Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Вид РИД
Изобретение
Изобретение относится к электротехнике и может быть использовано для определения параметров асинхронных электродвигателей.
Известен способ определения параметров и рабочих характеристик асинхронного двигателя без сопряжения с нагрузочным устройством [RU 2391680 С1, МПК G01R 31/34 (2006.01), опубл. 10.06.2010], выбранный в качестве прототипа. Потребляемую мощность, напряжение и ток в режиме холостого хода измеряют и регистрируют при номинальном напряжении или близком к нему, вычисляют по ним коэффициент мощности и индуктивное сопротивление статора, затем отключают двигатель от источника питания, регистрируют скачок напряжения статора, кривую затухания напряжения статора и измеряют сопротивление статора r1, по скачку напряжения, току, измеренному до отключения, коэффициенту мощности и сопротивлению фазы вычисляют реактивное сопротивление рассеяния x1 статора, по кривой затухания определяют постоянные времени T0 и T' ротора соответственно при разомкнутом статоре и статоре, условно включенном на сеть бесконечно большой мощности, с использованием полученных значений рассчитывают коэффициенты рассеяния σ1 и σ2 статора и ротора, реактивное сопротивление взаимоиндукции X12, приведенное к статору реактивное сопротивление рассеяния X2' ротора, приведенное к статору активное сопротивление R2' ротора, с использованием полученных параметров рассчитывают по «Т»- или «Г»-образной схемам замещения с одним контуром на роторе рабочие характеристики.
Недостатком известного способа является то, что для его осуществления необходимо проведение опыта холостого хода.
Задачей изобретения является расширение арсенала средств аналогичного назначения.
Это достигается тем, что в способе определения параметров асинхронного электродвигателя, также как в прототипе, осуществляют измерение потребляемых асинхронным электродвигателем токов и напряжений.
Согласно изобретению в течение пуска и торможения выбегом электродвигателя одновременно проводят измерение мгновенных величин токов и напряжений на двух фазах статора и частоты вращения вала электродвигателя, определяют модуль вектора тока статора, преобразуют напряжения из естественной координатной системы в прямоугольную стационарную систему координат, запоминают полученные значения модуля вектора тока статора, напряжений в прямоугольной стационарной системе координат, частоты вращения вала электродвигателя и используют для определения активного сопротивления и эквивалентной индуктивности обмотки статора, приведенных к статору активного сопротивления и эквивалентной индуктивности обмотки ротора, и индуктивности, обусловленной магнитным потоком в воздушном зазоре электродвигателя, путем глобальной оптимизации функции
 ,
,
где I1(t) - модуль вектора тока статора, А;
 - оценка модуля вектора тока статора, А;
- оценка модуля вектора тока статора, А;
 - оценка активного сопротивления обмотки статора. Ом;
- оценка активного сопротивления обмотки статора. Ом;
 - оценка приведенного к статору сопротивления обмотки ротора, Ом;
- оценка приведенного к статору сопротивления обмотки ротора, Ом;
 - оценка эквивалентной индуктивности обмотки статора. Ом;
- оценка эквивалентной индуктивности обмотки статора. Ом;
 - оценка эквивалентной индуктивности обмотки ротора. Ом;
- оценка эквивалентной индуктивности обмотки ротора. Ом;
 - оценка результирующей индуктивности, обусловленной магнитным потоком в воздушном зазоре машины, Ом;
- оценка результирующей индуктивности, обусловленной магнитным потоком в воздушном зазоре машины, Ом;
t - время, с;
t∑ - суммарное время переходных процессов пуска и торможения выбегом электродвигателя, с,
затем определяют приведенный к валу электродвигателя суммарный момент инерции и момент сопротивления нагрузки путем глобальной оптимизации функции
где ω(t) - частота вращения вала электродвигателя, рад/с;
 - оценка частоты вращения вала электродвигателя, рад/с;
- оценка частоты вращения вала электродвигателя, рад/с;
 - оценка суммарного момента инерции, приведенного к валу двигателя, кг·м2;
- оценка суммарного момента инерции, приведенного к валу двигателя, кг·м2;
 - оценка момента сопротивления нагрузки, Н·м;
- оценка момента сопротивления нагрузки, Н·м;
t - время, с;
t∑ - суммарное время переходных процессов пуска и торможения выбегом электродвигателя, с.
