Результат интеллектуальной деятельности: ОРИЕНТИРУЕМАЯ СТРУКТУРА ТИПА КАТЕТЕРА ИЛИ ЭНДОСКОПА
Вид РИД
Изобретение
Настоящее изобретение касается ориентируемой структуры типа катетера или эндоскопа, предназначенной для обследования изнутри трехмерной системы, такой как турбогенератор (газотурбинный двигатель).
Известные катетеры или эндоскопы выполнены в виде жестких или эластично деформируемых длинных трубок, снабженных поворачивающимся относительно продольной оси концом для выбора определенного угла обзора и облегчения продвижения катетера или эндоскопа.
Для изгибания необходимым образом определенной зоны катетера или эндоскопа известно размещение вдоль его структуры приводных механизмов, выполненных в виде нити из материала с памятью формы, связанных со средством нагрева с помощью теплового действия тока. Эти приводные механизмы сокращаются по длине при повышении температуры, что вызывает изменение кривизны катетера или эндоскопа в зонах, где размещены приводные механизмы. Управление различными приводными механизмами, распределенными по длине эндоскопа или катетера, позволяет позиционировать его дистальный конец в трехмерном пространстве.
Однако такой тип устройства имеет множество недостатков. Диаметр дистального конца составляет обычно от 5 до 8 мм для исключения провисания под действием силы тяжести. Такой большой диаметр конца делает невозможным обследование определенных критических зон. Для получения желаемой угловой ориентации конца катетера или эндоскопа необходимо изменять такие параметры, как длина и диаметр нитей приводного механизма, что является длительным и сложным. Существующие устройства имеют также ограничения, вызванные, в основном, отсутствием подвижности и маневренности в геометрически сложных или тесных пространствах. Действительно, в процессе сокращения провода локальный изгиб устройства имеет практически постоянный радиус кривизны, так как жесткость устройства является практически постоянной по всей длине. Поэтому невозможно обследовать трехмерные сложные полости, имеющие проходы уменьшенных размеров и требующие различных последовательных изменений ориентаций.
Отсюда следует, что некоторые зоны машины остаются недоступными, когда необходимо осуществить классический неразрушающий контроль, например, вихревыми токами или ультразвуком, вследствие сложности доступа и малых размеров проходов. Наконец, известные устройства не являются автоматически управляемыми, что еще более усложняет процедуру обследования, которое должно осуществляться вручную.
Задачей настоящего изобретения является создание структуры типа катетера или эндоскопа, в которой исключены недостатки известного уровня техники простым, эффективным и экономичным образом, и которая позволяет проникнуть в части системы, недоступные для известных средств.
Для этого согласно изобретению предложена ориентируемая структура типа катетера или эндоскопа, предназначенная для наблюдения или обработки скрытого объекта, способная пройти через узкий и/или извилистый проход, содержащая эластично деформируемый продольный корпус, содержащий, по меньшей мере, один приводной механизм из материала с памятью формы, встроенного вдоль продольного корпуса, а также средства нагрева, позволяющие сокращать в продольном направлении приводной механизм для изгиба продольного корпуса, характеризующаяся тем, что приводной механизм размещен, по меньшей мере, на части продольного корпуса с изменяемой жесткостью.
Согласно изобретению изменяемая жесткость продольного корпуса обеспечивает, таким образом, малый изгиб в зонах, где жесткость является значительной, и больший изгиб в зонах с меньшей жесткостью, что позволяет получить профиль кривизны структуры с изменяемыми вдоль структуры радиусами кривизны.
Адаптируя жесткость части структуры, несущей приводной механизм для получения желаемой кривизны, можно получить необходимую угловую ориентацию дистального конца структуры более просто и более точно, чем в известном уровне техники.
В соответствии с другой характеристикой изобретения часть структуры с изменяемой жесткостью содержит, по меньшей мере, один гонт (пластину, имеющую клинообразное сечение) по толщине материала, что позволяет повысить жесткость в этой зоне по сравнению с зонами без гонтов и создать профиль с радиусом кривизны, изменяемым в процессе сокращения приводного механизма.
Изменяемая жесткость продольного корпуса может быть предназначена для обеспечения путем сокращения приводного механизма изменения и/или инверсии продольной или поперечной кривизны продольного корпуса.
Продольный корпус и гонт могут быть выполнены из похожих материалов, таких как, один или несколько полимеров.
В варианте осуществления продольный корпус содержит, по меньшей мере, одну трубку диаметром около от 2 до 6 мм, при этом приводной механизм продольно расположен на внутренней или внешней стенке трубки, по меньшей мере, на части ее длины.
В другом варианте осуществления продольный корпус содержит ленту с удлиненным поперечным сечением, при этом два параллельных приводных механизма встроены в ленту и размещены вдоль одной продольной поверхности ленты. Лента может иметь толщину около от 1 до 2 мм при ширине примерно в 1 см и длине около от 5 до 10 см.
В таких системах, как газотурбинные двигатели, обследуемые зоны имеют строгую аксиальную симметрию. Исходя из этого, проходы, по которым должна проникать структура, имеют часто сечения малой толщины, но большой ширины, так что можно предусмотреть использование структур с удлиненным поперечным сечением, например, прямоугольным. Использование структуры такой формы позволяет обеспечить проход дополнительных инструментов, таких как пинцеты, оптические волокна, различные соединители, в каналах, продольно проходящих в структуре.
Кроме того, структура с удлиненным поперечным сечением оказывает большее сопротивление поперечным нагрузкам, прикладываемым в направлении большего размера этого сечения.
Число приводных механизмов также может быть увеличено при наличии большего свободного пространства в поперечном сечении заданной структуры, что позволяет улучшить контроль кривизны.
Приводной механизм, используемый для изгибания эндоскопа, может быть выполнен в виде нити из сплава титана и никеля, диаметр которой составляет от 0,1 до 0,5 миллиметра.
В общем, для приводных механизмов можно использовать материалы, имеющие свойство сокращаться и уменьшать свою длину при нагреве, и, в частности, такие, которые называются материалами с памятью формы.
В соответствии с другой характеристикой изобретения, структура является структурой телескопического типа и содержит несколько эластично деформируемых корпусов, снабженных приводными механизмами и вставленных один в другой.
Предпочтительно, структура содержит на своем дистальном конце упругое средство для реализации продольной силы давления, связанное с головкой, служащей средством неразрушающего контроля.
В такой конфигурации дистальный конец структуры связан с эластичным корпусом не жестко, а с помощью толкателей, позволяющих обеспечить постоянный контакт между поверхностью исследуемой детали и средствами неразрушающего контроля, которые несет головка структуры.
Средство неразрушающего контроля может быть выполнено в виде спиральных пружин, некоторые из которых изготовлены из сокращающегося материала и связаны со средством электронагрева.
Использование пружин из сокращающегося материала позволяет изменять коэффициент упругости пружины для лучшего регулирования давления, оказываемого на поверхность исследуемой детали.
В качестве средств неразрушающего контроля могут использоваться зонды на вихревых токах или, например, ультразвуковые зонды.
Поперечный размер структуры может изменяться от около 8 мм на ближнем конце и до 1 мм на дистальном конце. Эта структура может также содержать средства зацепления или упора в неподвижные элементы исследуемого объекта.
