Результат интеллектуальной деятельности: СПОСОБ ТРАНСПОРТИРОВКИ НЕГАБАРИТНЫХ ПОДВОДНЫХ ОБЪЕКТОВ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Изобретение относится к области судостроения и касается вопросов создания средств для осуществления подводных подъемно-транспортных операций с негабаритными подводными объектами, в том числе, подо льдом без всплытия на поверхность.
Выполнение транспортных операций с негабаритными грузами в условиях арктического шельфа РФ, так же как в других регионах, где продолжительность межледового периода составляет малую часть года, представляет собой актуальную задачу в связи с необходимостью круглогодичного производства работ по обустройству и обслуживанию подводных добычных систем, ремонту объектов инфраструктуры и т.д. Предыстория развития подводных промысловых технологий связана, главным образом, с освоением акваторий, где лед, либо отсутствует, либо его присутствие не является существенным фактором при выборе технических решений для морских технических средств. Тем не менее, современные подводные технологии, по крайней мере на первых порах могут быть практически без изменений перенесены в ледовитые акватории. Спектр массогабаритных параметров возможных объектов подводной транспортировки весьма широк, поэтому выбор оптимальных параметров транспортных средств представляет собой сложную задачу. Очевидно, что традиционная архитектура подводных транспортных средств (разрабатываемая примерно с 60-х гг. 20-го века), которая предполагает размещение транспортируемого объекта на бору подводных судов существенно ограничивает возможности оптимизации подводной транспортной системы. Более того, необходимость интеграции приводит к распространению ограничений, связанных с традиционной архитектурой подводных транспортных средств, на «большую» систему, которая включает транспортные средства и технологические средства обеспечения промысловой деятельности на шельфе. Очевидно, что полное покрытие всего спектра массогабаритных параметров возможных объектов подводной транспортировки основными средствами традиционной архитектуры неизбежно приведет к избыточности параметров, как самих средств транспортировки, так и транспортной системы, построенной на их основе. Прежде всего, избыточность выразится в неадекватно большом водоизмещении подводных транспортных средств со всеми вытекающими последствиями в плане эффективности применения, стоимости жизненного цикла и т.д. В то же время, известно, что соотношение массы и габаритов подводных объектов транспортировки таково, что их удельная масса (масса отнесенная к объему занимаемого пространства) в подавляющем большинстве случаев весьма существенно меньше плотности собственно конструкционных материалов из которых они изготовлены. Низкая удельная масса крупногабаритных конструкций обеспечивает возможность их транспортировки на плаву и широко используется во многих технологиях, например, при строительстве, причальных и защитных сооружений, морских гравитационных платформ и т.д. Известны технические решения, направленные на сообщение объектам транспортировки дополнительной плавучести, в случае нехватки собственной и т.д. Актуализация собственной плавучести в области подводных транспортных операций имеет место в технологии судоподъема. Известно большое количество прецедентов и запатентованных технических решений, основанных на восстановлении собственной плавучести, например, пат. №2249533, №22270134, №2005129355 A и т.п. При этом важнейшим преимуществом транспортных технологий основанных на использовании собственной плавучести объекта транспортировки, например, в области судоподъема является возможность осуществлять подъем крупных объектов, используя сравнительно маломощные подъемные и транспортные средства. Основные вопросы реализации таких технологий связаны с обеспечением герметичности внутренних объемов объекта операции, а в более широком смысле с проблемой удержания плавучего вещества или плавучих тел внутри подводного (затонувшего) объекта. Известны различные способы решения этой задачи, среди которых примерно с середины 60-х гг. прошлого века занимает способ заполнения внутреннего пространства подводного объекта множеством плавучих тел, который снимает проблему герметизации как таковую. Впервые на практике способ был применен компанией «Вейсмюллер» в 60-е гг. прошлого века. В настоящее время способ применяется в судоподъемных операциях, для поддержания на плаву утилизируемых АЛЛ и т.д. Однако распространение способа связано с трудностями. В частности, при выгрузке плавучего материала из объектов (пат. РФ №2230001). Также не имеют широкого распространения технические средства доставки множества плавучих тел внутрь объекта, находящегося на глубине и т.д.
В различных областях техники и технологии в настоящее время существуют известные технические решения, совокупность которых создает предпосылки для развития технических средств транспортировки подводных объектов дополняющих, а в случае необходимости заменяющих подводные средства традиционной архитектуры. С учетом, специфики проблем транспортного обеспечения подводных промысловых технологий, в частности, на арктическом шельфе, адаптация и распространение известных технических решений на область подводных транспортных технологий может обеспечить существенные преимущества.
В настоящее время можно констатировать следующее:
1. Подавляющее большинство известных технических решений в области транспортировки подводных объектов предполагает применение надводных технических средств, что вполне объяснимо отсутствием экономически обоснованной потребности в решении задачи подводной транспортировки. Известные проектные проработки, выполненные в этом направлении, до настоящего времени не реализованы нигде в мире. Вопрос о необходимости подводной транспортировки грузов оказался в практической плоскости лишь в связи с необходимостью освоения углеводородных ресурсов арктического шельфа.
2. Подавляющее большинство технических решений в области подводной транспортировки грузов направлено не на изменение собственных функциональных свойств груза, а на компенсацию веса объекта как действующего фактора за счет свойств транспортных средств, что приводит росту массогабаритных параметров их грузонесущих и грузозахватных конструкций, а также водоизмещения транспортных средств в целом.
3. Альтернативное техническое решение состоит в снижение подводного веса объекта операции. В области судоподъема подобное техническое решение широко известно.
