Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДА
Вид РИД
Изобретение
ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Данная заявка является продолжением предварительной патентной заявки US №60/894006, и является частичным продолжением патентной заявки US №11/385354, поданной 20 марта 2006 г.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к оптимизации работы поезда и, в частности, к мониторингу и контролю работы поезда для повышения эффективности с учетом ограничений, налагаемых расписанием.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Системы с дизельным приводом в порядке примера, но не ограничения, немагистральные локомотивы, морские дизельные силовые установки, стационарная система с дизельным приводом и железнодорожные транспортные средства, или поезда, обычно приводятся в движение дизельной силовой установкой. В отношении железнодорожного транспортного средства, дизельная силовая установка является частью, по меньшей мере, одного локомотива, и поезд дополнительно включает в себя совокупность вагонов, например, грузовые вагоны. Обычно предусмотрено более одного локомотива, причем локомотивы образуют локомотивную сцепку. Локомотив является сложной системой с многочисленными подсистемами, причем каждая подсистема взаимосвязана с другими подсистемами.
Машинист находится на локомотиве, чтобы гарантировать правильную работу локомотива и связанную с ним нагрузку грузовых вагонов. Помимо обеспечения правильной работы локомотива, машинист также отвечает за определение рабочих скоростей поезда и за ограничение сил приемлемыми значениями в поезде, часть которого составляют локомотивы. Для осуществления этой функции, машинист, в общем случае, должен иметь большой опыт вождения локомотива по указанной местности с различными вагонными сцепками. Эта информация должна согласоваться с прогнозируемыми рабочими скоростями, которые могут изменяться с изменением положения поезда вдоль пути. Кроме того, машинист также отвечает за то, чтобы внутрипоездные силы оставались в допустимых пределах.
На Фиг.11 изображена блок-схема известного уровня техники, представляющая современный подход к управлению железнодорожным транспортным средством. Машинист 649 управляет железнодорожным транспортным средством 653, вручную перемещая рычаг главного регулятора 651 в определенное положение. Хотя показан главный регулятор, специалистам в данной области техники очевидно, что вместо главного регулятора 651 можно использовать другие устройства управления системой. Таким образом, термин главный регулятор не предусматривает ограничения. Машинист 649 определяет положение или позицию главного регулятора 651 на основании совокупности факторов, включающих в себя, но без ограничения, текущую скорость, нужную скорость, требования к выбросам, тяговое усилие, нужную мощность, информацию, поступающую извне, и т.д.
Однако, даже располагая информацией, обеспечивающей безопасную работу, машинист обычно не может управлять локомотивом таким образом, чтобы расход топлива был минимален в каждой поездке. Другие факторы, которые нужно учитывать, могут включать в себя выбросы, условия окружающей среды машиниста, например, шум/вибрацию, взвешенную комбинацию расхода топлива и выбросов, и т.д. Это нелегкая задача, поскольку, например, размер и нагрузка поезда изменяются, локомотивы и их характеристики расхода топлива/выбросов отличаются, и условия погоды и движения также изменяются. Машинист может более эффективно управлять поездом, если он имеет средство для определения оптимального режима управления поездом на данный день, удовлетворяющего требуемому расписанию (времени прибытия) и, в то же время, обеспечивающего минимальный расход топлива, невзирая на источники изменений.
Аналогично, владельцы и/или машинисты немагистральных локомотивов, морских дизельных силовых установок и/или стационарных систем с дизельным приводом оценят финансовые выгоды, обеспечиваемые этой системой с дизельным приводом за счет оптимизации экономии топлива и выбросов, которая позволяет одновременно сокращать общий расход топлива и минимизировать выбросы, в то же время, удовлетворяя эксплуатационным ограничениям, в порядке примера, но не ограничения, ограничениям на время выполнения рейса.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является повышение эффективности работы поезда путем сокращения общего расхода топлива и минимизации выбросов.
Варианты осуществления настоящего изобретения раскрывают систему управления для эксплуатации системы с дизельным приводом, имеющей, по меньшей мере, одну дизельную силовую установку. Система включает в себя оптимизатор рейса, который определяет, по меньшей мере, один регулирующий параметр, используемый дизельной силовой установкой. Также раскрыт преобразователь, который обеспечивает прием, по меньшей мере, одного сигнала информации, подлежащей использованию дизельной силовой установкой, и преобразования информации в воспринимаемый сигнал. Дополнительно раскрыт датчик для сбора, по меньшей мере, одних рабочих данных от системы с дизельным приводом, связанный с оптимизатором рейса. Предусмотрена система связи для обеспечения замкнутой схемы управления между оптимизатором рейса, преобразователем и датчиком.
Согласно другому варианту осуществления настоящего изобретения предложен способ управления работой системы с дизельным приводом, имеющей, по меньшей мере, одну дизельную силовую установку. Способ включает в себя этап, на котором определяют, по меньшей мере, один из оптимизированных регулирующих параметров для дизельной силовой установки. На другом этапе преобразуют, по меньшей мере, один оптимизированный регулирующий параметр в распознаваемый входной сигнал для дизельной силовой установки. На следующем этапе определяют, по меньшей мере, один сигнал рабочего состояния системы с дизельным приводом при применении, по меньшей мере, одного оптимизированного регулирующего параметра. На еще одном этапе передают в замкнутой схеме управления на оптимизатор, по меньшей мере, один сигнал рабочего состояния, так что, по меньшей мере, сигнал рабочего состояния используется для дополнительной оптимизации, по меньшей мере, одного регулирующего параметра.
Еще один вариант осуществления раскрывает компьютерный программный продукт для эксплуатации системы с дизельным приводом, имеющей компьютер и, по меньшей мере, одну дизельную силовую установку. Компьютерный программный продукт содержит компьютерный программный модуль для определения, по меньшей мере, одного регулирующего параметра для дизельной силовой установки, и компьютерный программный модуль для преобразования, по меньшей мере, одного регулирующего параметра в распознаваемый входной сигнал для дизельной силовой установки. Дополнительно раскрыт компьютерный программный модуль для определения, по меньшей мере, одного рабочего состояния системы с дизельным приводом при применении, по меньшей мере, одного регулирующего параметра. Также раскрыт компьютерный программный модуль для передачи в замкнутой схеме управления на оптимизатор, по меньшей мере, одного рабочего состояния, благодаря чему, по меньшей мере, рабочее состояние используется для дополнительной оптимизации, по меньшей мере, одного регулирующего параметра.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Более конкретное описание вариантов осуществления настоящего изобретения приведено посредством ссылки на конкретные варианты его осуществления, которые показаны на прилагаемых чертежах, на которых:
Фиг.1 изображает логическую блок-схему одного варианта осуществления настоящего изобретения;
Фиг.2 - упрощенную модель поезда, которую можно применять, согласно изобретению;
Фиг.3 - вариант осуществления элементов настоящего изобретения, согласно изобретению;
Фиг.4 - вариант осуществления кривой расхода топлива/времени движения, согласно изобретению;
Фиг.5 - вариант разбиения на участки для планирования поездки, согласно изобретению;
Фиг.6 - вариант осуществления примера разбиения, согласно изобретению;
Фиг.7 - логическую блок-схему одного варианта осуществления настоящего изобретения, согласно изобретению;
Фиг.8 - динамический дисплей для использования машинистом, согласно изобретению;
Фиг.9 - другой вариант динамического дисплея для использования машинистом, согласно изобретению;
Фиг.10 - еще один вариант динамического дисплея для использования машинистом, согласно изобретению;
Фиг.11 - блок-схему, согласно уровню техники, представляющую современный подход к управлению железнодорожным транспортным средством;
Фиг.12 - вариант осуществления системы с замкнутой схемой для эксплуатации железнодорожного транспортного средства, согласно изобретению;
Фиг.13 - замкнутую схему, объединенную с главным регулятором, согласно изобретению;
Фиг.14 - вариант осуществления системы с замкнутой схемой для эксплуатации железнодорожного транспортного средства, объединенной с другой подсистемой ввода для эксплуатации железнодорожного транспортного средства, согласно изобретению;
Фиг.15 - другой вариант осуществления главного регулятора как части системы управления с замкнутой схемой, согласно изобретению; и
Фиг.16 - логическую блок-схему способа эксплуатации железнодорожного транспортного средства с замкнутой схемой управления, согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Хотя иллюстративные варианты осуществления настоящего изобретения описаны в отношении железнодорожных транспортных средств, в частности, поездов и локомотивов, имеющих дизельные двигатели, варианты осуществления настоящего изобретения применимы к другим случаям, в порядке примера, но без ограничения, немагистральным локомотивам, морским судам и стационарным устройствам, в которых может использоваться дизельный двигатель. По этой причине, при рассмотрении указанной задачи, она включает в себя задачу или требование к реализации системой с дизельным приводом. Таким образом, применительно к железнодорожным, морским или немагистральным транспортным средствам, оно может относиться к движению системы из текущего положения в пункт назначения. В случае стационарных применений, в порядке примера, но не ограничения, стационарной энергетической станции или сети стационарных энергетических станций, указанная задача может относиться к величине мощности (например, МВт/ч) или другому параметру или требованию, которому должна удовлетворять система с дизельным приводом. Аналогично, рабочее состояние дизельной силовой установки может включать в себя один или несколько параметров, из группы, состоящей из скорости, нагрузки, расхода топлива, затрат времени и т.д.
В одном примере, относящемся к морским судам, совокупность буксиров может работать совместно для перемещения одного и того же крупного судна, причем действия всех буксиров скоординированы по времени для выполнения задачи перемещения крупного судна. В другом примере, единичное морское судно может иметь совокупность двигателей. Немагистральное транспортное средство (OHV) может предусматривать парк транспортных средств, которые имеют одну и ту же задачу перемещения по земле, из положения A в положение B, причем действия всех OHV скоординированы по времени для выполнения задачи. В отношении стационарной энергетической станции, несколько станций могут быть сгруппированы вместе для коллективной выработки мощности для конкретного/ой места и/или цели. Согласно другому варианту осуществления, предусмотрена единичная станция, но с совокупностью генераторов, образующих единичную станцию.
Варианты осуществления настоящего изобретения решают проблемы уровня техники, за счет обеспечения системы, способа и компьютерно-реализуемого способа, например, компьютерного программного продукта, для определения и реализации стратегии управления и/или эксплуатации. В отношении локомотивов, иллюстративные варианты осуществления настоящего изобретения также применимы, когда локомотивная сцепка работает в режиме распределенной подачи мощности.
Специалистам в данной области техники очевидно, что устройство, например система обработки данных, включающее в себя ЦП, память, устройство ввода/вывода, хранилище программ, шину обмена данными и другие необходимые компоненты, можно запрограммировать или иначе приспособить для реализации способа согласно вариантам осуществления настоящего изобретения. Такая система включает в себя соответствующее программное средство для выполнения способов согласно этим вариантам осуществления.
Кроме того, изделие производства, например записанный диск или другой аналогичный компьютерный программный продукт, для использования с системой обработки данных, включает в себя носитель данных и записанную на нем программу, предписывающую системе обработки данных выполнять способы настоящего изобретения. Такие устройство и изделия производства также отвечают сущности и объему настоящего изобретения.
В широком смысле, задачей изобретения является определение и реализация стратегии управления и/или эксплуатации системы с дизельным приводом для улучшения, по меньшей мере, определенных параметров, необходимых согласно объективным критериям эксплуатации, в то же время, удовлетворяя расписанию и скоростным ограничениям. Для облегчения понимания настоящего изобретения, они описаны ниже со ссылкой на конкретные варианты реализации. Изобретение описано в общем контексте компьютерно-выполняемых инструкций, например программных модулей, выполняемых компьютером. В общем случае, программные модули включают в себя процедуры, программы, объекты, компоненты, структуры данных, и т.д., которые выполняют конкретные задачи или реализуют те или иные абстрактные типы данных. Например, программное обеспечение, лежащее в основе иллюстративных вариантов осуществления настоящего изобретения, может быть написано на разных языках, для использования с разными платформами обработки данных. В нижеследующем описании, примеры настоящего изобретения описаны применительно к веб-порталу, который использует веб-браузер. Однако очевидно, что принципы, лежащие в основе вариантов осуществления настоящего изобретения, можно реализовать посредством других типов компьютерного программного обеспечения.
Кроме того, специалистам в данной области техники очевидно, что варианты осуществления изобретения можно осуществлять на практике с другими конфигурациями компьютерной системы, включающими в себя карманные устройства, многопроцессорные системы, бытовую электронику на базе микропроцессора или с возможностью программирования, миникомпьютеры, универсальные компьютеры и пр. Варианты осуществления также можно осуществлять на практике в распределенной вычислительной среде, где задания выполняются удаленными устройствами обработки, которые связаны друг с другом сетью связи. В распределенной вычислительной среде, программные модули могут размещаться как на локальных, так и на удаленных компьютерных носителях, включающих в себя запоминающие устройства. Эти локальные и удаленные вычислительные среды могут содержаться целиком в локомотиве, или в соседних локомотивах сцепки или вне поезда, в придорожных или центральных службах, причем предусмотрена беспроводная связь между вычислительными средами.
В этом документе используется термин локомотивная сцепка. Термин локомотивная сцепка означает один или несколько локомотивов подряд, соединенных друг с другом для обеспечения движущей и/или тормозящей способности. Локомотивы соединены друг с другом так, что между локомотивами нет вагонов поезда. Поезд может иметь в своем составе более одной сцепки. В частности, может иметь место головная сцепка и одна или несколько удаленных сцепок, например, первая удаленная сцепка посередине последовательности вагонов и другая удаленная сцепка в хвосте поезда. Каждая локомотивная сцепка может иметь первый или головной локомотив и один или несколько хвостовых локомотивов. Хотя локомотивная сцепка обычно рассматривается как последовательные локомотивы, специалистам в данной области техники очевидно, что группу локомотивов также можно считать сцепкой даже при наличии, по меньшей мере, одного вагона, разделяющего локомотивы, например, когда локомотивная сцепка предназначена для работы в режиме распределенной подачи мощности, в котором команды ускорения и торможения передаются от головного локомотива на удаленные локомотивы по каналу радиосвязи или физическому кабелю. По этой причине, термин локомотивная сцепка не следует считать ограничивающим фактором при рассмотрении множественных локомотивов в одном и том же поезде.
Варианты осуществления изобретения можно реализовать по-разному, в том числе, в виде системы (включающей в себя компьютерную систему обработки), способа (включающего в себя компьютеризированный способ), устройства, компьютерно-считываемого носителя, компьютерного программного продукта, графического интерфейса пользователя, включающего в себя веб-портал или структуру данных, физически воплощенного в компьютерно-считываемой памяти. Ниже рассмотрено несколько вариантов осуществления настоящего изобретения.
На Фиг.1 представлена логическая блок-схема настоящего изобретения. Показано, что инструкции поступают в соответствии с планированием поездки либо на борту, либо из удаленного положения, например, диспетчерского центра 10. Такая входная информация включает в себя, но без ограничения, положение поезда, состав сцепки (например, модели локомотивов), характеристику тяговой мощности локомотива для передачи тяги локомотива, расход топлива как функция выходной мощности, характеристики охлаждения, назначенный маршрут поездки (эффективный уклон пути и кривизна как функция железнодорожного знака или компонент "эффективного уклона", отражающий кривизну, согласно стандартным железнодорожным принципам), состав и нагрузку вагонов (включая эффективные коэффициенты сопротивления), нужные параметры движения, включающие в себя, но без ограничения, начальные время и положение, конечное положение, время движения, идентификацию бригады (пользователя и/или машиниста), время истечения рабочей смены и маршрут поездки.
Эти данные могут поступать на локомотив 42 согласно различным методам и процессам, в порядке примера, но не ограничения, посредством ручного ввода машиниста в локомотив 42 через бортовой дисплей, обращения к устройству хранения данных, например, ПЗУ, жесткому диску и/или флэш-карте или передачи информации по беспроводному каналу связи из центрального или придорожного положения 41, например, путевого сигнального устройства и/или придорожного устройства, на локомотив 42. Характеристики нагрузки локомотива 42 и поезда 31 (например, сопротивление) также могут изменяться на протяжении маршрута (например, в зависимости от высоты, температуры воздуха и состояния рельсов и вагонов), что приводит к обновлению плана, отражающему такие изменения согласно любым рассмотренным выше способам. Обновленные данные, которые влияют на процесс оптимизации движения, могут поступать согласно любым описанным выше способам и методам и/или посредством автономного сбора данных состояния локомотива/поезда в реальном времени. Такие обновления включают в себя, например, изменения характеристик локомотива или поезда, зарегистрированные оборудованием мониторинга на локомотиве 42 или вне его.
Путевая сигнальная система определяет допустимую скорость поезда. Существует много типов путевых сигнальных систем и правил эксплуатации, связанных с каждым из сигналов. Например, некоторые сигналы имеют единичный свет (включаемый/отключаемый), некоторые сигналы имеют единичную линзу с множественными цветами, и некоторые сигналы имеют множественные световые сигналы и цвета. Эти сигналы могут указывать, что путь свободен, и что поезд может следовать на максимальной допустимой скорости. Они также могут указывать необходимость снижения скорости или остановки. Это снижение скорости может быть необходимо осуществлять незамедлительно или в определенном положении (например, до следующего сигнала или пересечения).
Состояние сигнала передается на поезд и/или машинисту различными средствами. Некоторые системы имеют схемы на пути и воспринимающие катушки индуктивности на локомотивах. Другие системы имеют беспроводные системы связи. Сигнальные системы также могут требовать, чтобы машинист визуально наблюдал сигнал и предпринимал соответствующие действия.
Сигнальная система может взаимодействовать с бортовой сигнальной системой и регулировать скорость локомотива согласно вводам и соответствующим правилам эксплуатации. Для сигнальных систем, требующих, чтобы машинист визуально наблюдал состояние сигнала, на экране машиниста представлены соответствующие варианты сигнала, которые машинист должен вводить на основании положения поезда. Тип сигнальных систем и правил эксплуатации, как функция положения, может храниться в бортовой базе данных 63.
На основании данных спецификации, вводимых в вариант осуществления настоящего изобретения, вычисляется оптимальный план, который минимизирует расход топлива и/или генерацию выбросов с учетом предельной скорости вдоль маршрута и нужных начального и конечного времени для создания профиля поездки 12. Профиль содержит регулировки оптимальной скорости и мощности (позиции регулятора), которым должен следовать поезд, выраженные как функция расстояния и/или времени от начала движения, эксплуатационные ограничения поезда, включающие в себя, но без ограничения, регулирования максимальной мощности в соответствии с позицией регулятора и торможения, предельные скорости как функция положения и предполагаемые расход топлива и генерацию выбросов. Значение позиции регулятора выбирается для получения решения на переключение регулятора примерно через каждые 10-30 секунд. Специалистам в данной области техники очевидно, что решения на переключение регулятора можно получать с более длинными или более короткими интервалами, если необходимо и/или желательно следовать оптимальному профилю скорости. В более широком смысле, специалистам в данной области техники очевидно, что профили обеспечивают регулирование мощности для поезда, на уровне поездов, на уровне сцепок и/или на уровне отдельных локомотивов. Используемое здесь понятие мощности содержит тормозную мощность, движущую мощность и мощность пневматических тормозов. Согласно другому предпочтительному варианту осуществления, вместо работы с традиционными дискретными позициями регулятора мощности, настоящее изобретение определяет нужную регулировку мощности из непрерывного диапазона регулировок мощности, для оптимизации профиля скорости. Таким образом, например, если оптимальный профиль указывает позицию регулятора 6.8 вместо позиции регулятора 7, локомотив 42 работает на 6.8. Благодаря таким промежуточным регулировкам мощности можно обеспечить дополнительный выигрыш в эффективности, что описано ниже.