Действительно, продвижение структуры внутрь системы, осуществляемое последовательными корпусами многих отдельных ориентируемых структур, приводной механизм к перемещению ее дистального конца путем изгиба структуры. Средства соединения или упора позволяют, таким образом, точно позиционироваться на неподвижных промежуточных элементах для уменьшения действия силы тяжести на структуру и улучшения контроля позиционирования и ориентации ее конца. Это позволяет также изготавливать структуры типа катетера или эндоскопа более длинными и более тонкими.
Средства электропитания приводных механизмов, вызывающие нагрев, могут управляться автоматически, что позволяет в случае системы с известной геометрией, осуществлять перемещение структуры внутри исследуемой системы автоматически и, таким образом, избавиться от многих трудностей, присущих непрерывному контролю приводных механизмов на базе сокращающегося материала.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
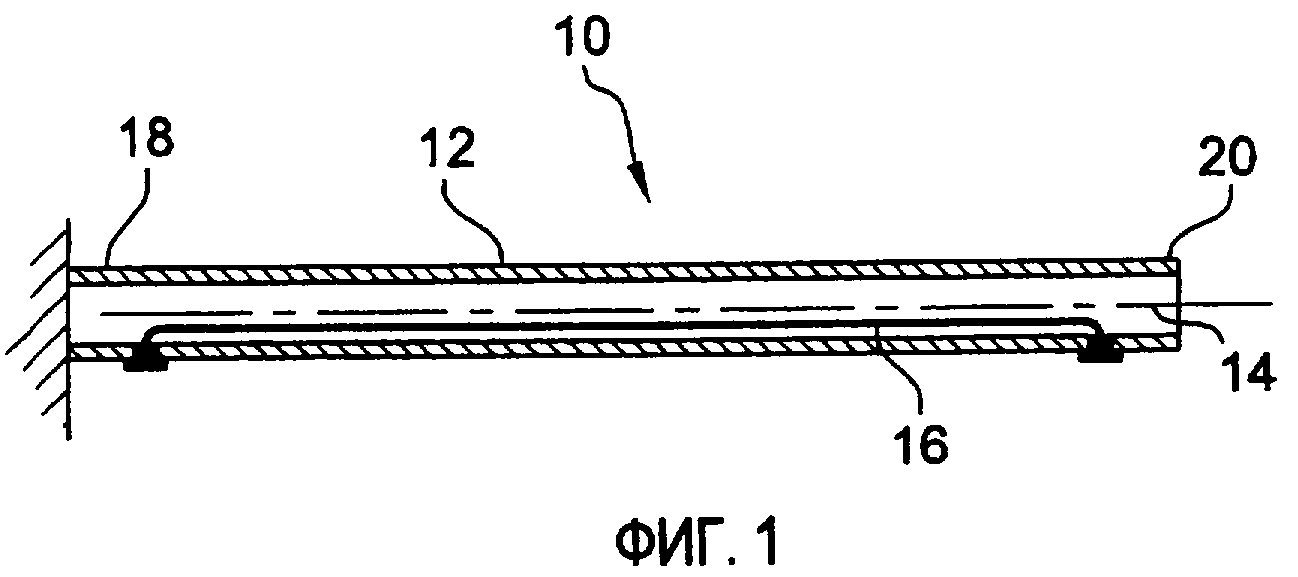
фиг.1 изображает вид в аксиальном разрезе трубчатой ориентируемой структуры, содержащей приводной механизм из сокращающегося материала в соответствии с известным уровнем техники;