4. Главными проблемами, при компенсации подводного веса объекта транспортировки являются:
- ограниченность прочности плавучих тел, используемых для сообщения необходимой плавучести подводного объекта;
- сложность доставки плавучих тел на глубину расположения объекта и обеспечение необходимого, с точки зрения условий равновесия, распределения плавучих тел в пространстве;
- обеспечение совместного действия сил плавучести множества плавучих тел;
- обеспечение сохранности плавучих тел в целях повторного их использования и предотвращения засорения акватории и т.д.
В отсутствие прямых аналогов наиболее близкие частные технические решения, относящиеся к области транспортировки негабаритных подводных объектов, относятся к области судоподъема.
Известно техническое решение «Комплекс для подъема затонувших объектов» (пат. РФ №2081026 опубликовано 10.06.1997) - принято за прототип. Комплекс включает две подводные лодки и функционирует следующим образом. После обнаружения затонувшего объекта, например подводной лодки, комплекс опускается на дно рядом с объектом. С помощью двух подводных лодок, входящих в комплекс, под объект заводят подъемную платформу, расположенную между ними. Точнее платформу, растянутую между подводными лодками комплекса, так как платформа представляет собой гибкую конструкцию из параллельных тросов, на каждый из которых насажены плавучие сферические элементы. После опускания объекта на платформу осуществляют сброс балластных грузов с подводных лодок и тем самым обеспечивают подъем затонувшего объекта на поверхность.
Основными недостатками прототипа является следующие:
1. Комплекс практически невозможно использовать для перемещения объектов в толще воды, так величина постоянной подъемной силы плавучих тел заведомо должна превышать подводный вес объекта. Поэтому будет иметь место постоянное вертикальное движение комплекса с объектом к поверхности акватории.
2. Для нормального функционирования комплекса необходимо равенство веса подводного объекта, плавучести подъемной платформы и подводного веса сбрасываемых грузов. Чтобы использовать различные сбрасываемые балластные грузы, подводные лодки комплекса должны иметь достаточно большие прочные компенсационные цистерны для обеспечения нулевой собственной плавучести в широком диапазоне весов сбрасываемых грузов (равных по величине весам различных объектов транспортировки). Наличие упомянутых компенсационных цистерн в прототипе не предусмотрено.
3. Изменение плавучести подъемной платформы возможно лишь за счет изменения количества и плавучих тел на тросах платформы, что возможно лишь путем ее перемонтажа перед каждой операцией. Это существенно снижает эффективность комплекса, так как требует производства достаточно сложного технологического процесса, привлечения плавсредств и т.д.
4. Конструкция платформы не предусматривает фиксацию плавучих тел по длине тросов, что делает невозможным создание необходимого по условиям статики распределения суммарной подъемной силы.
5. Комплекс даже теоретически невозможно использовать на стадии установки на грунт подводного объекта, доставленного к месту назначения, так как после расцепления платформы с объектом она неуправляемо всплывет вместе с подводными лодками, к которым она прикреплена и т.д.
Задачей предлагаемого изобретения является обеспечение независимости процесса транспортировки подводных объектов от наличия и состояния ледового покрова акватории, минимизация водоизмещения подводных транспортных средств, универсализация комплекса в отношении массы и габаритов транспортируемых негабаритных подводных объектов, упрощение и удешевление эксплуатации комплекса, упрощение и удешевление модернизации комплекса, улучшение экологических параметров комплекса.
Достижение указанного технического результата обеспечивается за счет следующих отличительных признаков комплекса для транспортировки негабаритных подводных объектов.
В способе транспортировки, при котором подводному объекту сообщают положительную плавучесть за счет суммарной подъемной силы множества погружаемых плавучих тел, а транспортировку осуществляют за счет совместного действия не менее двух самоходных подводных средств, в качестве указанных плавучих тел используют не связанные между собой плавучие тела. Для обеспечения совместного действия плавучие тела помещают внутрь сетчатой оболочки. Оболочку предварительно прочно связывают с объектом транспортировки. По завершении транспортировки объекта сетчатую оболочку освобождают от плавучих тел и от связей с подводным объектом.
В комплексе для реализации способа, включающем по меньшей мере два самоходных подводных средства, оснащенных уравнительными и дифферентными системами, и множество погружаемых плавучих тел, по изобретению введены надводное судно и сетчатая оболочка.
Сетчатая оболочка имеет верхний и нижний края, соединенные внешними гибкими натяжными связями регулируемой длины. Нижний край сетчатой оболочки оснащен захватными устройствами с крюками для приложения создаваемой множеством плавучих тел подъемной силы. В верхний край сетчатой оболочки вставлен цилиндрический комингс. К наружной поверхности комингса прикреплен верхний край сетчатой оболочки. Внутри комингса расположена дистанционно управляемая подвижная заслонка для регулирования выхода из под сетчатой оболочки плавучих тел. Снаружи к комингсу прикреплен механизм фиксации и регулирования длины упомянутых гибких натяжных связей. На комингсе также закреплен кабель с подводной вилкой.
Самоходные подводные средства оснащены управляемыми подводными электрическими разъемами для подключения к ним через упомянутый кабель с подводной вилкой приводов заслонки и механизма фиксации и регулирования длины гибких натяжных связей. В корпусе самоходных подводных средств на податливых фундаментах установлены управляемые захватные устройства. Кроме того, уравнительные и дифферентные системы самоходных подводных средств оснащены дополнительными цистернами.
