Результат интеллектуальной деятельности: СПОСОБ КАЛИБРОВКИ И ПОВЕРКИ ДОПЛЕРОВСКОГО РАДИОЛОКАТОРА ПРОФИЛЕЙ ВЕТРА
Вид РИД
Изобретение
Предлагаемое изобретение относится к способам калибровки и поверки метеорологических приборов с использованием доплеровского радиолокатора для определения скорости и направления ветра, применяемых как для нужд народного хозяйства, так и для военных целей, например, в артиллерии.
В настоящее время разработан комплекс для беззондового определения параметров атмосферы с использованием доплеровского радиолокатора, но способы калибровки и поверки таких комплексов отсутствуют.
Перед авторами стояла задача разработки способа калибровки и поверки доплеровского радиолокатора профилей ветра с получением результата прямым измерением.
Эта задача решена за счет того, что с доплеровского радиолокатора профилей ветра излучают сигнал определенной частоты на устройство переизлучения сигнала, в котором производят доплеровский сдвиг частоты принятого сигнала, затем переизлучают сигнал скорректированной частоты в доплеровский радиолокатор профилей ветра и получают результат калибровки по скорости и высоте прямым измерением, при этом доплеровский радиолокатор профилей ветра и устройство переизлучения сигнала устанавливают стационарно на различных фиксированных расстояниях друг от друга, а изменение доплеровской частоты переизлучаемого сигнала производят в устройстве переизлучения сигнала по сигналу управления в промежутке между условно фиксированными положениями доплеровского радиолокатора профилей ветра.
Техническим результатом предлагаемого способа является решение задачи калибровки и поверки доплеровского радиолокатора профилей ветра с использованием современных устройств.
Заявляемый способ обладает совокупностью существенных признаков не известных из уровня техники для способов подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Заявляемый способ, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», т.к. для специалистов он явным образом не следует из уровня техники, т.е. не известен из доступных источников научной, технической и патентной информации на дату подачи заявки.
Сущность изобретения поясняется с помощью чертежей, где
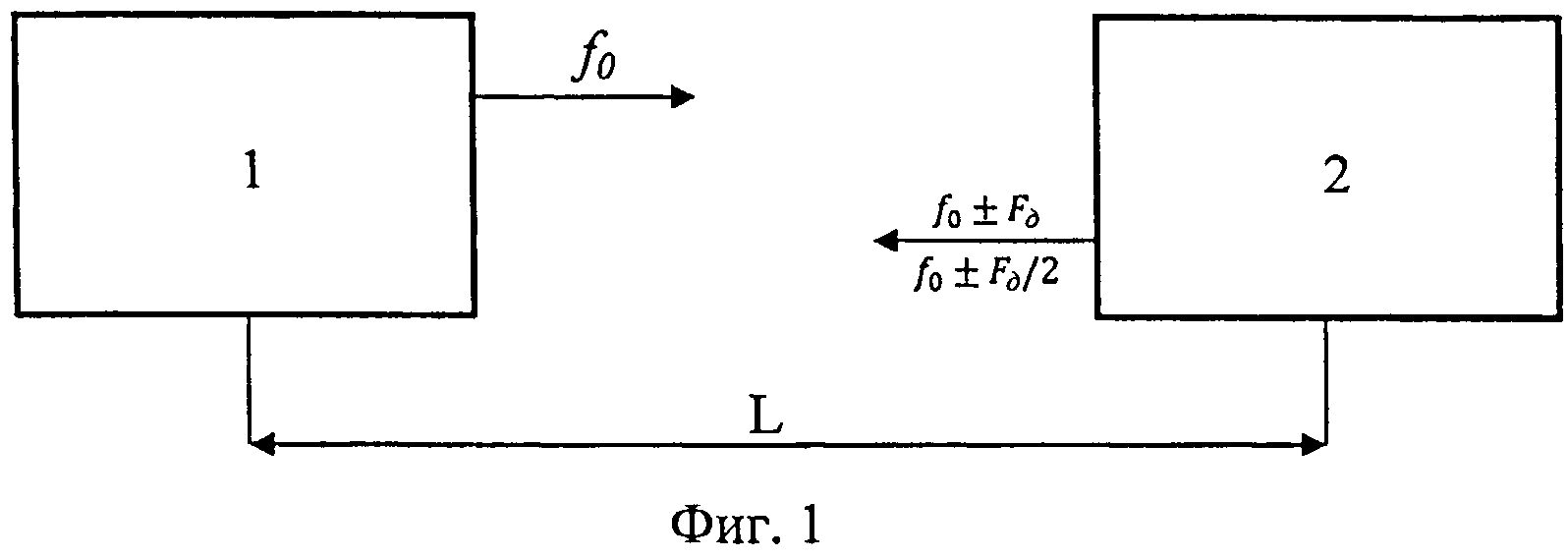
- на фиг.1 приведена блок-схема реализации способа;
- на фиг.2 - диаграмма проекции вектора скорости ветра.