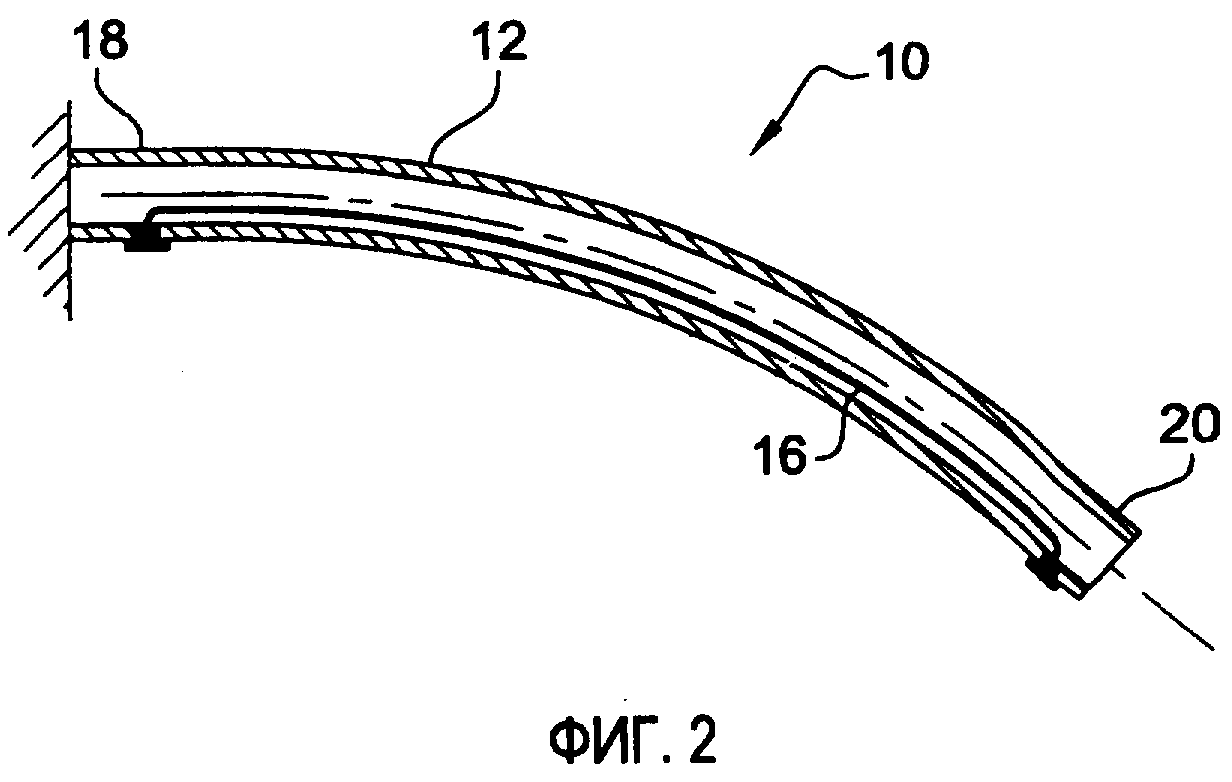
фиг.2 - вид в аксиальном разрезе структуры на фиг.1, изогнутой вследствие нагрева сокращающегося материала;
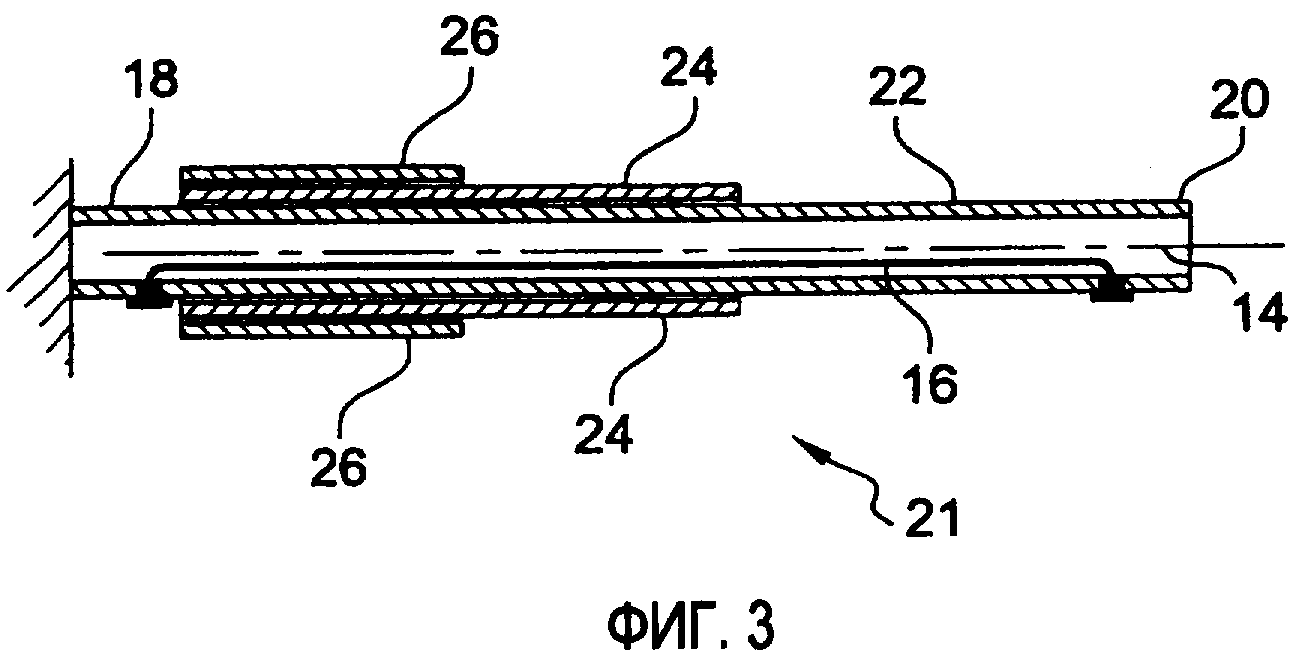
фиг.3 - вид в аксиальном разрезе трубчатой ориентируемой структуры с изменяемой жесткостью, согласно изобретению;
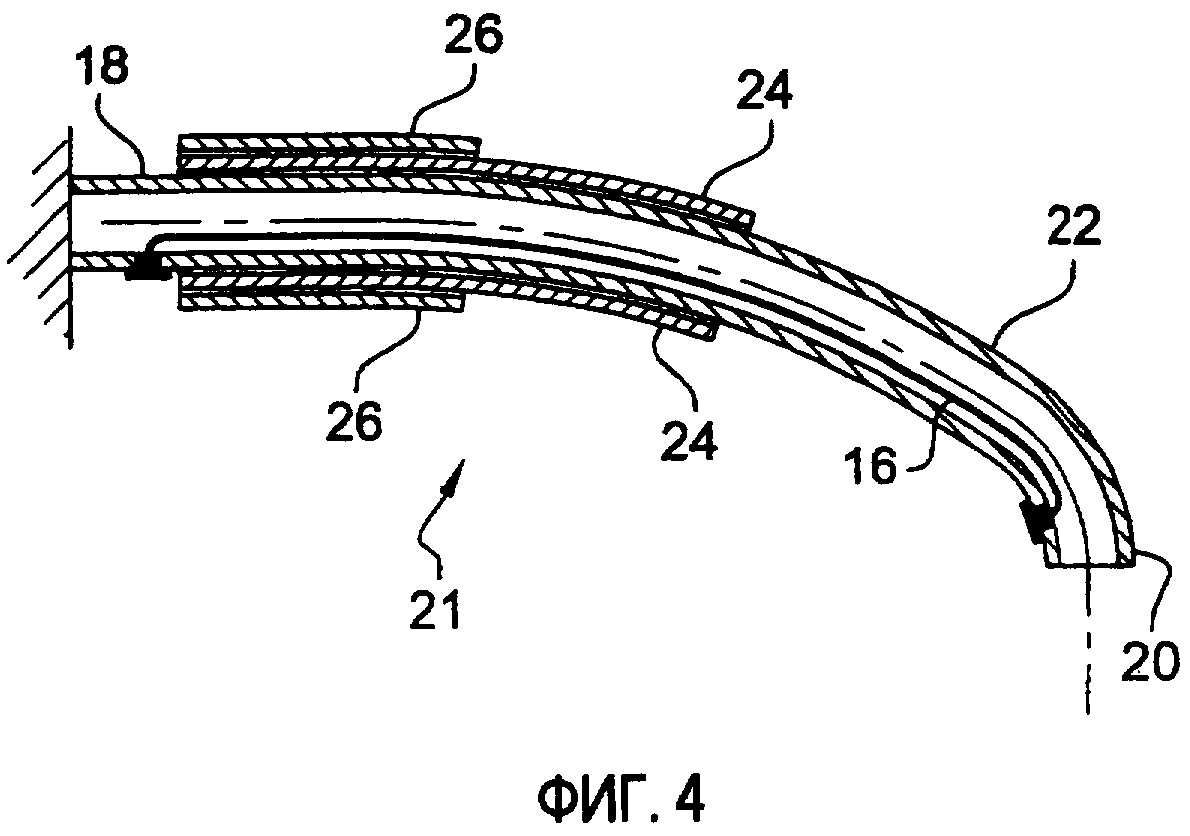
фиг.4 - вид трубчатой структуры на фиг.3, изогнутой вследствие нагрева сокращающегося материала, согласно изобретению;