Надводное судно имеет осушаемый трюм, в котором размещена вертикальная шахта, нижний срез которой расположен под днищем судна. На нижнем краю шахты размещено стыковочное устройство с конусной ловушкой и фланцем для плотного контакта с торцом комингса сетчатой оболочки. Верхний срез шахты расположен ниже уровня акватории. Над вертикальной шахтой размещен тросовый спускоподъемный механизм с автоматическим захватным устройством в виде разжимной цанги для втягивания комингса сетчатой оболочки в конусную ловушку стыковочного устройства.
При транспортировке сравнительно малогабаритных, но массивных подводных объектов (которые не имеют открытых сверху свободных полостей) в состав комплекса включена плоская рама с рымами для крюков сетчатой оболочки и дистанционно управляемыми захватными устройствами. Захватные устройства размещаются на штоках регулируемой длины, которые закреплены на раме с помощью шарниров. Промежутки между штоками затянуты сетчатыми пластинами, закрепленными одним краем на раме. Плоская рама имеет прочные конструктивные элементы, совместимые с захватными устройствами, которыми оснащены самоходные подводные средства. Раме имеет кабель с подводной вилкой для подключения к разъемам, которыми оснащены самоходные подводные средства.
На случай, когда глубина доставки транспортируемого объекта превышает высоту, на которую может быть поднят комингс сетчатой оболочки, комплекс дополнительно включает трубопровод, один конец которого выполнен в виде жесткого цилиндра с фланцем для упора на фланец вертикальной шахты, находящейся в трюме надводного суда (входящего в состав комплекса). На втором конце трубопровода установлено управляемое с борта надводного судна стыковочное устройство с конусной ловушкой и опорным фланцем для плотного контакта трубопровода с торцом комингса сетчатой оболочки.
Преимущества предлагаемого комплекса для транспортировки негабаритных подводных объектов в основном состоят в следующем:
- За счет использования самоходных подводных средств комплекс обеспечивает независимость процесса транспортировки подводных объектов от наличия и состояния ледового покрова акватории. Стадия освобождения сетчатой оболочки от несвязанных между собой плавучих тел и связей с транспортируемым грузом занимает незначительное время, что позволяет сократить время пребывания надводного судна над точкой доставки подводного объекта и минимизировать влияние движения ледового покрова на ход реализации технологию транспортировки, с применением предлагаемого способа и комплекса для его реализации;
- За счет компенсации подводного веса транспортируемого объекта с помощью множества несвязанных плавучих тел появляется возможность при каждой операции транспортировки использовать их минимально достаточный объем, то есть минимизировать подводное водоизмещение основных средств комплекса;
- Применение плавучих тел постоянного водоизмещения обеспечивает независимость силы плавучести, компенсирующей вес транспортируемого объекта от глубины, как по маршруту транспортной операции, так в конечной точке маршрута, что позволяет снизить минимизировать параметры уравнительных систем самоходных средств;
- За счет использования множества несвязанных плавучих тел и сетчатой оболочки регулируемого (с помощью натяжных упругих связей) размера, комплекс обладает свойством адаптивности к массогабаритным параметрам транспортируемых подводных объектов;
- За счет применения долговечных и дешевых материалов для изготовления плавучих тел, упрощения условий их хранения, сокращения необходимых инфраструктурных ресурсов, количества и размеров причальных мест и т.д. возможно упрощение и удешевление эксплуатации комплекса;
- Простота наиболее подвижных в функциональном отношении элементов комплекса, плавучих тел, сетчатых оболочек, захватных устройств, оборудования самоходных подводных средств и т.д. предложенное техническое решение позволяет упростить и удешевить модернизацию комплекса;
- Применение плавучих тел и обычных металлических и полимерных материалов, а также сетчатой оболочки и дополнительного трубопровода обеспечивает улучшенные экологические параметры комплекса, так как при нормальной работе не происходит рассеивание плавучих элементов по акватории, а в случае утраты ими необходимых свойств они могут быть переработаны по стандартным технологиям;
- Реализация способа не требует проведения водолазных работ, что повышает безопасность технологии на основе предложенного способа и комплекса для его реализации;
- Минимизировать энергетические и материальные затраты на транспортировку негабаритных подводных объектов за счет многократного повторного использования всех элементов комплекса, включая плавучие элементы и т.д.
Сущность изобретения поясняется на Фиг.1-6, где представлены элементы комплекса, а также на Фиг.7 и 8 где показаны основные стадии реализации способа транспортировки негабаритных подводных объектов.
Комплекс (Фиг.1) транспортировки негабаритных подводных объектов - 1, включающий по меньшей мере два самоходных подводных средства - 2, имеющие уравнительные и дифферентные системы (на рисунке не показаны), и множество погружаемых плавучих тел - 3. Комплекс также включает надводное судно - 4 (см. также Фиг.3) и сетчатую оболочку - 5. Верхний и нижний края сетчатой оболочки - 5, соединены внешними гибкими натяжными связями регулируемой длины - 6. Нижний край сетчатой оболочки оснащен захватными устройствами - 7 с крюками - 8 для приложения создаваемой множеством плавучих тел - 3 подъемной силы к подводному объекту транспортировки - 1. В верхний край сетчатой оболочки - 5 вставлен цилиндрический комингс - 9, к наружной поверхности которого прикреплен верхний край оболочки - 5. Внутри цилиндрического комингса - 9 расположена дистанционно управляемая подвижная заслонка - 10 для регулирования выхода из под сетчатой оболочки - 5 плавучих тел - 3. Снаружи к комингсу - 9 прикреплен механизм фиксации и регулирования длины - 11 упомянутых гибких натяжных связей - 6.
