих в себя ускорение. Следовательно, вместо такого непосредственного вычисления значения коррекции и характеристик вождения, значение коррекции или содержание коррекции любого из этих параметров, определяющих характеристики вождения, также может быть вычислено на этапе S301.
В этом случае, например, сначала корректируется мгновенный индекс Iin спортивности. В вышеописанных примерах мгновенный индекс Iin спортивности вычисляется на основе синтезированного ускорения из продольного ускорения Gx и поперечного ускорения Gy (или их абсолютного значения). Тем не менее, в этом случае мгновенный индекс Iin спортивности корректируется, и управляющий индекс Iout спортивности определяется на основе скорректированного мгновенного индекса Iin спортивности. В частности, в случае, если операция в ручном режиме выполняется таким образом, что она повышает спортивность транспортного средства, мгновенный индекс Iin спортивности корректируется так, что он увеличивается посредством умножения мгновенного индекса Iin спортивности на предварительно определенный коэффициент, превышающий "l". Наоборот, в случае, если операция в ручном режиме выполняется таким образом, что она сдерживает в определенных рамках спортивность транспортного средства, мгновенный индекс Iin спортивности корректируется так, что он снижается посредством умножения мгновенного индекса Iin спортивности на предварительно определенный коэффициент, меньший "1". В частности, коэффициент, используемый таким образом для того, чтобы корректировать мгновенный индекс Iin спортивности, является постоянным значением, чтобы не предоставлять неожиданное ощущение водителю, и мгновенный индекс Iin спортивности корректируется на этот коэффициент каждый раз, когда вышеописанная операция в ручном режиме выполняется. Альтернативно, также можно подготавливать переменный коэффициент или множество коэффициентов в соответствии с содержанием операций в ручном режиме и выбирать надлежащий коэффициент в зависимости от содержания выполняемой вручную операции. Помимо этого, вышеописанная степень нормализации и весовой коэффициент, используемые для того, чтобы нормализовать ускорения Gx и Gy, также могут быть изменены в зависимости от содержания выполняемой операции в ручном режиме. Здесь операция в ручном режиме, чтобы повышать спортивность транспортного средства, включает в себя операцию переключения коробки передач на более низкую передачу, операцию, чтобы увеличивать жесткость механизма подвески, операцию, чтобы уменьшать высоту транспортного средства, и операцию, чтобы повышать непосредственное ощущение рулевого управления посредством уменьшения величины усиления механизма электроусилителя руля. Между тем, ручная операция, чтобы сдерживать в определенных рамках спортивность транспортного средства, включает в себя операции, обратные вышеприведенным операциям.
Вместо такой коррекции мгновенного индекса Iin спортивности, на этапе S301 также можно корректировать управляющий индекс Iout спортивности, определенный на основе мгновенного индекса Iin спортивности. В этом случае такая коррекция управляющего индекса Iout спортивности может быть выполнена в соответствии со сведениями по выполняемым вручную операциям, как в случае коррекции мгновенного индекса Iin спортивности. Помимо этого, вместо такой коррекции мгновенного индекса Iin спортивности или управляющего индекса Iout спортивности, также можно корректировать любую из базовых характеристик, определенных в соответствии с управляющим индексом Iout спортивности, таких как максимальная требуемая величина ускорения, скорректированная движущая сила, скорректированная ступень коробки переключения передач, скорректированная степень открытия дроссельного клапана, скорректированный усиливающий крутящий момент, скорректированное передаточное отношение, скорректированная высота транспортного средства, скорректированный коэффициент демпфирования, скорректированная жесткость пружины и т.д. В частности, эти коэффициенты корректируются по направлению или по величине так, что они повышают спортивность транспортного средства в случае, если выполняется операция в ручном режиме, чтобы повышать спортивность. Наоборот, в случае, если операция в ручном режиме, чтобы сдерживать в определенных рамках спортивность транспортного средства, выполняется, эти коэффициенты корректируются по направлению или по величине так, что они сдерживают в определенных рамках спортивность, чтобы управлять транспортным средством плавно или мягко. В этом случае, аналогично случаю коррекции мгновенного индекса Iin спортивности, вышеуказанные базовые характеристики корректируются посредством выполнения любой из четырех арифметических операций с использованием коэффициента, подготовленного заранее.
После выполнения вышеописанной коррекции на этапе S301 определяется, удовлетворяется или нет условие, чтобы выполнять коррекцию. Например, такая коррекция характеристик вождения поясненного транспортного средства выполняется, когда ускорение или угол поворота колес транспортного средства изменяется вручную, в то время как транспортное средство движется. В этом случае, поскольку транспортное средство тем самым движется, эти операции в ручном режиме могут быть выполнены в случае, когда транспортное средство уже ускорено, замедлено или повернуло. Если эта операция ускорения/замедления или операция поворота перекрывается с продолжающимся изменением в ускорении/замедлении или углу поворота транспортного средства, фактическое поведение транспортного средства может отклоняться от ожидаемого водителем поведения, и водитель может испытывать некомфортное ощущение. Следовательно на следующем этапе, определяется, является или нет текущее состояние транспортного средства состоянием, в котором водитель не испытывает некомфортное ощущение, или в котором некомфортное ощущение водителя может быть уменьшено, если коррекция выполняется. С этой целью определяется, находится или нет продольное ускорение транспортного средства (т.е. ускорение и торможение) в предварительно определенной области (на этапе S302). В частности, предварительно определенная область задается в области в круге трения, показанном на фиг.2, в которой компонент продольного ускорения Gx учитывает существенную долю синтезированного ускорения (т.е. мгновенный индекс Iin спортивности). Например, предварительно определенная область задается посредством линий, идущих по отдельности с обеих сторон линии, представляющей продольное ускорение Gx, от центра круга трения под углом 45 градусов, плюс/минус 5 градусов. Такая предварительно определенная область задается не только в области ускорения, но также и на стороне замедления в качестве области торможения. Т.е. оставшиеся области в круге трения, помимо области ускорения и области торможения, являются областями поворота. Следовательно, компоненты поперечного ускорения Gy в областях поворота превышают компоненты поперечного ускорения Gy областях ускорения и торможения.
В случае, если состояние движения транспортного средства находится в области ускорения или области торможения, так что ответом этапа 302 является "Да", определяется, меньше или нет текущий рывок (т.е. временное дифференциальное значение ускорения или варьирование ускорения в расчете на единицу времени) предварительно определенного значения alfa критерия (на этапе S303). Т.е. определение этапа S303 выполняется для того, чтобы определять, стабилизируется или нет ускорение транспортного средства. Следовательно, вышеуказанное значение alfa критерия задается равным значению, близкому к "0", и определение этапа S303 выполняется вместо определения того, равен или нет рывок "0".
Наоборот, в случае, если ответом этапа S302 является "Нет", коррекция движущей силы не допускается (на этапе S304), и затем процедура переходит к этапу S303. Т.е. в случае, если ответом этапа S302 является "Нет", состояние движения транспортного средства находится в вышеуказанной области поворота. В этом случае, если движущая сила (или крутящий момент приведения в движение) изменяется в результате изменения выходной мощности двигателя или передаточного числа, водитель может испытывать некомфортное ощущение. В этом случае, следовательно, коррекция движущей силы не допускается. Тем не менее, в этом случае разрешается коррекция характеристики ходовой части, в частности характеристик подвески и рулевого управления.
В случае, если ответом этапа S303 является "Нет", процедура возвращается к этапу S302. Т.е. даже в случае, если транспортное средство движется практически прямо вперед, так что ответом этапа S302 является "Да", ответом этапа S303 является "Нет", если продольное ускорение изменяется. В этом случае, если поведение транспортного средства изменяется посредством выполнения коррекции характеристик вождения одновременно с продолжающимся изменением в ускорении, неожиданное изменение в поведении добавляется к намеренному изменению в поведении транспортного средства. Как результат, ощущение при вождении транспортного средства может отклоняться от ожидаемого водителем ощущения, и водитель может испытывать некомфортное ощущение. По этой причине в случае, если ответом этапа S303 является "Нет", процедура возвращается к этапу S302, тем самым не допуская коррекцию характеристик вождения транспортного средства.
Наоборот, в случае, если рывок меньше значения alfa критерия, так что ответом этапа S303 является "Да", коррекция характеристик вождения выполняется (на этапе S305). В частности, на этапе S305 регулировка по времени выполняется для того, чтобы определять время, чтобы изменять движущую силу двигателя, передаточное число трансмиссии, величины управления подвески и электроусилителя руля на основе значений коррекции, вычисленных на этапе S301. Как результат, намерение водителя, проявляющееся как операция в ручном режиме, может отражаться в характеристиках вождения транспортного средства, таких как движущая сила, передаточное число, подвеска и т.д., в надлежащее время.
Затем характеристики вождения, скорректированные таким образом, поддерживаются (на этапе S306). Например, вышеописанная величина коррекции сохраняется, или базовые характеристики изменяются на основе значений коррекции. Т.е. обучающая коррекция выполняется на этапе S306. Следовательно, поведение транспортного средства может регулироваться в соответствии с намерением водителя или ожидаемым ощущением при вождении водителя, в то время как водитель управляет транспортным средством. По этой причине потребность многократно выполнять операцию в ручном режиме исключается, так что водителю предоставляется возможность управлять транспортным средством без некомфортного ощущения. Как результат, маневренность транспортного средства повышается.
Характеристики вождения, скорректированные таким образом, могут поддерживаться до следующего случая, чтобы выполнять коррекцию. Тем не менее, операция в ручном режиме выполняется согласно предпочтению при вождении, которое изменяется в зависимости от водителя и согласно окружению движения, к примеру, состоянию дороги, трафику, области и т.д. Следовательно, в случае, если управляющий индекс Iout спортивности понижается, сохранение скорректированных характеристик вождения может быть ограничено. С этой целью после этапа S306 определяется то, понижается или нет управляющий индекс Iout спортивности (на этапе S307). Такое понижение или уменьшение управляющего индекса Iout спортивности уже пояснено со ссылкой на фиг.4-9. В случае, если ответом этапа S307 является "Нет", процедура возвращается, чтобы продолжать сохранение скорректированных характеристик вождения. Наоборот, в случае, если ответом этапа S307 является "Да", сохранение скорректированных характеристик вождения ограничивается (на этапе S308), и процедура возвращается. В этом случае, в частности, вышеуказанные базовые характеристики задаются как характеристики вождения транспортного средства вместо управляющего индекса Iout спортивности. Здесь вышеуказанные операции в ручном режиме и коррекция характеристик вождения транспортного средства выполняются по-разному в зависимости от водителя. Следовательно, коррекция характеристик вождения транспортного средства может сбрасываться, если главный переключатель транспортного средства выключается.
Фиг.23 показывает пример карты для коррекции характеристик движущей силы (т.е. максимальной требуемой величины ускорения) посредством операции в ручном режиме. В частности, соотношение между управляющим индексом Iout спортивности и максимальной требуемой величиной ускорения указывается на фиг.23, и жирная линия представляет базовые характеристики. Т.е. базовые характеристики определяются как используемые для того, чтобы вычислять максимальную требуемую величину ускорения на основе управляющего индекса Iout спортивности, в случае, если операция в ручном режиме, к примеру, операция переключения передач в ручном режиме не выполняется. Между тем, тонкие линии являются скорректированными характеристическими линиями, подготовленными для использования в случае, если операция в ручном режиме выполняется. В частности, на фиг.23, линия с заголовком "коррекция +" является характеристической линией, которая должна быть использована в случае, если выполняется операция в ручном режиме, чтобы повышать спортивность, к примеру, переключение коробки передач на более низкую передачу. Следовательно, эта линия задается таким образом, чтобы увеличивать максимальную требуемую величину ускорения на основе управляющего индекса Iout спортивности, превышающего управляющий индекс Iout спортивности в соответствии с базовыми характеристиками. Между тем, линия с заголовком "коррекция -" является характеристической линией, которая должна быть использована в случае, если выполняется операция в ручном режиме, чтобы уменьшать спортивность, к примеру, переключение коробки передач на более высокую передачу. Следовательно, эта линия задается таким образом, чтобы снижать максимальную требуемую величину ускорения на основе управляющего индекса Iout спортивности, меньшего управляющего индекса Iout спортивности в соответствии с базовыми характеристиками. Максимальная требуемая величина ускорения, полученная таким образом на основе скорректированной характеристической линии, используется для того, чтобы управлять выходной мощностью двигателя и управлять передаточным числом при удовлетворении условия, чтобы выполнять коррекцию. Следовательно, движущая сила (т.е. крутящий момент приведения в движение) корректируется посредством выполнения коррекции выходной мощности двигателя и передаточного числа.