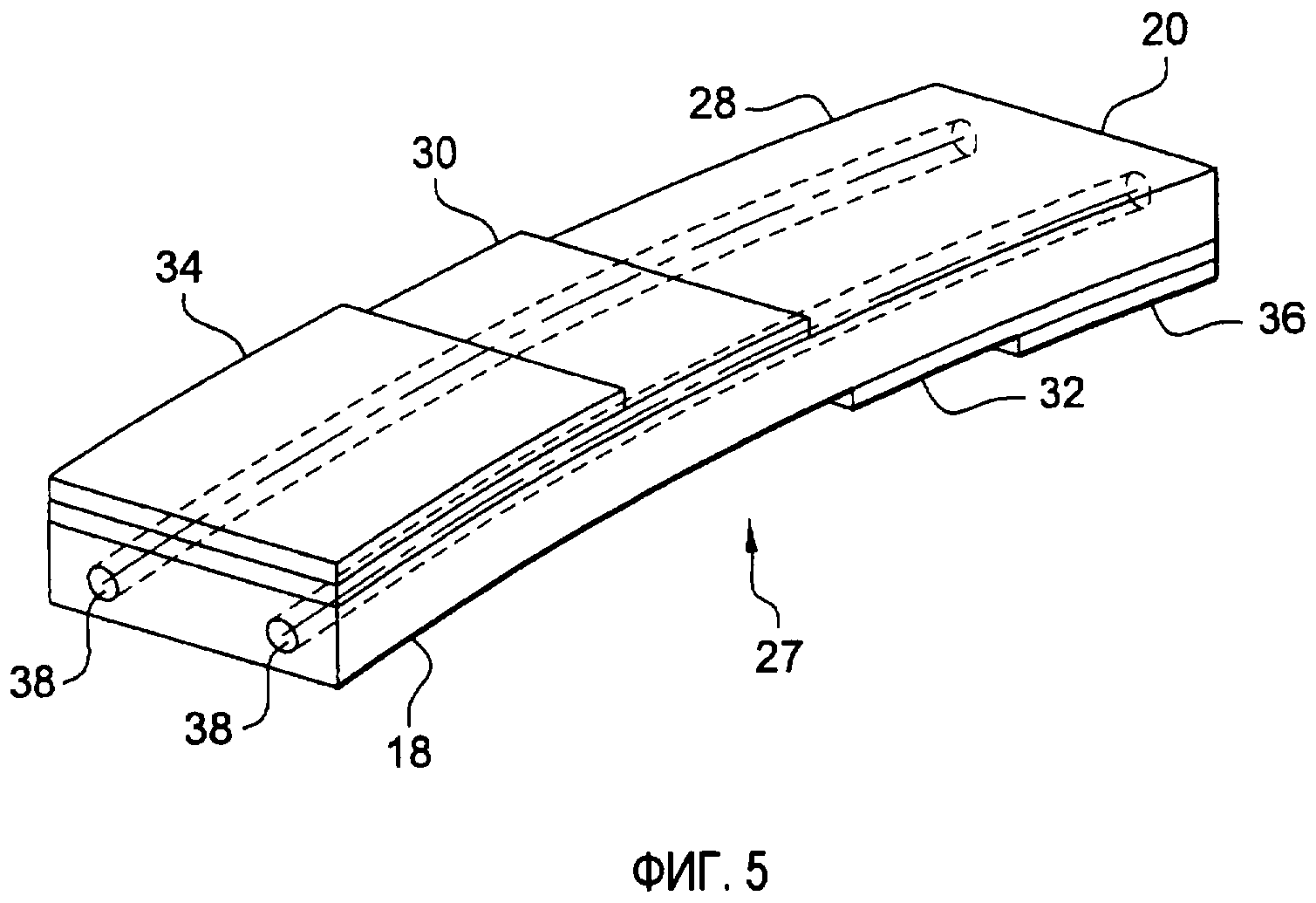
фиг.5 - общий вид структуры с удлиненным поперечным сечением и изменяемой жесткостью, согласно изобретению;
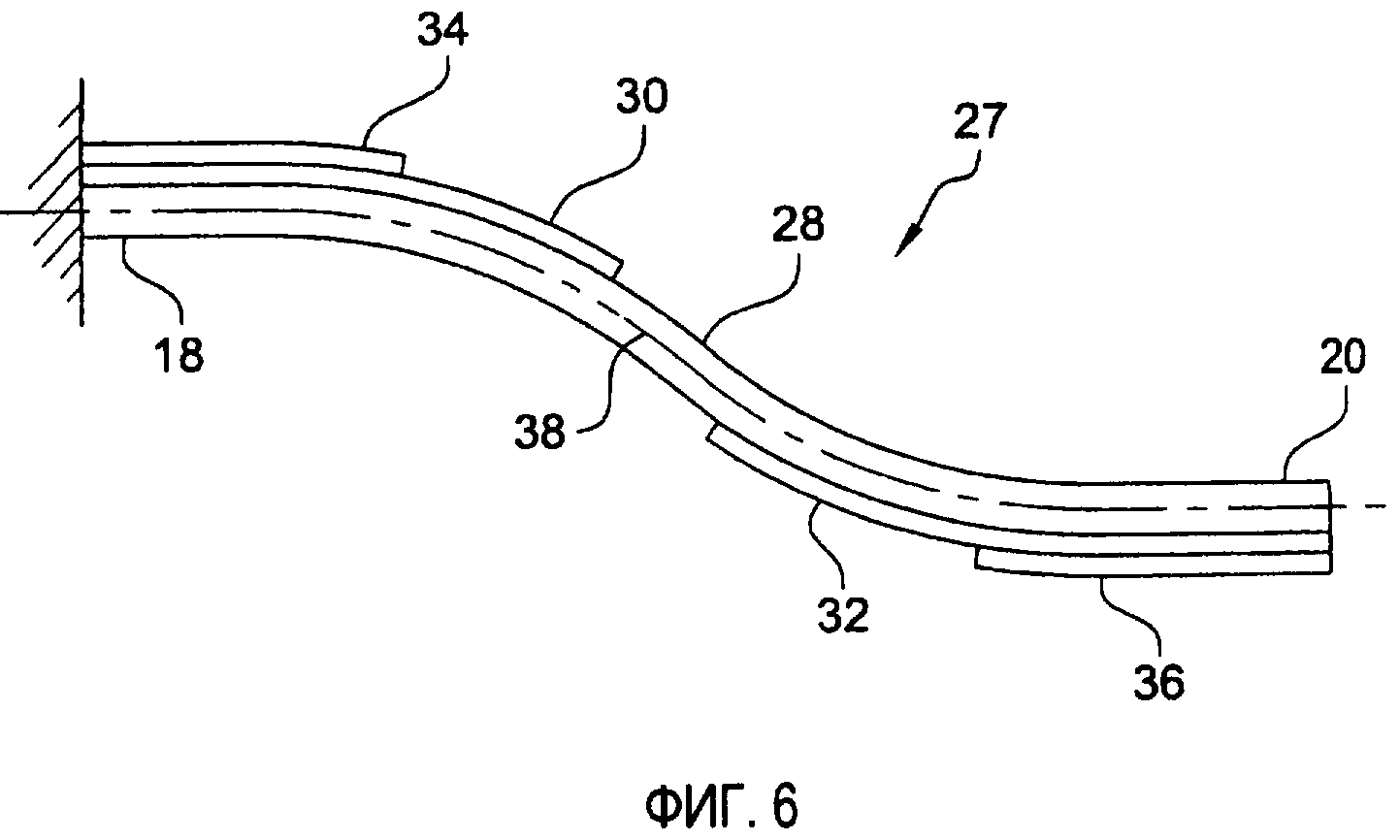
фиг.6 - вид структуры на фиг.5, изогнутой вследствие нагрева сокращающегося материала, согласно изобретению;
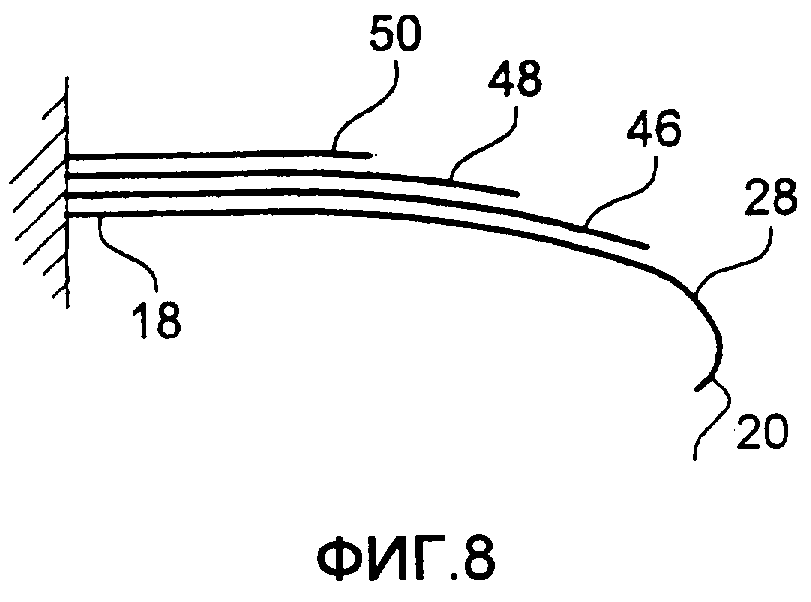
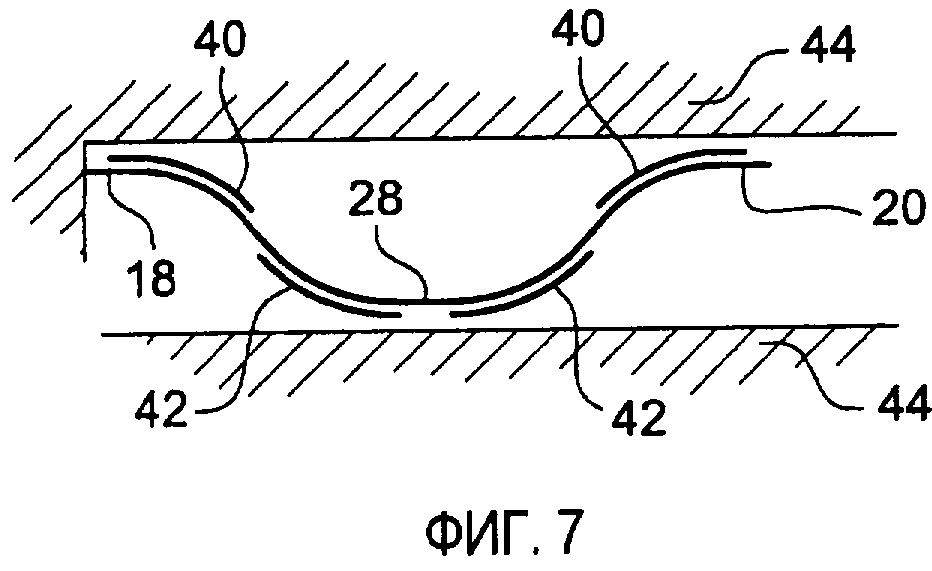
фиг.7 и 8 - виды в аксиальном разрезе «S»-образно изогнутой структуры и крючкообразно изогнутой структуры, согласно изобретению;
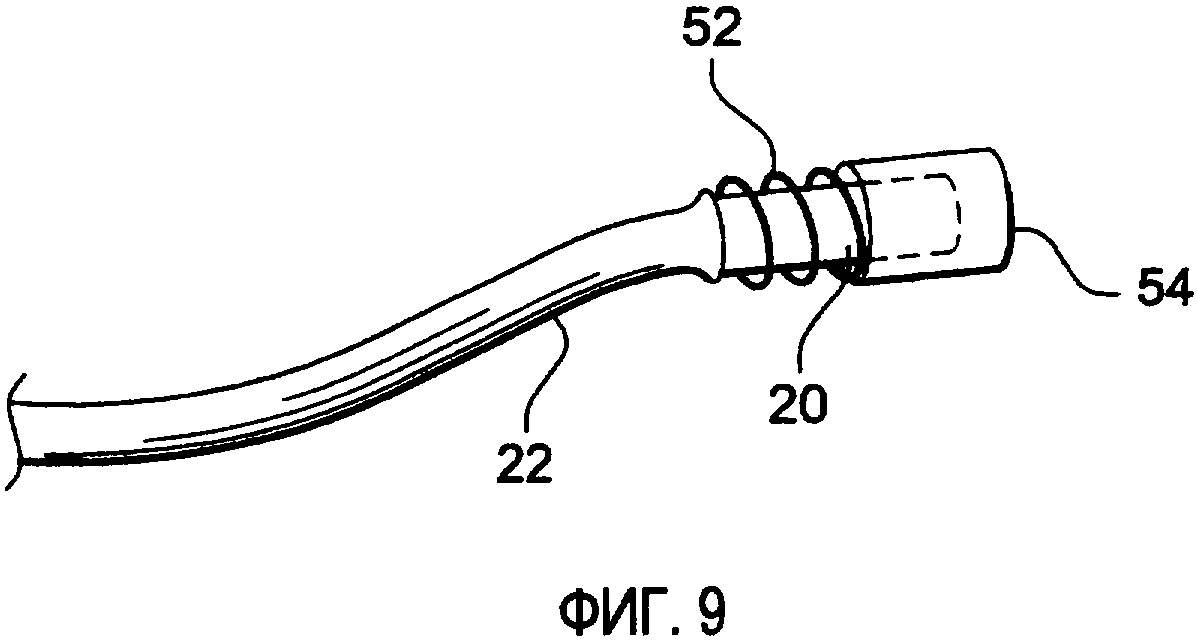