При измерении параметров ветра доплеровским радиолокатором профилей ветра (ДРПВ), зондирующий СВЧ-сигнал направляется в пространство под определенным углом β к горизонту. При этом зондирование атмосферы в одном цикле измерения проводится на азимутальных углах αN (например: 0°, 30°, 60°, 90°, 120°, 150°, 180°, 210°, 240°, 270°, 300°, 330°), на которых в момент зондирования ДРПВ останавливают (метод круговых диаграмм). Скорость ветра при каждой остановке вычисляется по формуле:

FдN - доплеровская частота отраженного от метеообразований атмосферы СВЧ сигнала;
λ - длина волны зондирующего СВЧ сигнала;
αN - азимутальные углы, при которых производится зондирование атмосферы;
αв - угол направления скорости ветра относительно направления на север;
β - угол места, под которым производится зондирование атмосферы (задан конструкцией для ДРПВ; cosβ=const).
Дискретность высот, на которых выдаются значения скорости ветра, определяется длительностью зондирующего импульса τ и равна

с - скорость света.
При калибровке и(или) поверке ДРПВ 1 устанавливают его так, чтобы направлять зондирующий СВЧ-сигнал параллельно земле на специальное устройство 2 переизлучения сигнала (УПС), располагаемое на фиксированном расстоянии L от ДРПВ. При этом УПС переизлучает падающий на него СВЧ-сигнал с доплеровским сдвигом частоты соответствующим СВЧ-сигналу при его отражении от метеообразований, движущихся с определенной скоростью. Принимая этот сигнал, ДРПВ выдает значение скорости ветра, которое соответствует доплеровскому сдвигу частоты, заданному в УПС на высоте (H=Lsin β), соответствующей заданному (фиксированному) расстоянию L.
При данном способе УПС выдает набор переизлучаемых частот с доплеровским сдвигом: ± F; ±0,707 F; ±0,5 F; 0, в соответствии с азимутальными углами 0°, 180°; 30°, 150°, 210°, 330°; 60°, 120°, 240°, 300°; 90°, 270°, на которых имитируют остановку ДРПВ при зондировании атмосферы (ДРПВ при этом не вращается).
Так как при данном способе αв=0 (зондирующий СВЧ сигнал направлен прямо на УПС), то формула (1) принимает вид:

Таким образом, задавая УПС различные FдN и условно останавливая ДРПС на соответствующих углах αN, проверяется точность измерения Vв, a размещая ДРПС и УПС на различных расстояниях друг от друга, проверяется точность измерения высоты, на которой измерялась скорость Vв.
Поскольку для измерения скорости и направления ветра методом «круговых диаграмм» достаточно 3-х доплеровских частот, получаемых с 3-х направлений, то для калибровки ДРПВ хватает четырех доплеровских частот, переизлучаемых УПС, а именно: ± F и ±0,5 F. С помощью этих доплеровских частот имитируют отраженный от неоднородностей атмосферы СВЧ-сигнал, приходящий с 6-ти направлений, а именно:
- с направления 0° - +F;
- с направления 60° - +0,5 F;
- с направления 120° - минус 0,5 F;
- с направления 180° - минус F;
- с направления 240° - минус 0,5 F;
- с направления 300° - +0,5 F, что следует из фиг.2.
Данный способ осуществляют по проверочной программе работы ДРПВ с синхронным управлением устройством переизлучения сигналов с работой ДРПВ.
Наблюдая на экране блока управления и отображения информации (БУОИ - на схеме не показан), входящего в состав ДРПВ, за условным положением ДРПВ подают команду (визуально или по радиосвязи) на переключение доплеровской частоты устройством УПС в соответствующий момент времени - в промежутке между условно фиксированными положениями ДРПВ.
После окончания цикла измерения ДРПВ выдает значения:
- скорости ветра, соответствующей частоте F;
- высоты, на которой «измерялась» скорость ветра, Н=L sinβ;
- направления скорости ветра в зависимости от заданной программой начального положения ДРПВ (направление скорости ветра не калибруется).