Процедура вычисления оптимального профиля может включать в себя разнообразные способы расчета последовательности подачи мощности, которая движет поезд 31, для минимизации расхода топлива и/или выбросов при условии эксплуатационных ограничений и ограничений, налагаемых расписанием, для локомотива, которые приведены ниже. В ряде случаев оптимальный профиль может быть, по существу, аналогичен ранее определенному профилю в силу схожести конфигураций поезда, маршрута и условий окружающей среды. В этих случаях может быть достаточно извлечь предварительно определенный режим управления из базы данных 63 и управлять поездом в соответствии с ним. В отсутствие предыдущего плана, способы вычисления нового плана включают в себя, но без ограничения, прямое вычисление оптимального профиля с использованием моделей на основе дифференциальных уравнений, которые аппроксимируют физику движения поезда. Согласно этому процессу, определяется количественная целевая функция, причем функция обычно содержит взвешенную сумму (интеграл) модельных переменных, которые соответствуют скорости расхода топлива и генерации выбросов плюс член, наказывающий за чрезмерное переключение регулятора.
Формула оптимального управления устанавливается для минимизации количественной целевой функции при условии ограничений, включающих в себя, но без ограничения, регулировки предельной скорости и минимальной и максимальной мощности (положения регулятора). В зависимости от задач планирования в любое время, задача может ставиться гибко, чтобы минимизировать топливо при условии ограничений на выбросы и предельные скорости, или чтобы минимизировать выбросы, при условии ограничений на расход топлива и время прибытия. Можно также поставить целью, например, минимизировать суммарное время движения без ограничений на совокупные выбросы или расход топлива, когда такое смягчение ограничений разрешено или необходимо для рейса.
В данном описании представлены иллюстративные уравнения и целевые функции для минимизации расхода топлива локомотива. Эти уравнения и функции приведены исключительно в порядке примера, поскольку другие уравнения и целевые функции можно применять для оптимизации расхода топлива или для оптимизации других рабочих параметров локомотива/поезда.
Математически задачу, подлежащую решению, можно поставить более точно. Основные физические процессы выражаются следующим образом:
где: x - позиция поезда, v - скорость поезда, t - время (в милях, милях в час и минутах или часах, соответственно) и u - входная команда позиции регулятора (мощности). Кроме того, D обозначает расстояние, которое необходимо преодолеть, Tf - нужное время прибытия на расстоянии D вдоль пути, Te - тяговое усилие, развиваемое локомотивной сцепкой, Ga - гравитационное сопротивление, которое зависит от длины поезда, состава поезда и местности в которой находится поезд, и R - чистое сопротивление, зависящее от скорости, комбинации локомотивной сцепки и поезда. Также можно задать начальную и конечную скорости, но, без потери общности, здесь они заданы равными нулю (поезд стоит в начале и конце поездки). Модель легко модифицировать, включая в нее другие динамические факторы, например, задержку между переключением регулятора, u, изменением тягового или тормозящего усилия. С использованием этой модели, устанавливается формула оптимального управления для минимизации количественной целевой функции при условии ограничений, включающих в себя, но без ограничения, предельные скорости и минимальную и максимальную регулировки мощности (положения регулятора). В зависимости от задачи планирования в любое время, задача может быть задана гибко для минимизации расхода топлива при условии ограничений на выбросы и предельных скоростей, или для минимизации выбросов, при условии ограничений на расход топлива и время прибытия.
Также можно задать целью, например, минимизацию суммарного времени движения без ограничений на совокупные выбросы или расход топлива, в случае, когда такое ослабление ограничений разрешено или необходимо для рейса. Все эти рабочие характеристики можно выразить как линейную комбинацию любых из следующих величин:
 - Минимизация суммарного расхода топлива
- Минимизация суммарного расхода топлива
 - Минимизация времени движения
- Минимизация времени движения
 - Минимизация переключения регулятора (кусочно-постоянный ввод)
- Минимизация переключения регулятора (кусочно-постоянный ввод)
 - Минимизация переключения регулятора (непрерывный ввод)
- Минимизация переключения регулятора (непрерывный ввод)
Замена топливного члена F в (1) членом, соответствующим выработке выбросов. Например, для выбросов  - минимизация совокупных выбросов. В этом уравнении E - количество выбросов в граммах на лошадиную силу-час (г/л.с.-ч) для каждой позиции регулятора (или регулировки мощности). Кроме того, можно производить минимизацию взвешенной суммы топлива и выбросов.
- минимизация совокупных выбросов. В этом уравнении E - количество выбросов в граммах на лошадиную силу-час (г/л.с.-ч) для каждой позиции регулятора (или регулировки мощности). Кроме того, можно производить минимизацию взвешенной суммы топлива и выбросов.
Таким образом, широко используемая иллюстративная целевая функция имеет вид

Коэффициенты линейной комбинации зависят от важности (веса), присвоенной каждому члену. Заметим, что в уравнении (OP), u(t) - оптимизирующая переменная, т.е. непрерывная позиция регулятора. Если требуется дискретная позиция регулятора, например для более старых локомотивов, решение уравнения (OP) дискретизируется, что может приводить к снижению экономии топлива. Отыскание решения минимального времени (α1 и α2, заданы равным нулю) используется для нахождения нижней границы, предпочтительный вариант осуществления предусматривает решение уравнения (OP) для различных значений Tf при α3 заданном равным нулю. Для тех, кто знаком с решениями таких задач оптимизации, могут потребоваться граничные условия, например, для предельной скорости вдоль пути:
или, если целью является достижение минимального времени, должно выполняться граничное условие, например, полный расход топлива должен быть меньше объема топливного бака, например, в виде:
где WF - топливо, оставшееся в баке на момент Tf. Специалистам в данной области техники очевидно, что уравнение (OP) можно представить в других формах, и что вышеприведенная версия является иллюстративным уравнением для использования согласно вариантам осуществления настоящего изобретения.
Под выбросами в контексте настоящего изобретения в общем случае подразумевается совокупная генерация выбросов в виде оксидов азота (NOx), несгоревших углеводородов и твердых частиц. Конструкция каждого локомотива должна соответствовать стандартам выбросов EPA, и, таким образом, при оптимизации выбросов согласно иллюстративному варианту осуществления настоящего изобретения, это будут совокупные выбросы рейса, на которые в настоящее время нет технических условий. Работа локомотива согласно оптимизированному плану поездки в любое время согласуется со стандартами выбросов EPA. Если основной задачей в ходе поездки является сокращение выбросов, формула оптимального управления, уравнение (OP), видоизменяется с учетом этого требования к поездке. Принципиальная изменчивость процесса оптимизации состоит в том, что любые или все требования к поездке могут изменяться в зависимости от географической области или рейса. Например, для поезда с высоким приоритетом, минимальное время может быть единственным требованием на одном маршруте в силу приоритета поезда. В другом примере выбросы могут изменяться от состояния к состоянию вдоль запланированного маршрута поезда.
Для решения результирующей задачи оптимизации, согласно иллюстративному варианту осуществления, настоящее изобретение предусматривает преобразование динамической задачи оптимизации управления во временном измерении в эквивалентную статическую задачу математического программирования с N искомыми переменными, где число 'N' зависит от частоты, с которой перемещают рычаги регулятора и тормоза, и от продолжительности поездки. Для типичных задач, N может составлять тысячи. Согласно варианту осуществления, поезд движется по 172-мильному участку пути на юго-западе США. С использованием настоящего изобретения, можно реализовать иллюстративный 7,6% расход топлива по сравнению с поездкой, определенной и выполняемой согласно аспектам настоящего изобретения, в отличие от поездки, где положение регулятора/скорость определяет машинист согласно стандартной практике. Повышенная экономия реализуется благодаря оптимизации, достигаемой с использованием иллюстративного варианта осуществления настоящего изобретения, который позволяет вырабатывать стратегию управления, отличающуюся как более низкими потерями на сопротивление, так и малыми или отсутствующими потерями на торможение по сравнению с планом поездки машиниста.
Чтобы сделать вышеописанную оптимизацию вычислительно пригодной, можно применять упрощенную модель поезда, например, показанную на Фиг.2 и представленную рассмотренными выше уравнениями. Принципиальное улучшение оптимального профиля достигается за счет вывода более подробной модели с генерацией оптимальной последовательностью подачи мощности, для проверки, нарушаются ли какие-либо тепловые, электрические и механические ограничения, что приводит к изменению профиля скорости в зависимости от расстояния, которому можно следовать, которого можно добиться без повреждения оборудования локомотива или поезда, т.е. удовлетворяя дополнительно налагаемым ограничениям, например, тепловым или электрическим ограничениям на локомотив и внутрипоездные силы.
Когда поездка начинается 12 (Фиг.1), команды подачи мощности генерируются 14 для начала выполнения плана. В зависимости от рабочих настроек иллюстративного варианта осуществления настоящего изобретения, одна команда предписывает локомотиву выполнять оптимизированную команду подачи мощности 16 для достижения оптимальной скорости. Один вариант осуществления предусматривает получение информации фактической скорости и мощности от локомотивной сцепки поезда 18. В силу общих приближений в моделях, используемых для оптимизации, получается вычисление по замкнутому циклу корректировок оптимизированной мощности для следования нужной оптимальной скорости. Такие корректировки эксплуатационных ограничений поезда могут производиться автоматически или машинистом, который всегда имеет полный контроль над поездом.
В ряде случаев, модель, используемая для оптимизации, может значительно отличаться от фактического поезда. Это может происходить по многим причинам, включая, но без ограничения, дополнительные погрузочно-разгрузочные операции, поломки локомотивов в пути, ошибки в первоначальной базе данных 63 и ошибки машиниста при вводе данных. По этим причинам, система мониторинга использует данные поезда в реальном времени для оценивания параметров локомотива и/или поезда в реальном времени 20. Оцененные параметры сравниваются с предполагаемыми параметрами при первоначальном создании 22 поездки. На основании любых различий между предполагаемыми и оцененными значениями, поездку можно повторно планировать 24. Обычно поездка повторно планируется, если новый план позволяет обеспечить значительную экономию.
Другие причины, почему поездка может быть повторно запланирована, включают в себя директивы из удаленного положения, например, от диспетчера, и/или запрос машиниста на изменение требований в соответствии с глобальными задачами планирования движения. Такие глобальные задачи планирования движения могут включать в себя, но без ограничения, графики других поездов, время, необходимое на рассеяние выхлопных газов в туннеле, операции обслуживания и т.д. Еще одной причиной может быть отказ бортового компонента. Стратегии повторного планирования можно группировать в возрастающие и основные корректировки в зависимости от серьезности нарушения, что рассмотрено более подробно ниже. В общем случае, «новый» план нужно выводить из вышеописанного решения задачи оптимизации уравнение (OP), но зачастую можно находить более быстрые приближенные решения, которые описаны здесь.
В ходе работы, локомотив 42 непрерывно отслеживает эффективность системы и непрерывно обновляет план поездки на основании фактической измеренной эффективности всякий раз, когда такое обновление повышает характеристики поездки. Расчеты повторного планирования можно производить целиком на локомотиве или полностью или частично в удаленном положении, например, в диспетчерской службе или придорожных устройствах обработки, где беспроводная технология позволяет передавать новый план на локомотив 42. Один вариант осуществления настоящего изобретения также предполагает генерацию тенденций эффективности для генерации данных локомотивного парка, касающихся функций переноса эффективности. Данные, относящиеся к парку, можно использовать при определении первоначального плана поездки, и можно использовать для компромиссной оптимизации в масштабе сети с учетом положений совокупности поездов. Например, компромиссная кривая время движения/расход топлива, показанная на Фиг.4, отражает возможности поезда на конкретном маршруте в данное время, обновленные относительно средних по ансамблю, собранных из многочисленных аналогичных поездов на том же маршруте. Таким образом, центральная диспетчерская служба, собирающая кривые наподобие показанной на Фиг.4, от многочисленных локомотивов, может использовать эту информацию для улучшения координации движения всех поездов для достижения преимущества в расходе топлива или пропускной способности в масштабе системы.
Многие события в каждодневной работе могут приводить к необходимости создавать или изменять существующий план, где желательно сохранять одни и те же требования к поездке, на случай, когда поезд отклоняется от расписания для запланированной встречи или обхода с другим поездом, и для этого требуется выделять время. С использованием фактических скорости, мощности и положения локомотива, запланированное время прибытия сравнивается с оцененным на данный момент (прогнозируемым) временем прибытия 25. На основании разницы во времени, а также различия в параметрах (регистрируемых или изменяемых диспетчером или машинистом) план корректируется 26. Эта корректировка может производиться автоматически на основании политики железнодорожной компании по обработке отступлений от плана или вручную, когда машинист поезда и диспетчер совместно ищут наилучший подход к возвращению к плану. Всякий раз, когда план обновляется, но при этом исходные требования, в порядке примера, но не ограничения, время прибытия, остается неизменным, дополнительные изменения одновременно можно учитывать, например, новые будущие изменения предельной скорости, которые повлияют на возможность возвращения к исходному плану. В таких случаях, если исходный план поездки невозможно поддерживать, или, иными словами, поезд не способен отвечать требованиям исходного плана поездки, согласно приведенному здесь рассмотрению, машинисту, удаленной службе и/или диспетчеру можно представить другой план поездки.
Повторное планирование также можно производить, когда желательно изменить исходные требования. Такое повторное планирование можно осуществлять в определенные моменты времени для повторного планирования, вручную по решению машиниста или диспетчера, или автономно, в случае превышения заранее заданных пределов, например, эксплуатационных ограничений поезда. Например, если выполнение текущего плана опаздывает свыше указанного порога, например, тридцати минут, один вариант осуществления настоящего изобретения предусматривает повторное планирование поездки для компенсации задержки ценой увеличения расхода топлива, как описано выше, либо для оповещения машиниста и диспетчера, в какой степени потерянное время можно наверстать, если вообще это возможно, (т.е. каково оставшееся минимальное время или максимальное количество топлива, которое можно сэкономить при временном ограничении). Другие условия для осуществления повторного планирования также можно предусмотреть на основании расхода топлива или работоспособности тяговой сцепки, включающей в себя, но без ограничения, время прибытия, потерю мощности вследствие отказа оборудования и/или временного сбоя в работе оборудования (например, чрезмерного повышения или понижения рабочей температуры), и/или обнаружения грубых ошибок в настройках, например, в расчетной нагрузке поезда. Таким образом, если изменение отражает ухудшение работы локомотива в текущей поездке, их можно вносить в модели и/или уравнения, используемые в процессе оптимизации.
Изменение требований к плану также может быть обусловлено необходимостью координировать события, когда план для одного поезда снижает способность другого поезда отвечать требованиям, и требуется принятие решения на другом уровне, например, в диспетчерском центре. Например, координацию встреч и обходов можно дополнительно усовершенствовать за счет связи между поездами. Таким образом, если машинист знает, что он отстает от расписания в достижении положения встречи и/или обхода, передачи с другого поезда могут консультировать машиниста опаздывающего поезда (и/или диспетчера). Машинист может вводить информацию, относящуюся к ожидаемой задержке прибытия для повторного вычисления плана поездки поезда. Иллюстративный вариант осуществления также можно использовать на высоком уровне, или на уровне сети, чтобы диспетчер мог определить, какой поезд должен снизить или повысить скорость в случае, когда запланированное ограничение время встречи и/или обхода не может быть выполнено. Согласно приведенному здесь рассмотрению, это осуществляется за счет того, что поезда передают данные диспетчеру для принятия решения, как каждый поезд должен изменить свою задачу планирования. Выбор можно делать либо на основании расписания, либо экономии топлива, в зависимости от ситуации.
Для любого повторного планирования, инициируемого вручную или автоматически, иллюстративные варианты осуществления настоящего изобретения могут представлять машинисту более одного плана поездки. Согласно иллюстративному варианту осуществления, настоящее изобретение представляет машинисту разные профили, позволяя машинисту выбирать время прибытия, а также понимать соответствующее влияние топлива и/или выбросов. Такая информация также может предоставляться диспетчеру по аналогичным соображениям, либо в виде простого списка альтернатив, либо в виде совокупности компромиссных кривых, например, показанных на Фиг.4.
Согласно одному варианту осуществления, настоящее изобретение включает в себя способность обучаться и адаптироваться к основным изменениям в поезде и тяговой сцепке, которые могут включаться либо в текущий план и/или в будущее планы. Например, одним из рассмотренных выше инициирующих условий является потеря мощности. При нарастании мощности со временем, либо после потери мощности, либо в начале движения, используется логика переходов для определения, когда будет достигнута нужная мощность. Эта информация может сохраняться в базе данных 61 локомотива для использования при оптимизации либо будущих поездок, либо текущей поездки, если потеря мощности произойдет позже.
На Фиг.3 показан вариант осуществления элементов настоящего изобретения. Локационный элемент 30 определяет положение поезда 31. Локационный элемент 30 содержит датчик или систему датчиков GPS, который определяет положение поезда 31. Примеры таких других систем могут включать в себя, но без ограничения, придорожные устройства, например, метки радиочастотной автоматической идентификации оборудования (RF AEI), диспетчер, и/или определения на основе видеозаписи. Другая система может использовать тахометр(ы) на локомотиве и вычисления расстояния от опорной точки. Согласно вышеприведенному рассмотрению, может быть обеспечена система беспроводной связи 47 для осуществления связи между поездами и/или с удаленным положением, например, диспетчером. Информация о положении поезда также может передаваться с других поездов по системе связи.
Элемент 33 описания пути обеспечивает информацию о пути, в основном, информацию уклона, возвышения и кривизны. Элемент 33 описания пути может включать в себя бортовую базу 36 данных целостности пути. Датчики 38 измеряют тяговое усилие 40, развиваемое локомотивной сцепкой 42, положение рукоятки регулятора локомотивной сцепки 42, информацию конфигурации локомотивной сцепки 42, скорость локомотивной сцепки 142, конфигурацию отдельных локомотивов, возможности отдельных локомотивов и т.д. Согласно иллюстративному варианту осуществления, информация конфигурации локомотивной сцепки 42 может загружаться без использования датчика 38, но вводится иными средствами, как рассмотрено выше. Кроме того, можно учитывать работоспособность локомотивов в сцепке. Например, если один локомотив в сцепке не способен развивать мощность выше 5 позиции регулятора, эта информация используется при оптимизации плана поездки.