Для глобальной оптимизации функций использовали генетический алгоритм [Генетические алгоритмы, искусственные нейронные сети и проблемы виртуальной реальности / Г.К. Вороновский, К.В. Махотило, С.Н. Петрашев, С.А. Сергеев. - X.: ОСНОВА, 1997. - 112 с.].
Для рассчета переходных процессов модуля вектора тока статора при пуске и торможении электродвигателя применяли математическую модель в стационарной системе координат α, β:
 ;
;
 ;
;
 ;
;
 ;
;
где  - оценка эквивалентного сопротивления, Ом;
- оценка эквивалентного сопротивления, Ом;
 - оценка активного сопротивления обмотки статора, Ом;
- оценка активного сопротивления обмотки статора, Ом;
 - оценка приведенного к статору сопротивления обмотки ротора, Ом;
- оценка приведенного к статору сопротивления обмотки ротора, Ом;
 - оценка эквивалентной индуктивности обмотки статора, Гн;
- оценка эквивалентной индуктивности обмотки статора, Гн;
 - оценка эквивалентной индуктивности обмотки ротора, Гн;
- оценка эквивалентной индуктивности обмотки ротора, Гн;
 - оценка результирующей индуктивности, обусловленной магнитным потоком в воздушном зазоре машины, Гн;
- оценка результирующей индуктивности, обусловленной магнитным потоком в воздушном зазоре машины, Гн;
 - оценка коэффициента рассеяния;
- оценка коэффициента рассеяния;
zp - число пар полюсов машины;
U1α(t), U1β(t) - составляющие напряжения статора. В;
Î1α(t), Î1β(t) - оценки составляющих тока статора, А;
 ,
,  - оценки составляющих потокосцепления ротора, Вб;
- оценки составляющих потокосцепления ротора, Вб;
ω(t) - угловая скорость вращения ротора электродвигателя, рад/с.
Для рассчета переходных процессов угловой скорость вращения ротора при пуске и торможении электродвигателя применяли математическую модель в стационарной системе координат α, β:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ,
,
где  - оценка эквивалентного сопротивления, Ом;
- оценка эквивалентного сопротивления, Ом;
 - оценка активного сопротивления обмотки статора, Ом;
- оценка активного сопротивления обмотки статора, Ом;
 - оценка приведенного к статору сопротивления обмотки ротора. Ом;
- оценка приведенного к статору сопротивления обмотки ротора. Ом;
 - оценка эквивалентной индуктивности обмотки статора, Гн;
- оценка эквивалентной индуктивности обмотки статора, Гн;
 - оценка эквивалентной индуктивности обмотки ротора, Гн;
- оценка эквивалентной индуктивности обмотки ротора, Гн;
 - оценка результирующей индуктивности, обусловленной магнитным потоком в воздушном зазоре машины, Гн;
- оценка результирующей индуктивности, обусловленной магнитным потоком в воздушном зазоре машины, Гн;
 - оценка коэффициента рассеяния;
- оценка коэффициента рассеяния;
zp - число пар полюсов машины;
U1α(t), U1β(t) - составляющие напряжения статора. В;
Î1α(t), Î1β(t) - оценки составляющих тока статора. А;
 ,
,  ) - оценки составляющих потокосцепления ротора, Вб;
) - оценки составляющих потокосцепления ротора, Вб;
 - оценка угловой скорость вращения ротора электродвигателя,
- оценка угловой скорость вращения ротора электродвигателя,
рад/с;
 - оценка электромагнитного момента двигателя, H·м;
- оценка электромагнитного момента двигателя, H·м;
 - оценка момента сопротивления нагрузки, H·м;
- оценка момента сопротивления нагрузки, H·м;
 - оценка суммарного момента инерции, приведенного к валу двигателя, кг·м2.