На предприятии-заявителе разработана конструкторская документация, в которой реализован предлагаемый способ калибровки и поверки. Практическое использование предложенного способа не вызывает сомнений, т.к. нет необходимости в разработке сложных устройств для реализации, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
Способ калибровки и поверки доплеровского радиолокатора профилей ветра, характеризующийся тем, что с доплеровского радиолокатора профилей ветра излучают сигнал определенной частоты на устройство переизлучения сигнала, в котором производят доплеровский сдвиг частоты принятого сигнала, соответствующий сигналу при его отражении от метеообразования, затем переизлучают сигнал с произведенным доплеровским сдвигом частоты в доплеровский радиолокатор профилей ветра и получают результат калибровки по скорости ветра в соответствии с доплеровским сдвигом частоты, заданным в устройстве переизлучения сигнала, и по высоте, на которой измерялась скорость ветра в соответствии с формулой Н=L sinβ, где β - угол места, под которым производится зондирование атмосферы, L - фиксированное расстояние между устройством переизлучения сигнала и доплеровским радиолокатором профилей ветра, при этом доплеровский радиолокатор профилей ветра и устройство переизлучения сигнала устанавливают стационарно на различных фиксированных расстояниях друг от друга, а изменение доплеровской частоты переизлучаемого сигнала производят в устройстве переизлучения сигнала по сигналу управления в промежутке между условно фиксированными положениями доплеровского радиолокатора профилей ветра.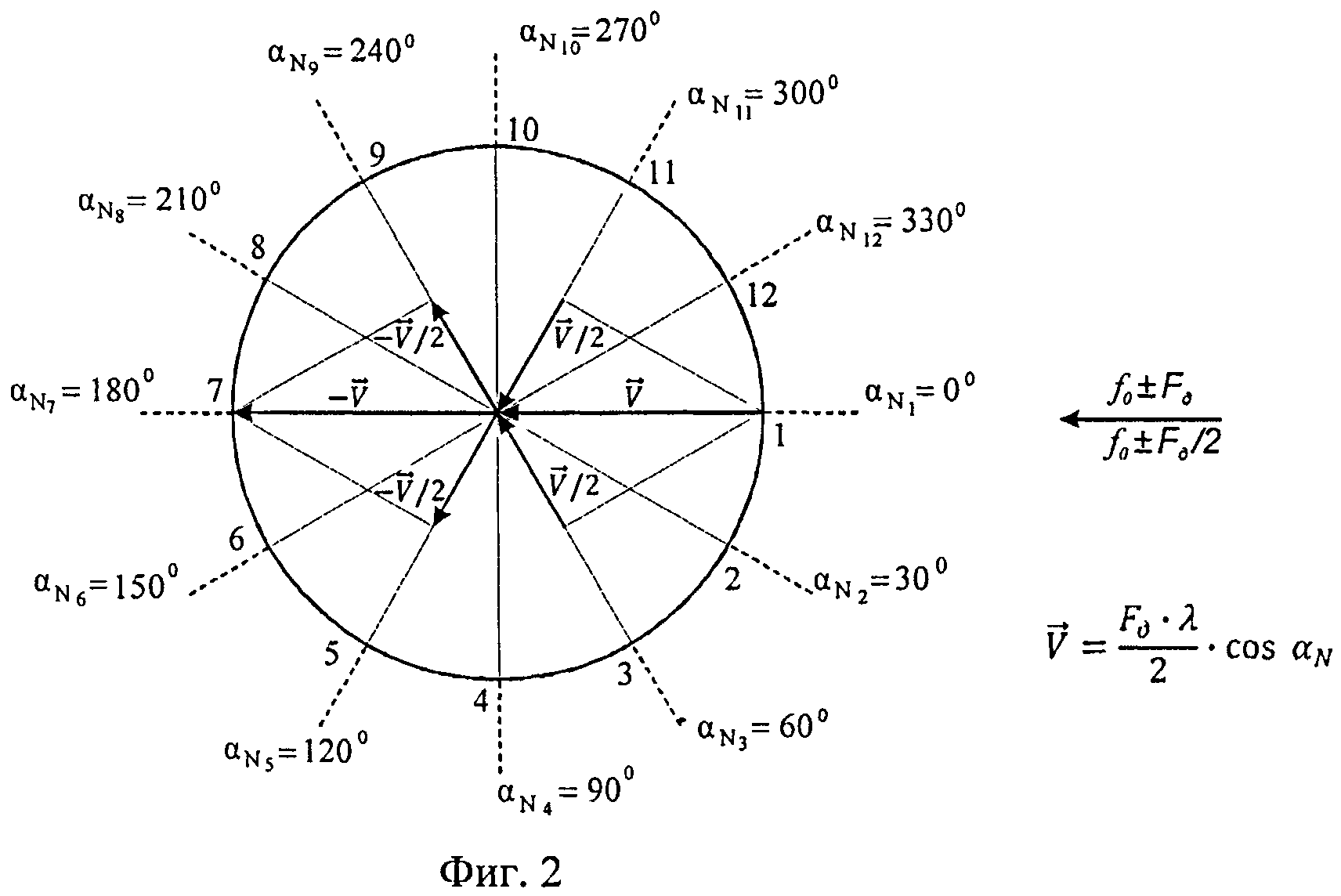
Фазированная антенная решетка с электронным сканированием в одной плоскости
Синфазный делитель мощности с неравным делением
Двухзеркальная антенна
Коаксиальная линия
Способ радиолокационного обзора пространства
Элемент активной фазированной антенной решетки отражательного типа (варианты)
Коаксиально-волноводный переход
Возбудитель волны те
Комплексный тренажер для подготовки специалистов подразделений реактивных систем залпового огня
Коаксиальный тракт
Фазированная антенная решетка с электронным сканированием в одной плоскости
Синфазный делитель мощности с неравным делением
Двухзеркальная антенна
Коаксиальная линия
Способ радиолокационного обзора пространства
Элемент активной фазированной антенной решетки отражательного типа (варианты)
Коаксиально-волноводный переход
Возбудитель волны те
Комплексный тренажер для подготовки специалистов подразделений реактивных систем залпового огня
Коаксиальный тракт