Информацию от локационного элемента также можно использовать для определения надлежащего времени прибытия поезда 31. Например, если имеется поезд 31, движущийся вдоль пути 34 к пункту назначения, и позади него нет поездов, и поезд не имеет фиксированного предельного времени прибытия, локационный элемент, включающий в себя, но без ограничения, метки радиочастотной автоматической идентификации оборудования (RF AEI), диспетчер, и/или определения на основе видеозаписи, можно использовать для определения точного положения поезда 31. Кроме того, вводы из этих сигнальных систем можно использовать для корректировки скорости поезда. Используя бортовую базу данных целостности пути, рассмотренную ниже, и локационный элемент, например GPS, один вариант осуществления настоящего изобретения корректирует интерфейс машиниста, чтобы он отражал состояние сигнальной системы при данном положении локомотива. В случае, когда состояния сигнала указывают недопустимые скорости впереди, планировщик может выбрать замедление поезда для экономии расхода топлива.
Информацию от локационного элемента 30 также можно использовать для изменения задач планирования как функции расстояния до пункта назначения. Например, вследствие неизбежных неопределенностей в отношении затора вдоль маршрута, "более быстрые" требования к времени на ранней части маршрута можно применять в качестве защиты от задержек, которые статистически происходят позже. Если в конкретной поездке таких задержек не происходит, требования к более поздней части маршрута можно изменить, чтобы использовать естественный зазор по времени, который накопился ранее, и, таким образом, получить некоторую экономию топлива. Аналогичную стратегию можно применять в отношении требований к ограничению выбросов, например, ограничениям выбросов, которые применяются при приближении к городской области.
В качестве примера защитной стратегии, если поездка запланирована из Нью-Йорка в Чикаго, система может предоставлять возможность вести поезд медленнее в начале поездки, в середине поездки или в конце поездки. Один вариант осуществления настоящего изобретения предусматривает оптимизацию плана поездки, позволяющую снижать скорость в конце поездки, поскольку неизвестные ограничения, в порядке примера, но не ограничения, погодные условия, ремонт пути, и т.д., могут возникнуть и стать известными в ходе поездки. В другом случае, если известны области, где часто случаются заторы, план разрабатывается с возможностью увеличения гибкости управления вокруг таких областей. Таким образом, варианты осуществления настоящего изобретения также могут предусматривать взвешивание/наказание как функцию времени/расстояния в будущем и/или на основании известного/прошлого опыта. Специалистам в данной области техники очевидно, что такое планирование и повторное планирование с учетом погодных условий, состояния пути, наличия других поездов на пути, и т.д., можно рассматривать в любое время в ходе поездки, в котором план поездки соответственно корректируется.
На Фиг.3 дополнительно раскрыты другие элементы, которые могут составлять часть вариантов осуществления настоящего изобретения. Процессор 44 принимает информацию от локационного элемента 30, элемента 33 описания пути и датчиков 38. Алгоритм 46 выполняется на процессоре 44. Алгоритм 46 вычисляет оптимизированный план поездки на основании параметров локомотива 42, поезда 31, пути 34 и требований к рейсу, как описано здесь. Согласно иллюстративному варианту осуществления, план поездки устанавливается на основании моделей поведения поезда, когда поезд 31 движется вдоль пути 34 в виде решения нелинейных дифференциальных уравнений, выведенных из применяемой физики с упрощающими гипотезами, которые предусмотрены в алгоритме. Алгоритм 46 имеет доступ к информации из локационного элемента 30, элемента 33 описания пути и/или датчиков 38 для создания плана поездки, минимизирующего расход топлива локомотивной сцепки 42, минимизирующего выбросы локомотивной сцепки 42, устанавливающего нужное время поездки, и/или гарантирующего правильное рабочее время бригады на локомотивной сцепке 42. Согласно иллюстративному варианту осуществления, предусмотрен также драйвер или элемент управления 51. Согласно приведенному здесь рассмотрению, элемент управления 51 может управлять поездом в ходе выполнения плана поездки. Согласно иллюстративному варианту осуществления, рассмотренному далее, элемент управления 51 автономно принимает решения по управлению поездом. Согласно другому иллюстративному варианту осуществления машинист может предписывать поезду следовать плану поездки или отклоняться от него по своему усмотрению.
План поездки можно модифицировать в реальном времени по мере выполнения плана. Это изменение включает в себя создание первоначального плана поездки на дальнее расстояние, в виду сложности алгоритм оптимизации плана. Когда полная длина профиля поездки превышает данное расстояние, алгоритм 46 можно использовать для разбиения рейса путем деления рейса на промежуточные пункты. Хотя здесь рассматривается только один алгоритм 46, специалистам в данной области техники очевидно, что можно использовать более одного алгоритма, и что такие множественные алгоритмы можно совместно использовать для создания плана поездки. Промежуточные пункты маршрута могут включать в себя естественные положения, где поезд 31 останавливается, в порядке примера, но не ограничения, единичные ответвления магистрали для встречи со встречным движением или для пропускания поезда, идущего позади текущего поезда, сортировочные пути, вспомогательные пути, где вагоны нагружаются и разгружаются, и места запланированных профилактических работ. В таких промежуточных пунктах поезду 31 может потребоваться стоять в течение запланированного времени, останавливаться или двигаться со скоростью в указанном диапазоне. Продолжительность времени от прибытия до отправления в промежуточных пунктах называется временем простоя.
Согласно описываемому варианту осуществления, более длинный маршрут разбивается на более мелкие участки согласно особой системе. Каждый участок может иметь ту или иную длину, но обычно выбирается в естественном положении, например, в положении остановки или значительного ограничения по скорости, или в положении ключевых промежуточных пунктов или путевых знаков, которые задают соединения с другими маршрутами. При таком выборе отрезков или участков маршрута, профиль управления создается для каждого участка пути как функция времени движения, которое рассматривается как независимая переменная, например, как показано на Фиг.4. Компромисс расхода топлива/времени движения, связанный с каждым участком, можно вычислять до того, как поезд 31 достигнет этого участка пути. Таким образом, совокупный план поездки можно создавать из профилей управления, созданных для каждого участка. Один вариант осуществления настоящего изобретения предусматривает оптимальное распределение времени движения по всем участкам маршрута, чтобы удовлетворять требованию суммарного времени поездки и минимизировать полный расход топлива на всех участках. Иллюстративный маршрут, состоящий из трех участков, раскрыт на Фиг.6 и рассмотрен ниже. Однако специалистам в данной области техники очевидно, что, хотя здесь рассматриваются участки, план поездки может содержать единичный участок, представляющий весь маршрут.
На Фиг.4 показан вариант осуществления кривой расхода топлива/времени движения. Как отмечено выше, такая кривая 50 создается при вычислении оптимального профиля поездки для различных времен движения для каждого участка. Таким образом, для данного времени движения 49, расход топлива 52 является результатом подробного профиля управления, вычисление которого описано выше. После назначения времени движения для каждого участка, план мощности/скорости определяется для каждого участка из предварительно вычисленных решений. При наличии каких-либо ограничений по скорости в промежуточном пункте между участками, в порядке примера, но не ограничения, изменения предельной скорости, они согласовываются при создании оптимального профиля поездки. Если ограничения по скорости изменяются только на единичном участке, кривую 50 расхода топлива/времени движения нужно повторно вычислить только для участка изменения. Этот процесс сокращает время, необходимое для повторного вычисления большего количества частей или участков маршрута. Если локомотивная сцепка или поезд претерпевает значительные изменения вдоль маршрута, например, вследствие потери мощности локомотива или погрузки или разгрузки вагонов, то профили управления для всех последующих участков необходимо повторно вычислить для создания новых вариантов кривой 50. Эти новые кривые 50 затем используются совместно с новыми требованиями расписания для планирования оставшейся поездки.
После создания плана поездки, согласно вышеприведенному рассмотрению, график скорости и мощности в зависимости от расстояния позволяет поезду достигать пункта назначения с минимальным расходом топлива и/или объемом выбросов за необходимое время поездки. Существует несколько методов для выполнения плана поездки. Как описано более подробно ниже, согласно иллюстративному варианту осуществления, в тренировочном режиме, информация отображается машинисту, которой машинист должен руководствоваться для достижения необходимой мощности и скорости, определенной согласно оптимальному плану поездки. В этом режиме, эксплуатационная информация представляет собой рекомендованные рабочие состояния, которые машинист должен использовать. Согласно другому иллюстративному варианту осуществления настоящего изобретения, осуществляются действия по управлению для ускорения поезда или поддержания постоянной скорости. Однако, когда поезд 31 должен замедляться, машинист отвечает за торможение путем управления тормозной системой 52. Согласно другому иллюстративному варианту осуществления, обеспечиваются команды разгона и торможения, необходимые для того, чтобы следовать нужному графику скорости-расстояния.
Стратегии управления в режиме обратной связи используются для корректировки последовательности управления мощностью в профиле для учета событий, например, но без ограничения, изменений нагрузки поезда, обусловленных изменениями встречного ветра и попутного ветра. Другая подобная ошибка может быть обусловлена ошибкой в параметрах поезда, в порядке примера, но не ограничения, массы поезда и/или сопротивления, в сравнении с предположениями в оптимизированном плане поездки. Третий тип ошибки может иметь место вследствие некорректной информации в базе данных 36 целостности пути. Еще одна возможная ошибка может быть связана с немоделированными изменениями характеристик, связанных с двигателем локомотива, перегревом тягового двигателя и/или другими факторами. Стратегии управления в режиме обратной связи сравнивают фактическую скорость как функцию позиции со скоростью в нужном оптимальном профиле. На основании этого различия, добавляется коррекция оптимального профиля мощности для приближения фактической скорости к оптимальному профилю. Чтобы обеспечить устойчивую регулировку, можно предусмотреть алгоритм компенсации, который фильтрует скорости обратной связи в корректировки мощности для обеспечения стабильности управления по замкнутому циклу. Компенсация может включать в себя стандартную динамическую компенсацию, которую специалисты по проектированию систем управления используют для обеспечения нужных характеристик.
Согласно различным аспектам настоящее изобретение обеспечивает простейшие и поэтому самые быстрые методы адаптации к изменениям требований к поездке, которые являются скорее правилом, чем исключением в работе железной дороги. Согласно иллюстративному варианту осуществления, для определения движения с оптимальным расходом топлива из точки A в точку B при наличии остановок вдоль пути, и для обновления плана поездки для оставшейся части маршрута после начала поездки, можно использовать почти оптимальный метод разложения для нахождения оптимального профиля поездки. Используя методы моделирования, способ вычисления позволяет находить план поездки с указанными временем движения и начальной и конечной скоростями, удовлетворяющий всем ограничениям скорости и возможностей локомотива при наличии остановок. Хотя нижеследующее рассмотрение относится к оптимизации расхода топлива, его также можно применять для оптимизации других факторов, в порядке примера, но не ограничения, выбросов, расписания, комфорта бригады и влияния нагрузки. Способ можно использовать в начале, при разработке плана поездки, и, что более важно, для адаптации к изменению требований после начала поездки.
Варианты осуществления настоящего изобретения могут использовать настройку, показанную в логической блок-схеме (Фиг.5) и в качестве иллюстративного примера трех участков, подробно показанных на Фиг.6. Показано, что маршрут можно разбить на два или более участков, T1, T2 и T3, хотя согласно приведенному здесь рассмотрению, можно рассматривать маршрут как единичный участок. Согласно приведенному здесь рассмотрению, границы участка могут не образовывать участки одинаковой длины. Вместо этого, участки используют естественные или зависящие от рейса границы. Оптимальные планы поездки предварительно вычисляются для каждого участка. Если расход топлива в зависимости от времени поездки является требованием к поездке, подлежащим удовлетворению, кривые расхода топлива в зависимости от времени поездки строятся для каждого участка. Согласно приведенному здесь рассмотрению, можно строить кривые на основании других факторов, причем факторы представляют собой требования, которым должен отвечать план поездки. Когда время поездки является параметром, подлежащим определению, вычисляется время поездки для каждого участка с учетом ограничений на полное время поездки. На Фиг.6 показаны предельные скорости для иллюстративного 200-мильного маршрута, состоящего из трех участков 97. Дополнительно проиллюстрированы изменения уклона на 200-мильном маршруте 98. Показана также комбинированная диаграмма 99, где изображены кривые расхода топлива для каждого участка маршрута в зависимости от времени движения.
Используя вышеописанную оптимальную настройку управления, данный способ вычисления позволяет находить план поездки с указанными временем движения и начальной и конечной скоростями, удовлетворяющий всем ограничениям скорости и возможностей локомотива при наличии остановок. Хотя нижеследующее подробное рассмотрение относится к оптимизации расхода топлива, его можно применять для оптимизации других факторов согласно приведенному здесь рассмотрению, в порядке примера, но не ограничения, выбросов. Способ позволяет устанавливать нужные периоды простоя на остановках и учитывать ограничения на самое раннее прибытие и отправление в положении, которые могут потребоваться, например, при работе на одном пути, когда время входа или прохода ветки является критическим.
Варианты осуществления настоящего изобретения предусматривают нахождение движения с оптимальным расходом топлива на расстоянии от D0 до DM, пройденном за время T, с M-1 промежуточными остановками в D1,..., DM-1 и с временами прибытия и отправления в этих остановках, ограниченными

где tarr(Di), tdep(Di) и Δti - время прибытия, отправления и минимальное время остановки в i-й остановке, соответственно. Предполагая, что оптимизация расхода топлива предусматривает минимизацию времени остановки, получаем tdep(Di) = tarr(Di) + Δti, что исключает необходимость во втором из вышеприведенных неравенств.
Пусть для каждого i = 1,..., M, движение с оптимальным расходом топлива из Di-1 в Di за время движения t, Tmin(i) ≤ t ≤ Tmax(i), известно. Пусть Fi(t) - расход топлива, соответствующий этой поездке. Если время движения из Dj-1 в Dj обозначить Tj, то время прибытия в Di определяется как
где Δt0 задано равным нулю. Движение с оптимальным расходом топлива из D0 в DM за время движения T получается путем нахождения Ti, i = 1,..., M, что минимизирует
при условии, что

После начала поездки производится повторное определение решения, оптимального по расходу топлива для остального маршрута (первоначально из D0 в DM за время T) по мере прохождения маршрута, но где возмущения препятствуют следованию решению, оптимальному по расходу топлива. Обозначим текущие расстояние и скорость x и v, соответственно, где Di-1<x≤Di. Кроме того, обозначим текущее время с начала поездки tact. Тогда решение, оптимальное по расходу топлива, для остального маршрута от x до DM, которое сохраняет исходное время прибытия в DM, получается путем нахождения  , что минимизирует
, что минимизирует
при условии, что
Здесь  это расход топлива при оптимальной поездке из x в Di, совершенной за время t, с первоначальной скоростью в x равной v.
это расход топлива при оптимальной поездке из x в Di, совершенной за время t, с первоначальной скоростью в x равной v.
Как рассмотрено выше, иллюстративный процесс для обеспечения более эффективного повторного планирования строит оптимальное решение для поездки от остановки к остановке из разделенных участков. Для каждой поездки из Di-1 в Di, с временем движения Ti выбираем набор промежуточных точек Dij, j = 1,..., Ni-1. Пусть Di0 = Di-1 и  . Затем выражаем расход топлива для оптимальной поездки из Di-1 в Di как
. Затем выражаем расход топлива для оптимальной поездки из Di-1 в Di как
где:  - расход топлива для оптимальной поездки из Di,j-1 в Dij, совершенной за время t, с начальной и конечной скоростями vi,j-1 и vij. Кроме того, tij это время оптимальной поездки, соответствующее расстоянию Dij. По определению,
- расход топлива для оптимальной поездки из Di,j-1 в Dij, совершенной за время t, с начальной и конечной скоростями vi,j-1 и vij. Кроме того, tij это время оптимальной поездки, соответствующее расстоянию Dij. По определению,  . Поскольку поезд останавливается в Di0 и
. Поскольку поезд останавливается в Di0 и  ,
,  .
.
Вышеприведенное выражение позволяет альтернативно определить функцию Fi(t), первоначально определив функции fij(·), 1 ≤ j ≤ Ni, а затем найдя τij, 1 ≤ j ≤ Ni, и vij, 1 ≤ j <Ni, что минимизирует
при условии, что
Выбирая Dij (например, в точках ограничения скорости или точках встречи), можно минимизировать vmax(i,j) - vmin(i,j), тем самым минимизируя область, в которой нужно знать fij().
На основании вышеописанного разбиения, упрощенный подход к почти оптимальному повторному планированию по сравнению с описанным выше ограничивает повторное планирование временами, когда поезд в точках Dij, 1 ≤ i ≤ M, 1 ≤ j ≤ Ni. В точке Dij, новую оптимальную поездку из Dij в DM можно определить путем нахождения  и
и  , что минимизирует
, что минимизирует

при условии, что

где
Дополнительное упрощение получается в результате повторного вычисления Tm, i <m ≤ M, по достижении точки Di. Таким образом, в точках Dij между Di-1 и Di, вышеописанную минимизацию нужно осуществлять только по τik, j < k ≤ Ni, vik, j < k ≤ Ni. Это увеличение затем компенсируется, если возможно, путем повторного вычисления Tm, i < m ≤ M, в точке Di.
В отношении раскрытой выше конфигурации замкнутого цикла, совокупное энергопотребление, необходимое для движения поезда 31 из точки A в точку B составляет сумму четырех компонентов, в частности: разницы в кинетической энергии между точками A и B; разницы в потенциальной энергии между точками A и B; потерь энергии вследствие трения и других потерь на сопротивление; и энергии, выделяющейся при торможении. Предполагая, что начальная и конечная скорости равны (например, нулю), получаем, что первый компонент равен нулю. Кроме того, второй компонент не зависит от стратегии управления. Таким образом, достаточно минимизировать сумму двух последних компонентов.
Следование профилю постоянной скорости минимизирует потери на сопротивление. Следование профилю постоянной скорости также минимизирует совокупное энергопотребление, когда торможение не нужно для поддержания постоянной скорости. Однако, если торможение требуется для поддержания постоянной скорости, торможение только для поддержания постоянной скорости скорее всего приведет к увеличению совокупного энергопотребления вследствие необходимости компенсировать потери энергии, выделяющейся при торможении. Существует возможность, что некоторое торможение может в действительности снизить совокупное энергопотребление, если дополнительные потери на торможение с избытком компенсируются результирующим снижением потерь на сопротивление, обусловленных торможением, за счет уменьшения изменения скорости.