- оценка суммарного момента инерции, приведенного к валу двигателя, кг·м2.
Данный способ позволяет производить идентификацию не только электромагнитных параметров асинхронных электродвигателей, но и механических по мгновенным величинам тока, скорости и напряжения.
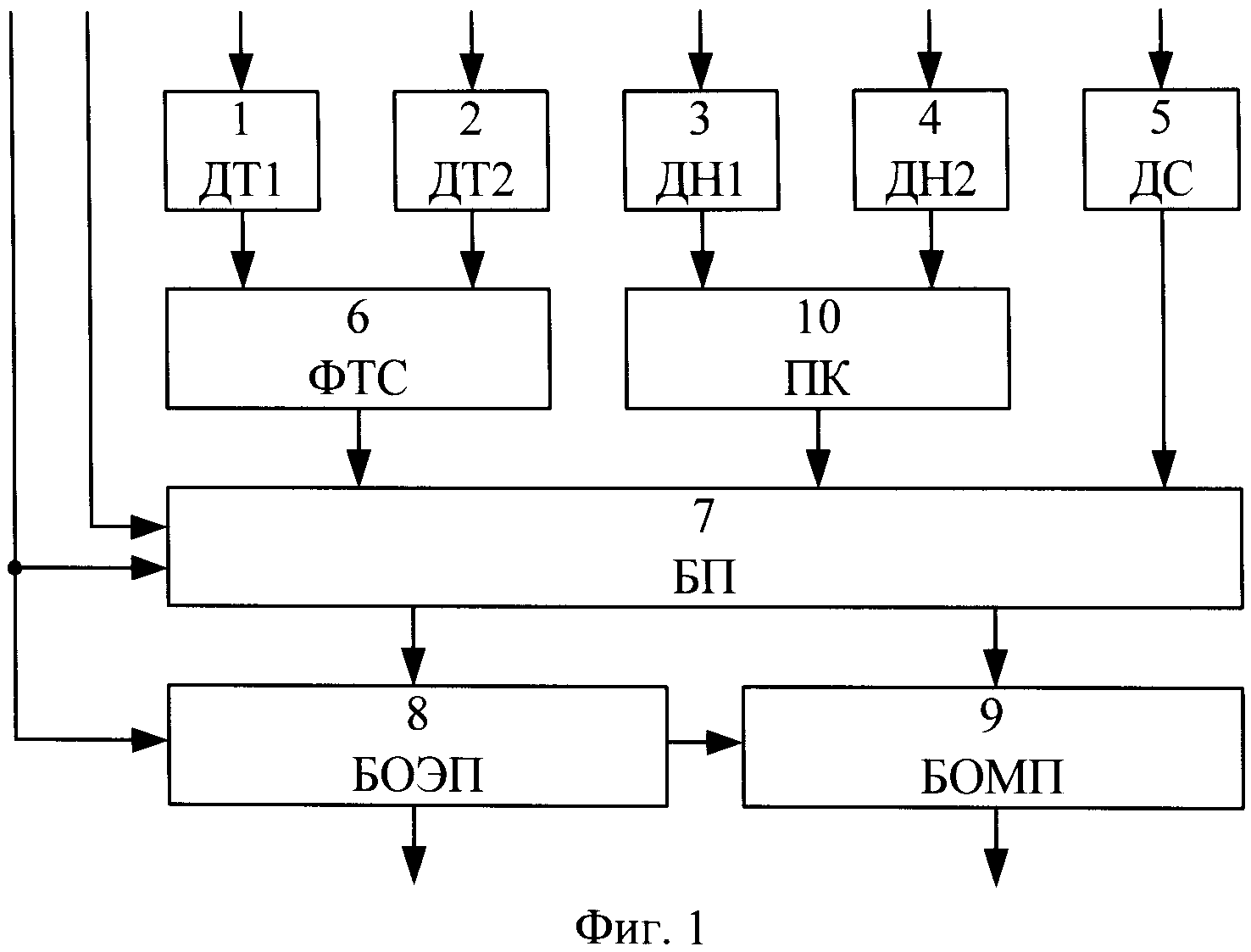
На фиг.1 приведена схема устройства, реализующего рассматриваемый способ определения параметров асинхронного электродвигателя.
