Результат интеллектуальной деятельности: СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩЕГОСЯ СУДНА
Вид РИД
Изобретение
Изобретение относится к области внешнего наблюдения движущихся судов радиолокационными станциями и предназначено для сопровождения траектории судна путем оценки его координат и вектора скорости движения на всем протяжении его траектории.
Одной из задач современного морского транспорта является повышение безопасности движения. Для достижения этой цели автоматизированные системы управления морским движением используют радиолокационную информацию. После первичной обработки радиолокационной информации осуществляется процесс ее вторичной цифровой обработки, который обычно выполняется с помощью программированных алгоритмов. В результате вторичной обработки вычисляются текущие координаты и вектор скорости движения каждого судна. Для управления движением и предупреждения столкновений и других опасных ситуаций на основе данных о координатах и векторе скорости каждого судна вырабатываются команды (рекомендации) по коррекции траектории движения. При этом качество управления движением зависит от надежности и точности алгоритмов оценки текущих координат и вектора скорости движения каждого судна.
В настоящее время широко используются способы оценки текущих координат и вектора скорости движения судна, в которых в текущий момент времени с помощью радиолокационной станции измеряют координаты судна и сглаживают параметры траектории судна с помощью α-β фильтра.
При прямолинейном и равномерном движении судна сглаживающим коэффициентам α и β должны быть заданы малые положительные значения, близкие к нулю, в то время как при его маневрировании сглаживающим коэффициентам α и β должны быть заданы значения, близкие к единице. Если сопровождение траектории движения судна, реализуемое с малыми положительными значениями сглаживающих коэффициентов α и β, применяется для маневрирующего судна, либо, напротив, указанное сопровождение, реализуемое со значениями сглаживающих коэффициентов α и β, близкими к единице, используется при прямолинейном равномерном движении судна, оценка текущих координат и вектора скорости движения в обоих случаях происходит с большой ошибкой. Таким образом, поскольку величина сглаживающих коэффициентов α и β зависит от характера движения судна, алгоритмы сопровождения траектории судна должны включать в себя вычисление значений сглаживающих коэффициентов с учетом этого характера.
Известен способ сопровождения траектории движущегося судна, описанный в работе (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. М.: Радио и связь. 1993, с.182), в котором на основе вычисления разности между текущими измерениями координат судна и их экстраполированными значениями (невязки измерения) и сравнения этой разности с пороговым значением выявляют маневр судна, после чего принимают значения сглаживающих коэффициентов α и β равными единице (альфа-бета алгоритм с детектором маневра). Недостаточная точность известного способа определяется тем, что при таком подходе к выбору сглаживающих коэффициентов учитывается только факт наличия маневра судна и не учитывается его интенсивность. Таким образом, наличие в движении судна участков маневренного движения приводит к значительной ошибке в оценке текущих координат и вектора скорости движения, поскольку интенсивность маневрирования, и соответственно, значения сглаживающих коэффициентов α и β, обеспечивающие наилучшее сопровождение, остаются неизвестными.
Наиболее близким к заявляемому является способ сопровождения маневрирующей воздушной цели (пат. РФ №2048684, опубл. 1995.11.20), включающий радиолокационные измерения координат и оценку текущих параметров траектории движения путем сглаживания с помощью а - (3 фильтра. В известном способе определяется вероятность того, что цель является маневрирующей, и по значению этой вероятности вычисляются значения сглаживающих коэффициентов α и β, обеспечивающие наилучшее сопровождение. При этом для вычисления вероятности маневра необходимо априорное задание дисперсии ошибок измерений координат. Поскольку радиолокационный образ малой воздушной цели представляет собой одиночное значение амплитуды отраженного эхо- сигнала, то для малой цели дисперсия ошибок измерений координат соответствует известной инструментальной погрешности радара.