Таким образом, система управления транспортного средства согласно настоящему изобретению выполнена с возможностью корректировать характеристики вождения транспортного средства на основе выполнения операции в ручном режиме. Тем не менее, система управления транспортного средства не должна быть ограничена так, чтобы иметь возможность корректировать движущую силу на основе выполнения операции переключения передач. Например, согласно настоящему изобретению, система управления транспортного средства также может быть выполнена с возможностью отражать сведения по ручной операции, чтобы изменять характеристики рулевого управления, выходной мощности двигателя, подвески и т.д., в характеристиках вождения транспортного средства на основе выполнения операции переключения передач в ручном режиме. Аналогично, операция в ручном режиме не должна быть ограничена операцией, чтобы изменять выходные характеристики. Например, система управления транспортного средства также может быть выполнена с возможностью осуществлять коррекцию таким образом, чтобы отражать сведения по операции в ручном режиме, чтобы изменять характеристики рулевого управления и подвески во всех характеристиках вождения транспортного средства.
Как поясняется, система управления транспортного средства согласно настоящему изобретению выполнена с возможностью точно регулировать характеристики вождения после выполнения операции в ручном режиме водителем, чтобы изменять жесткость пружины подвески в качестве коэффициента демпфирования. Следовательно, характеристики вождения транспортного средства могут точно регулироваться в соответствии с намерением водителя или предпочтением при вождении водителя.