На комингсе - 9 также закреплен кабель - 12 (Фиг.2) с подводной вилкой - 13, а самоходные подводные средства - 2 оснащены управляемыми подводными электрическими разъемами - 14 для подключения к ним через кабель - 12 и вилку - 13 привода (не показан) заслонки - 10 и привода (не показан) механизма фиксации и регулирования длины - 11 гибких натяжных связей - 6. В корпусе самоходных подводных средств - 2 на податливых фундаментах (на рисунке не показаны) установлены управляемые захватные устройства - 15.
Уравнительные и дифферентные системы самоходных подводных средств оснащены дополнительными цистернами (не показаны).
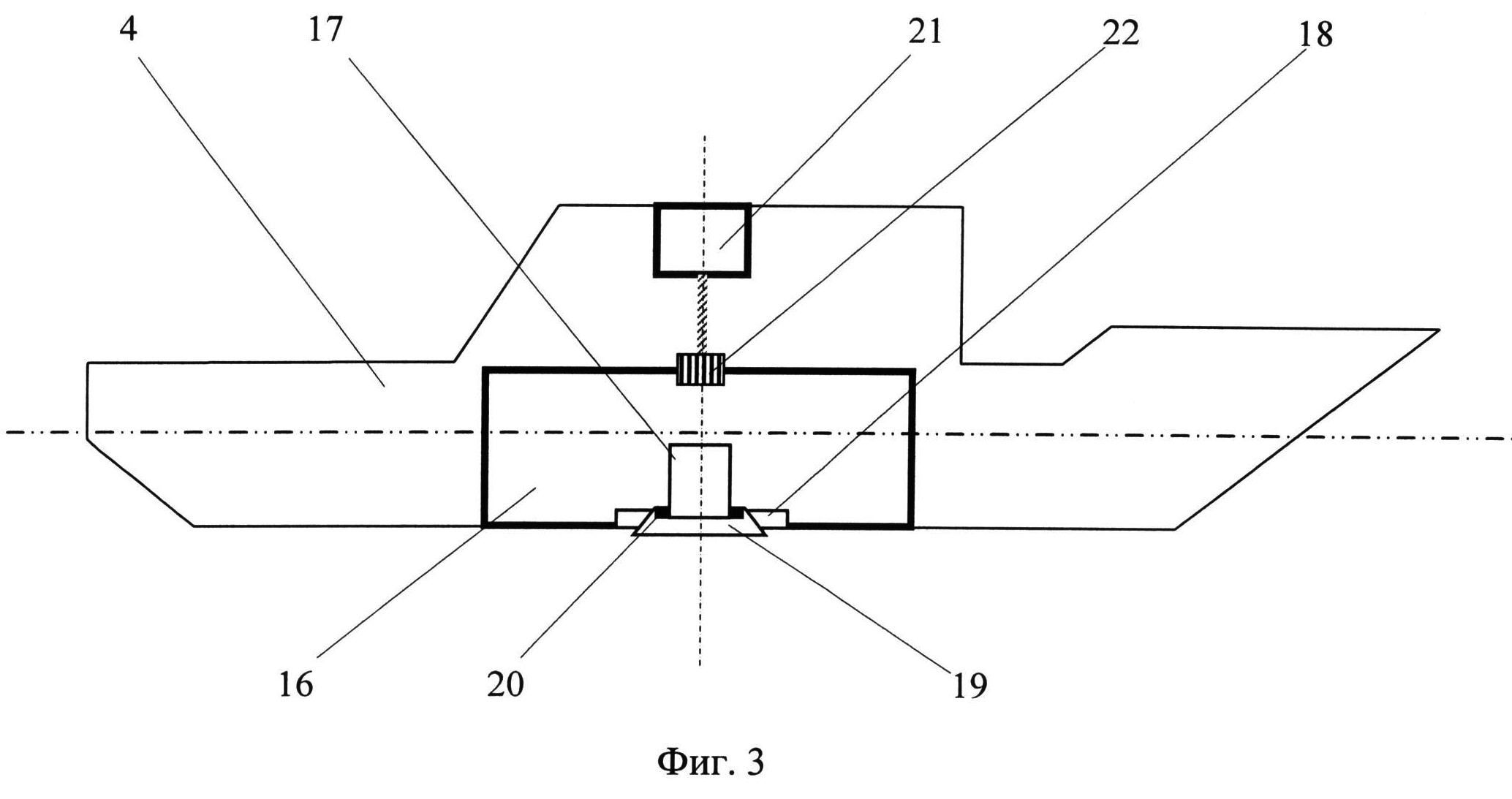
Надводное судно - 4 (Фиг.3) имеет осушаемый трюм - 16, в котором размещена вертикальная шахта - 17, нижний срез которой расположен под днищем судна - 4 и на котором размещено стыковочное устройство - 18 с конусной ловушкой - 19 и фланцем - 20 для плотного контакта с торцом комингса - 9 (см. также Фиг.1) сетчатой оболочки - 5 (см. также Фиг.1). Верхний срез шахты - 17 расположен ниже уровня акватории. Над шахтой - 17 размещен тросовый спускоподъемный механизм - 21 с автоматическим захватным устройством - 22, выполненным преимущественно в виде разжимной цанги для втягивания комингса - 9 (см. также Фиг.1) сетчатой оболочки - 5 (см. также Фиг.1) в конусную ловушку - 19 стыковочного устройства - 18.