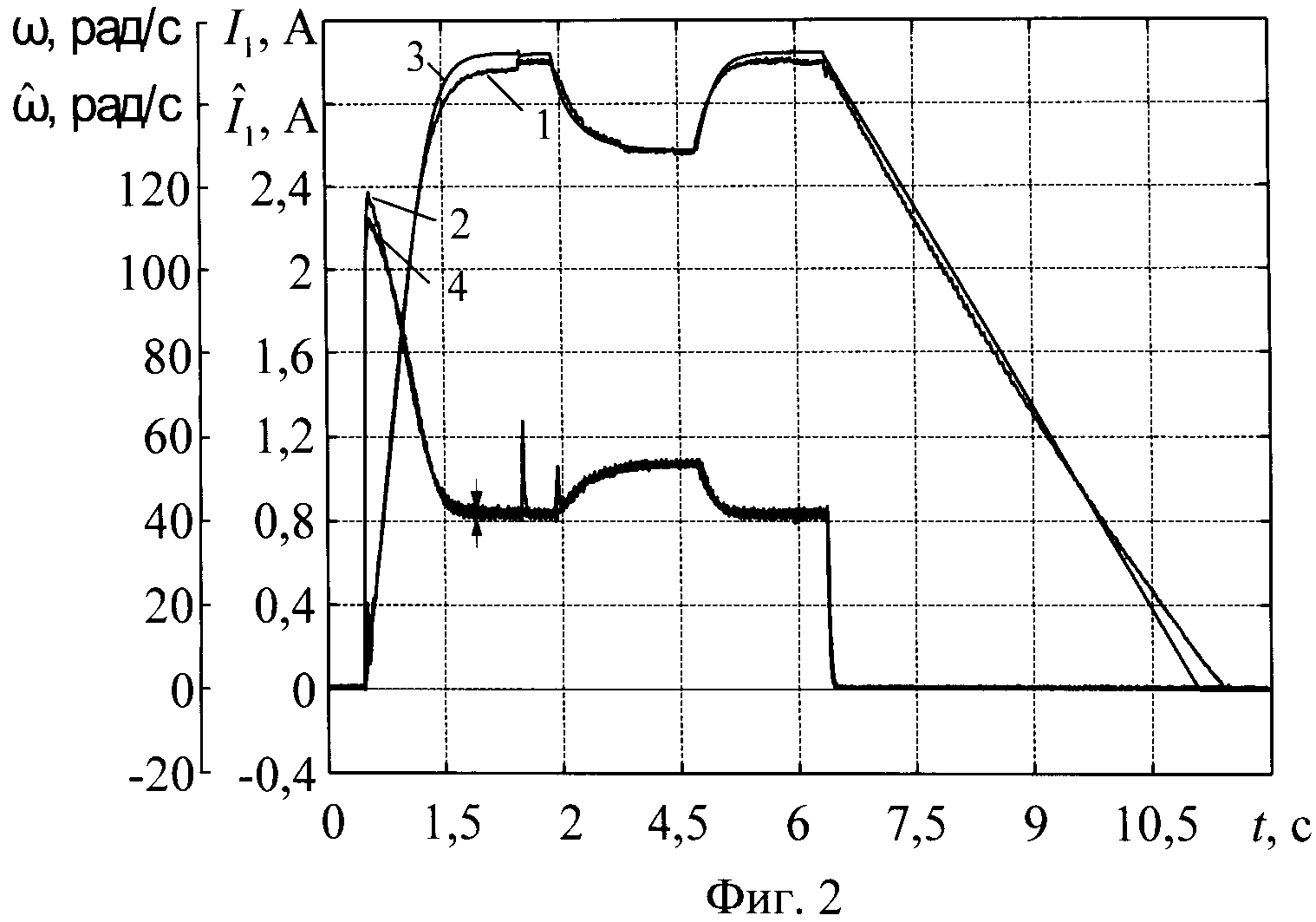
На фиг.2 приведены графики переходных процессов тока и скорости, где, 1, 2 - экспериментальные кривые, 3, 4 - расчетные кривые.