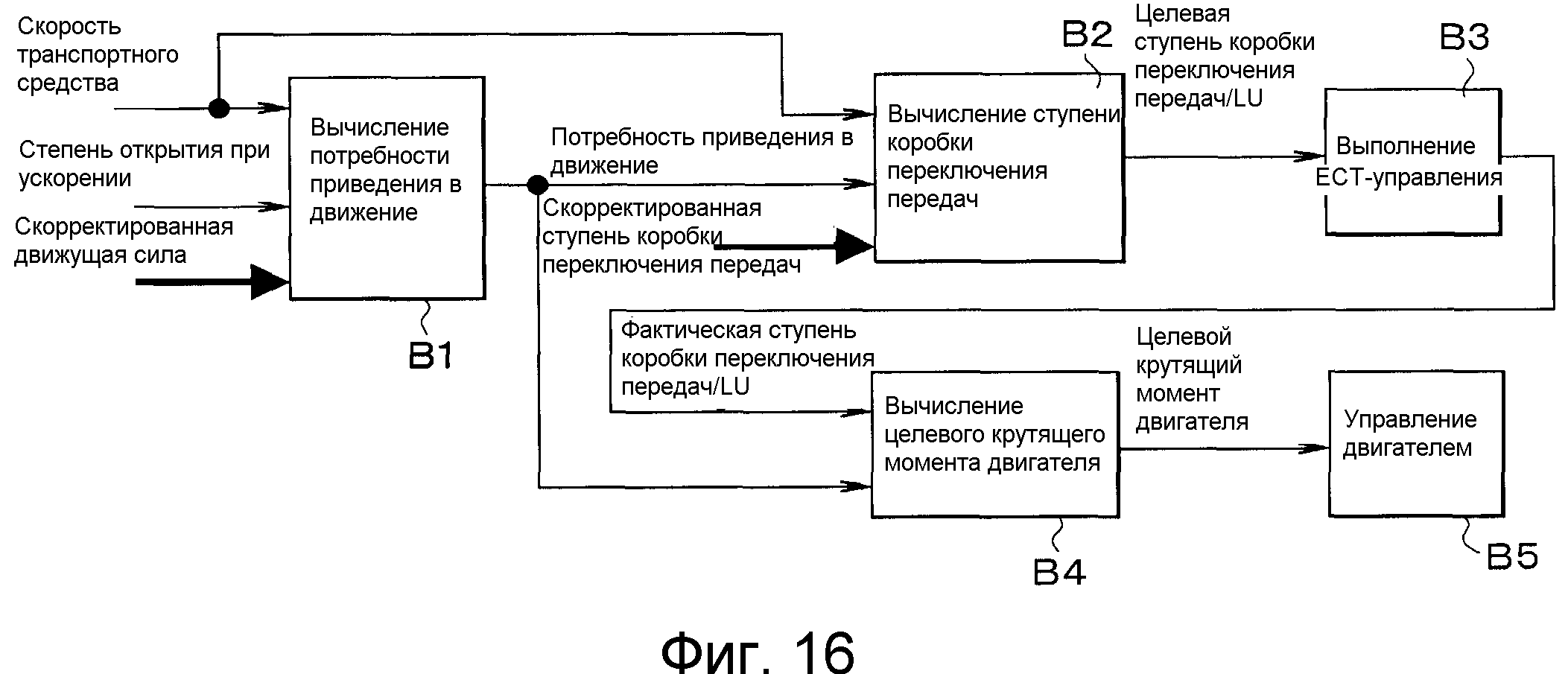
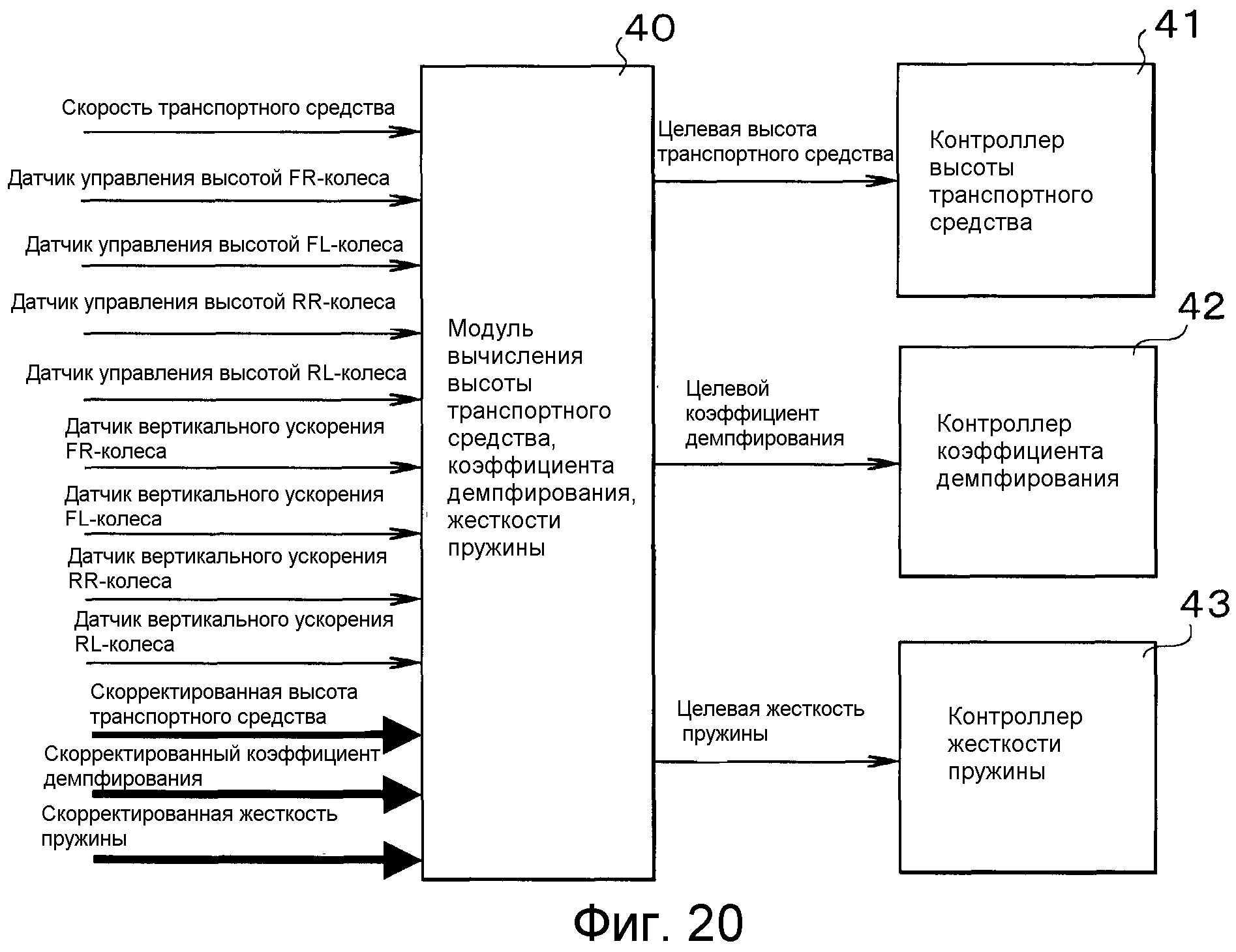
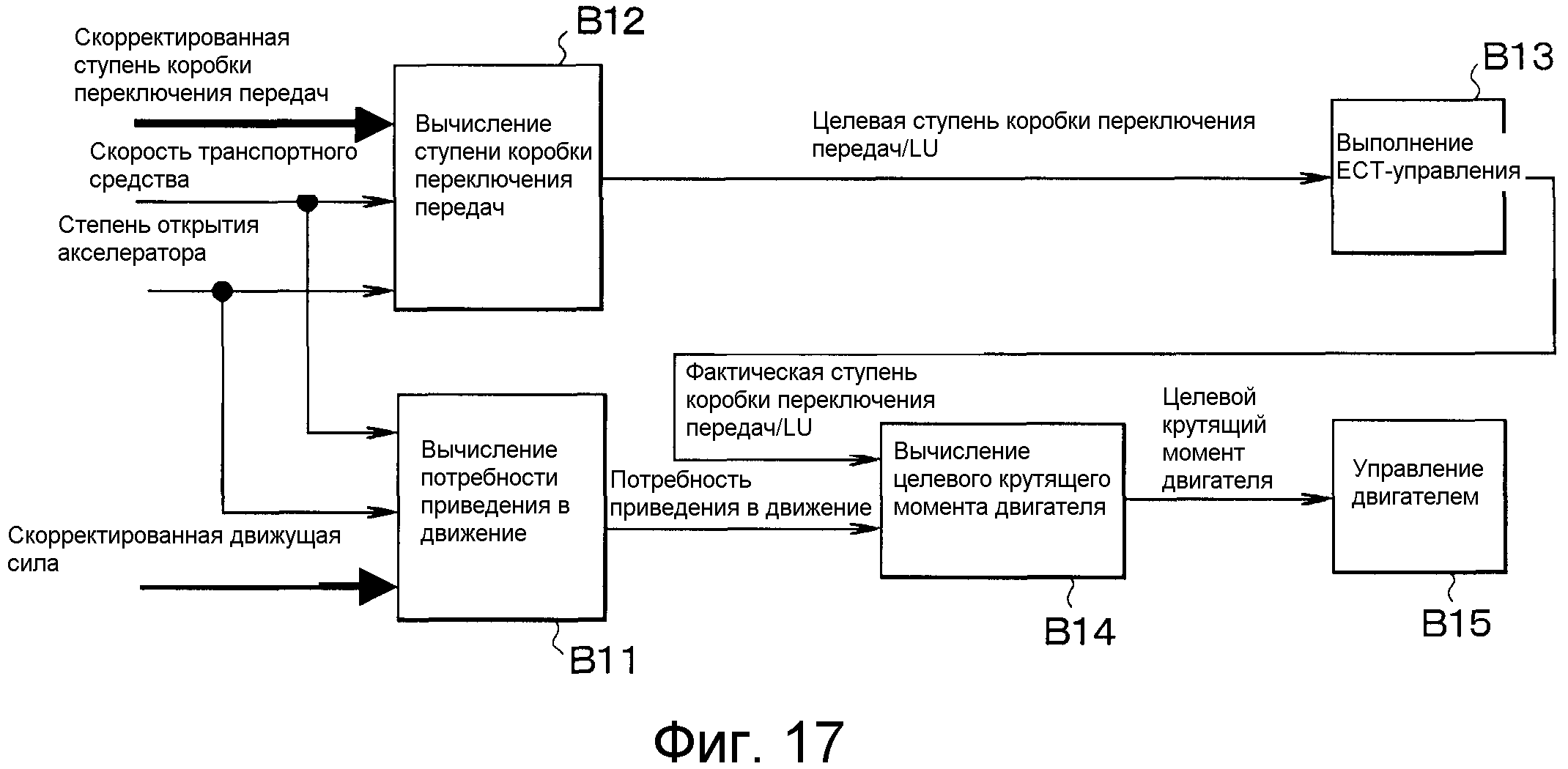
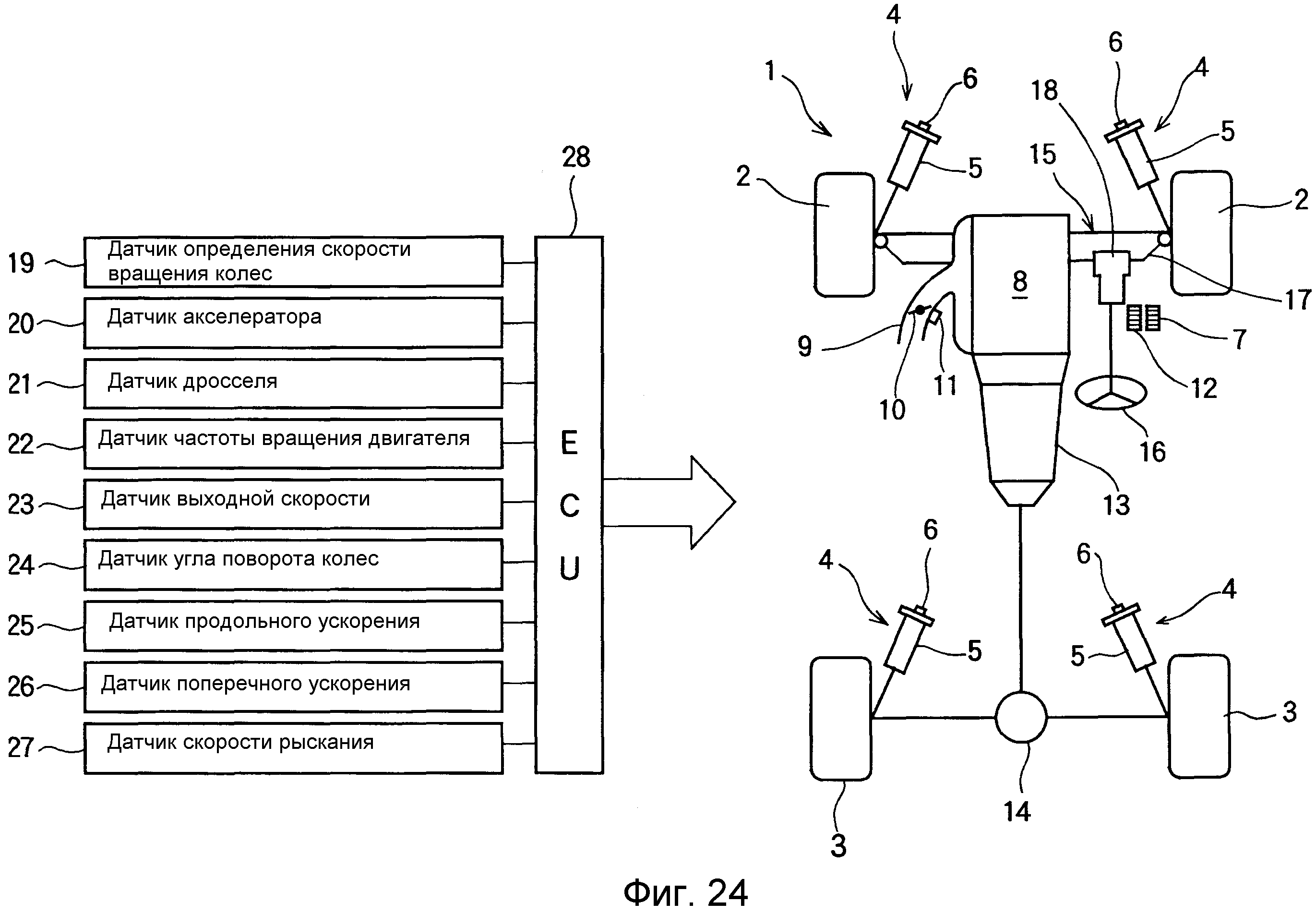
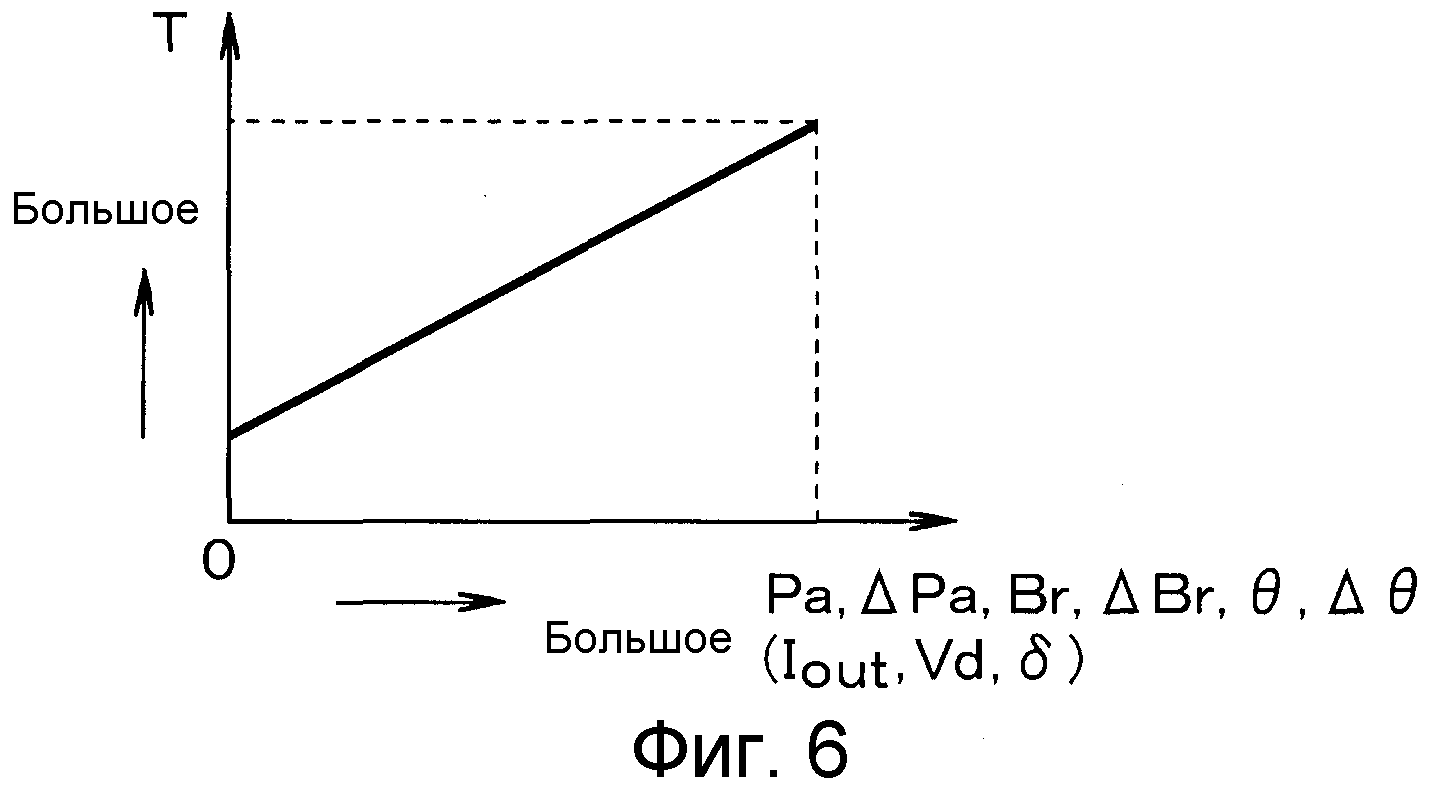
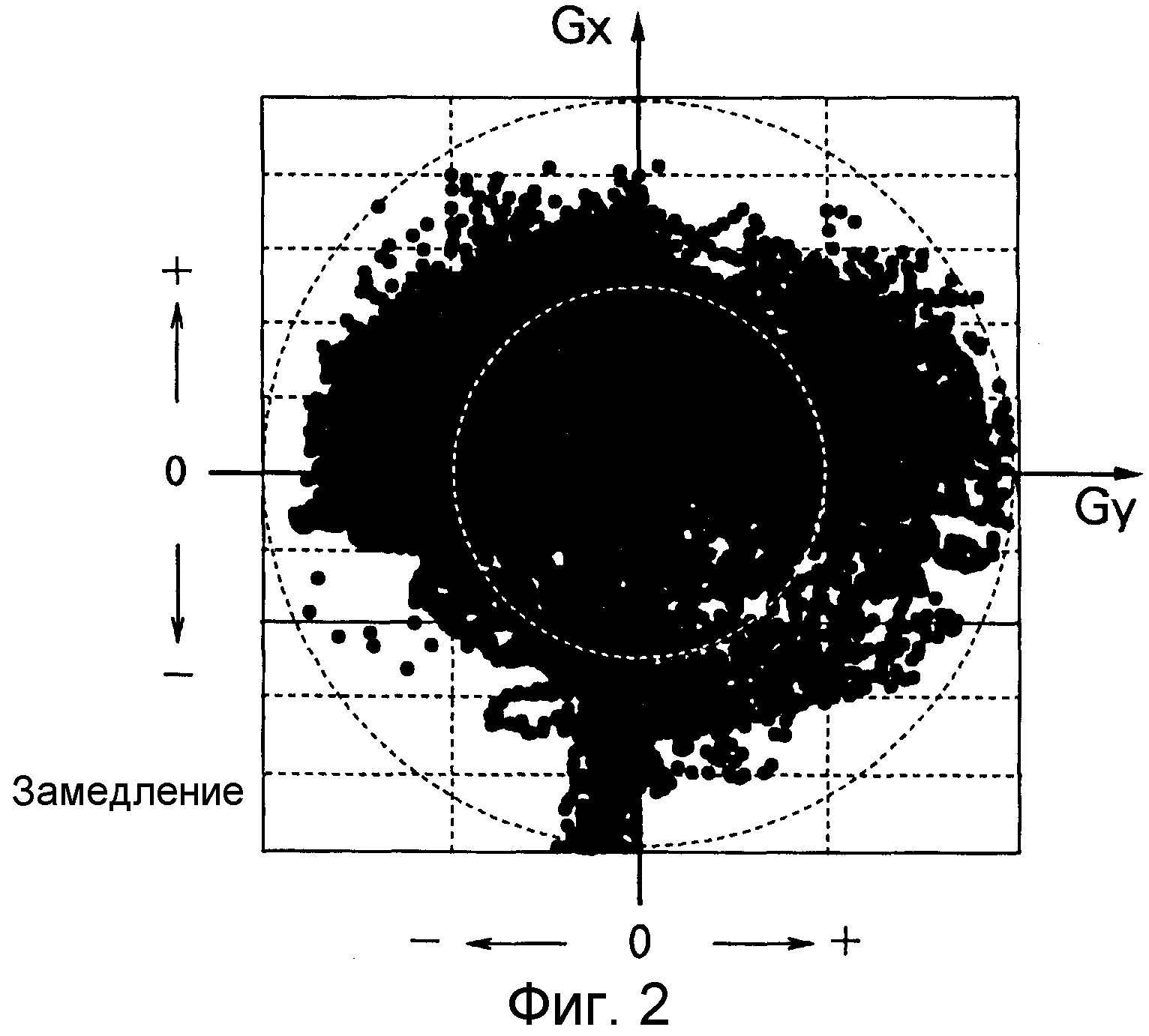
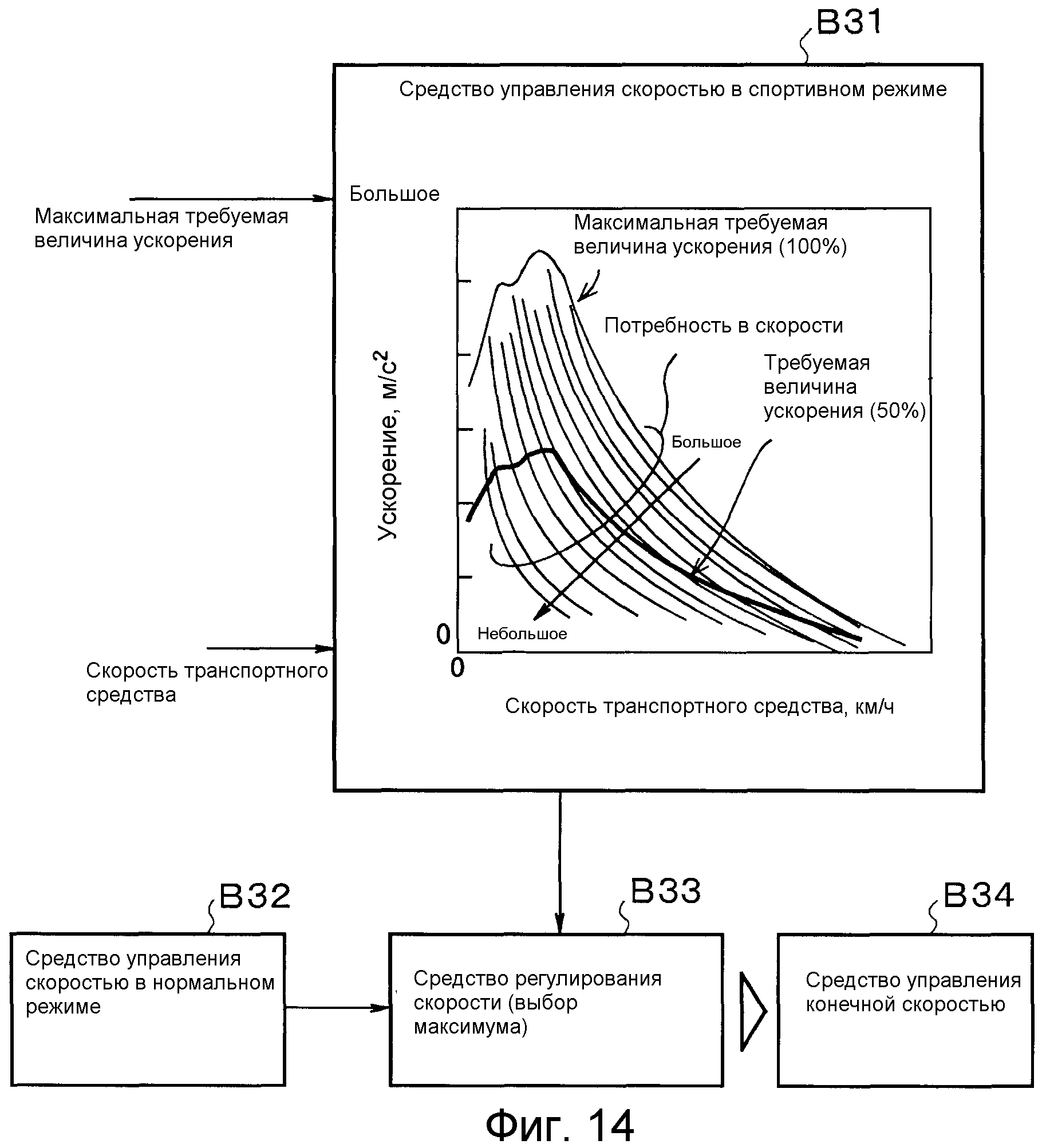
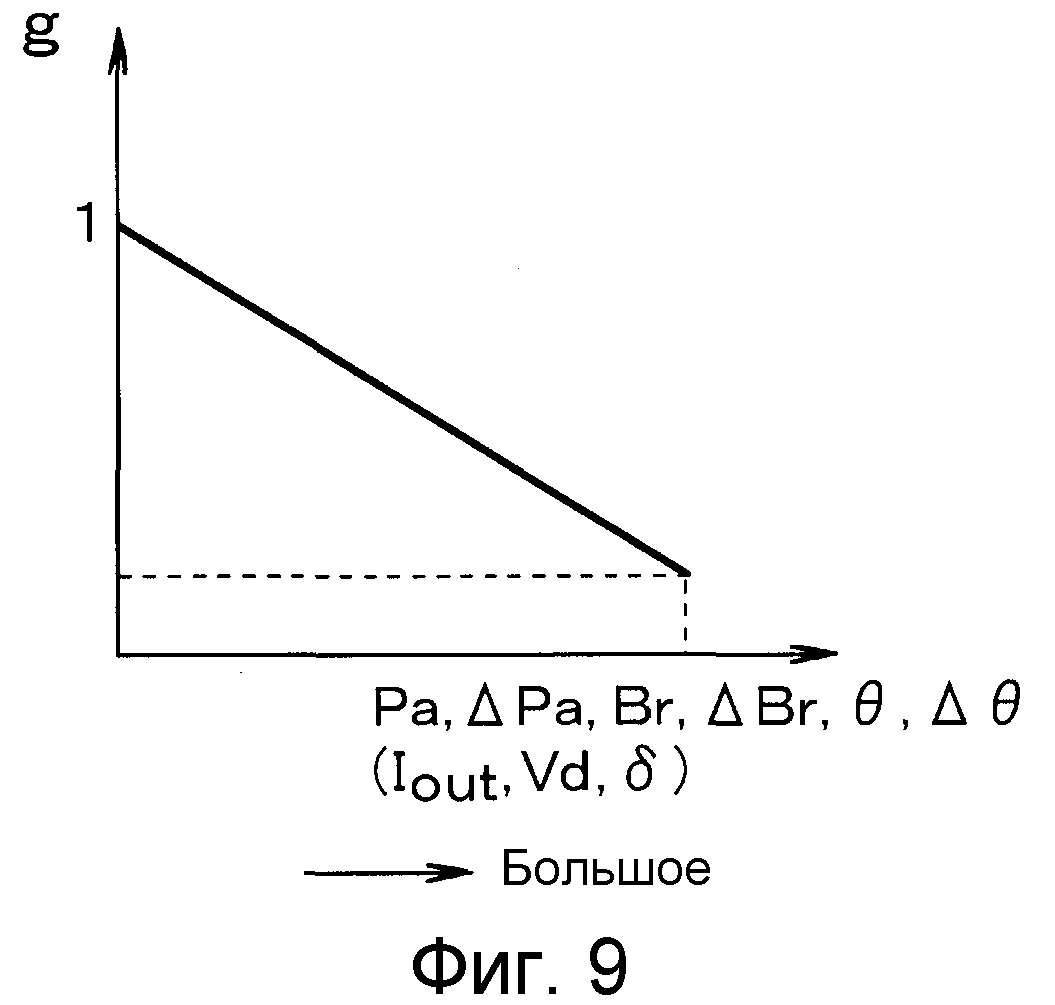
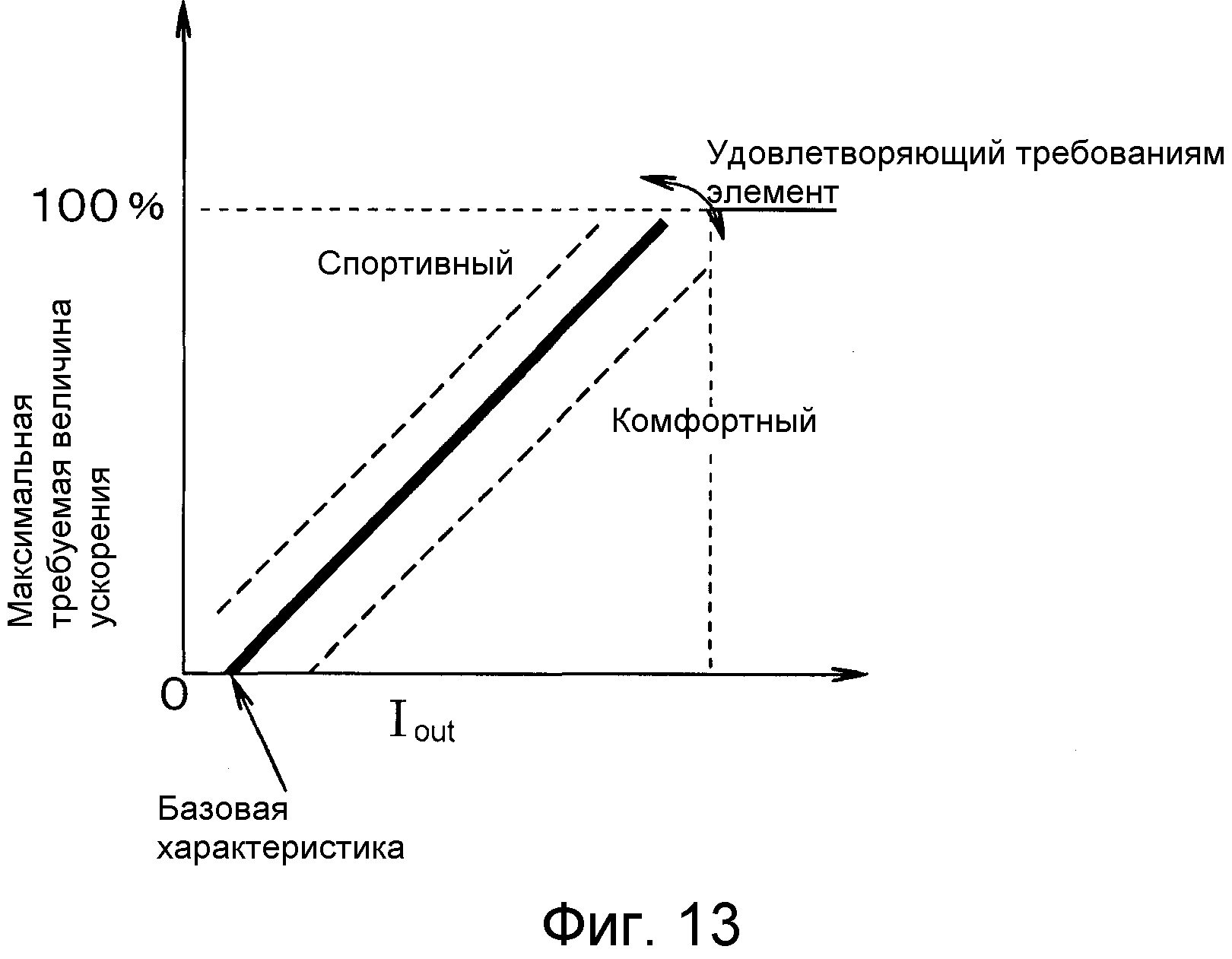
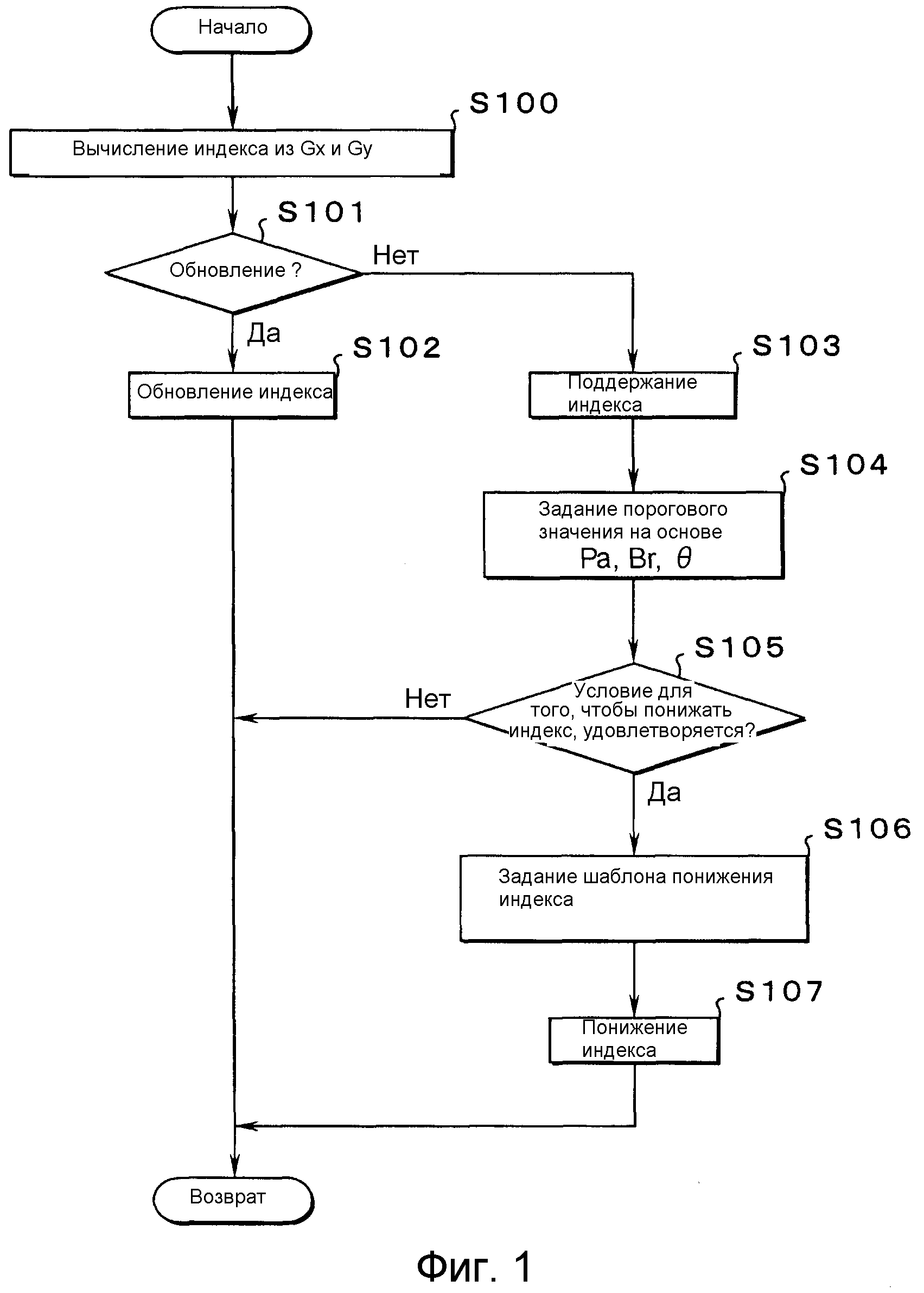
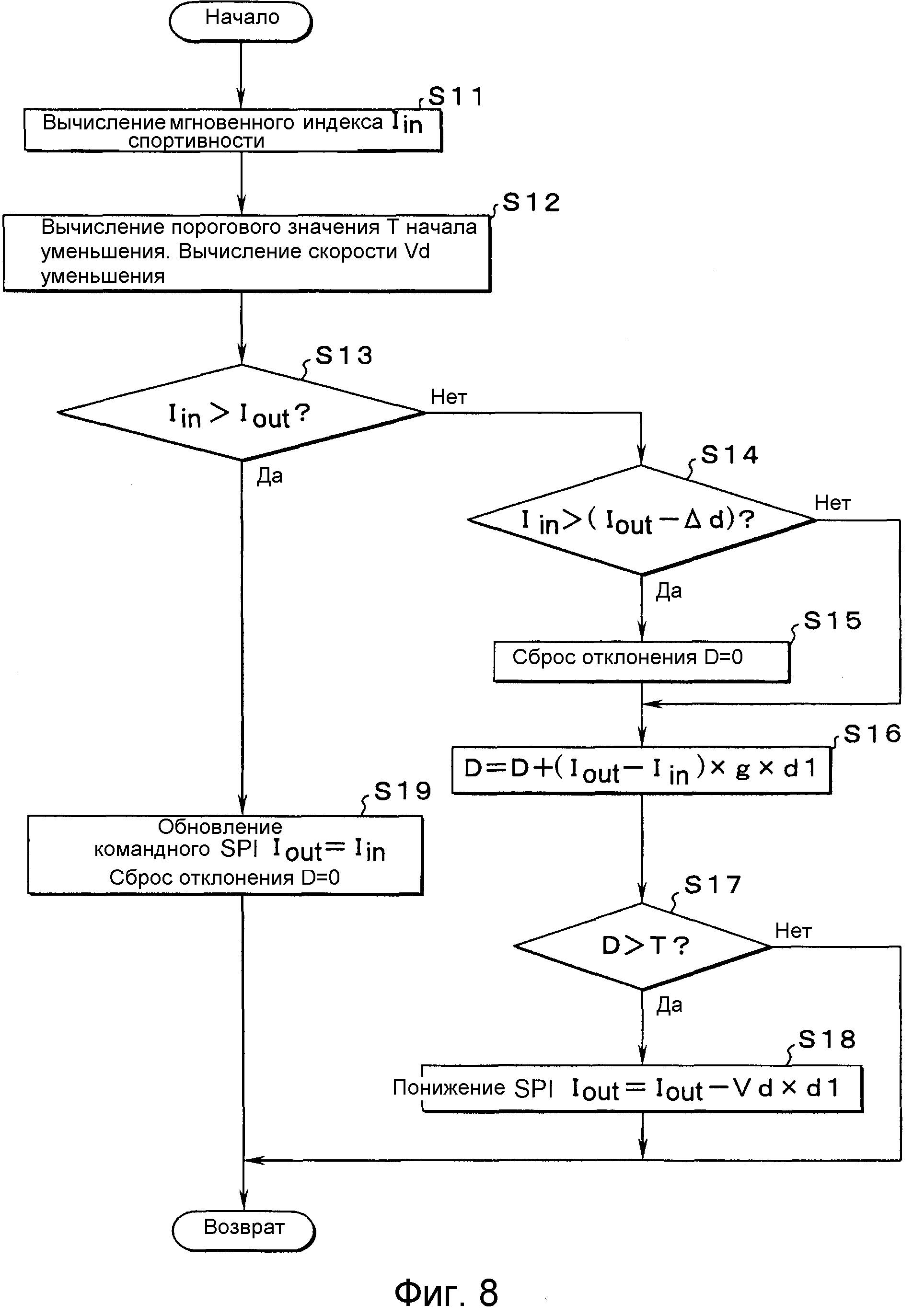
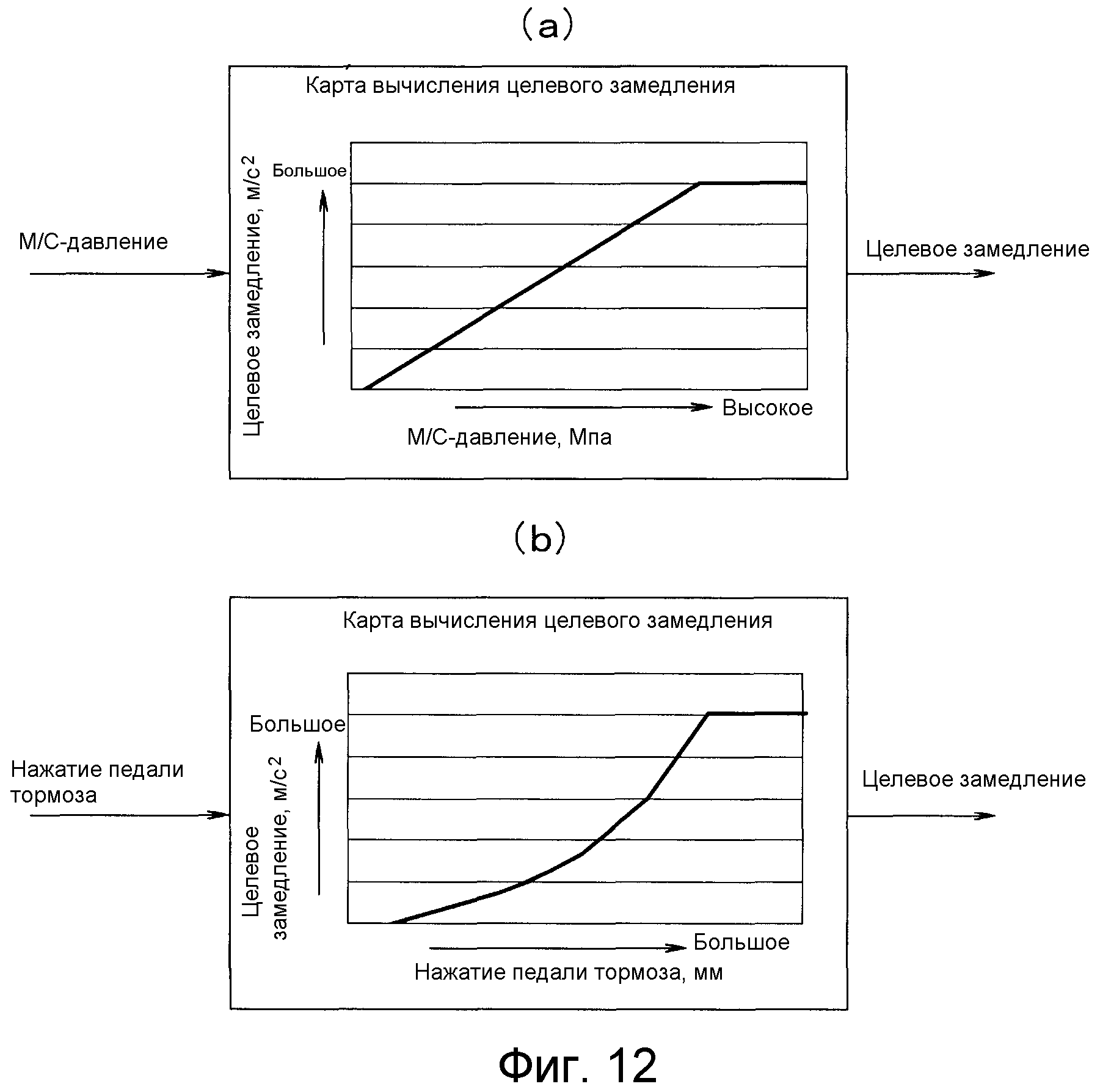
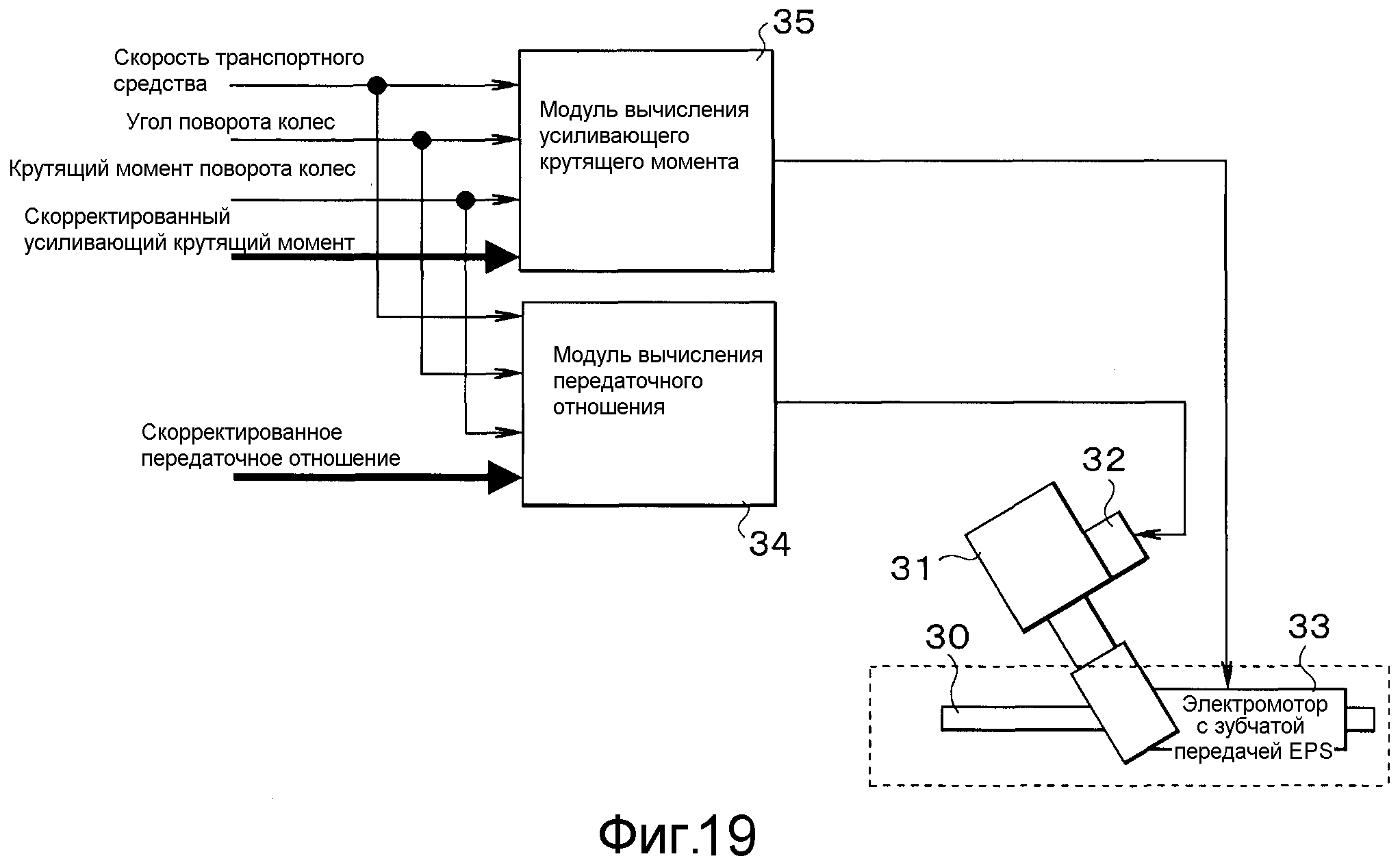