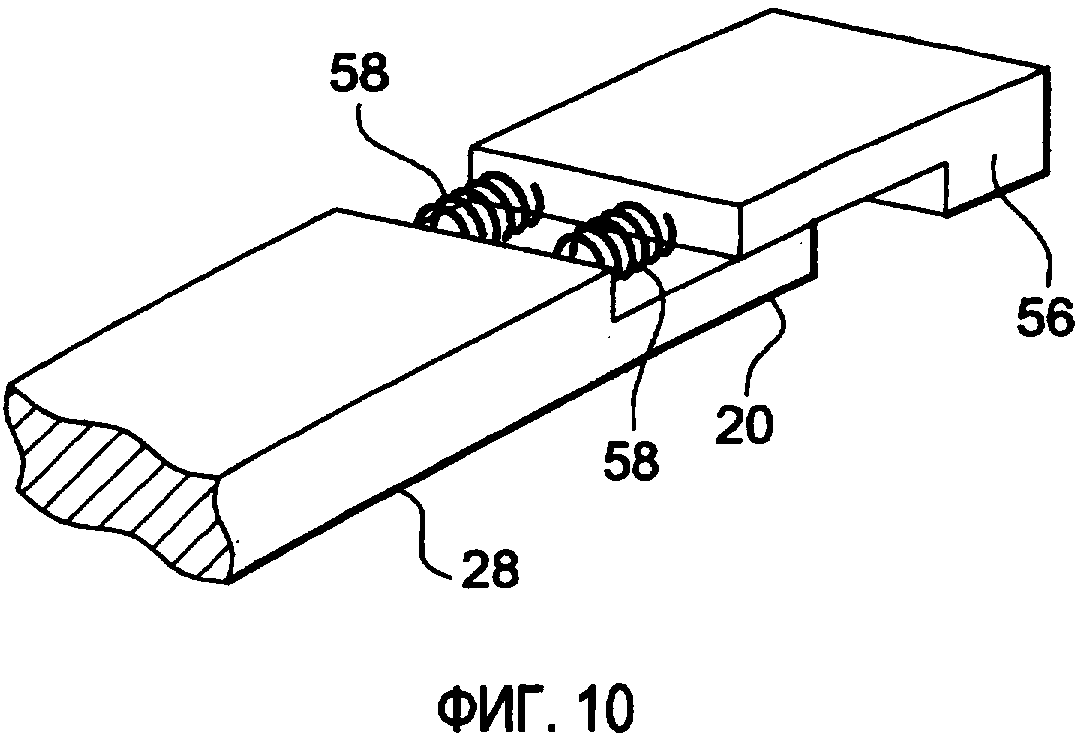
фиг.9 и 10 - общие виды структуры, содержащие толкающие пружины на их дистальных концах, согласно изобретению;
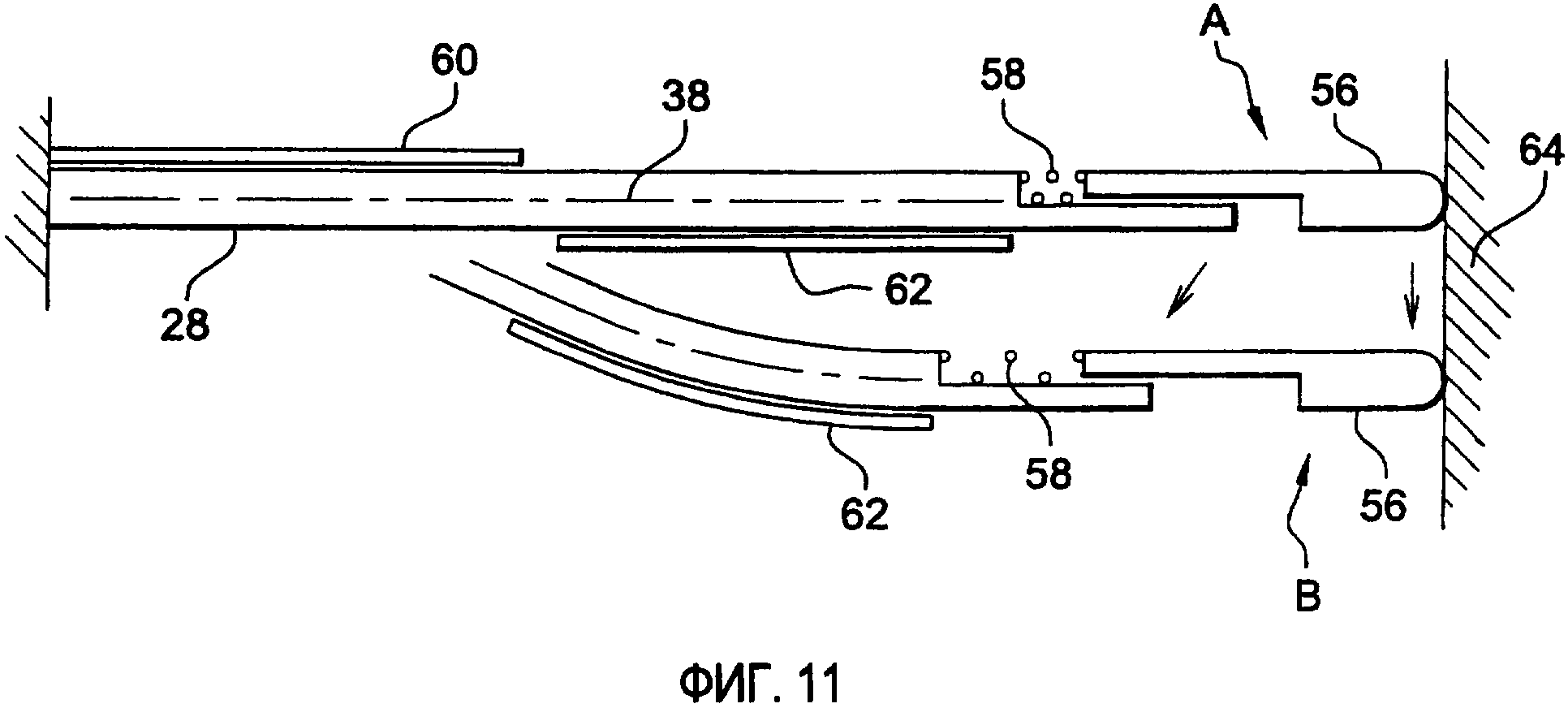
фиг.11 - вид в аксиальном разрезе ориентируемой структуры с изменяемой жесткостью, дистальный конец которой содержит толкающие пружины, согласно изобретению;
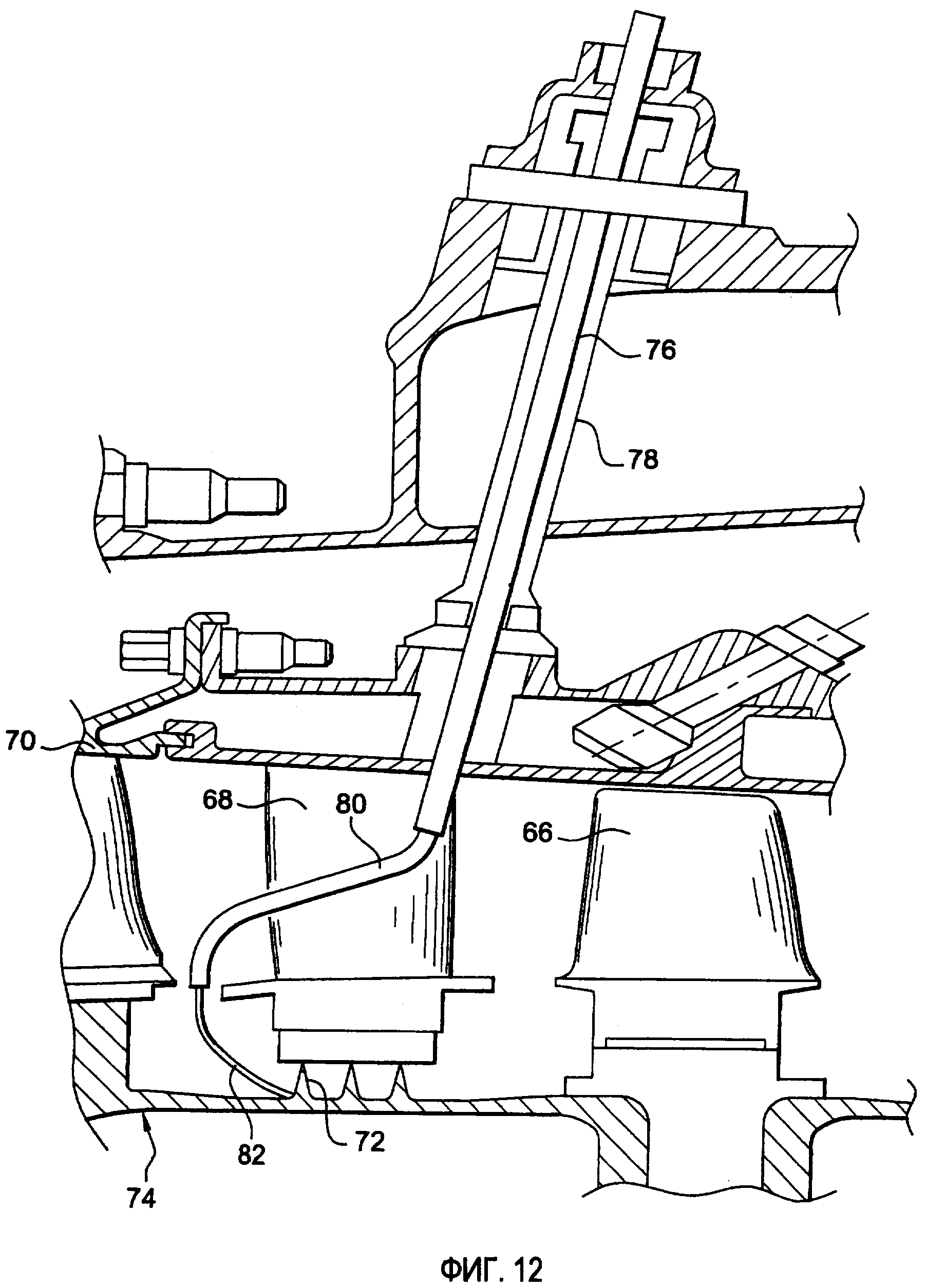
фиг.12 - вид в аксиальном разрезе части турбогенератора (газотурбинного двигателя), предназначенной для исследования с помощью ориентируемой структуры, согласно изобретению.