В таблице 1 приведены параметры асинхронного электродвигателя, определенные по заявленному способу.
Способ определения параметров асинхронного электродвигателя осуществлен с помощью устройства (фиг.1), содержащего датчики фазных токов 1 (ДТ1), 2 (ДТ2), датчики фазных напряжений 3 (ДН1), 4 (ДН2), подключенные к двум фазам питания асинхронного электродвигателя, и датчик частоты вращения вала электродвигателя 5 (ДС), установленный на валу электродвигателя. К датчикам токов 1 (ДТ1), 2 (ДТ2) последовательно подключены формирователь тока статора 6 (ФТС), блок памяти 7 (БП), блок определения электрических параметров электродвигателя 8 (БОЭП), блок определения механических параметров электродвигателя 9 (БОМП). К датчикам фазных напряжений 3 (ДН1), 4 (ДН2) последовательно подключены преобразователь координат 10 (ПК), блок памяти 7 (БП), блок определения механических параметров электродвигателя 9 (БОМП). К датчику частоты вращения вала электродвигателя 5 (ДС) подключен блок памяти 7 (БП). Первый и второй управлящие входы блока памяти 7 (БП) и управляющий вход блока определения электрических параметров электродвигателя 8 (БОЭП) соединены с системой управления электропривода (не показано на фиг.1). Блоки определения электрических и механических параметров электродвигателя 8 (БОЭП), 9 (БОМП) связаны с ЭВМ (не показано на фиг.1).
В качестве датчиков фазных токов 1 (ДТ1), 2 (ДТ2) использованы датчики тока - промышленный прибор КЭИ-0,1, а в качестве датчиков фазных напряжений 3 (ДН1), 4 (ДН2) - датчики напряжения LEM. Формирователь тока статора 6 (ФТС), преобразователь координат 10 (ПК), блок памяти 7 (БП), блоки определения электрических и механических параметров электродвигателя 8 (БОЭП), 9 (БОМП) выполнены на базе микроконтроллера типа TMS320C28346 фирмы Texas Instruments.
Для проверки работоспособности предложенного способа определения параметров датчики фазных токов 1 (ДТ1), 2 (ДТ2) и датчики фазных напряжений 3 (ДН1), 4 (ДН2) подключили к двум фазам питания асинхронного электродвигателя (f1н=50 Гц, U1н=220 B, zp=2, ω0=157 рад/с). Датчик частоты вращения вала электродвигателя 5 (ДС) установили на валу электродвигателя. Измерили мгновенные величины токов и напряжений на двух фазах статора и частоту вращения вала электродвигателя. Мгновенные величины токов передали в формирователь тока статора 6 (ФТС), где получили мгновенную величину модуля вектора тока статора. Мгновенные величины напряжений передали в преобразователь координат 10 (ПК), где получили мгновенные величины напряжений в прямоугольной стационарной системе координат. Величины модуля вектора тока статора, напряжений в прямоугольной стационарной системе координат и частоты вращения вала электродвигателя передали в блок памяти 7 (БП). В момент включения в сеть электродвигателя на первый управляющий вход блока памяти 7 (БП) подали сигнал о пуске двигателя, по этому сигналу начали запись величин модуля вектора тока статора, напряжений в прямоугольной стационарной системе координат и частоты вращения вала электродвигателя. После осуществления пуска и торможения выбегом электродвигателя через определенное время подали управляющий сигнал на второй управляющий вход блока памяти 7 (БП) и управляющий вход блока определения электрических параметров электродвигателя 8 (БОЭП). По этому сигналу остановили запись сигналов в блоке памяти 7 (БП), на вход блока определения электрических параметров электродвигателя 8 (БОЭП) передали записанные массивы переходных процессов модуля вектора тока статора, напряжений в прямоугольной стационарной системе координат и частоты вращения вала электродвигателя, и затем начали определение активного сопротивления и эквивалентной индуктивности обмотки статора, приведенных к статору активного сопротивления и эквивалентной индуктивности обмотки ротора, и индуктивности, обусловленной магнитным потоком в воздушном зазоре электродвигателя, путем глобальной оптимизации функции