По завершении вышеописанного повторного планирования на основании совокупности событий, можно выполнять новый оптимальный план позиции регулятора/скорости с использованием описанного здесь управления по замкнутому циклу. Однако в ряде случаев может не быть достаточно времени для осуществления вышеописанного планирования с разбиением на участки, и в частности, при наличии критических ограничений по скорости, которые необходимо учитывать, альтернатива может быть предпочтительной. Один вариант осуществления настоящего изобретения предусматривает такой альтернативный алгоритм именуемый "интеллектуальное поддержание скорости". Интеллектуальный алгоритм поддержания скорости является эффективным процессом для генерации, в реальном времени, экономичного по энергии (следовательно, экономичного по топливу и/или экономичного по выбросам) почти оптимального предписания по управлению поездом 31 на известной местности. Этот алгоритм учитывает информацию позиции поезда 31 вдоль пути 34 в любое время, а также информацию уклона и кривизны пути в зависимости от позиции. Способ опирается на модель точечной массы для движения поезда 31, параметры которой можно адаптивно оценивать из оперативных измерений движения поезда согласно описанному выше.
Интеллектуальный алгоритм поддержания скорости имеет три основных компонента, в частности: модифицированный профиль предельной скорости, который служит энергетически экономичным руководством по снижению предельной скорости; идеальный профиль регулировки позиции регулятора или динамического тормоза, который пытается балансировать между минимизацией изменений скорости и торможения; и механизм для объединения последних двух компонентов для выработки команды регулятора, реализующей цикл обратной связи по скорости для компенсации расхождений между модельными параметрами и реальными параметрами. Интеллектуальное поддержание скорости позволяет применять стратегии согласно вариантам осуществления настоящего изобретения без активного торможения (т.е. драйвер получает сигнал и предположительно обеспечивает необходимое торможение) или согласно варианту, предусматривающему активное торможение.
В отношении алгоритма поддержания скорости, который не управляет динамическим торможением, три иллюстративных компонента представляют собой модифицированный профиль предельной скорости, который служит энергетически экономичным руководством по снижению предельной скорости, сигнал извещения, призванный извещать машиниста, когда нужно применять торможение, идеальный профиль регулятора, который пытается балансировать между минимизацией изменений скорости и извещением машиниста о необходимости торможения, и механизм, использующий цикл обратной связи для компенсации расхождений между модельными параметрами и реальными параметрами.
Аспекты настоящего изобретения также предусматривают подход к определению значений основных параметров поезда 31. Например, в отношении оценивания массы поезда, можно использовать фильтр Калмана и рекурсивный метод наименьших квадратов для выявления ошибок, которые могут развиться с течением времени.
На Фиг.7 показана логическая блок-схема настоящего изобретения. Удаленная служба, например диспетчерский центр 60 может обеспечивать информацию для использования согласно настоящему изобретению. Показано, что такая информация поступает на исполнительный элемент управления 62. На исполнительный элемент управления 62 также поступают данные из информационной базы данных 63 для моделирования локомотива, данные из базы данных 36 целостности пути, в порядке примера, но не ограничения, информация уклона пути и информация предельной скорости, оценочные параметры поезда, в порядке примера, но не ограничения, весовой коэффициент и коэффициент сопротивления поезда, и таблицы скорости расхода топлива из блока оценки скорости расхода топлива 64. Исполнительный элемент управления 62 выдает информацию на планировщик 12, что раскрыто более подробно на Фиг.1. После вычисления плана поездки, план поступает на консультант по управлению, драйвер или элемент управления 51. План поездки также поступает на исполнительный элемент управления 62, что позволяет ему сравнивать поездку при поступлении других новых данных.
Как рассмотрено выше, консультант 51 по управлению может автоматически задавать мощность в соответствии с позицией регулятора, либо заранее установленную позицию регулятора, либо оптимальную непрерывную мощность в соответствии с позицией регулятора. Помимо подачи команды скорости на локомотив 31, предусмотрен дисплей 68, который позволяет машинисту видеть рекомендации планировщика. Машинист также имеет доступ к панели 69 управления. Посредством панели управления 69 машинист может решать, применять ли рекомендуемую мощность в соответствии с позицией регулятора. По этой причине, машинист может ограничивать назначенную ли рекомендуемую мощность. Таким образом, в любое время машинист всегда имеет полный контроль над регулировкой мощности для эксплуатации локомотивной сцепки, в том числе, может решать, применять ли тормоза, если план поездки рекомендует замедлить поезд 31. Например, при работе в темное время суток, или в условиях, когда придорожное оборудование не может электронными средствами передавать информацию на поезд, и, вместо этого, машинист наблюдает визуальные сигналы от придорожного оборудования, машинист вводит команды на основании информации, содержащейся в базе данных целостности пути, и визуальных сигналов от придорожного оборудования. На основании режима работы поезда 31, информация, относящаяся к измерению топлива, поступает на блок 64 оценки скорости расхода топлива. Поскольку прямое измерение потоков топлива обычно невозможно на локомотивной сцепке, вся информация о расходе топлива до сих пор в течение поездки и прогнозируемом расходе топлива согласно оптимальным планам получается с использованием калиброванных физических моделей, например, используемых при разработке оптимальных планов. Например, такие прогнозы могут включать в себя, но без ограничения, использование измеренной полной мощности и известных топливных характеристик для вывода полного расхода топлива.
Поезд 31 также имеет локационное устройство 30, например датчик GPS, рассмотренный выше. Информация поступает на блок 65 оценки параметров поезда. Такая информация может включать в себя, но без ограничения, данные датчика GPS, данные тягового/тормозящего усилия, данные состояния торможения, данные скорости и любых изменений скорости. Совместно с информацией, относящейся к уклону и предельной скорости, информация веса и коэффициента сопротивления поезда поступает на исполнительный элемент управления 62.
Вариант осуществления настоящего изобретения также предусматривает использование непрерывно изменяющейся мощности в ходе оптимизации планирования и реализации управления по замкнутому циклу. В традиционном локомотиве, мощность обычно квантуется на восемь дискретных уровней. Современные локомотивы могут реализовать непрерывное изменение мощности, что можно использовать в вышеописанных способах оптимизации. При непрерывной регулировке мощности, локомотив 42 может дополнительно оптимизировать рабочие состояния, например, путем минимизации вспомогательных нагрузок и потерь при передаче мощности, и точной регулировки диапазонов мощности двигателя, соответствующих оптимальной эффективности или до точек границ повышенных выбросов. Примеры включают в себя, но без ограничения, минимизацию потерь в системе охлаждения, регулировку напряжений генератора переменного тока, регулировку оборотов двигателя и сокращение количества ведущих осей. Кроме того, локомотив 42 может использовать бортовую базу 36 данных целостности пути и прогнозируемые требования к производительности для минимизации вспомогательных нагрузок и потерь при передаче мощности для обеспечения оптимальной эффективности для назначенного расхода топлива/выбросов. Примеры включают в себя, но без ограничения, сокращение количества ведущих осей на ровной местности и предварительное охлаждение двигателя локомотива до входа в туннель.
Вариант осуществления настоящего изобретения также предусматривает использование бортовой базы 36 данных целостности пути и прогнозируемой производительности для регулировки работы локомотива, например, чтобы гарантировать, что поезд имеет достаточную скорость при подходе к холму и/или туннелю. Например, это можно выразить как ограничение скорости в конкретном положении, которое становится частью оптимального плана, создаваемого при решении уравнения (OP). Дополнительно, вариант осуществления может предусматривать правила управления поездом, в порядке примера, но не ограничения, темпы роста тягового усилия и максимальные темпы роста тормозящего усилия. Их можно непосредственно включить в формулу оптимального профиля поездки или, альтернативно, включить в регулятор замкнутого цикла, используемого для управления подачи мощности для достижения назначенной скорости.
Согласно предпочтительному варианту осуществления, настоящее изобретение установлено только на головном локомотиве железнодорожного состава. Хотя, согласно определенным аспектам, настоящее изобретение не зависит от данных или взаимодействий с другими локомотивами, его можно объединить с блоком управления локомотивной сцепкой, функциональными возможностями и/или функциональными возможностями оптимизатора локомотивной сцепки для повышения эффективности. Взаимодействие с множественными поездами не запрещено, что показано на описанном здесь примере диспетчера, принимающего решения относительно двух "независимо оптимизированных" поездов.
Поезда с распределенными энергетическими системами могут работать в разных режимах. В одном режиме все локомотивы в поезде работают по одной и той же команде регулятора. Если головной локомотив получает команду работать в позиции регулятора №8, все звенья поезда получают команду развивать мощность согласно позиции регулятора №8. В "независимом" режиме управления, локомотивы или сцепки локомотивов, распределенные по поезду, могут работать на разных движущих или тормозящих мощностях. Например, когда поезд достигает вершины горы, головные локомотивы (на спуске с горы) можно перевести в режим торможения, тогда как локомотивы посередине или в хвосте поезда (на подъеме на гору) могут находиться в движущем режиме. Это делается для того, чтобы минимизировать силы натяжения на механических автосцепках, соединяющих вагоны и локомотивы. Традиционно, работа распределенной энергетической системы в «независимом» режиме требует от машиниста вручную подавать команды каждому удаленному локомотиву или набору локомотивов через дисплей на головном локомотиве. С использованием модели планирования на физической основе, информации настроек поезда, бортовой базы данных целостности пути, бортовых правил эксплуатации, системы определения местоположения, управления разгоном/торможением по замкнутому циклу в реальном времени и сенсорной обратной связи, система автоматически управляет распределенной энергетической системой в «независимом» режиме.
При работе в режиме распределенной подачи мощности, машинист на головном локомотиве может управлять рабочими функциями удаленных локомотивов в удаленных сцепках посредством системы управления, например элемента распределенного управления мощностью. Таким образом, при работе в режиме распределенной подачи мощности, машинист может отдавать команду разным локомотивным сцепкам работать на разных уровнях мощности в соответствии с позицией регулятора (или одной сцепке работать в движущем режиме, а другой - в тормозящем), причем каждый отдельный локомотив в локомотивной сцепке работает на одной и той же мощности в соответствии с позицией регулятора. Согласно иллюстративному варианту осуществления, когда настоящее изобретение установлено на поезде, предпочтительно, с возможностью связи с элементом распределенного управления мощностью, когда нужен уровень мощности в соответствии с позицией регулятора для удаленной локомотивной сцепки, рекомендуемый согласно оптимизированному плану поездки, иллюстративный вариант осуществления настоящего изобретения предусматривает передачу этой регулировки мощности на удаленные локомотивные сцепки для реализации. Как рассмотрено ниже, торможение реализуется аналогичным образом.
Вариант осуществления настоящего изобретения можно использовать применительно к сцепкам, в которых локомотивы не примыкают друг к другу, например, один или несколько локомотивов располагаются спереди, другие в середине и в конце поезда. Такие конфигурации называются конфигурациями с распределенной мощностью, в которых стандартное соединение между локомотивами заменено каналом радиосвязи или вспомогательным кабелем для внешней связи локомотивов. При работе в режиме распределенной подачи мощности, машинист на головном локомотиве может управлять рабочими функциями удаленных локомотивов в сцепке посредством системы управления, например элемента распределенного управления мощностью. В частности, при работе в режиме распределенной подачи мощности, машинист может отдавать команду разным локомотивным сцепкам работать на разных уровнях мощности в соответствии с позицией регулятора (или одной сцепке работать в движущем режиме, а другой - в тормозящем), причем каждый отдельный локомотив в локомотивной сцепке работает на одной и той же мощности в соответствии с позицией регулятора.
Когда настоящее изобретение установлено на поезде, предпочтительно, с возможностью связи с элементом распределенного управления мощностью, когда нужен уровень мощности в соответствии с позицией регулятора для удаленной локомотивной сцепки, рекомендуемый согласно оптимизированному плану поездки, вариант осуществления настоящего изобретения предусматривает передачу регулируемого параметра мощности на удаленные локомотивные сцепки для реализации. Как рассмотрено ниже, торможение реализуется аналогичным образом. При работе в режиме распределенной подачи мощности, вышеописанную задачу оптимизации можно расширить, для обеспечения дополнительных степеней свободы, в том смысле, что каждым удаленным звеном можно независимо управлять с головного звена. Преимущество этого подхода в том, что дополнительные требования или ограничения, касающиеся внутрипоездных сил, можно включить в функцию производительности, предполагая, что модель, отражающая внутрипоездные силы, также включена. Таким образом, различные аспекты настоящего изобретения могут включать в себя использование множественных настроек регулятора для лучшего управления внутрипоездными силами, а также расходом топлива и выбросами.
В поезде, где используется блок управления локомотивной сцепкой, головной локомотив в локомотивной сцепке может работать на другой позиции регулятора мощности, чем другие локомотивы в этой сцепке. Другие локомотивы в сцепке работают на одной и той же позиции регулятора мощности. Варианты осуществления настоящего изобретения можно использовать совместно с блоком управления локомотивной сцепкой для передачи позиции регулятора мощности на локомотивы в сцепке. Таким образом, поскольку блок управления локомотивной сцепкой делит локомотивную сцепку на две группы, головной локомотив и хвостовые звенья, головной локомотив получает команду работать на определенной мощности в соответствии с позицией регулятора, и хвостовые локомотивы могут получать команду работать на другой мощности в соответствии с позицией регулятора. Согласно иллюстративному варианту осуществления, элемент распределенного управления мощностью может представлять собой систему и/или устройство, где осуществляется эта операция.
Аналогично, когда оптимизатор локомотивной сцепки используется с локомотивной сцепкой, вариант осуществления настоящего изобретения можно использовать совместно с оптимизатором локомотивной сцепки для определения мощности в соответствии с позицией регулятора для каждого локомотива в локомотивной сцепке. Например, предположим, что план поездки рекомендует четвертую позицию регулятора мощности для локомотивной сцепки. На основании положения поезда, оптимизатор локомотивной сцепки использует эту информацию и затем определяет позицию регулятора мощности для каждого локомотива в сцепке. В этой реализации, эффективность задания позиций регулятора мощности по внутрипоездным каналам связи повышается. Кроме того, как рассмотрено выше, реализация этой конфигурации может осуществляться с использованием распределенной системы управления.
Кроме того, согласно вышеприведенному описанию, вариант осуществления настоящего изобретения можно использовать для непрерывной корректировки и повторного планирования, когда железнодорожный состав использует торможение, на основании предстоящих предметов, представляющих интерес, в порядке примера, но не ограничения, железнодорожных переездов, изменений уклона, приближающихся ответвлений, приближающихся депо и приближающихся заправочных станций, где каждому локомотиву в сцепке может потребоваться отдельная регулировка торможения. Например, если поезд идет через холм, головной локомотив может войти в состояние торможения, тогда как удаленные локомотивы, еще не достигшие вершины холма, могут оставаться в движущем состоянии.
На Фиг.8, 9 и 10 изображены динамические дисплеи для использования машинистом. На Фиг.8 показан предоставленный профиль поездки 72. В профиле указано положение 73 локомотива. Также обеспечена такая информация, как длина поезда 105 и количество вагонов 106 в поезде. Также предусмотрены элементы, касающиеся уклона пути 107, элементы 108 кривизны и придорожных устройств, включающие в себя положение моста 109 и скорость поезда 110. Дисплей 68 позволяет машинисту просматривать такую информацию, а также видеть положение поезда вдоль маршрута. Предоставляется информация, относящаяся к расстоянию и/или оценочному времени до таких мест, как переезды 112, сигналы 114, изменения скорости 116, реперы 118 и пункты назначения 120. Также предусмотрен прибор контроля времени прибытия 125, который позволяет пользователю определить экономию топлива, реализуемую в ходе поездки. Машинист имеет возможность изменять время прибытия 127 и определять, как это влияет на экономию топлива. Согласно приведенному здесь рассмотрению, специалистам в данной области техники очевидно, что экономия топлива является иллюстративным примером лишь одной задачи, которую можно решать с помощью инструмента управления. Таким образом, в зависимости от наблюдаемого параметра, другие параметры, рассмотренные здесь можно наблюдать и оценивать с помощью инструмента управления, рассматриваемого машинистом. Машинисту также предоставляется информация, относящаяся к продолжительности времени, в течение которого бригада работает на поезде. В иллюстративных вариантах осуществления, информация времени и расстояния может быть представлена либо как время и/или расстояние до конкретного события и/или положения, либо как полное истекшее время.
Как показано на Фиг.9, дисплей обеспечивает информацию о данных 130 сцепки, график событий и ситуаций 132, прибор контроля времени прибытия 134 и исполнительные кнопки 136. Кроме того, на этом дисплее предоставляется информация аналогичная рассмотренной выше. В этом дисплее 68 также предусмотрены исполнительные кнопки 138, позволяющие машинисту перепланировать, а также отключать 140 устройство согласно различным вариантам осуществления настоящего изобретения.
На Фиг.10 представлен другой вариант осуществления дисплея. На нем отображается типичная информация для современного локомотива, включающая в себя состояние 72 пневматических тормозов, аналоговый спидометр с цифровой вставкой 74, и информацию о тяговом усилии в фунтах силы (или амперах тяги для локомотивов постоянного тока). Индикатор 74 показывает текущую оптимальную скорость согласно исполняемому плану, а также график акселерометра в дополнение к показанию в миль/час/мин. В центре экрана располагаются важные новые данные для выполнения оптимального плана, включающие в себя прокручиваемый ленточный график 76, отражающий оптимальную скорость и позицию регулятора в зависимости от расстояния по сравнению с текущей историей этих переменных. В этом варианте осуществления, положение поезда определяется с использованием локационного элемента. Показано, что положение обеспечивается путем определения, насколько далеко находится поезд от своего конечного пункта назначения, абсолютной позиции, первоначального пункта назначения, промежуточного пункта и/или ввода машиниста.
Ленточная диаграмма обеспечивает прогнозирование изменений скорости необходимых для выполнения оптимального плана, что полезно при ручном управлении, и отслеживает соотношение плана с фактическими данными в ходе автоматического управления. Согласно приведенному здесь рассмотрению, например, в тренировочном режиме, машинист может следовать позиции регулятора или скорости, предложенным настоящим изобретением. Вертикальная полоска обеспечивает график нужной и фактической позиции регулятора, которые также отображаются в цифровом виде под ленточной диаграммой. При использовании непрерывной регулировки мощности, как рассмотрено выше, дисплей будет просто производить округление к ближайшему дискретному эквиваленту, причем дисплей может быть аналоговым дисплеем, на котором отображается аналоговый эквивалент или процент или фактическая мощность/тяговое усилие.
Критическая информация о статусе поездки отображается на экране, где показан текущий уклон 88 пути, на котором находится поезд или головной локомотив, какое-то место поезда, или средний уклон по длине поезда. Также показаны совокупное расстояние, пройденное по плану 90, полный расход топлива 92, положение или расстояние до следующей запланированной остановки 94 и текущее и предполагаемое время прибытия 96 на следующую остановку. Дисплей 68 также показывает максимально возможное время до пункта назначения согласно вычисленным планам. Если требуется более позднее прибытие, выполняется повторное планирование. Данные коррекции плана показывают состояние расхода топлива и расписания с опережением или отставанием от текущего оптимального плана. Отрицательные числа означают меньший расход топлива или опережение по сравнению с планом, положительные числа означают больший расход топлива или отставание по сравнению с планом. Обычно эти параметры компенсируют друг друга в противоположных направлениях (замедление для экономии топлива приводят к задержке поезда и наоборот).