На фиг.1 схематически изображена известная ориентируемая структура 10 типа катетера или эндоскопа, содержащая гибкий трубчатый корпус 12 с продольной осью 14, включающий приводной механизм 16 из сокращающегося материала, например, типа материала с памятью формы (далее называемый AMF), размещенный вдоль и внутри трубчатой структуры. Приводной механизм 16 выполнен в виде нити, связанной со средствами электропитания (не показаны). Ориентируемая структура 10 содержит фиксированный ближний конец 18 и ориентируемый дистальный конец 20.
Нагрев под тепловым действием тока нити AMF вызывает перегруппировку атомов, образующих нить (когда температура повышается), приводящую к сокращению (со временем отклика менее одной секунды) и уменьшению ее длины. Нить 16, закрепленная на стенке трубки 12, вызывает изгиб дистального конца 20 в направлении, перпендикулярном оси 14 (фиг.2). Изогнутая структура 10 принимает профиль дуги окружности с радиусом кривизны, практически постоянным при измерении, и практически постоянной жесткостью вдоль трубки 12. Такой катетер позволяет осуществить угловую ориентацию дистального конца 20 только на несколько градусов вокруг продольной оси 14, что ограничивает относительную боковую ориентацию между двумя концами 18, 20 катетера. Более значительное изменение угловой ориентации вызывает увеличение бокового перемещения дистального конца 20 катетера. Таким образом, такая структура может быть использована только в системах с узкими проходами и небольшими угловыми смещениями или в системах, имеющих достаточно большие проходы для обеспечения значительного бокового отклонения, что представляет собой большое ограничение при внутреннем обследовании очень сложных систем с малыми внутренними объемами, которые существуют, например, в самолетостроении.
Прекращение теплового действия тока на нить вызывает охлаждение нити 16 и возврат в первоначальное продольное состояние структуры 10 вследствие упругости.
В соответствии с изобретением, как показано на фиг. 3, структура 21 содержит гибкий корпус 22, содержащий, по меньшей мере, одну часть с изменяемой жесткостью, в которой размещена нить 16 AMF. Изменение жесткости обеспечивается путем размещения или формирования супергонтов (длинных тонких пластин) материала на внешней поверхности трубки 22. В представленном примере первый гонт 24 из материала размещен вокруг трубки 22, затем второй гонт 26 меньшего аксиального размера, чем первый, размещен вокруг первого гонта 24. Таким образом, гибкий корпус имеет уменьшающуюся жесткость от ближнего конца 18 к дистальному концу 20.
При сокращении нити 16 при тепловом нагреве трубка изгибается с изменяемым радиусом кривизны (фиг.4). Действительно, трубка слабо изгибается в части с большой жесткостью и сильнее изгибается в зоне с малой жесткостью. Таким образом, ясно, что боковое отклонение является меньшим и, следовательно, габаритные размеры уменьшаются по сравнению с известным уровнем техники для одинаковой угловой ориентации дистального конца 20.
Таким образом, возможно получение изменений ориентации дистального конца, достигающих 90º относительно продольной оси 14 при малом боковом отклонении. Это реализуется в случае, когда диаметр трубки 22 не превышает значительно размеры нити 16 AMF.
Обычно диаметр нити 16 составляет около от 0,5 до 0,1 миллиметра и ее продольное сокращение, получаемое при тепловом воздействии тока (при электрической мощности 0,5 Ватта), составляет от 5 до 6% ее длины. Трубка 22 имеет диаметр от 2 до 6 миллиметров и выполнена из такого же полимерного материала, как и существующие медицинские катетеры. Регулировка мощности электрического тока, поступающего в приводные механизмы, позволяет, таким образом, регулировать сокращение и, как следствие, искривление корпуса 22.
Проходы, по которым перемещаются эндоскопы или катетеры для обследования машин имеют часто форму узких прорезей, в частности в аксиально-симметричных системах, таких как газотурбинные двигатели. Таким образом, нет необходимости, чтобы катетер был трубчатым, он может иметь другую форму. Изобретение касается также гибкого продольного корпуса 28 с удлиненным поперечным сечением, как представлено на фиг. 5, где корпус 28 выполнен в форме ленты практически прямоугольного сечения.
В предыдущем варианте осуществления катетер 27 имеет гибкий корпус 28, содержащий слои материала для изменения жесткости ленты в продольном направлении. Эти дополнительные слои материала образованы лентами также прямоугольного сечения. Структура содержит в данном случае четыре слоя материала или дополнительных лент шириной, равной ширине корпуса 28. Первая лента 30 размещена на поверхности корпуса 28, в то время как другая лента 32 той же длины, что и первая, размещена на противоположной стороне на другом конце продольного корпуса 28. Две другие ленты 34, 36 той же длины размещены соответственно на каждой из двух первых лент 30, 32 и имеют длины, меньшие длин лент 30 и 32.
Две параллельных сокращающихся нити 38 (фиг.5) или AMF встроены в ленту 28 и размещены параллельно ее продольным поверхностям в средней плоскости. Вследствие нагрева нитей 38 посредством теплового действия тока получают изогнутую в форме «S» (фиг.6) структуру, так как от ближнего конца 18 до дистального конца 20 продольного корпуса жесткость уменьшается, затем остается постоянной на одной поверхности ленты 28, или на другой поверхности. Такая структура может быть особенно полезна тогда, когда речь идет о смещении дистального конца 20 перпендикулярно продольной оси без изменения угловой ориентации или, в общем, когда надо не только изменить кривизну продольного корпуса, но также инвертировать его в определенной зоне.
Структура на фиг.7 имеет форму «ванночки». Такая форма может быть получена воздействием пластинки 40 (гонта) гибкого корпуса 28 на каждом из своих концов, при этом обе пластинки 40 размещены на одной поверхности, в то время как противоположная поверхность имеет две пластинки 42, вытянутые вдоль корпуса 28 и размещенные между концами пластин 40. Такой тип структуры может быть использован для повышения устойчивости эндоскопа или катетера посредством его упора в неподвижные окружающие элементы 44, что уменьшает действие силы тяжести на комплекс структуры и позволяет использовать более длинные и более тонкие катетеры, чем, если бы они были образованы только самонесущими структурами. Средства зацепления и упора могут также оказаться особенно полезными при выполнении неразрушающего контроля, описанного далее, который требует стабильного положения дистального конца 20 катетера.
Структура в форме «крючка» на фиг.8 может быть получена при использовании трех слоев материала 46, 48, 50 различной длины, наложенных один на другой на одну и ту же поверхность корпуса 28. Таким образом, ближайший конец 18 продольного корпуса 28 испытывает только слабый изгиб, в то время как большая часть изгиба сконцентрирована на дистальном конце 20, что позволяет получить угловое перемещение дистального конца 20, которое может превышать 90º при сохранении небольшого бокового смещения.
Как изображено на фиг.9 и 10, катетеры и эндоскопы могут содержать упругие средства, оказывающие продольное толкающее усилие на головку, снабженную средствами неразрушающего контроля. Этими упругими средствами могут являться, например, спиральные пружины.
В случае эндоскопа или трубчатого катетера (фиг.9) спиральная пружина намотана на дистальный конец 20 гибкого корпуса 22 и упирается в реборду продольного корпуса 22, при этом другой конец пружины 52 упирается в дно элемента в форме колпачка 54, окружающего пружину 52.
В случае, когда гибкий корпус 28 (фиг.10) имеет удлиненное поперечное сечение, например, прямоугольное, его дистальный конец 20 может содержать прямоугольный уступ, на котором перемещается головка 56 дополняющей формы. Головка 56 связана с продольным корпусом 28 двумя пружинами 58, размещенными параллельно.