 ,
,
где I1(t) - модуль вектора тока статора, А;
 - оценка модуля вектора тока статора, А;
- оценка модуля вектора тока статора, А;
- оценка активного сопротивления обмотки статора, Ом;
- оценка приведенного к статору сопротивления обмотки ротора. Ом;
- оценка эквивалентной индуктивности обмотки статора, Ом;
- оценка эквивалентной индуктивности обмотки ротора, Ом;
 - оценка результирующей индуктивности, обусловленной магнитным потоком в воздушном зазоре машины, Ом;
- оценка результирующей индуктивности, обусловленной магнитным потоком в воздушном зазоре машины, Ом;
t - время, с;
t∑ - суммарное время переходных процессов пуска и торможения выбегом электродвигателя, с.
Затем определенные электрические параметры электродвигателя и записанные массивы переходных процессов передали в блок определения механических параметров электродвигателя 9 (БОМП), где определили приведенный к валу электродвигателя суммарный момент инерции и момент сопротивления нагрузки путем глобальной оптимизации функции
 ,
,
где ω(t) - частота вращения вала электродвигателя, рад/с;
 - оценка частоты вращения вала электродвигателя, рад/с;
- оценка частоты вращения вала электродвигателя, рад/с;
- оценка суммарного момента инерции, приведенного к валу двигателя, кг-м;
 - оценка момента сопротивления нагрузки, Н-м;
- оценка момента сопротивления нагрузки, Н-м;
t - время, с;
t∑ - суммарное время переходных процессов пуска и торможения выбегом электродвигателя, с.
Опрос датчиков, вычисление модуля вектора тока статора и напряжений в прямоугольной стационарной системе координат, запись сигналов провели с частотой 400 Гц в течение 12 с в режимах пуска и торможения выбегом электродвигателя. Определенные параметры асинхронного электродвигателя передали в ЭВМ (таблица 1).
Проверку правильности определения параметров асинхронного электродвигателя осуществляли путем сравнения расчетных кривых 1,2 и экспериментальных кривых 3,4 переходных процессов электродвигателя (фиг.2). Для расчета переходных процессов применяли математическую модель в стационарной системе координат α, β.
После расчета переходных процессов модуля тока и скорости электродвигателя с идентифицированными параметрами были определены критерии соответствия, которые показали относительные отклонения оценок модуля вектора тока статора σ1=3% и частоты вращения вала электродвигателя σω=2,7% от экспериментальных значений. Из приведенного сравнения видно, что расчетные графики соответствуют экспериментальным, следовательно погрешность определения параметров незначительна.
|
 , Ом
, Ом







Электропривод переменного тока
Способ определения статических характеристик нагрузки по напряжению
Способ диагностики витковых замыканий в обмотке ротора синхронного генератора
Способ измерения реактивной мощности в трехфазной симметричной электрической цепи
Способ прогнозирования износостойкости твердосплавных режущих инструментов
Комплексный препарат для профилактики и лечения кишечных инфекций
Способ получения вспененного материала и шихта для его изготовления
Способ направленного затвердевания залитого в форму металла
Способ прогнозирования течения ишемической болезни сердца
Способ подземной газификации
Способ оценки прогрессирования атерогенности при ишемической болезни сердца
Способ получения нитрида циркония
Способ умягчения воды
Свч плазменный конвертор