В любое время эти дисплеи 68 дают машинисту мгновенную картину статуса поездки в отношении установленного на данный момент плана управления. Этот дисплей показан исключительно в иллюстративных целях, и существует много других способов отображения/передачи этой информации машинисту и/или диспетчеру. По этой причине, любые другие раскрытые выше элементы информации можно добавлять на дисплей для обеспечения дисплея, который отличается от раскрытого.
Другие признаки, которые могут быть включены в варианты осуществления настоящего изобретения, включают в себя, но без ограничения, генерирование (формирование) журналов данных и отчетов. Эта информация может храниться на поезде и загружаться в небортовую систему. Загрузки можно осуществлять посредством ручной и/или беспроводной передачи. Эту информацию также может наблюдать машинист на локомотивном дисплее. Данные могут включать в себя такую информацию, как, но без ограничения, вводы машиниста, время работы системы, экономию топлива, дисбаланс топлива между локомотивами в поезде, отклонение движения поезда от расписания и вопросы диагностики системы, например, неисправность датчика GPS.
Поскольку планы поездки также должны учитывать допустимое рабочее время бригады, варианты осуществления настоящего изобретения могут учитывать такую информацию при планировании поездки. Например, если максимальное время, в течение которого бригада может работать, составляет восемь часов, то поездку можно запланировать так, чтобы она включала в себя остановку, на которой новая бригада может сменить действующую бригаду. Такие указанные положения остановки могут включать в себя, но без ограничения, сортировочные станции, положения встречи/обхода и т.д. Если, в ходе поездки, время поездки может быть превышено, машинист может отказаться от иллюстративного варианта осуществления настоящего изобретения в пользу других критериев, определенных машинистом. В конце концов, независимо от рабочего состояния поезда, в порядке примера, но не ограничения, высокой нагрузки, низкой скорости, условий растяжения поезда, и т.д., машинист оставляет за собой право устанавливать безопасную скорость и/или рабочее состояние поезда.
Согласно разным аспектам настоящего изобретения, поезд может работать в совокупности разных рабочих концепций. В одной рабочей концепции настоящее изобретение обеспечивает команды, определяющие тягу и динамическое торможение. Машинист управляет всеми остальными функциями поезда. В другой рабочей концепции, настоящее изобретение обеспечивает только команды, определяющие тягу. Машинист управляет динамическим торможением и всеми остальными функциями поезда. В еще одной рабочей концепции, настоящее изобретение обеспечивает команды, определяющие тягу, динамическое торможение и пневматическое торможение. Машинист управляет всеми остальными функциями поезда.
Варианты осуществления настоящего изобретения также можно использовать путем извещения машиниста о предстоящих предметах, представляющих интерес, о действиях, которые нужно будет предпринять, например, за счет прогнозирующей логики настоящего изобретения, непрерывной корректировки и повторного планирования оптимизированного плана поездки, базы данных целостности пути. Машинист может также получать извещения о находящихся впереди переездах, сигналах, изменениях уклона, тормозящих действиях, ответвлениях, сортировочных станциях, заправочных станциях, и т.д. Эти извещения могут сообщаться посредством звука и/или интерфейса машиниста.
В частности с использованием модели планирования на физической основе, информации настроек поезда, бортовой базы данных целостности пути, бортовых правил эксплуатации, системы определения местоположения, управления разгоном/торможением по замкнутому циклу в реальном времени, и сенсорной обратной связи, система предлагает и/или предписывает машинисту совершать необходимые действия. Извещение может быть визуальным и/или звуковым. Примеры включают в себя извещение о переездах, которые требуют, чтобы машинист активировал свисток и/или сигнал локомотива, извещение о «тихих» переездах, которые не требуют, чтобы машинист активировал свисток или сигнал локомотива.
Согласно другому варианту осуществления, с использованием модели планирования на физической основе рассмотренный выше, информации настроек поезда, бортовой базы данных целостности пути, бортовых правил эксплуатации, системы определения местоположения, управления разгоном/торможением по замкнутому циклу в реальном времени, и сенсорной обратной связи, вариант осуществления настоящего изобретения предусматривает представление машинисту информации (например, показания на дисплее), которая позволяет машинисту видеть, когда поезд приходит в различные места, как показано на Фиг.9. Система позволяет машинисту корректировать план поездки (предписанное время прибытия). Эта информация (фактическое оценочное время прибытия или информация, необходимая для принятия решения не на поезде) также может передаваться в диспетчерский центр, чтобы диспетчер или система диспетчеризации мог(ла) корректировать предписанное время прибытия. Это позволяет системе быстро корректировать и оптимизировать соответствующую целевую функцию (например, согласующую скорость и расход топлива).
На основании вышеприведенной информации, иллюстративные варианты осуществления настоящего изобретения можно использовать для определения положения поезда 31 на пути, этап 18. Определение характеристики пути также может осуществляться, например, с использованием блока оценки параметров поезда 65. План поездки можно создавать на основании положения поезда, характеристики пути и рабочего состояния, по меньшей мере, одного локомотива поезда. Кроме того, требование к оптимальной мощности может передаваться на поезд, в котором машинист поезда может направляться на локомотив, локомотивную сцепку и/или поезд в соответствии с оптимальной мощностью, например, через систему беспроводной связи 47. В другом примере, вместо направления машиниста поезда, поезд 31, локомотивная сцепка 18, и/или локомотив может автоматически управляться на основании оптимальной регулировки мощности.
Дополнительно, способ также может предусматривать определение регулировок мощности или команд подачи мощности 14, для локомотивной сцепки 18, на основании плана поездки. Затем локомотивная сцепка 18 работает в соответствии с регулировкой мощности. Можно собирать рабочие параметры поезда и/или локомотивной сцепки, в порядке примера, но не ограничения, фактическую скорость поезда, фактическую регулировку мощности локомотивной сцепки и положение поезда. По меньшей мере, один из этих параметров можно сравнивать с регулировкой мощности, на которой предписано работать локомотивной сцепке.
Согласно другому варианту осуществления, способ может предусматривать определение рабочих параметров 62 поезда и/или локомотивная сцепка. Нужный рабочий параметр определяет на основании определенных рабочих параметров. Определенный параметр сравнивается с рабочим параметром. При обнаружении различия, план поездки корректируется, этап 24.
Еще один вариант осуществления может предусматривать способ определения положения поезда 31 на пути 34. Также определяется характеристика пути 34. План поездки, или план управления, разрабатывается, или генерируется для минимизации расхода топлива. План поездки может генерироваться на основании положения поезда, характеристики пути и/или рабочего состояния локомотивной сцепки 18 и/или поезда 31. Согласно аналогичному способу, когда положение поезда на пути определено, и характеристика пути известна, предусмотрены управление тягой и/или команды регулятора для минимизации расхода топлива.
На Фиг.12 показан вариант осуществления системы с замкнутым циклом для эксплуатации железнодорожного транспортного средства. Показано, что оптимизатор движения 650, преобразователь 652, железнодорожное транспортное средство 653, и, по меньшей мере, один выход 654, в порядке примера, но не ограничения, скорость, выбросы, тяговое усилие, мощность, песок и т.д., входят в состав системы связи 657 с управлением по замкнутому циклу. Выход 654 может определяться датчиком 656, который составляет часть железнодорожного транспортного средства 653, или, согласно другому иллюстративному варианту осуществления, действует независимо от железнодорожного транспортного средства 653. Например, в отношении песка, определение производится, например, датчиком, а именно, количество песка, выбрасываемого для предотвращения проскальзывания железнодорожных колес. Специалистам в данной области техники очевидно, что аналогичные соображения применимы к другим выходам, упомянутым выше. Информация, первоначально выводимая из информации, полученной от оптимизатора движения 650 и/или регулятора, поступает на железнодорожное транспортное средство 653 через преобразователь 652. Данные локомотива, собранные датчиком 654 от железнодорожного транспортного средства, затем передаются по сети, проводной и/или беспроводной, 657 обратно на оптимизатор 650. Согласно иллюстративному варианту осуществления, оптимизатор 650 может использовать любую переменную и использовать эту переменную при определении, по меньшей мере, одного из скорости, мощности и/или позиции регулятора. Например, оптимизатор может представлять собой, по меньшей мере, один из оптимизатора для топлива, времени, выбросов и/или их комбинации.
Оптимизатор 650 определяет рабочие характеристики для, по меньшей мере, одного фактора, подлежащего регулировке, в порядке примера, но не ограничения, скорости, расхода топлива, выбросов и т.д. Оптимизатор 650 определяет, по меньшей мере, одну из регулировки мощности и/или крутящего момента на основании определенного оптимизированного значения. Преобразователь 652 предусмотрен для преобразования мощности, крутящего момента, скорости, выбросов, расхода песка, настроек, конфигураций и т.д., и/или управляющих вводов для железнодорожного транспортного средства 653, обычно локомотива. В частности, эта информация или данные о мощности, крутящем моменте, скорости, выбросах, расходе песка, настройках, конфигурациях и т.д., и/или управляющих вводах преобразуется в электрический сигнал.
На Фиг.13 показана система замкнутого цикла, объединенная с главным регулятором. Как раскрыто более подробно ниже, преобразователь 652 может взаимодействовать с любым из совокупности устройств, в порядке примера, но не ограничения, главным регулятором, регулятором машиниста с дистанционным управлением, регулятором распределенной подачи мощности, модемом поездной линии связи, аналоговым вводом и т.д. Преобразователь, например, может отключать выход главного регулятора 651. Главный регулятор 651 обычно используется машинистом для подачи на локомотив команд, в порядке примера, но не ограничения, мощности, тягового усилия, расхода песка, торможения (включающего в себя, по меньшей мере, одно из динамического торможения, пневматического торможения, ручного торможения и т.д.), тяги, и т.д. Специалистам в данной области техники очевидно, что главный регулятор можно использовать для управления аппаратными переключателями и программными переключателями, используемыми при управлении локомотивом. Преобразователь 652 подает сигналы на главный регулятор 651. Отключение главного регулятора 651 можно осуществлять посредством электрических проводов или программных переключателей или программируемого процесса выбора ввода и т.д. Показано переключающее устройство 655 для осуществления этой функции.
Как рассмотрено выше, те же методы можно использовать для других устройств, в порядке примера, но не ограничения, регулятора машиниста, регулятора распределенной подачи мощности, модема поездной линии связи, аналогового ввода и т.д. Хотя это не показано, специалистам в данной области техники очевидно, что главный регулятор аналогично может использовать эти устройства и соответствующие соединения с локомотивом и использовать входные сигналы. Система связи 657 для этих других устройств может быть беспроводной или проводной.
На Фиг.14 показан вариант осуществления системы с замкнутым циклом для эксплуатации железнодорожного транспортного средства, объединенной с другой подсистемой ввода для эксплуатации железнодорожного транспортного средства. Например, регулятор 659 распределенной подачи мощности может принимать вводы из различных источников 661, в порядке примера, но не ограничения, машиниста, поездных линий связи и/или регуляторов машиниста, и передавать информацию на локомотивы в удаленных положениях. Преобразователь 652 может выдавать информацию непосредственно на вход DP регулятора 659 (в качестве дополнительного ввода) или разрывать одно из входных соединений и передавать информацию на DP регулятор 659. Переключатель 655 предусмотрен, чтобы устанавливать, как преобразователь 652 должен выдавать информацию на DP регулятор 659, согласно рассмотренному выше. Переключатель 655 может быть программным переключателем и/или проводным переключателем. Дополнительно, переключатель 655 не обязательно является переключателем на два направления. Переключатель может иметь совокупность направлений переключения на основании количества управляемых сигналов.
Согласно другому иллюстративному варианту осуществления, преобразователь может управлять работой главного регулятора, как показано на Фиг.15. Преобразователь 652 имеет механическое средство для автоматического переключения главного регулятора 651 на основании электрических сигналов, полученных от оптимизатора 650.
Датчики 654 предусмотрены на локомотиве для сбора данных рабочего состояния, в порядке примера, но не ограничения, скорости, выбросов, тягового усилия, мощности и т.д. Выходная информация 654 локомотива поступает на оптимизатор 650, обычно через железнодорожное транспортное средство 653, таким образом, завершая систему замкнутого цикла.
На Фиг.16 изображена логическая блок-схема способа эксплуатации железнодорожного транспортного средства в процессе с замкнутым циклом. Логическая блок-схема 660 включает в себя этап, на котором определяют оптимизированную регулировку для локомотивной сцепки, этап 662. Оптимизированная регулировка может включать в себя регулировку любой установочной переменной, в порядке примера, но не ограничения, по меньшей мере, одного из уровня мощности, оптимизированного крутящего момента, выбросов, количества обмоторенных осей, других конфигураций локомотива и т.д. На другом этапе преобразуют оптимизированный уровень мощности и/или регулировку крутящего момента в распознаваемый входной сигнал для локомотивной сцепки, этап 664. По меньшей мере, одно рабочее состояние локомотивной сцепки определяют, когда применяется, по меньшей мере, одна из регулировок оптимизированного уровня мощности и оптимизированного крутящего момента, этап 667. Еще на одном этапе передают по замкнутому циклу управления на оптимизатор, по меньшей мере, одно рабочее состояние, чтобы, по меньшей мере рабочее состояние использовалось для дополнительной оптимизации по меньшей мере, одной из регулировок уровня мощности и крутящего момента, этап 668.
Как раскрыто выше, этапы, показанные на логической блок-схеме 660, могут осуществляться с использованием компьютерного программного кода. Таким образом, для железнодорожных транспортных средств, которые первоначально могут не иметь способности осуществлять раскрытые здесь этапы, электронные носители, содержащие компьютерные программные модули, могут считываться компьютером на железнодорожном транспортном средстве, благодаря чему, по меньшей мере, некоторые программные модули могут загружаться на железнодорожное транспортное средство для реализации. Электронные носители не подлежат ограничению, поскольку любые компьютерные программные модули также могут загружаться через систему переноса электронных носителей, включающую в себя беспроводную и/или проводную систему переноса, в порядке примера, но не ограничения, использующую интернет для осуществления установки.
Хотя были описаны различные варианты осуществления настоящего изобретения в том, что в настоящее время считается предпочтительным вариантом осуществления, специалисты в данной области техники могут предложить многочисленные вариации и модификации. Соответственно, предполагается, что изобретение не ограничивается конкретным иллюстративным вариантом осуществления, но его следует интерпретировать согласно полным сущности и объему прилагаемой формулы изобретения.