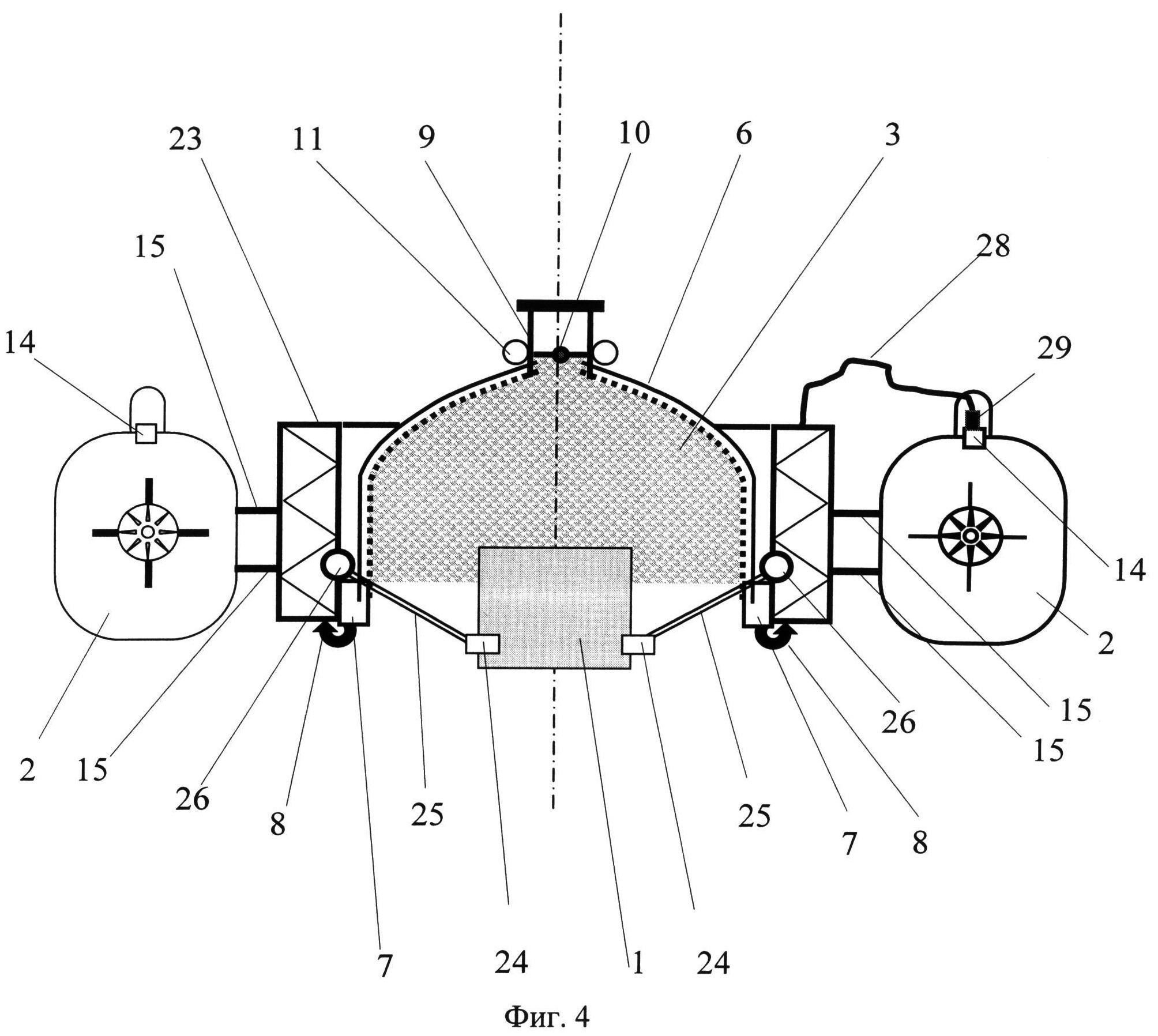
Комплекс (Фиг.4 и 5), преимущественно для транспортировки массивных подводных объектов содержит плоскую раму - 23 с рымами (не показаны) для крюков - 8 сетчатой оболочки - 5 и дистанционно управляемыми захватными устройствами - 24 на штоках регулируемой длины - 25, которые закреплены на раме - 23 с помощью шарниров - 26. Промежутки между штоками - 25 затянуты сетчатыми пластинами - 27, закрепленными одним краем на раме-23. Плоская рама - 23 имеет прочные конструктивные элементы (не показаны), совместимые с захватными устройствами - 15 самоходных подводных средств - 2, и кабель - 28 с подводной вилкой - 29 для подключения к управляемым разъемам - 14 самоходных подводных средств - 2.
Комплекс (Фиг.6) для работы в акваториях, где глубина не позволяет непосредственно подтянуть комингс - 9 к стыковочному устройству - 18, дополнительно включает трубопровод - 30, один конец которого выполнен в виде жесткого цилиндра с фланцем - 31 для упора на фланец - 20 вертикальной шахты - 17 надводного судна - 4. На втором конце трубопровода - 30 установлено управляемое с борта надводного судна стыковочное устройство - 32 с конусной ловушкой - 33 и опорным фланцем - 34 для плотного контакта трубопровода - 30 с торцом комингса - 9 сетчатой оболочки - 5.
Реализация способа транспортировки негабаритного подводного объекта с помощью комплекса происходит следующим образом (Фиг.1-8).
Объект транспортировки 1 на береговой площадке подготавливают к транспортировке. Также производят подготовку сетчатой оболочки 5. Для этого, основываясь на предварительном расчете необходимого количества плавучих элементов. Затем с помощью механизма 11, который для этого через кабель 12 временно подключают к береговому источнику электроэнергии, регулируют и фиксируют длину внешних связей 6, таким образом, устанавливая предварительные размеры сетчатой оболочки 5.
С помощью подъемного крана сетчатую оболочку 5 надевают на объект 1 и скрепляют ее с объектом с помощью крюков 8 захватных устройств 7 (см. Фиг.1).