В отличие от малой воздушной цели, судно является протяженным объектом, вследствие чего радиолокационный образ при высоком разрешении радара представляет собой не одиночное значение амплитуды отраженного эхо-сигнала, а матрицу таких амплитуд, сложно распределенных и зависящих от ориентации судна и расположения на нем локальных источников отраженного эхо-сигнала, а также от состояния подстилающей поверхности (волнения моря) и метеоусловий (Дорожко В.М. Имитационная модель радиолокационного эхо-сигнала // Дальневосточный математический журнал. - 2001. - №1. - С.98-113). При этом вероятностные характеристики ошибок измерений координат конкретного судна в конкретных условиях невозможно определить, исходя из известной инструментальной погрешности радара. Реальная дисперсия измерений координат судна всегда будет неизвестна и будет гораздо выше, чем дисперсия инструментальной погрешности радара. Таким образом, при реализации известного способа сопровождения для судна определение вероятности маневра происходит с большой ошибкой, что приводит к тому, что при наличии в движении судна участков как прямолинейного равномерного, так и маневренного движения, оценка текущих координат и вектора скорости движения судна также осуществляется со значительной ошибкой.
Задачей изобретения является создание способа сопровождения траектории движущегося судна, с высокой точностью обеспечивающего указанное сопровождение при наличии в движении судна участков прямолинейного равномерного, а также маневренного движения, когда неизвестны вероятностные характеристики ошибок измерений координат.
Технический результат изобретения заключается в повышении точности оценки текущих координат и вектора скорости движения судна при наличии в его движении участков прямолинейного и равномерного, а также маневренного движения.
Указанный технический результат достигается способом сопровождения траектории движущегося судна, включающим радиолокационное измерение координат, оценку текущих параметров траектории движения путем сглаживания с помощью α-β фильтра, в котором, в отличие от известного, дополнительно выполняют формирование и запоминание вектора текущих измерений координат судна, формирование и запоминание вектора возможных значений сглаживающих коэффициентов а и р, осуществляют моделирование сопровождения траектории с каждым из возможных значений сглаживающих коэффициентов α и β, формирование и запоминание вектора среднеквадратичных отклонений разности между текущими измерениями координат судна и их вычисленными при моделировании сопровождения значениями, затем выбирают из вектора возможных значений сглаживающих коэффициентов α и β значения  и
и  соответствующие минимальному среднеквадратичному отклонению разности между текущими измерениями координат судна и их вычисленными при моделировании траектории сопровождения значениями, и сглаживают параметры траектории судна с помощью α-β фильтра с выбранными коэффициентами
соответствующие минимальному среднеквадратичному отклонению разности между текущими измерениями координат судна и их вычисленными при моделировании траектории сопровождения значениями, и сглаживают параметры траектории судна с помощью α-β фильтра с выбранными коэффициентами  и
и  . Схематично реализация предлагаемого способа показана на фиг.1, где приведена блок-схема его последовательных операций:
. Схематично реализация предлагаемого способа показана на фиг.1, где приведена блок-схема его последовательных операций:
1) радиолокационное измерение координат судна;
2) формирование и запоминание вектора текущих измерений координат судна;
3) формирование и запоминание вектора возможных значений сглаживающих коэффициентов α и β;
4) моделирование сопровождения траектории с каждым из возможных значений сглаживающих коэффициентов α и β;
5) формирование и запоминание вектора среднеквадратичных отклонений разности между текущими измерениями координат судна и их вычисленными при моделировании сопровождения значениями;
6) выбор из вектора возможных значений сглаживающих коэффициентов α и β таких значений
и
, которые соответствуют минимальному среднеквадратичному отклонению разности между текущими измерениями координат судна и их вычисленными при моделировании сопровождения значениями;
7) сглаживание параметров траектории судна с помощью α-β фильтра с использованием сглаживающих коэффициентов
и
, выбранных на этапе 6.
Технически способ осуществляют следующим образом.
С помощью измерительного устройства на основе радара в точные моменты времени tj измеряют значения декартовых координат судна zx(tj), zy(tj), где zx(tj) - измерение декартовой координаты судна х, a zy(tj) - измерение декартовой координаты судна y.
После этого формируют и запоминают вектор Z текущих измерений декартовых координат судна. Это осуществляют следующим образом.