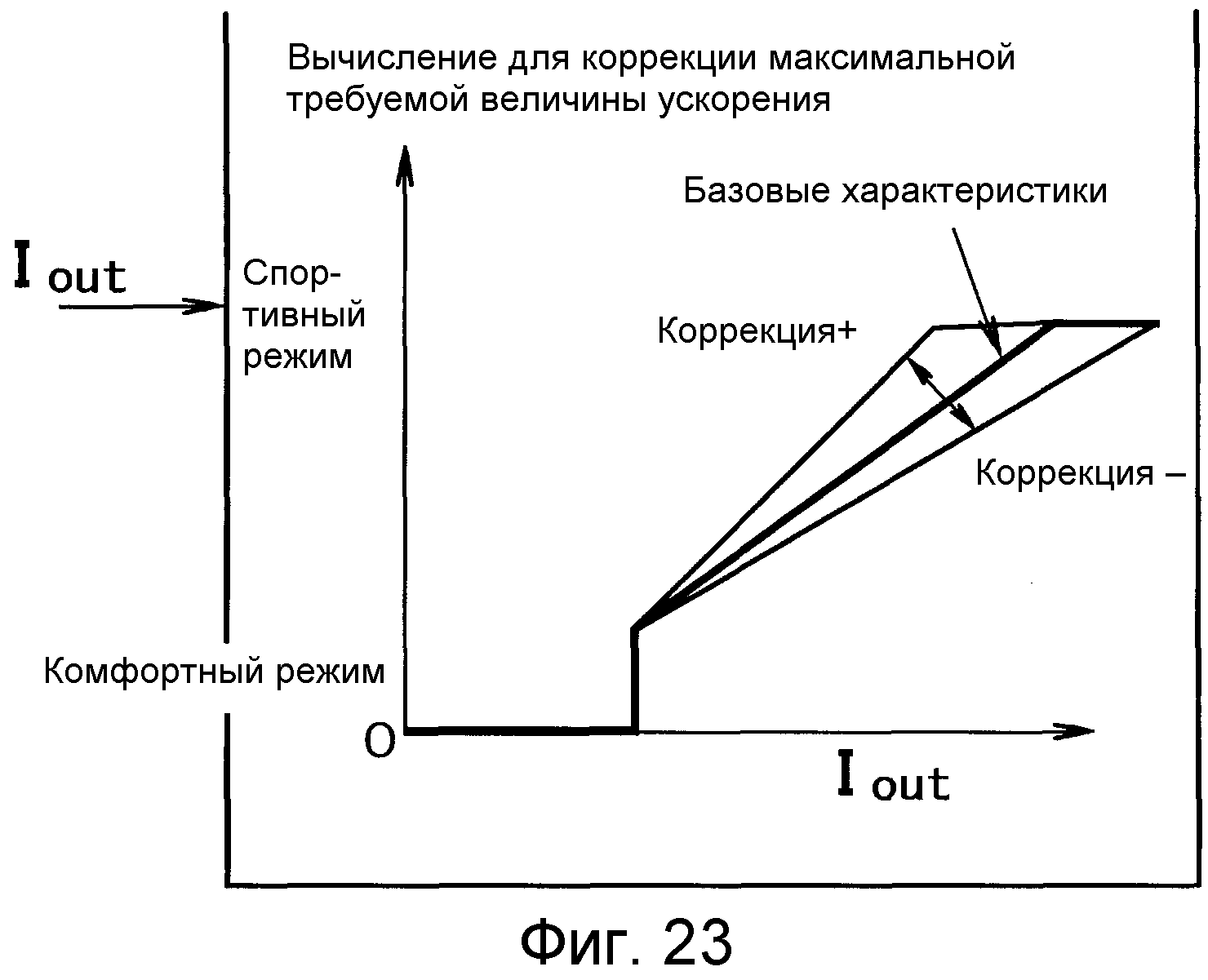
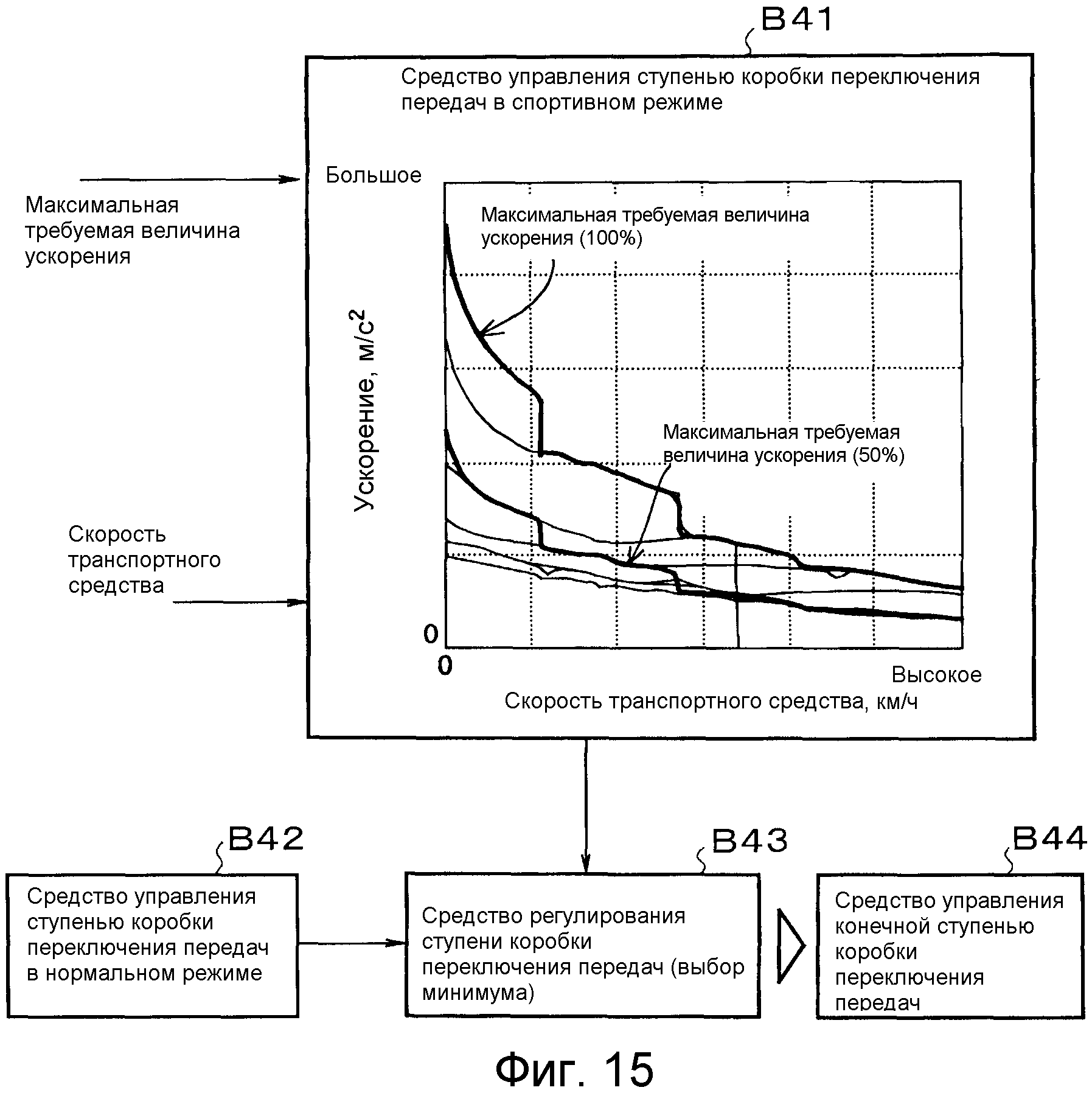
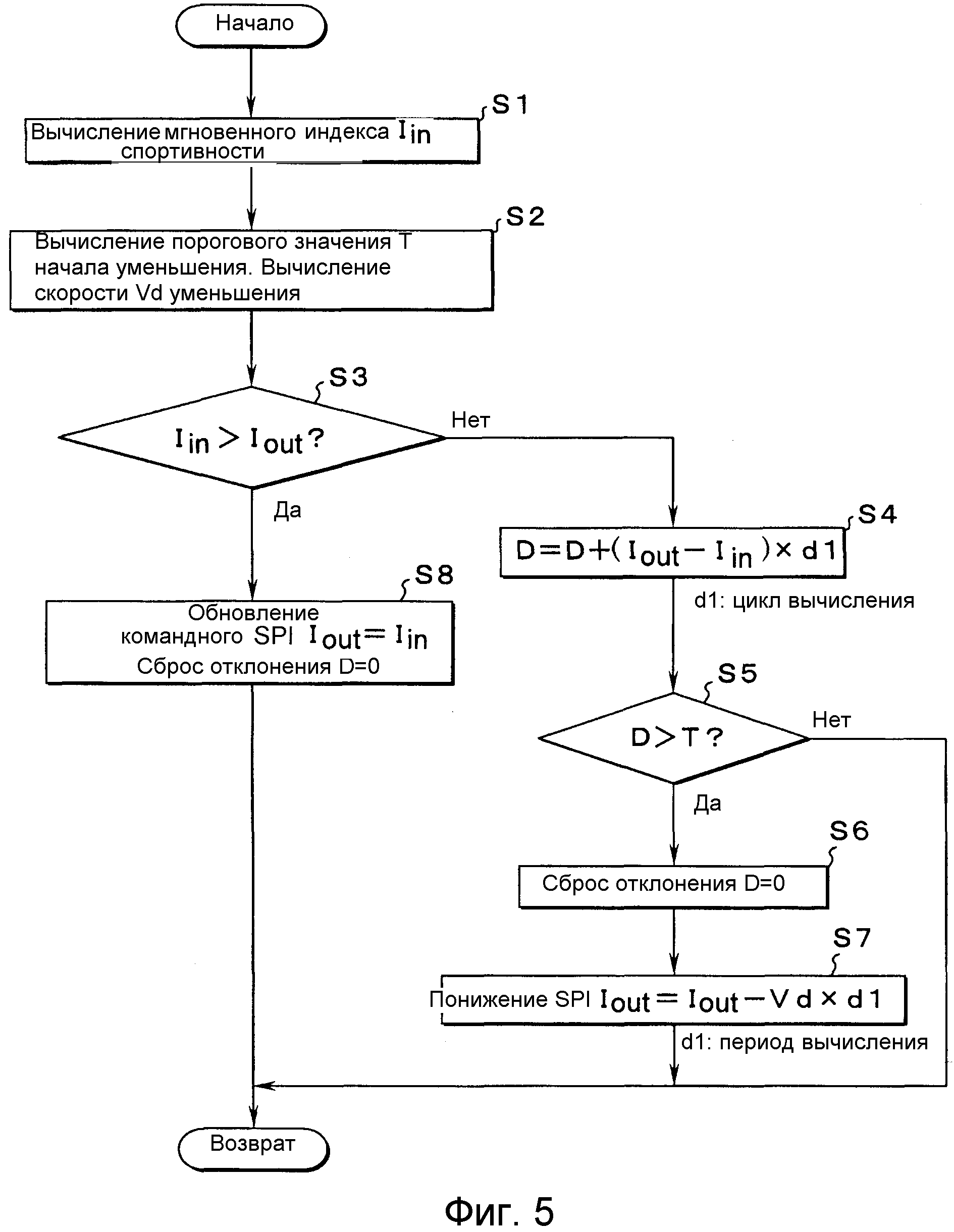
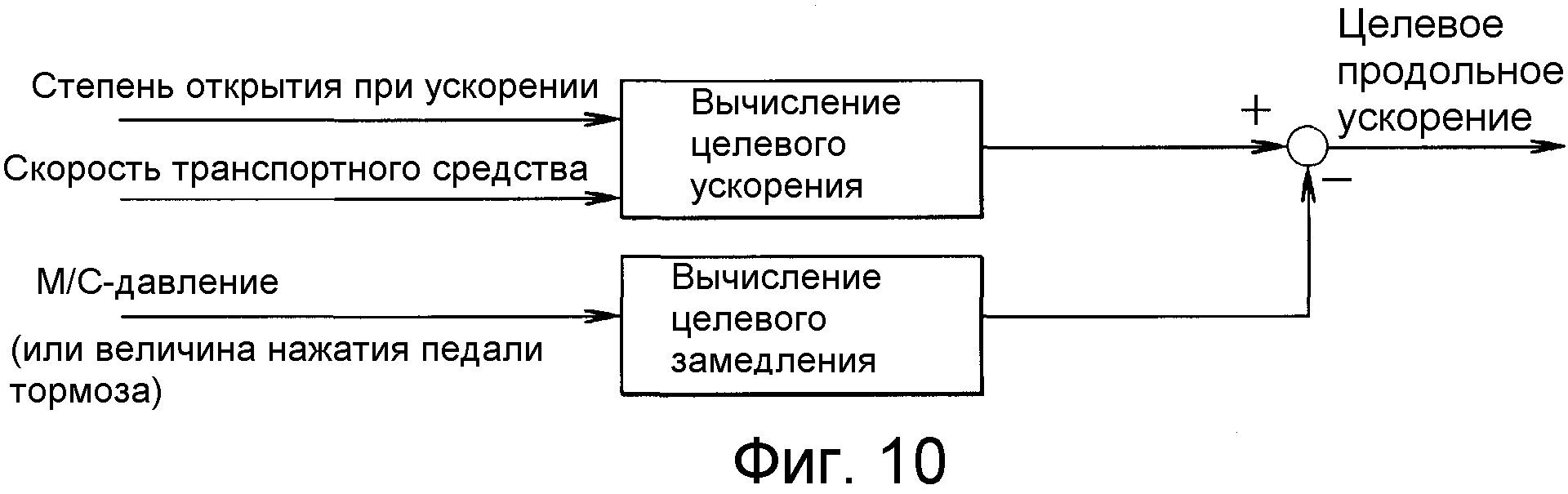
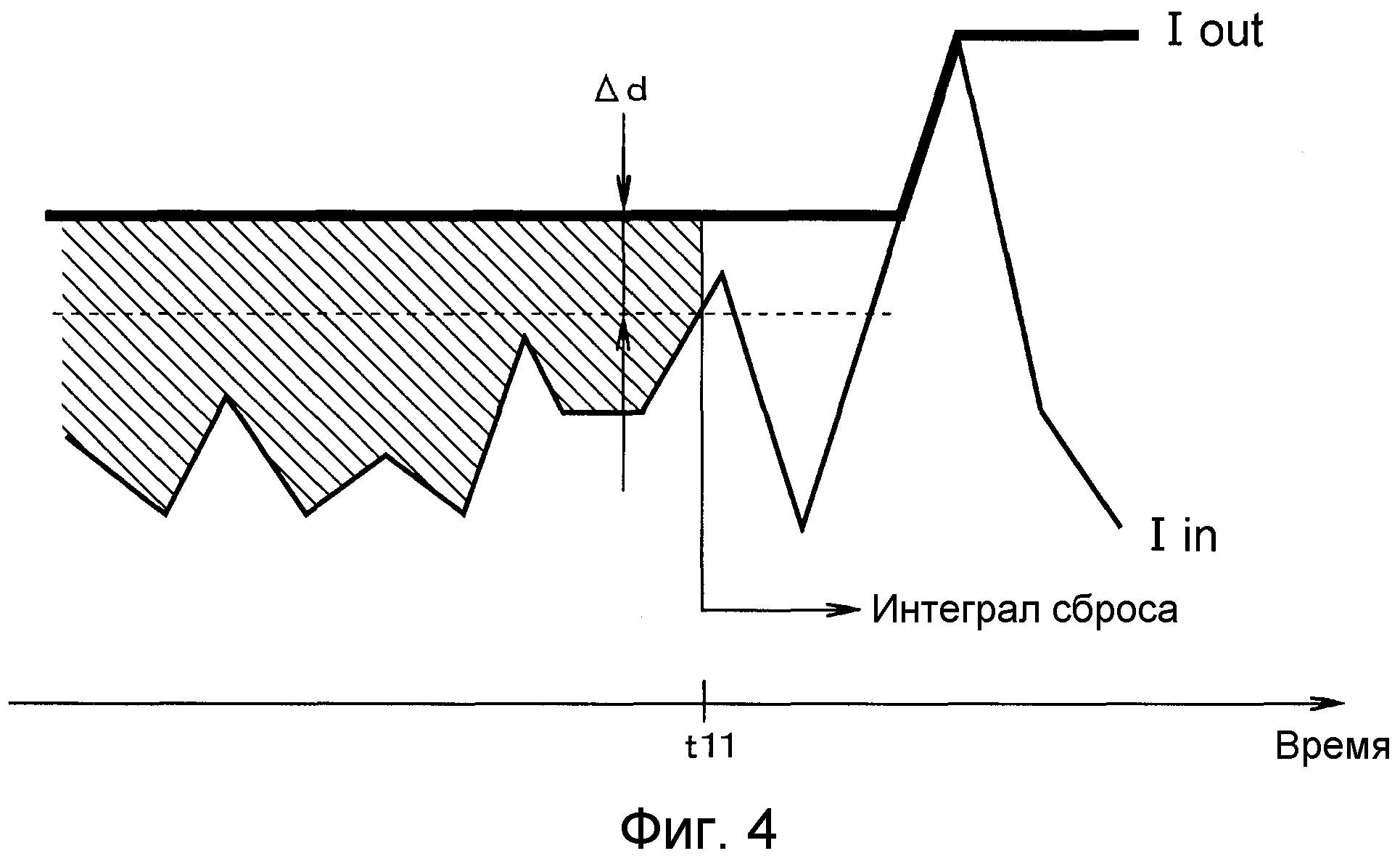
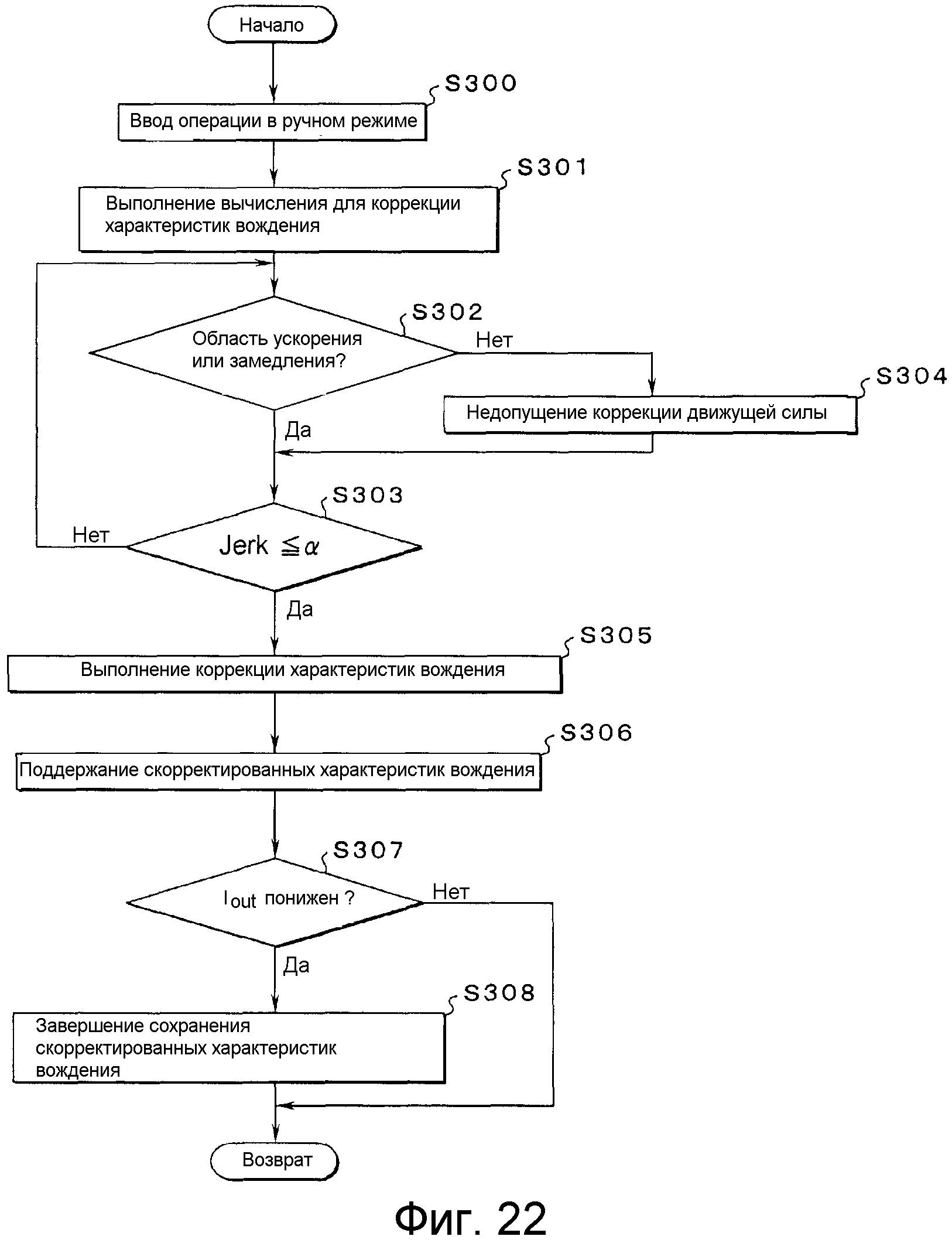
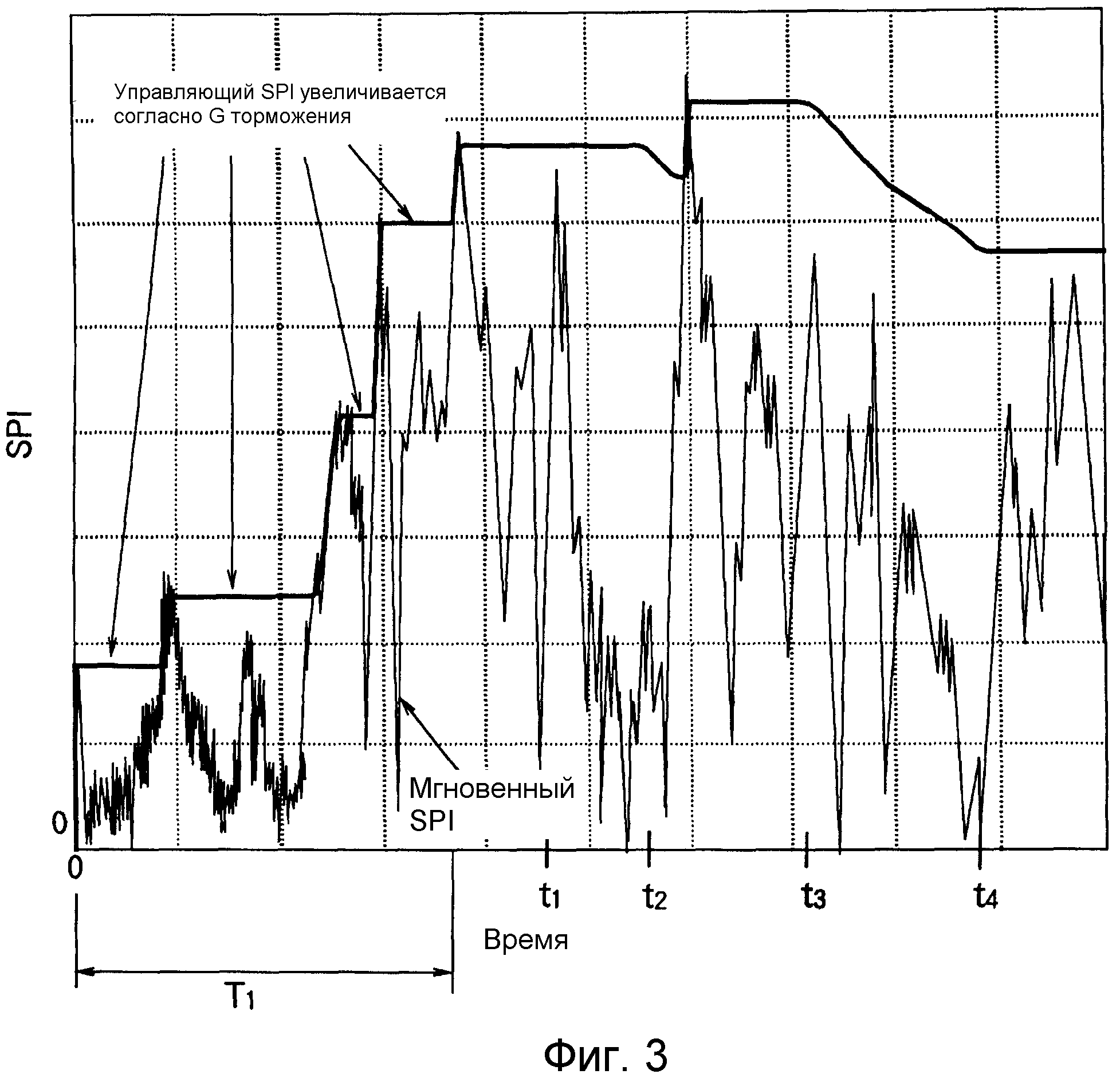
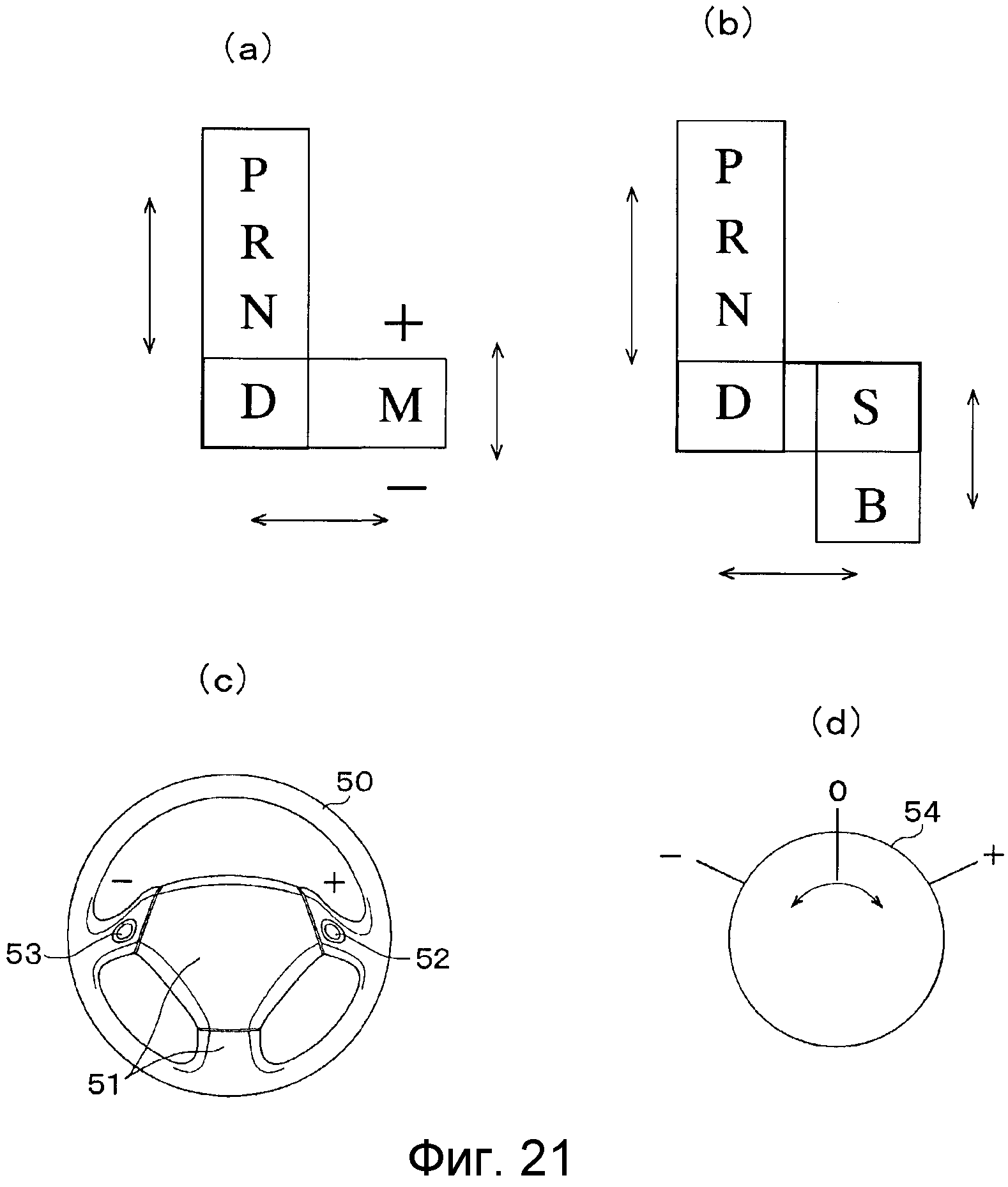
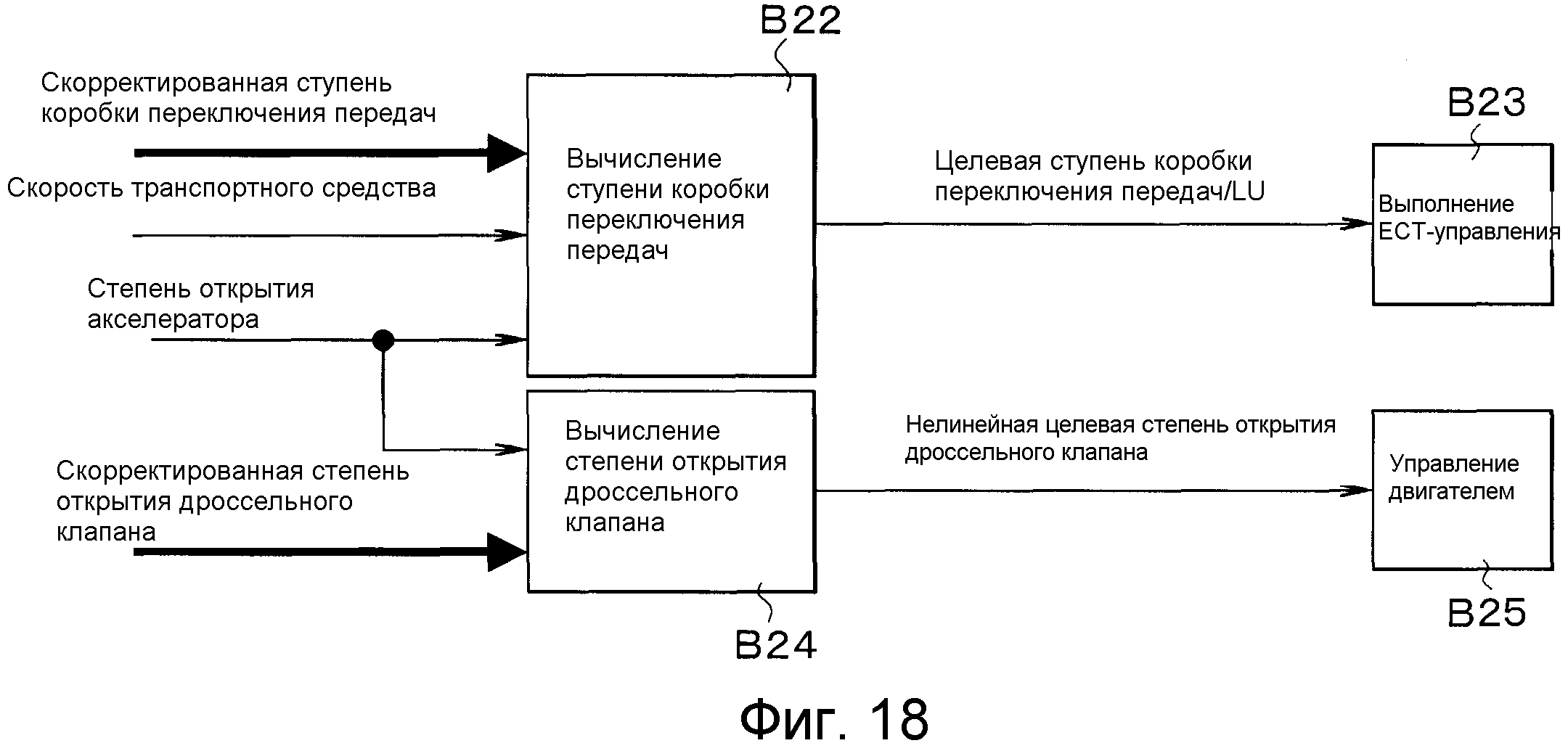
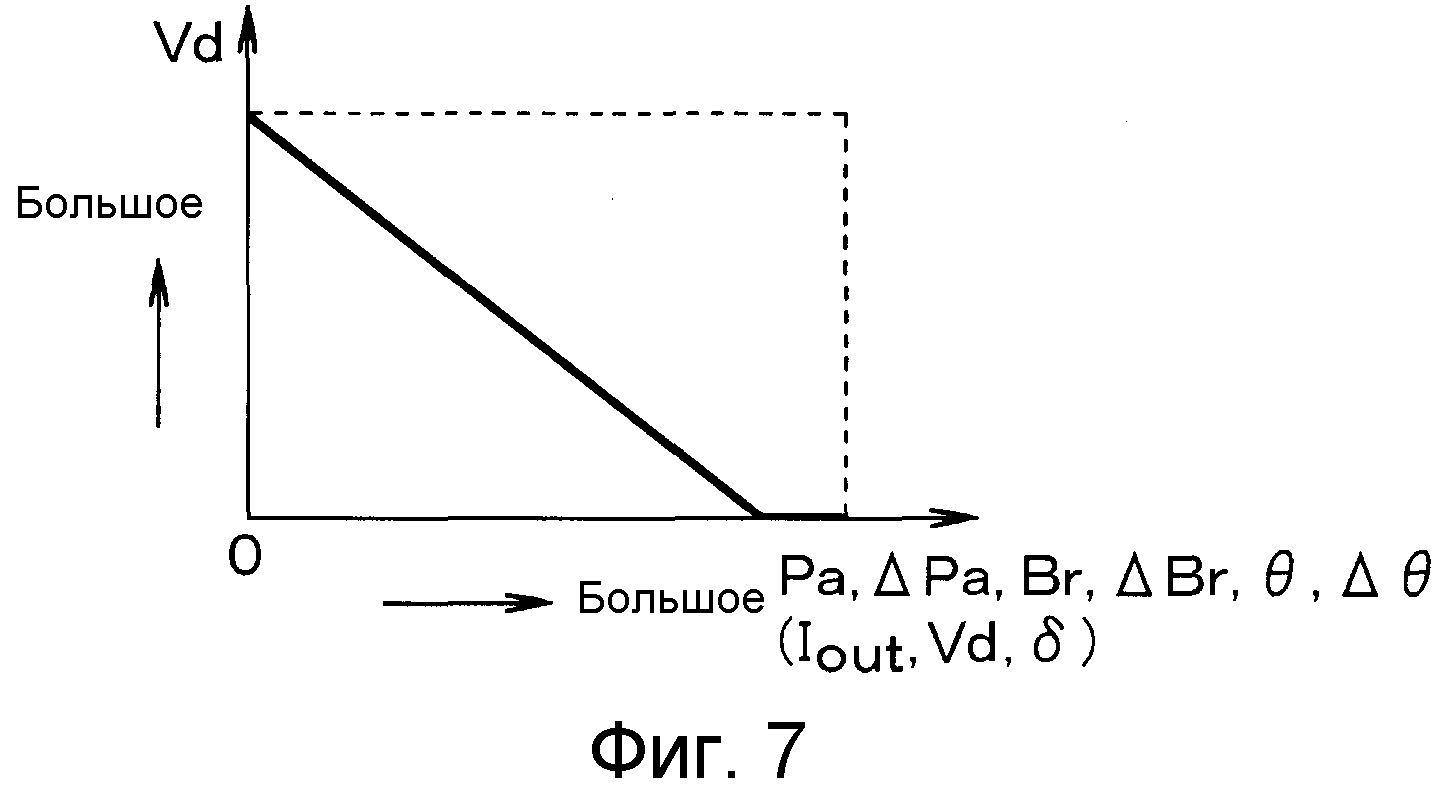
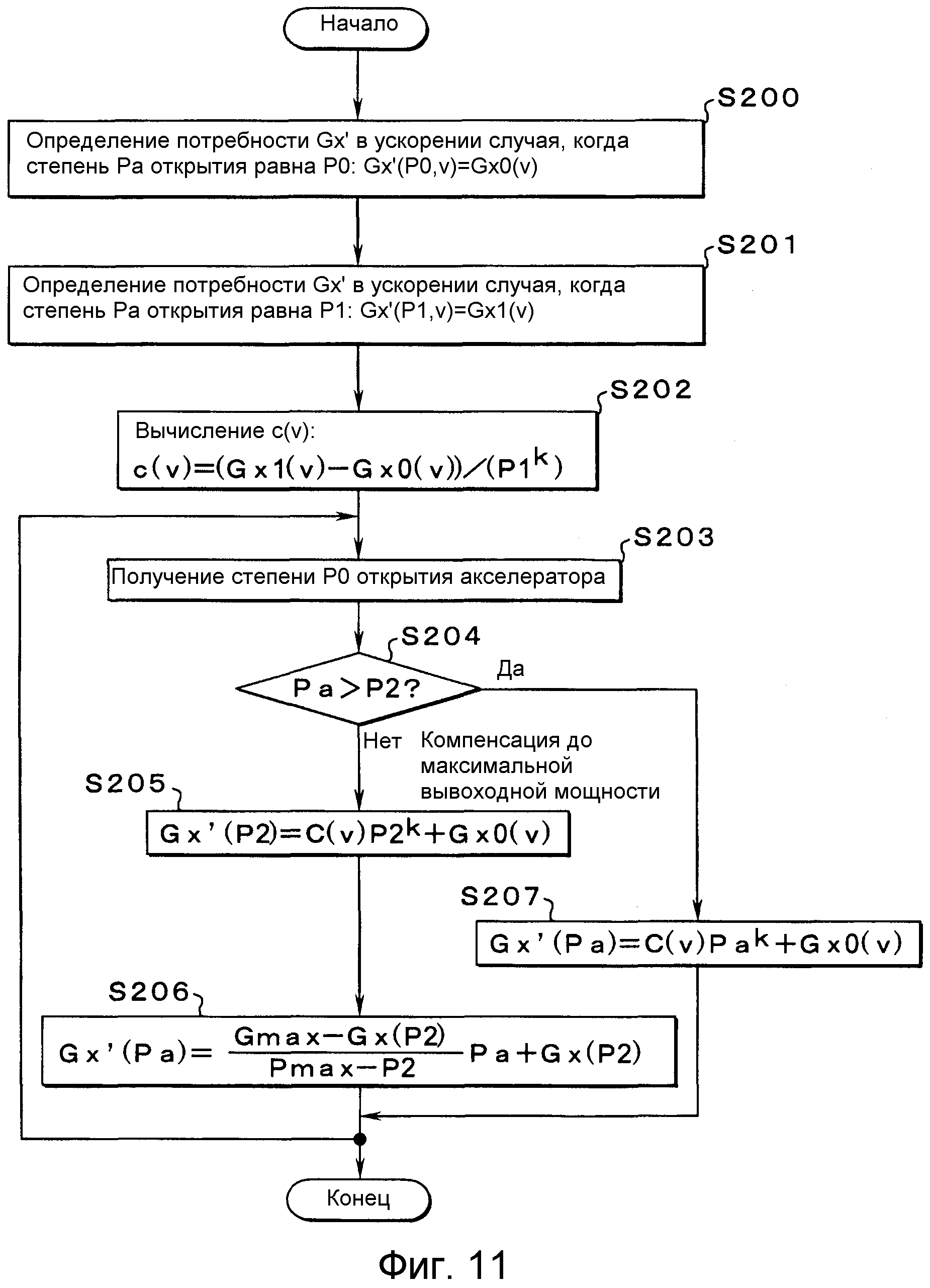
Устройство обработки информации транспортного средства и способ обработки информации транспортного средства
Уплотнительное устройство для гидравлического контура
Система зарядки транспортного средства и способ зарядки транспортного средства
Система управления транспортного средства
Устройство управления автомобилем
Полупроводниковое устройство
Устройство управления для дизельного двигателя с турбонаддувом
Устройство управления и способ управления для безводной аккумуляторной батареи
Устройство помощи при вождении
Дисковое тормозное устройство и суппорт
Устройство очистки выхлопных газов для двигателей внутреннего сгорания
Фазоизменяющее устройство для распределительного вала
Устройство обработки информации транспортного средства и способ обработки информации транспортного средства
Уплотнительное устройство для гидравлического контура
Система зарядки транспортного средства и способ зарядки транспортного средства
Система управления транспортного средства
Устройство управления автомобилем
Полупроводниковое устройство
Устройство управления для дизельного двигателя с турбонаддувом
Устройство управления и способ управления для безводной аккумуляторной батареи