Объект 1 вместе с установленной на нем сетчатой оболочкой 5 устанавливают на площадку, расположенную на глубине, превышающей вертикальный размер сетчатой оболочки 5 (Фи.7). Погрузочная площадка может быть оборудована, например, в плавучем доке.
К месту установки транспортируемого объекта подводят самоходные подводные средства, погружают их рядом с объектом и с помощью управляемых захватных устройств 15 производят стыковку самоходных подводных средств 2 с объектом транспортировки 1. С помощью подводной вилки 13 подключают кабель 12 привода (не показан) заслонки 10 и механизма фиксации и натяжения 11 к управляемому разъему 14. При этом заслонка 10 комингса 9 сетчатой оболочки 5 закрыта.
Далее с помощью гибких рукавов, по которым прокачивают воду из акватории, производят заполнение сетчатой оболочки плавучими телами 3. При этом выходные отверстия рукавов предварительно располагают в требуемом порядке и направляют в заранее определенные области пространства под сетчатой оболочкой 5. Ввод плавучих тел в рукава производят с использованием подходящих инжекционных устройств (в зависимости от глубины по маршруту транспортировки и на месте доставки объекта в качестве плавучих тел могут быть использованы шары из полистирола, твердого пенопласта, полимерные или металлические сферы).
По завершении заполнения сетчатой оболочки 5 необходимым количеством плавучих тел с помощью механизма 11 производят окончательную затяжку и фиксацию внешних натяжных связей 6 сетчатой оболочки 5.
Далее, используя дополнительные цистерны уравнительных и дифферентных систем, которыми оснащены самоходные подводные средства 2, производят вывеску системы «объект - самоходные подводные средства» оставаясь в подводном положении. В процессе вывески, при необходимости, под оболочку 5 может быть введено дополнительное количество плавучих тел. После этого система «объект - самоходные подводные средства» переходит в надводное положение.
Затем систему «объект - самоходные подводные средства» выводят в исходную точку маршрута транспортировки по ледовому каналу, проделанному надводным судном 4. Далее система погружается на необходимую глубину и следует в сопровождении судна 4 к месту назначения транспортируемого объекта. При достаточной глубине на месте формирования система может начать движение по маршруту в подводном положении без помощи надводного судна.
Достигнув места назначения с помощью самоходных подводных средств 2, система «объект - самоходные подводные средства» ложится на грунт или на площадку, приготовленную для установки подводного объекта, используя при этом те же приемы, что и при постановке подводных лодок на якорь в подводном положении.
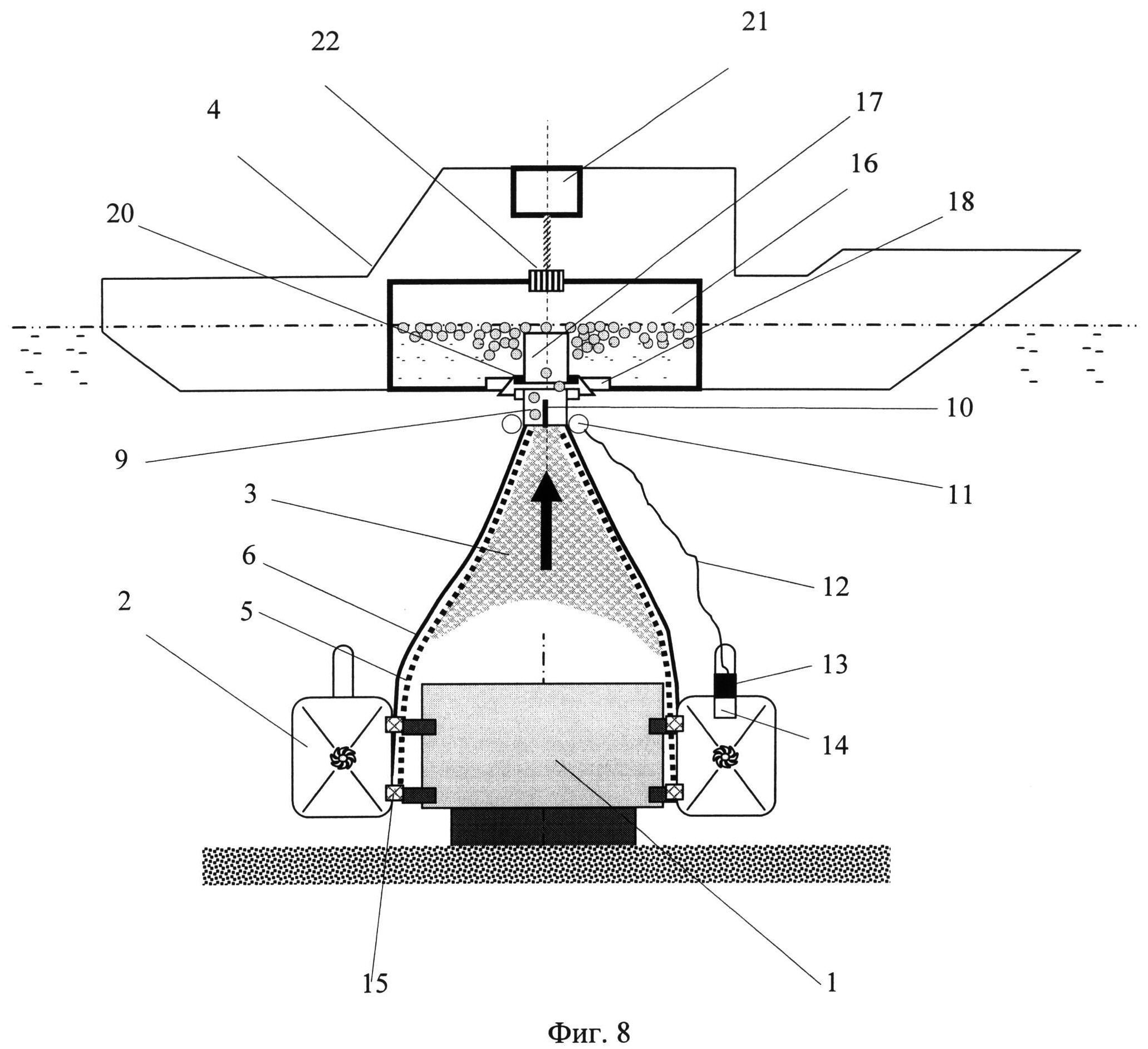
Далее начинается процесс освобождения сетчатой оболочки от плавучих тел и механической связи с объектом транспортировки (Фиг.8).