Пусть N - количество моментов времени, в которые производились текущие измерения декартовых координат судна zx(tj) и zy(tj). Тогда вектор Z текущих измерений декартовых координат судна формируется из N последних текущих измерений декартовых координат судна таким образом:
Z=(zx(tj-N),xy(tj-N),zx(tj-N+1),zy(tj-N+1),…,zx(tj-1),zy(tj-1),zx(tj),zy(tj))
Одновременно формируют вектор возможных значений сглаживающих коэффициентов α и β. Это осуществляют следующим образом
Пусть α - сглаживающий коэффициент, применяемый при вычислении координат судна x, y, α β - сглаживающий коэффициент, применяемый при вычислении компонент вектора скорости судна vx,vy. Известно, что сглаживающие коэффициенты аир могут принимать значения в интервале от 0 до 1, причем имеет место соотношение β=α2/(2-α) (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. М.: Радио и связь. 1993, с.177).
Вектор А возможных значений сглаживающих коэффициентов а по условию включает следующие компоненты
А=(α1,α2,…,α10)=(0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9,1.0) - всего 10 компонентов. Компоненты вектора В возможных значений сглаживающих коэффициентов β по условию вычисляются из компонент вектора А таким образом, что В=(β1,β2,…,β10) - тоже всего 10 компонент, причем βk=αk 2/(2-αk).
После этого моделируют сопровождение траектории с каждым из возможных значений сглаживающих коэффициентов αk и βk, используя известный алгоритм: при моделировании сопровождения траектории в каждый момент времени ti вычисляют текущие координаты и компоненты вектора скорости судна путем реализации итерационной процедуры
 .
.
Здесь i - номер момента времени соответствующих измерений из вектора текущих измерений декартовых координат судна Z, причем  ,
,  - оценка вектора si, который равен
- оценка вектора si, который равен

Zi - вектор измерений текущих координат судна, формируемый из значений вектора Z таким образом, что

Ф и H - матричные коэффициенты, равные


К - матричный коэффициент, равный

Процедуру сопровождения (1) реализуют для вектора Z текущих измерений декартовых координат судна при каждом из 10 возможных значений сглаживающих коэффициентов αk и βk,  , выбираемых из векторов А и В.
, выбираемых из векторов А и В.
В результате моделирования формируются 10 векторов (для каждого из выбранных αk и βk) разностей между текущими измерениями декартовых координат судна и их вычисленными при моделировании сопровождения значениями. Обозначим второй сомножитель второго слагаемого в формуле (1) как δz(ti), причем 
Вектор Δk разницы между текущими измерениями декартовых координат судна и их вычисленными при моделировании сопровождения (с выбранными значениями αk и βk) значениями будет иметь компоненты:

Далее формируют и запоминают вектор R среднеквадратичных отклонений разницы между текущими измерениями декартовых координат судна и их вычисленными при моделировании сопровождения значениями. Это осуществляют, вычисляя среднеквадратичное отклонение для каждого вектора Δk таким образом, что

В результате формируется вектор R: R=(δ1,δ2,…,δ10).
Затем выбирают из вектора А возможных значений сглаживающих коэффициентов α и β те значения, которые соответствуют минимальному среднеквадратичному отклонению разницы между текущими измерениями декартовых координат судна и их вычисленными при сопровождении значениями. Это делается путем выбора из вектора R минимальной компоненты δk, определения ее индекса kmin, а затем выбора из векторов А и В компонент  и
и  , соответствующих индексу kmin.
, соответствующих индексу kmin.
После этого, используя выбранные значения коэффициентов  и
и  , сглаживают параметры траектории судна с помощью α-β фильтра в соответствии с известным способом путем реализации описанной выше итерационной процедуры (1).
, сглаживают параметры траектории судна с помощью α-β фильтра в соответствии с известным способом путем реализации описанной выше итерационной процедуры (1).
В результате формируется оценка текущих координат судна  ,
,  и компонент вектора скорости
и компонент вектора скорости  ,
, .
.
Пример конкретного осуществления способа
Численное моделирование сопровождения траектории движущегося судна при помощи предлагаемого способа осуществляется при следующих условиях.