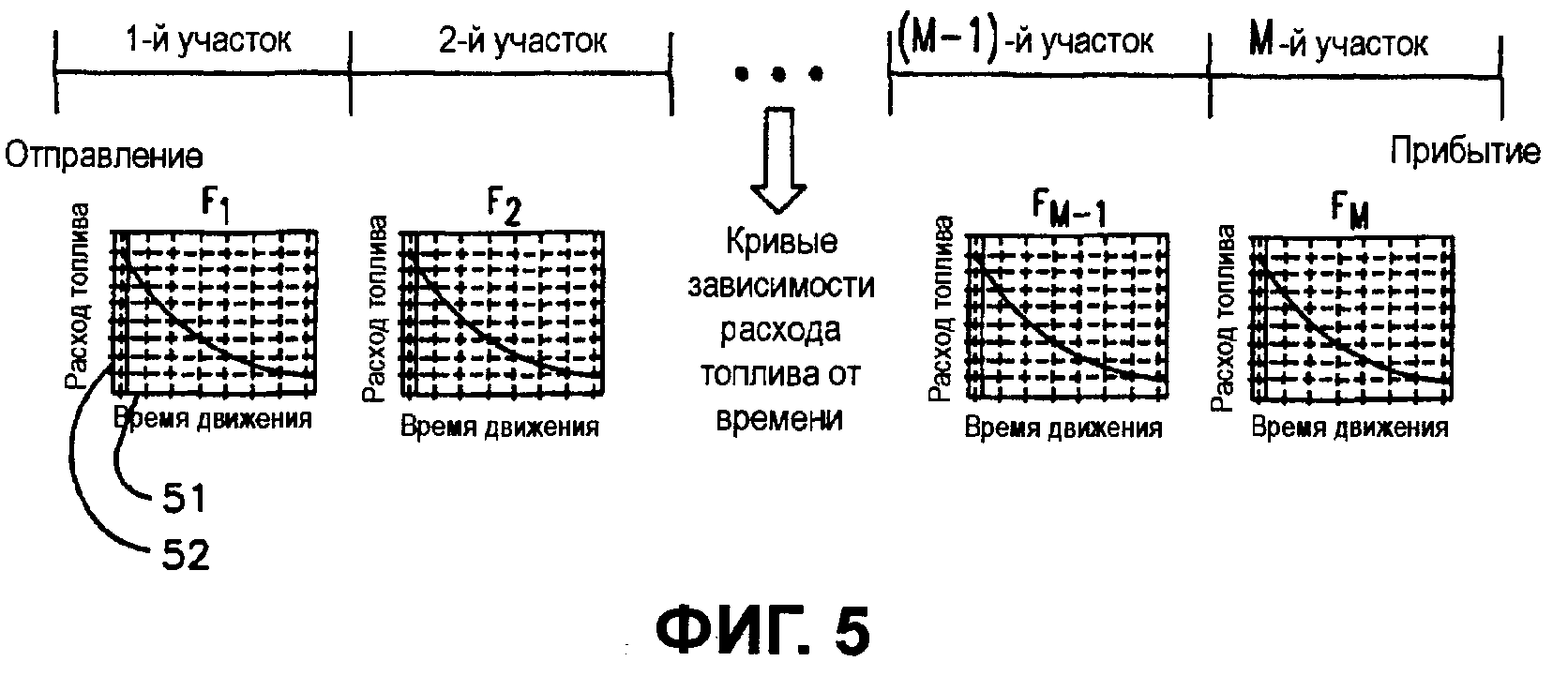
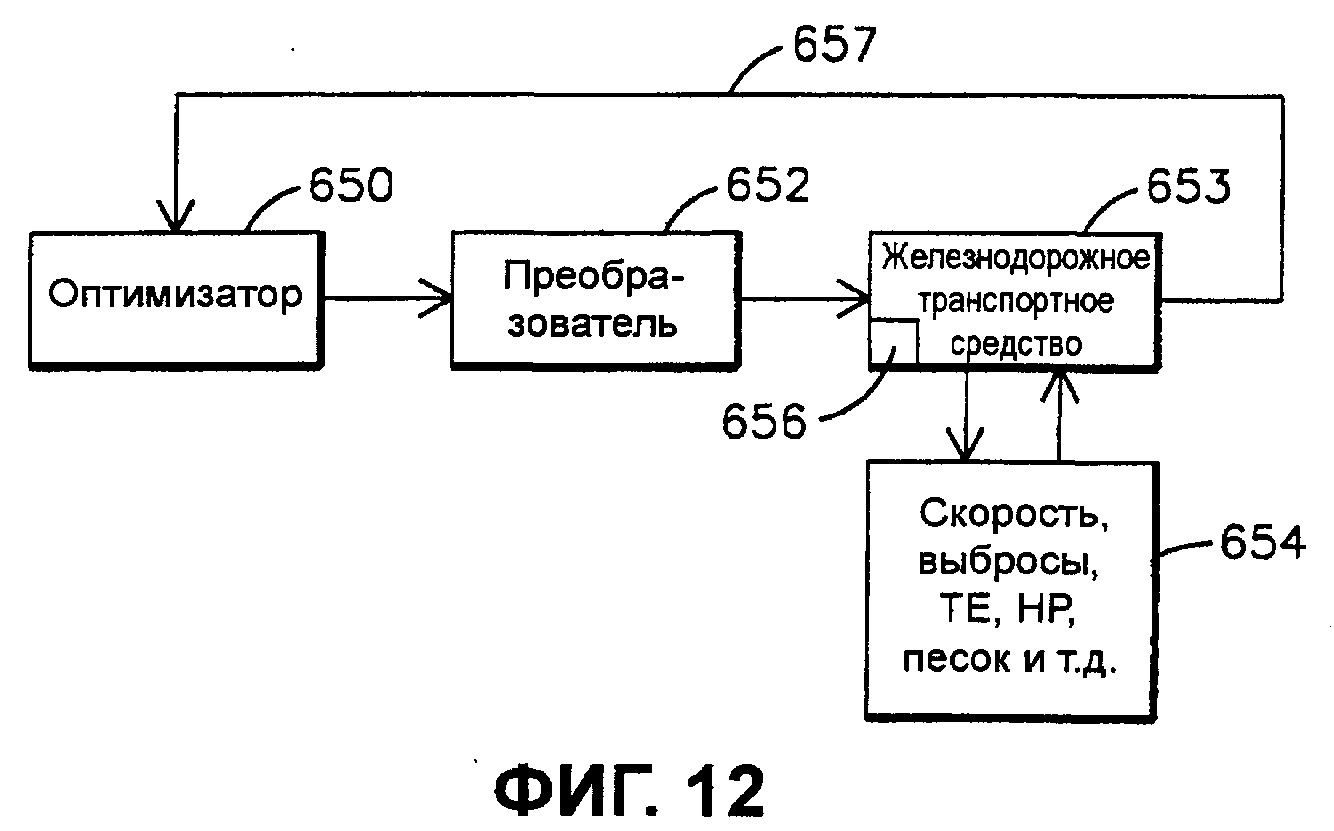
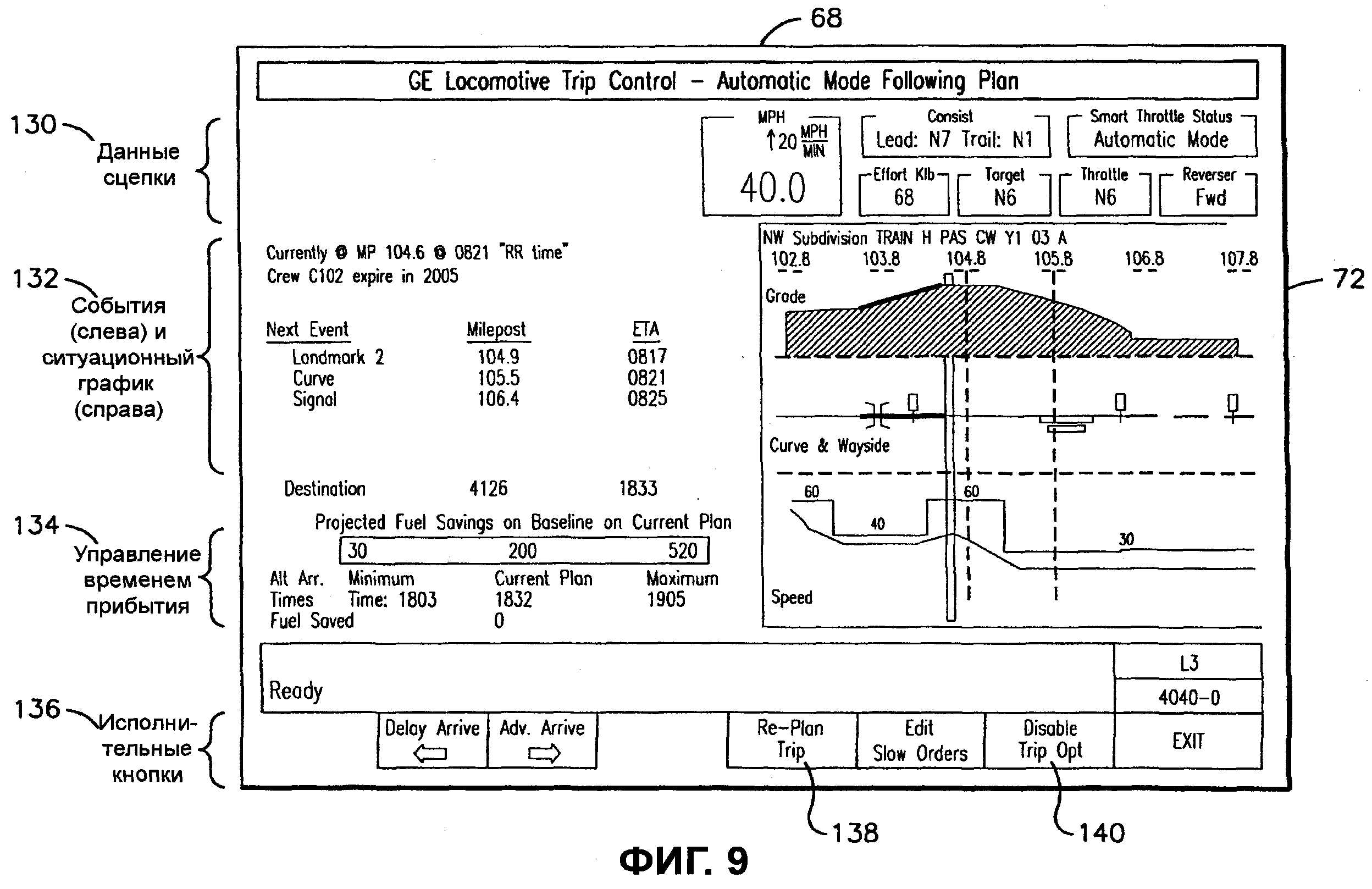
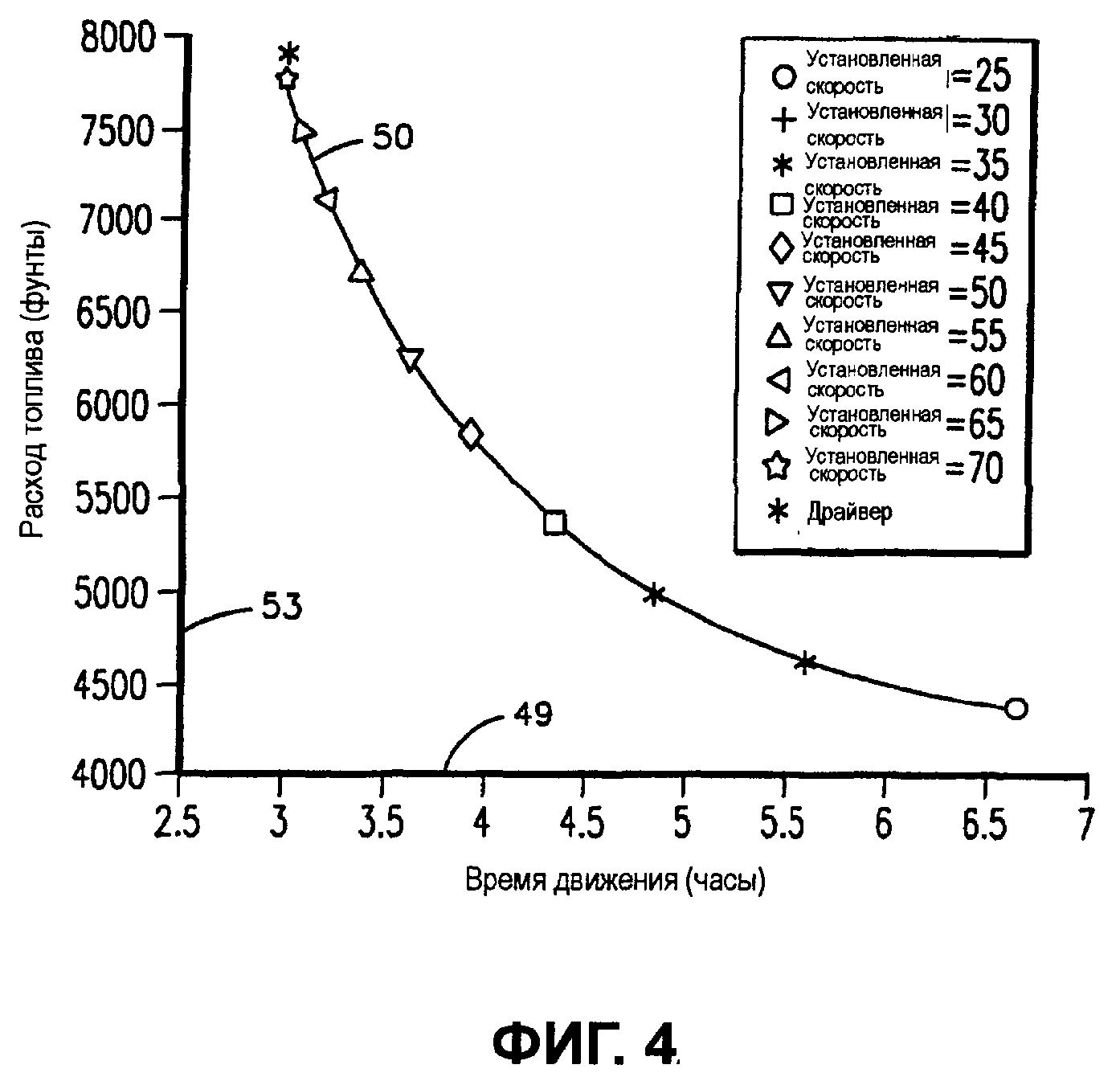
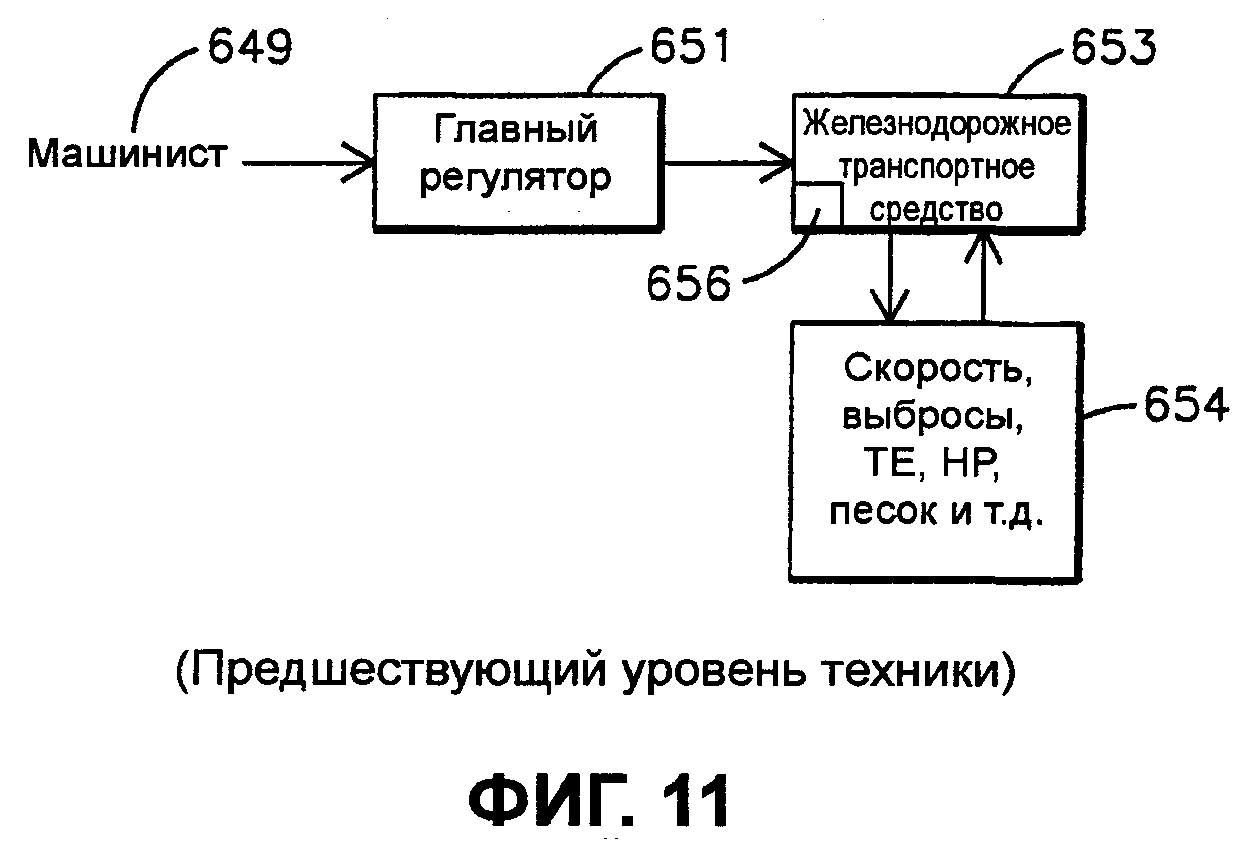
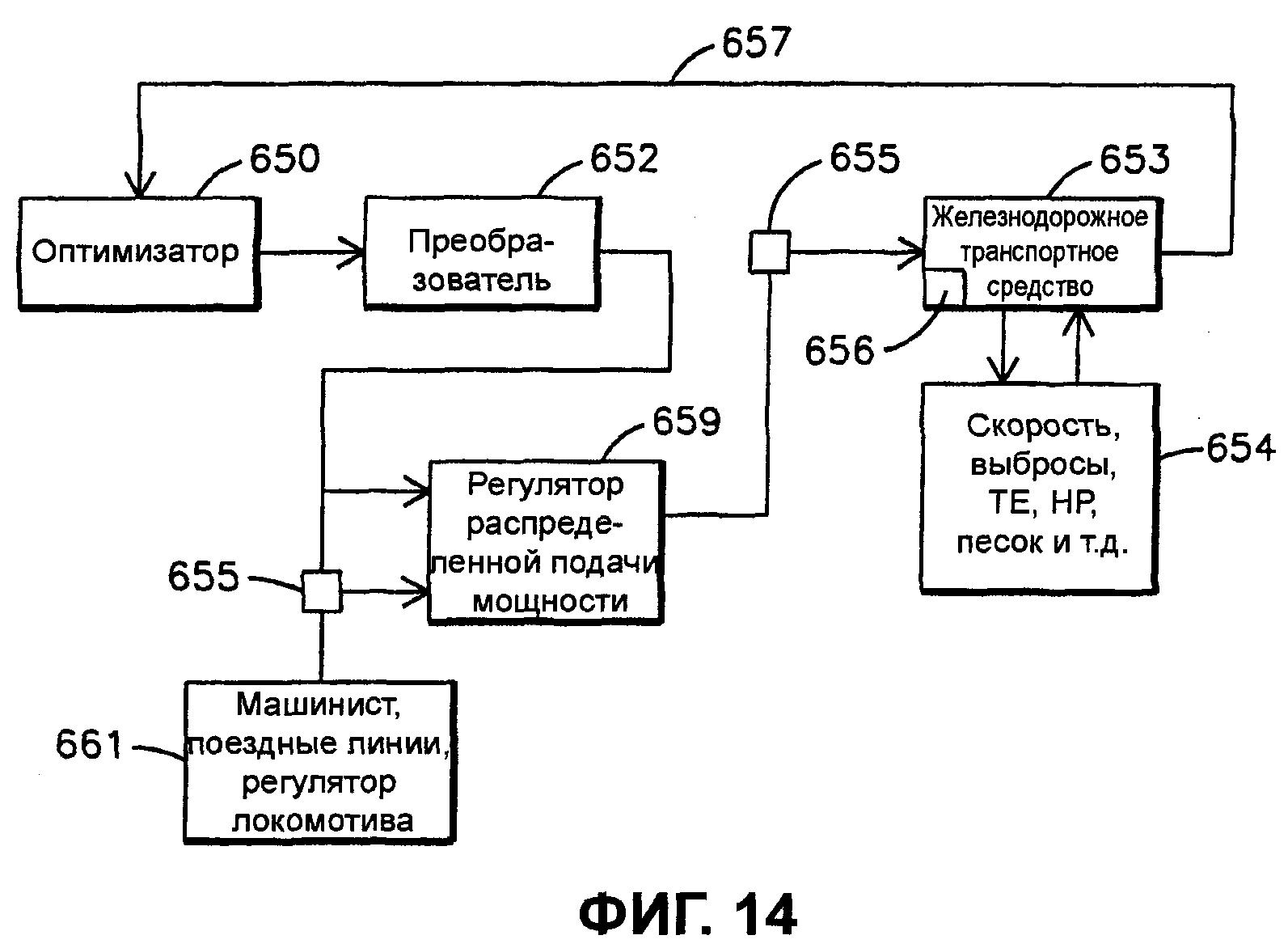
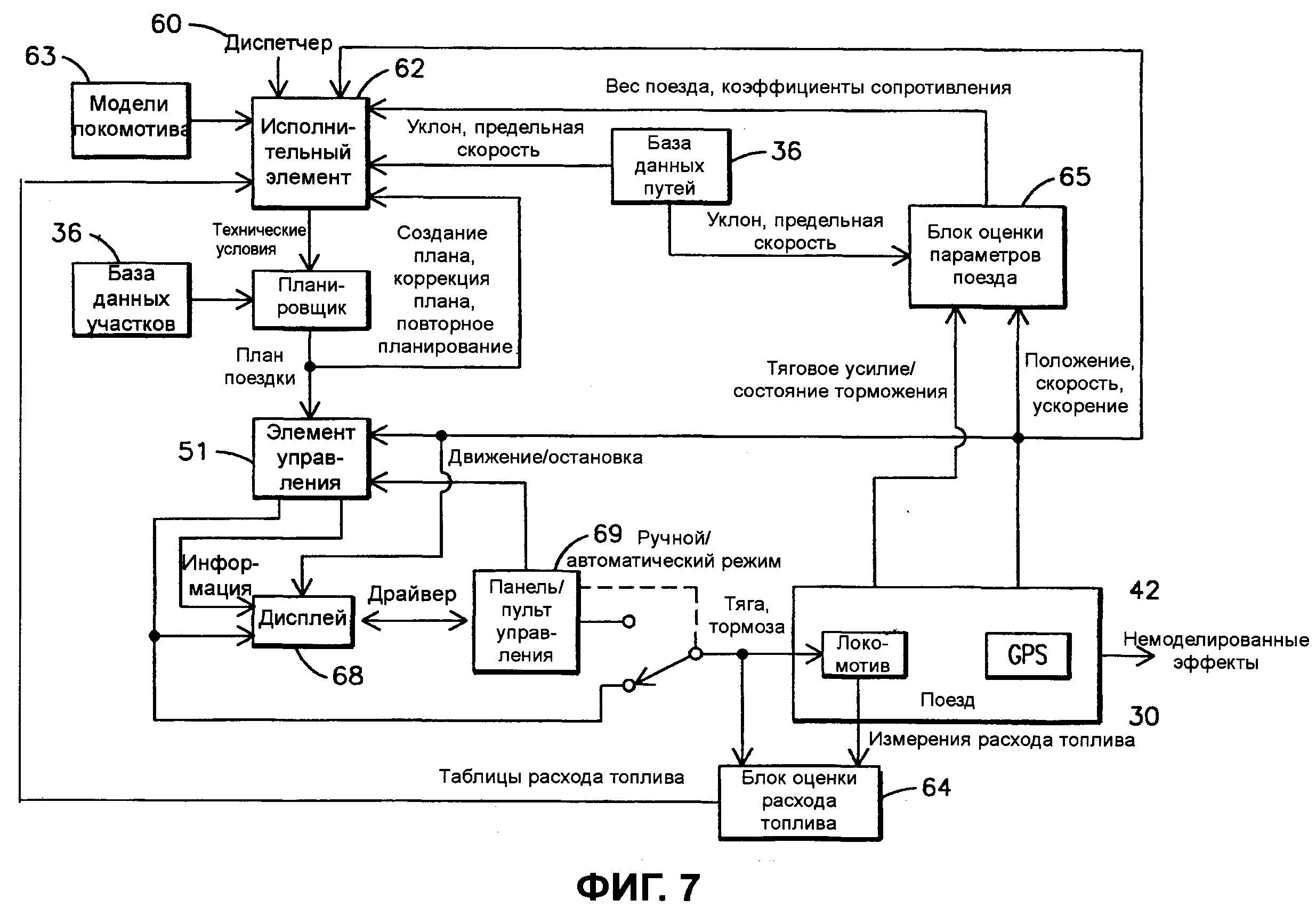
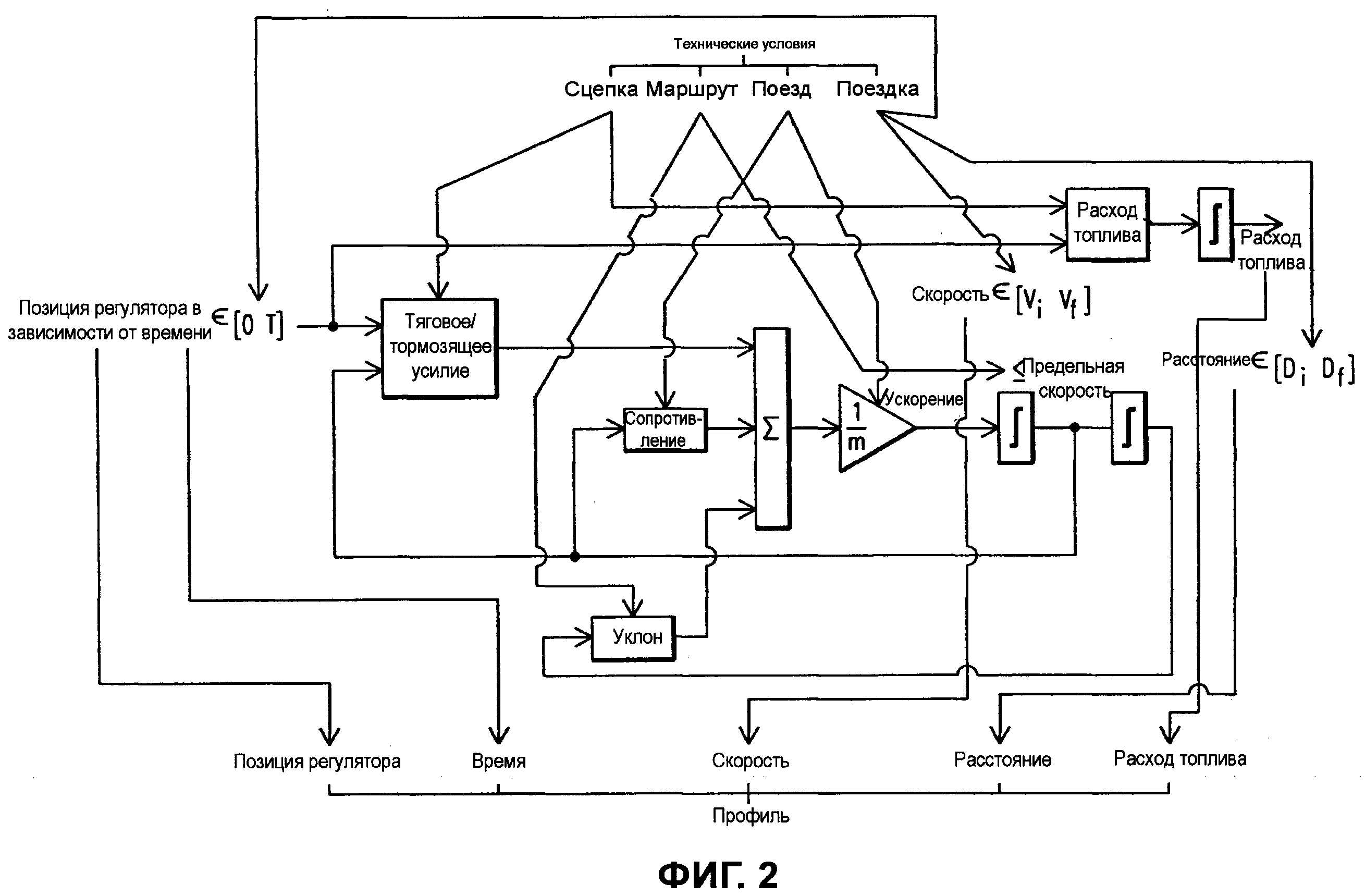
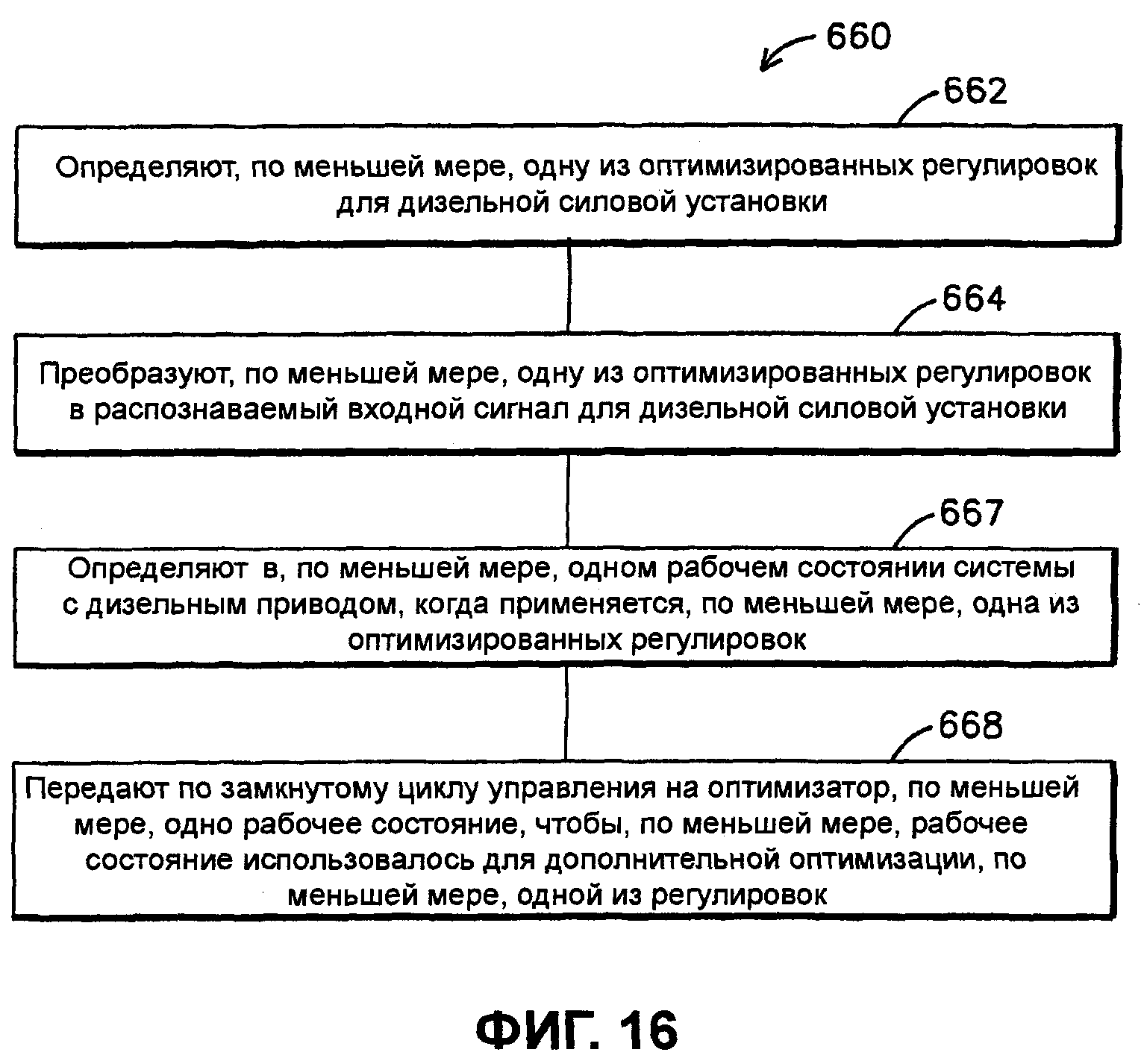
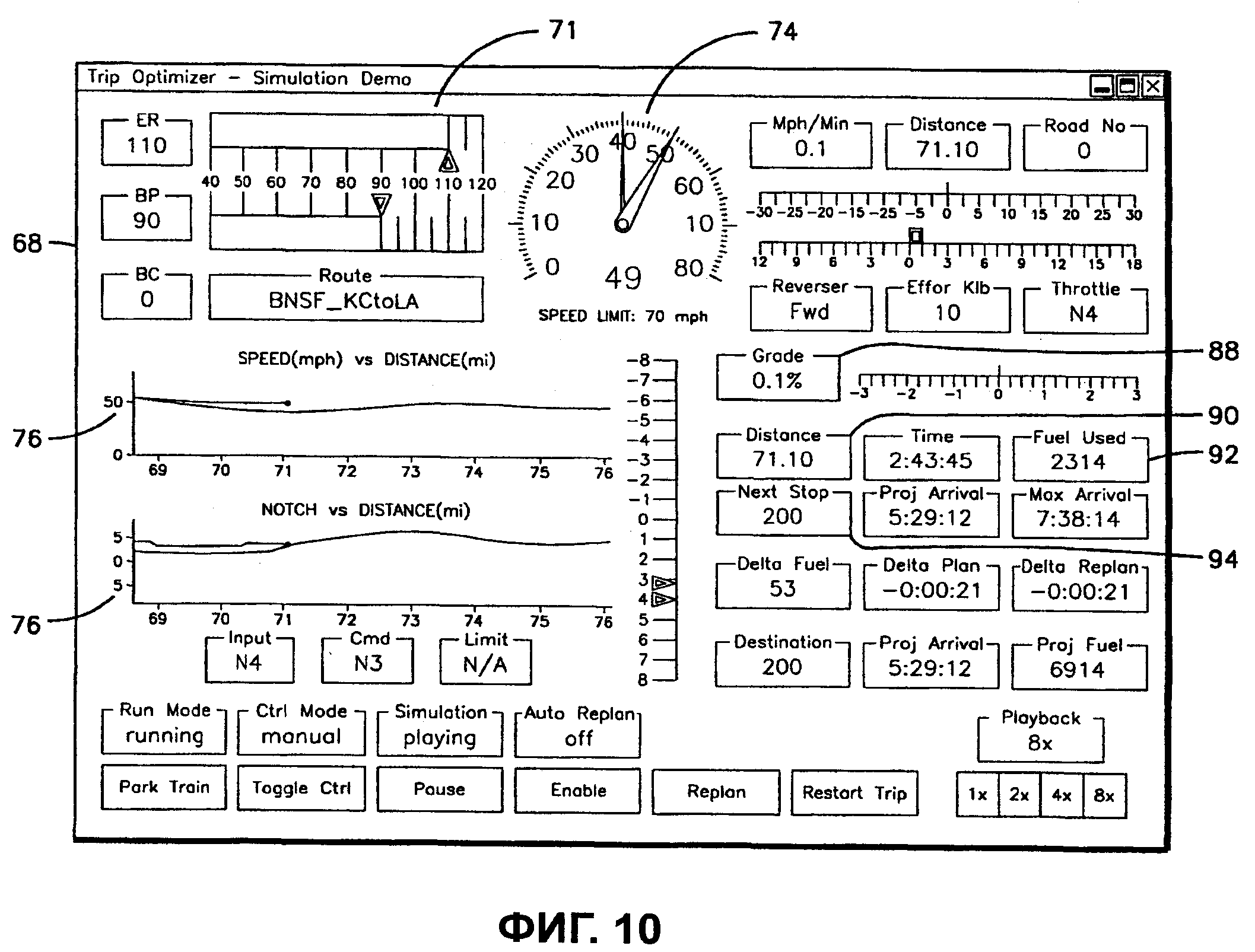
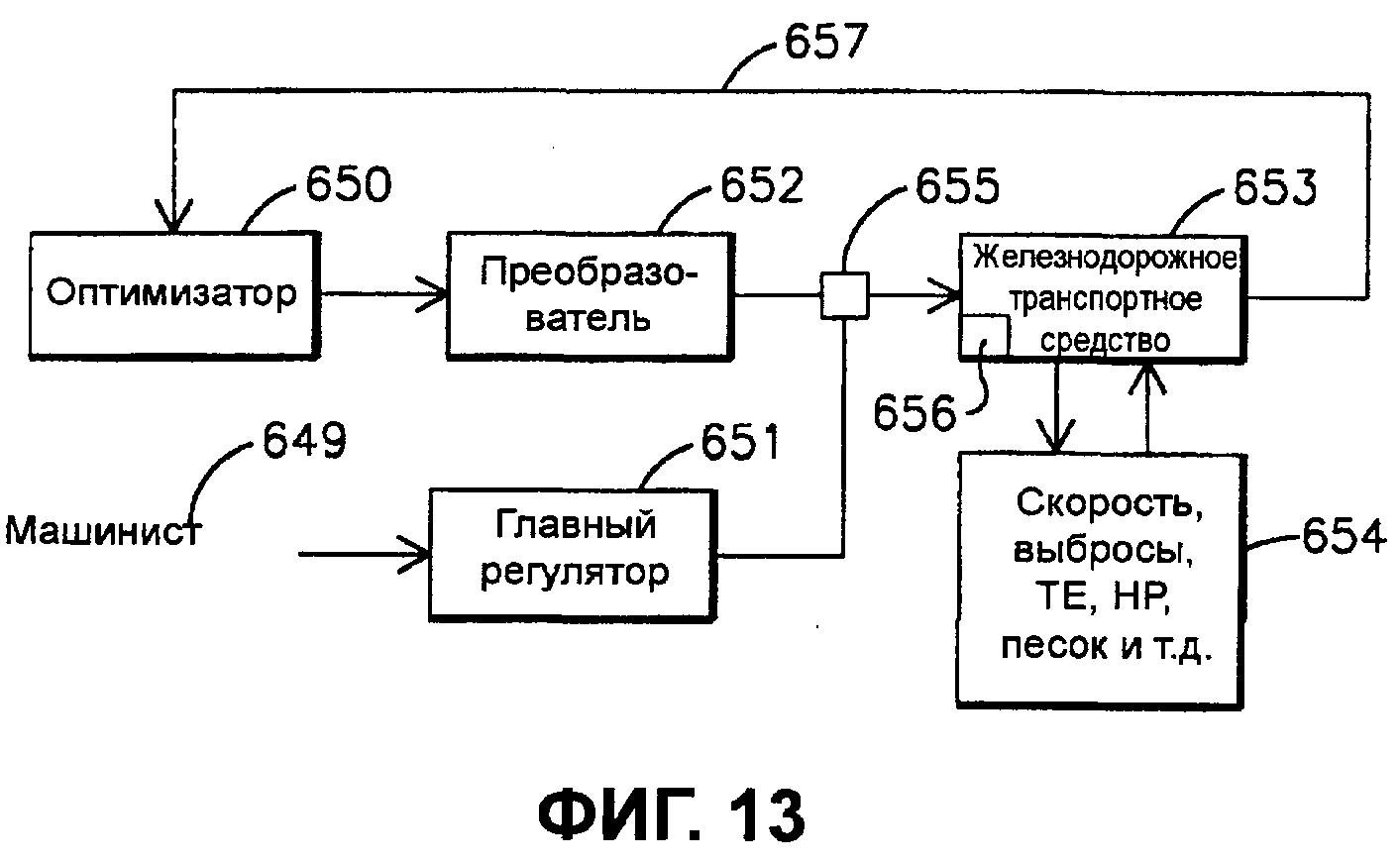
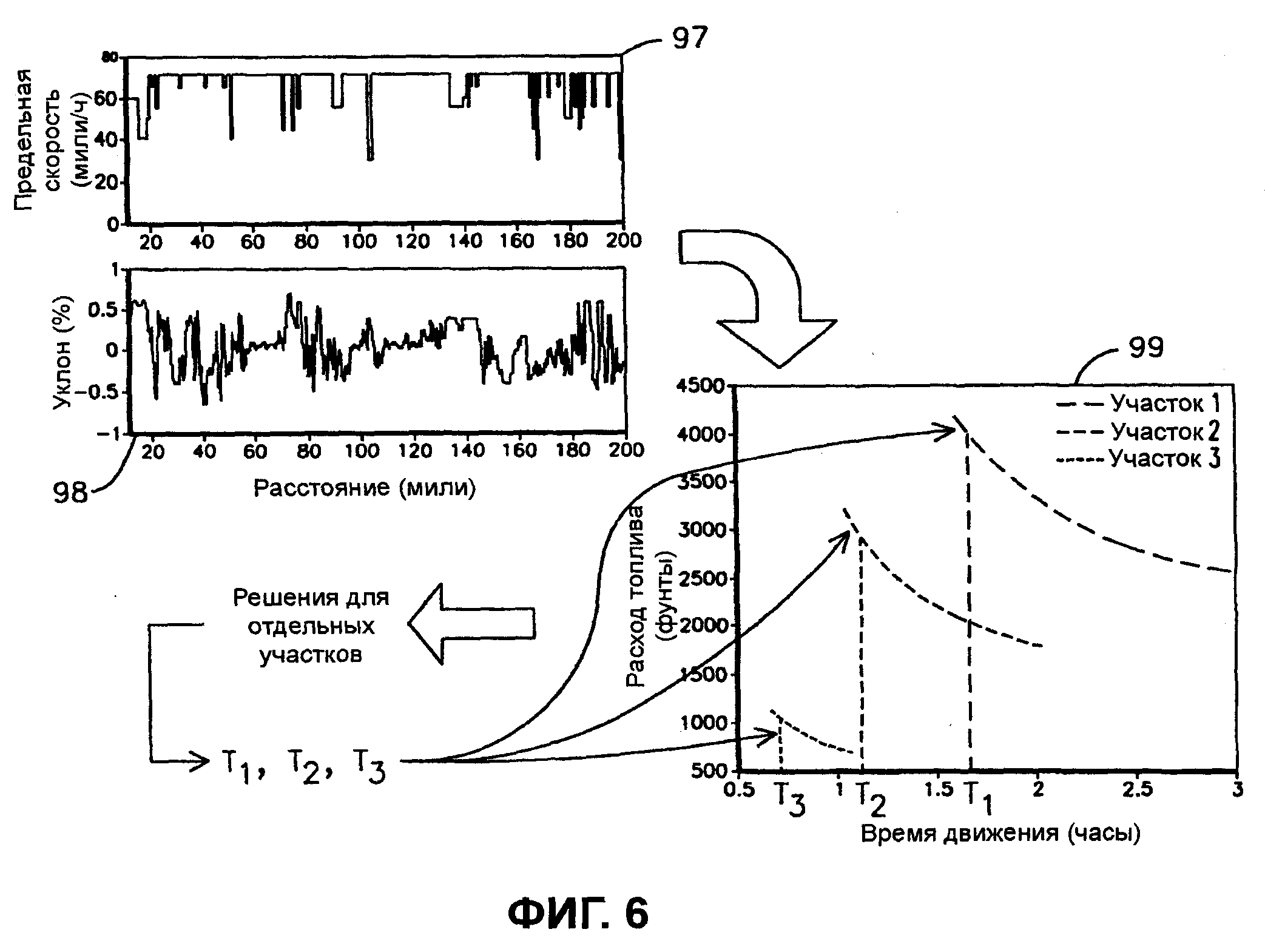
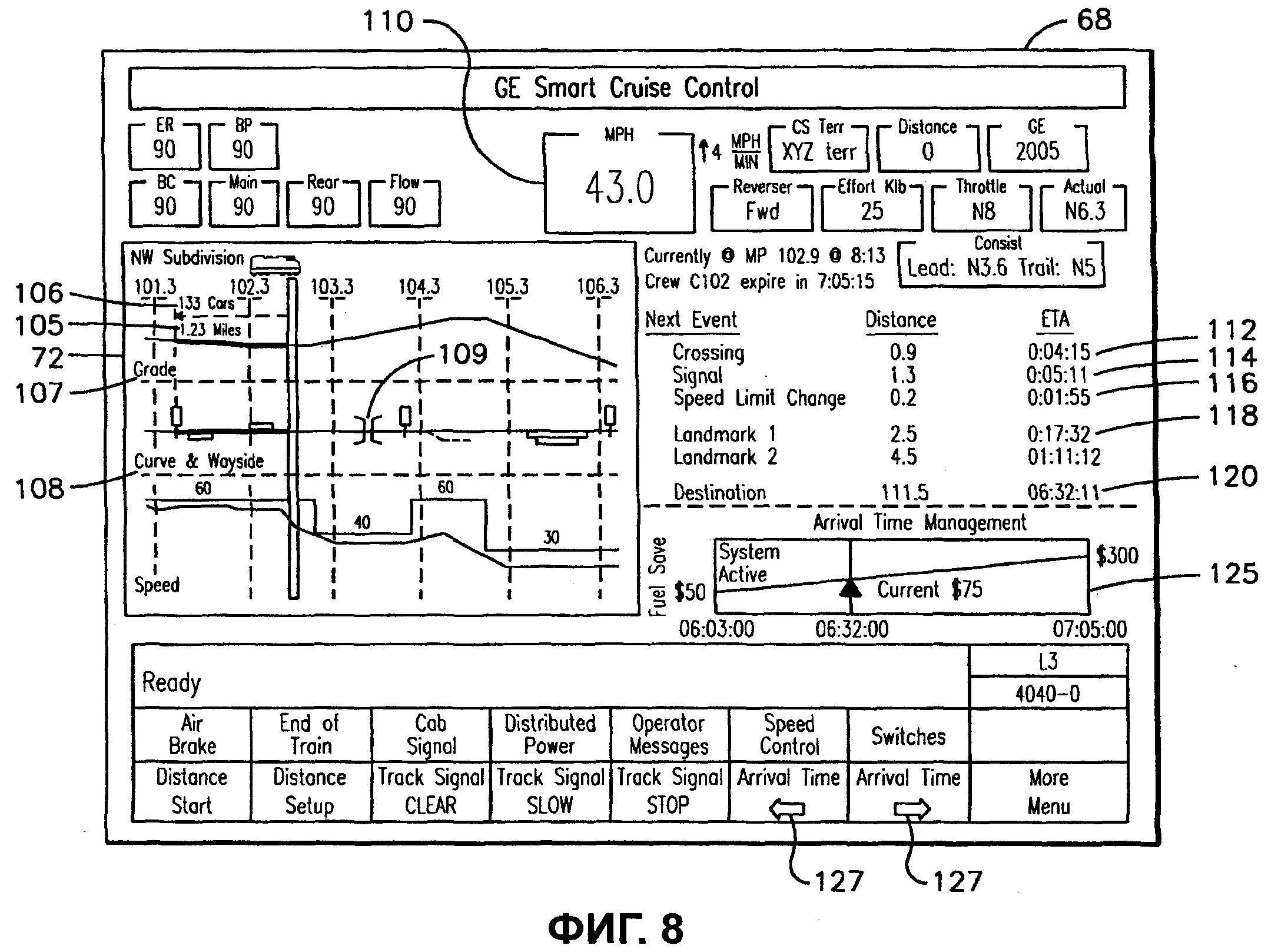
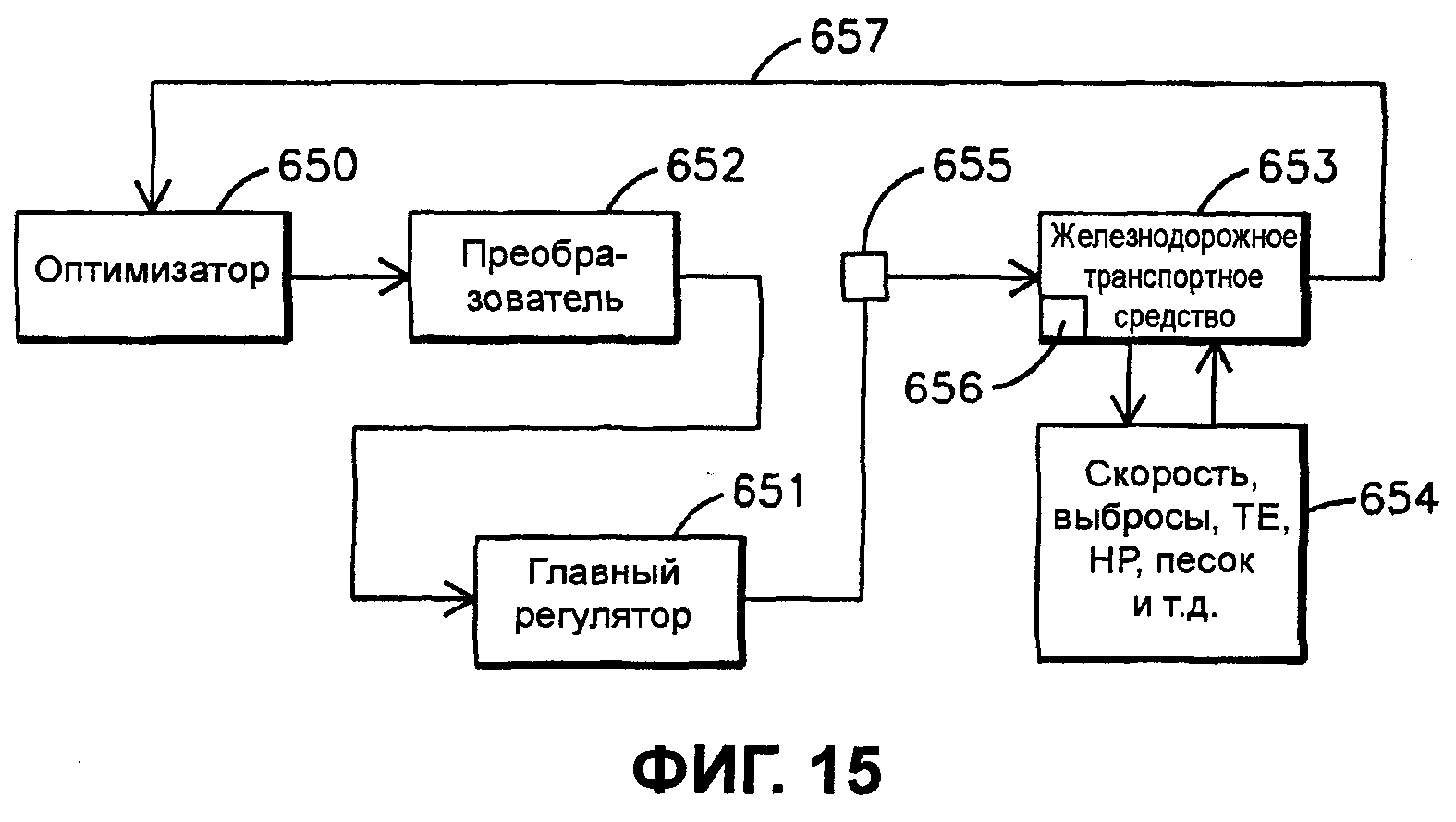
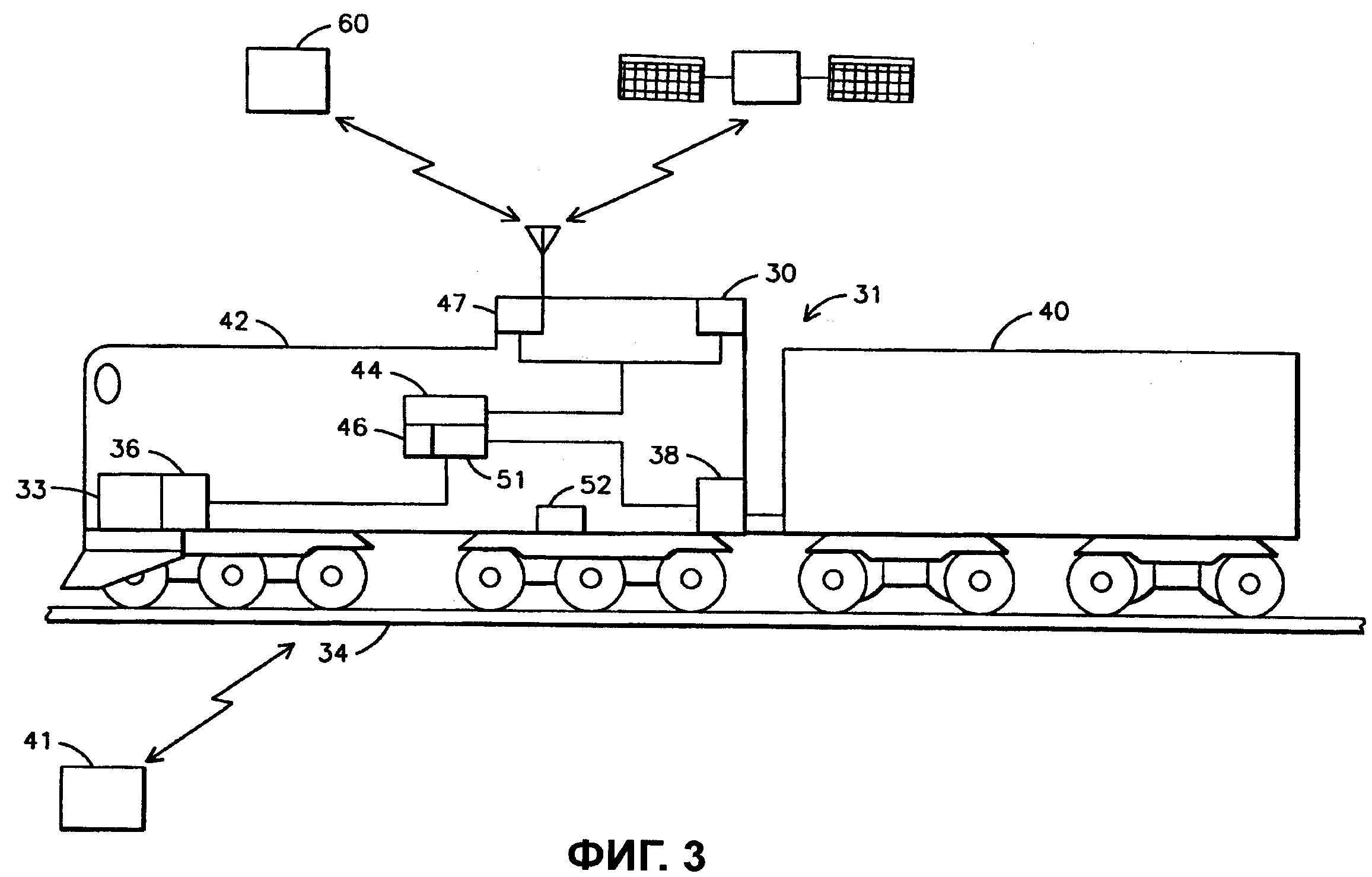
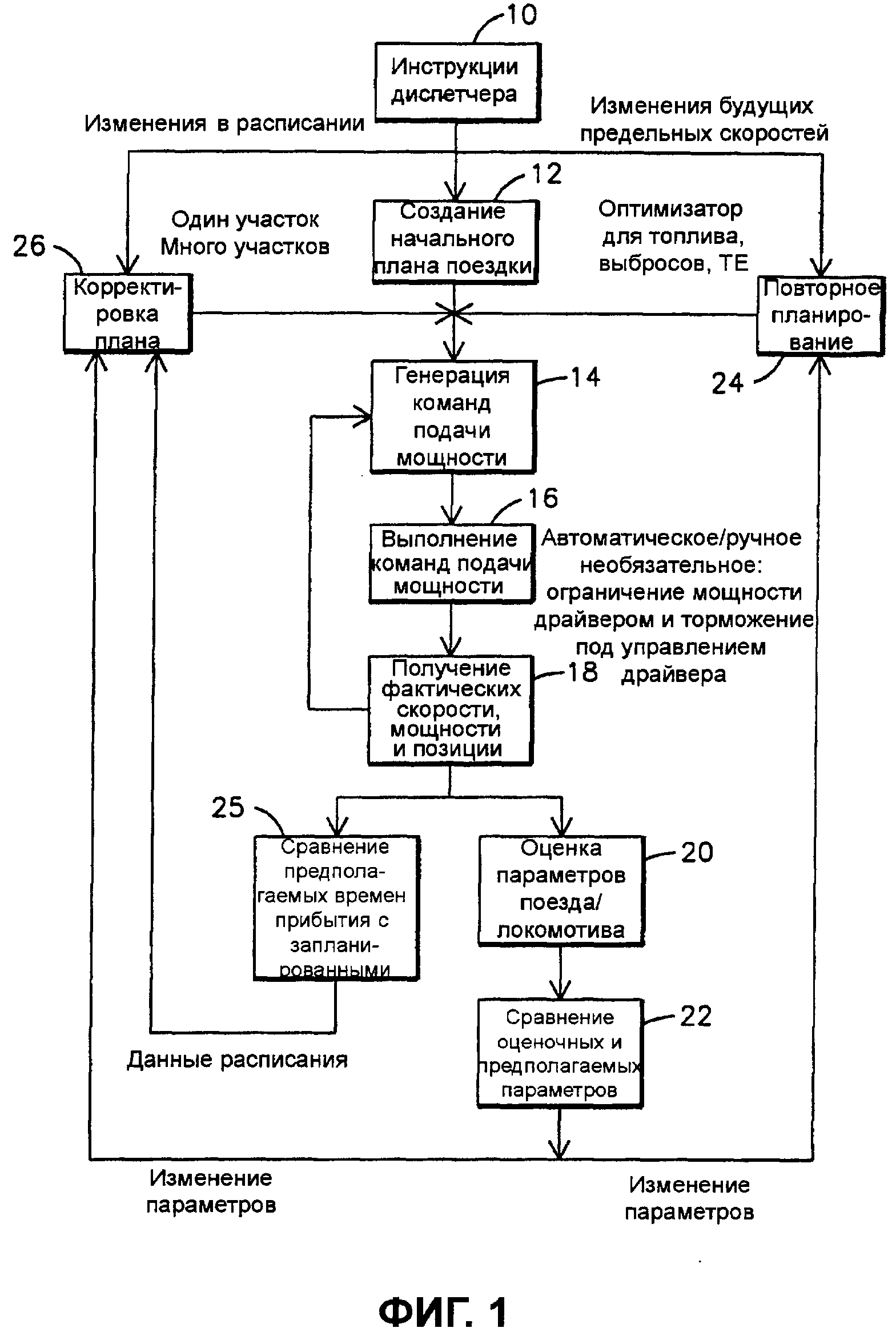
Система снижения образования вихрей на торцевой стенке (варианты) и способ работы системы