Надводное судно 4, принимает положение над объектом транспортировки 1. После этого с помощью спускоподъемного механизма 21 через шахту 17 осушаемого трюма 16 в комингс 9 сетчатой оболочки 5 опускают разжимное захватное устройство 22. По команде с подводных средств 2 передаваемой по кабелю 12 механизмы фиксации 11 освобождают гибкие внешние связи 6 сетчатой оболочки 5. После этого с помощью спускоподъемного механизма 21 подтягивают комингс 9 к стыковочному устройству 18 вплоть до стыковки комингса 9 с фланцем 20 шахты 17. По команде с борта самоходного подводного средства 2, передаваемой по кабелю 12 через разъем 13 открывают заслонку 10.
Плавучие элементы 3 свободно всплывают на поверхность воды в трюм 16 надводного судна. При этом для облегчения и ускорения выхода плавучих элементов, заслонка 10 под действием своего привода (не показан) совершает малые колебания относительно среднего положения.
После переход всех плавучих тел 3 в трюм 16 надводного судна 4 по кабелю 12 с подводного средства 2 подается команда на срабатывание захватных устройств 7 сетчатой оболочки 5 (см. также Фиг.1). Оболочка освобождается от механического контакта с объектом 1. Одновременно с помощью управляемого подводного разъема 14 отсоединяют вилку 13 кабеля 12 (см. также Фиг.2).
После этого срабатывают захватные устройства 15 самоходных подводных средств 2. Происходит разъединение самоходных средств 2 и объекта транспортировки 1.
Затем сетчатую оболочку с помощью спускоподъемного механизма 21 и захватного устройства 22 приподнимают и принимают на борт судна 4.
Далее самоходные подводные средства 2 в сопровождении надводного судна 4 возвращаются в пункт базирования для подготовки к следующей транспортной операции.
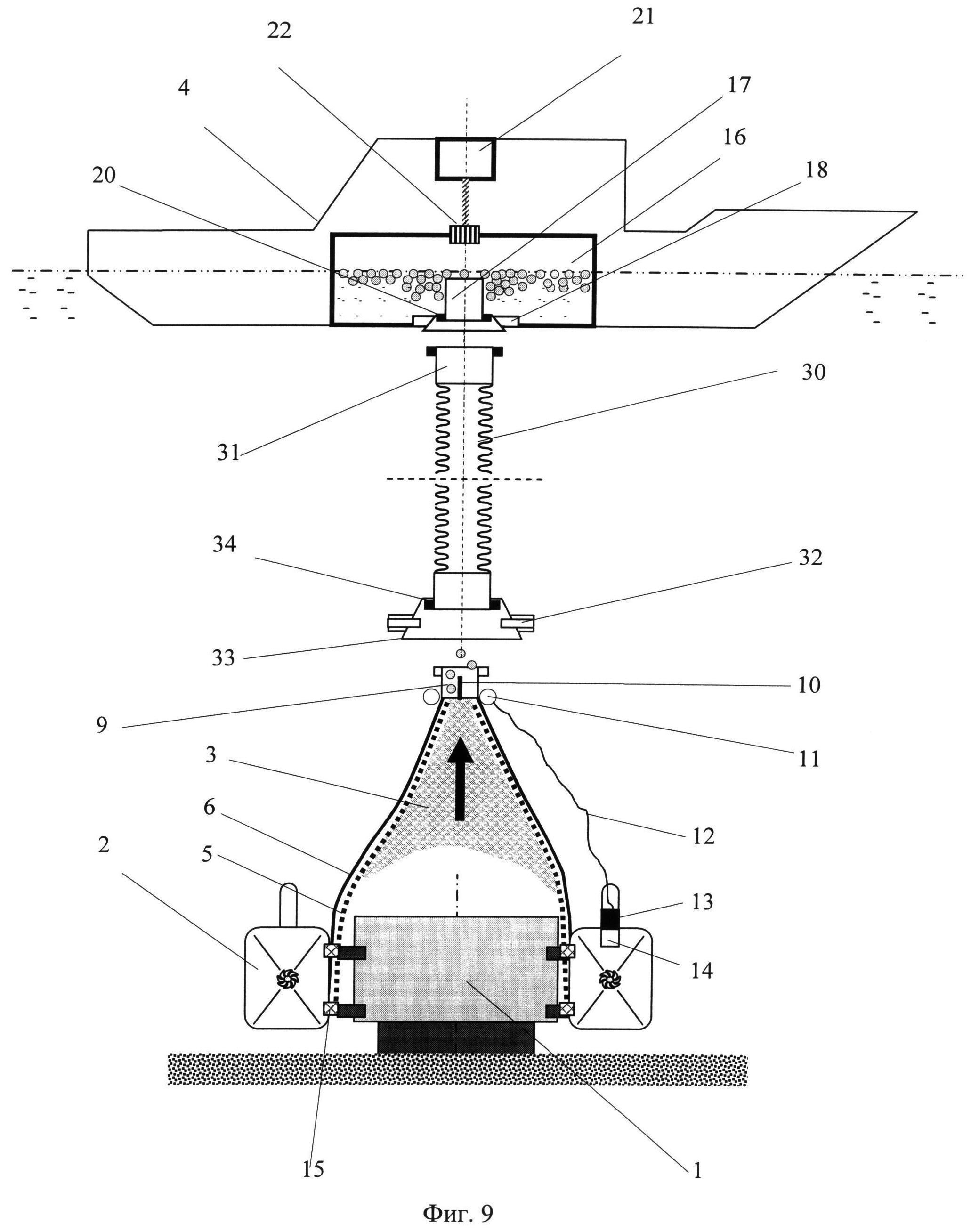
В том случае, когда глубина моря в месте установки транспортируемого объекта не позволяет стыковать комингс 9 к фланцу 20 стыковочного устройства 18 надводного судна 4 процесс освобождения сетчатой оболочки от плавучих тел и механической связи с объектом транспортировки осуществляется следующим образом (Фиг.9).