Когда катетер подводится к поверхности исследуемой детали, пружины 52, 58 позволяют удерживать головку 54, 56 в контакте с поверхностью в течение времени, необходимого для обследования детали с помощью средств неразрушающего контроля.
Пружины 52, 58 могут быть выполнены из сокращающегося материала или материала с памятью формы в случае, когда оказывается необходимым контроль жесткости пружины или приложенной силы. Такие пружины могут также с высокой точностью обеспечивать контроль расстояния между концом головки и поверхностью.
На Фиг.11 показаны два положения катетера или эндоскопа согласно изобретению, при этом первое (А) положение соответствует первоначальному состоянию перед упругой деформацией, и второе (В) положение соответствует состоянию после упругой деформации. Катетер использован с удлиненным поперечным сечением и содержит два слоя 60, 62 материала, размещенных на противоположных сторонах концов гибкого корпуса 28, и две нити 38 AMF (фиг.5), а также одну или несколько пружин 58, связывающих головку 56 с гибким корпусом 28, при этом головка 56 находится в контакте с поверхностью обследуемой детали 64.
При нагреве путем теплового воздействия тока катетер принимает «S»-образную форму в соответствии с принципом, описанным выше, что обеспечивает смещение дистального конца перпендикулярно продольной оси без изменения его ориентации. Одна или несколько пружин 58 обеспечивает удержание головки в постоянном контакте с поверхностью детали 64.
Благодаря такому устройству и размещению средств неразрушающего контроля на уровне головки 56, возможно обеспечить исследование посредством сканирования внутри детали 64, осуществляя прямоугольное перемещение головки 56 путем повторяющегося воздействия нитями 38 AMF.
Средства неразрушающего контроля, такие как зонды на вихревых токах или ультразвуковые зонды, могут оказаться особенно полезными при определении трещин поверхностей.
На фиг.12 представлена ступень газотурбинного двигателя, содержащая размещенные попеременно подвижные лопатки 66 и неподвижные лопатки 68, окруженные внешним кожухом 70. Неподвижные лопатки 68 имеют радиально внутренние концы, удлиненные остроконечные выступы 72, выполненные на части ротора 74. Остроконечные выступы 72 позволяют исключить любую циркуляцию воздуха между неподвижной лопаткой 68 и ротором 74. Таким образом, является важным контроль состояния износа этих деталей для исключения любого ухудшения эксплуатационных характеристик газотурбинного двигателя.
Используемые для этого катетеры или эндоскопы выполнены телескопическими, то есть они образованы множеством эластично деформируемых корпусов, снабженных сокращающимися приводными механизмами и входящими один в другой.
Катетер согласно изобретению позволяет быстро и просто контролировать остроконечные выступы 72. Для этого первый жесткий трубчатый корпус 76 вводится в эндоскопическое отверстие 78, выполненное между двумя соседними неподвижными лопатками 68, и второй гибкий корпус 80 «S»-образной формы вводится внутрь первого корпуса. Средства нагрева позволяют обеспечить форму катетеру 80 в пространстве между двумя неподвижными лопатками 68. Наконец, третий гибкий корпус 82, имеющий единственное направление изгиба, вводится внутрь первых двух катетеров 78, 80 и управляется таким образом, что его головка может контактировать с остроконечным выступом 72. Ротор газотурбинного двигателя приводится затем во вращение, что позволяет, благодаря средствам неразрушающего контроля, размещенным на уровне головки катетера 82, исследовать состояние поверхности детали по 360º. Головка может быть связана с пружиной, как было описано выше, для обеспечения постоянного контакта.
Общая длина катетера является относительно значительной, например, около 60 сантиметров, и может вызывать ошибки позиционирования своего дистального конца. Можно использовать неподвижные лопатки 68 в качестве точек опоры и зацепления промежуточного катетера 80 с помощью таких элементов, как зажимы или развернутые решетки для стабилизации комплекса телескопического катетера.
Конструкция с изменяемой жесткостью позволяет проникать катетеру до трудно достигаемых зон, которые требуют его введения в проходы малых размеров.
Катетеры с удлиненным поперечным сечением могут быть сплошными, как представлено на чертежах, или полыми. В случае сплошных телескопических катетеров можно предусмотреть направляющие средства, такие как рельсы, размещенные вдоль продольных корпусов.
В различных описанных вариантах осуществления можно использовать различное число нитей, сокращающихся или из материала с памятью формы, и различное число слоев гонтов для получения профилей желаемой кривизны.
Изобретение не ограничивается типом приводных механизмов, используемых в вариантах осуществления, изображенных на чертежах, т.е. нитей AMF простого действия, направление действия которых ограничено. Можно также использовать другие приводные механизмы, такие как ленты AMF, обладающие одновременно двумя положениями памяти для получения более быстрого возврата в начальное состояние ориентируемой структуры. Представляется также возможным для получения более быстрого возврата в первоначальное положение размещение нитей AMF вдоль эластичного корпуса и в противоположном направлении и последовательное их включение.
Описанное выше изобретение является особенно полезным в области трехмерного исследования сложных промышленных устройств, оно может использоваться также в других областях, в частности, в биомедицинской области, где маневренность катетеров является ключевой точкой анатомического исследования и удачного функционирования.
Изобретение касается также катетера или эндоскопа, содержащего автоматические средства управления, связанные с каждым из сокращающихся приводных механизмов. Это является особенно интересным в случае систем с хорошо известной геометрией. Используя чертежи системы, можно точно определить путь следования и заданную форму структуры и программировать управление приводными механизмами от начала введения структуры в эндоскопическое отверстие.
В связи с простотой использования и малой стоимостью изобретение обеспечивает изготовление катетеров, предназначенных для исследования систем заданного типа и неразрушающего контроля деталей одного типа.
Можно также оптимизировать изготовление ориентируемой структуры согласно изобретению в зависимости от зоны и типа желаемого неразрушающего контроля, что дает пользователю значительный выигрыш в эксплуатационных характеристиках.
В качестве сокращающегося материала может, например, использоваться сплав титана и никеля. Эластичный корпус, а также слои материала могут быть выполнены из упругой стали или из полимера, такого как полиэтилэфиркетон, эпоксидная смола, полиэтилен или полиуретан, в зависимости от желаемой жесткости.
Изобретение не ограничивается катетерами прямоугольного или круглого сечения и касается также катетеров с любым поперечным сечением, например, овальным, квадратным, треугольным и т.д.
Способ анализа поверхности разрыва детали турбомашины
Шарнирное шаровое устройство для подвески турбомашины к пилону или подвески оборудования к корпусу турбомашины
Способ сборки деталей турбомашины и узел, применяемый при таком способе
Устройство очистки модуля газотурбинного двигателя
Способ и модуль фильтрации грубого заданного значения
Устройство для обработки восковых кластеров
Компрессор газотурбинного двигателя, в частности турбовинтового или турбовентиляторного двигателя самолета
Полая лопатка и соответствующий способ изготовления
Патрубок для отвода дренажных жидкостей для силовой установки
Прогнозирование операций технического обслуживания, применяемых к двигателю
Способ сборки приводного силового гидроцилиндра и приводной силовой гидроцилиндр
Отвинчивающая инструментальная оснастка и способ отвинчивания соединительной гайки
Способ изготовления компонента с истираемым покрытием
Способ и установка для использования вихревых токов для неразрушающего контроля с автоматической калибровкой