Газотурбинный двигатель с вентиляторами противоположного вращения, имеющий шнековый газогенератор с положительным смещением осевого потока
Устройство и способ определения местоположения ресурсов в пределах железнодорожной станции
Зажимное приспособление (варианты) для механической обработки сопловой лопатки
Системы и способы использования алгоритма регулировки динамики горения с помощью камеры сгорания с множеством индивидуальных отсеков
Способ определения концентрации полимера в водных системах
Люминесцентная лампа с малым потреблением мощности
Система и способ оптимизации рейса для транспортного средства
Способ для оптимизации работы поезда для поезда, включающего в себя множественные локомотивы с распределенной подачей мощности
Система и способ изоляции трансформатора
Система снижения образования вихрей на торцевой стенке (варианты) и способ работы системы
Газотурбинный двигатель с вентиляторами противоположного вращения, имеющий шнековый газогенератор с положительным смещением осевого потока
Способы изготовления плит охладителя синтетического газа и плиты охладителя синтетического газа
Устройство и способ определения местоположения ресурсов в пределах железнодорожной станции
Способы и системы обмена данными
Паровая турбина и способ отвода влаги из пути потока в паровой турбине
Зажимное приспособление (варианты) для механической обработки сопловой лопатки
Уплотнение пути прохода пара в паровой турбине, приводимое в действие давлением
Системы и способы использования алгоритма регулировки динамики горения с помощью камеры сгорания с множеством индивидуальных отсеков
Способ определения концентрации полимера в водных системах