С помощью спускоподъемного устройства 21 и захватного устройства 22 через шаху 17 к комингсу 9 сетчатой оболочки 5 опускают трубопровод 30.
С помощью конусной ловушки 33 осуществляют стыковку торца комингса 9 с фланцем 34 и по команде с надводного судна 4 фиксируют их взаимное положение с помощью стыковочного устройства 32 (трубопровод 30 необходимой длины формируют предварительно на стадии подготовки транспортной операции, например, путем сборки его из коротких секций). Длина трубопровода должна несколько превышать расстояние между фланцем 20 и торцом комингса 9 сетчатой оболочки 5. Другие действия осуществляются также и в том же порядке как это описано выше.
Если транспортируемый объект имеет подводный вес, для компенсации которого не хватает объема сетчатой оболочки в случае ее присоединения непосредственно к корпусу объекта, используют промежуточную раму 23 (Фиг.4 и 5).
Подготовка комплекса к транспортной операции происходит следующим образом.
На береговой площадке транспортируемый подводный объект 1 устанавливают внутри рамы 23.
С помощью захватный устройств 24 на штоках регулируемой длины 25 объект 1 скрепляют с рамой 23.
Затем сетчатую оболочку 5 с помощью крюков 8 захватных устройств 7 используя рымы (на рисунке не показаны) скрепляют с рамой 23. Затем собранную конфигурацию «объект - рама - сетчатая оболочка» устанавливают на погрузочной площадке. После этого с помощью захватных устройств 15 самоходные подводные средства 2 скрепляют с рамой 23 формируя, таким образом, систему «объект - рама - сетчатая оболочка - самоходные подводные средства».
С помощью вилки 29 подключают кабель 28 к управляемому разъему 14 самоходного подводного средства 2. Производят заполнение сетчатой оболочки 5 необходимым количеством плавучих тел 3 и вывешивание в подводном положении сформированной системы «объект - рама - сетчатая оболочка - самоходные подводные средства». Дальнейшие действия производят также, как это описано выше.
После завершения перехода к месту доставки объекта и покладки системы «объект - рама - сетчатая оболочка - самоходные подводные средства» на грунт сетчатую оболочку 5 освобождают от плавучих тел 3 также как это описано выше с применением или без применения трубопровода 30 (см. также Фиг.8 и 9).
После этого срабатывают захватные устройства 15 и управляемый разъем 14 самоходных подводных средств 2. Самоходные подводные средства отделяются от рамы 23.
Раму вместе с сетчатой оболочкой принимают на борт надводного судна 4.
Далее самоходные подводные средства в сопровождении надводного судна возвращаются в пункт базирования для подготовки к следующей транспортной операции.
Предлагаемый способ транспортировки негабаритного подводного объекта и комплекс для его реализации обеспечивают независимость процесса транспортировки подводных объектов от наличия и состояния ледового покрова акватории, минимизацию водоизмещения самоходных подводных транспортных средств, универсализацию комплекса транспортировки негабаритных подводных объектов по отношению к массе и габаритам транспортируемого подводного объекта, упрощение и удешевление эксплуатации комплекса, упрощение и удешевление модернизации комплекса, улучшение экологических параметров комплекса.

Воздухоочистительное устройство для судовых энергетических установок
Фильтр для очистки воздуха
Способ получения активного угля
Способ определения свободного глиоксаля в глиоксальсодержащих карбамидоформальдегидных смолах
Система управления ступенями поворотных лопаток статора компрессора высокого давления
Реверсивное устройство турбореактивного двигателя
Способ защиты почв от остатков пестицидов
Высокочастотный плазмотрон
Разъемное соединение трубы из полимерных композиционных материалов
Способ осуществления подъемно-транспортной операции и подводное судно для его осуществления
Воздухоочистительное устройство для судовых энергетических установок
Фильтр для очистки воздуха
Способ получения активного угля
Способ определения свободного глиоксаля в глиоксальсодержащих карбамидоформальдегидных смолах
Система управления ступенями поворотных лопаток статора компрессора высокого давления
Реверсивное устройство турбореактивного двигателя
Способ защиты почв от остатков пестицидов
Высокочастотный плазмотрон
Разъемное соединение трубы из полимерных композиционных материалов
Способ осуществления подъемно-транспортной операции и подводное судно для его осуществления