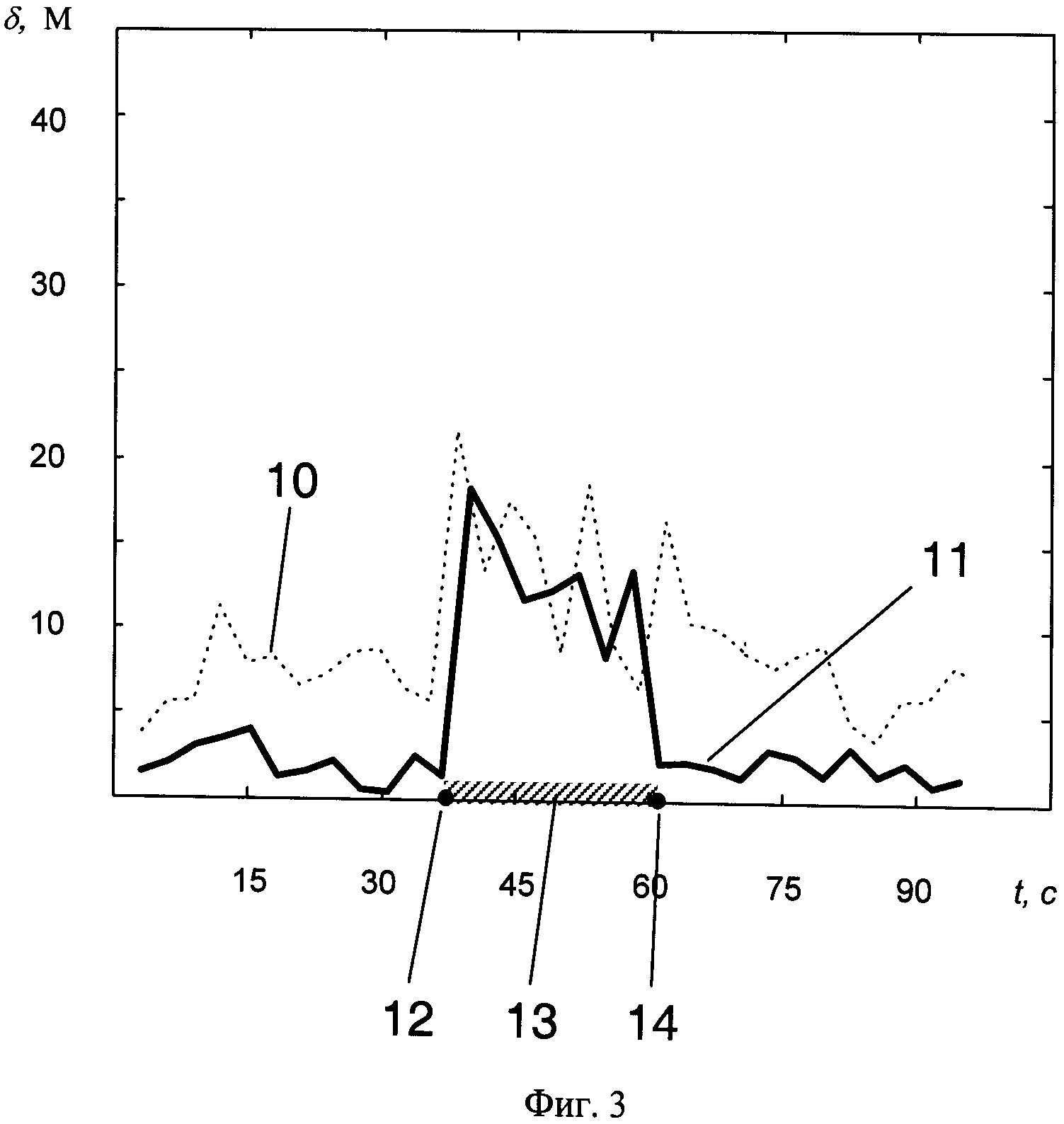
С помощью измерительного устройства (радара) для судна, движущегося по траектории, имеющей участки как прямолинейного и равномерного, так и маневренного движения, обеспечивается измерение азимута судна и расстояния до него с периодом tj-tj-1=3 c. Судно движется со скоростью 20 м/с из точки 8 в точку 9 (фиг.2). Вначале его движение является прямолинейным и равномерным, а затем судно совершает маневр - движется по дуге окружности радиусом 300 м, после чего снова движется прямолинейно и равномерно. Размерность вектора Z текущих измерений ограничена значением N=10.
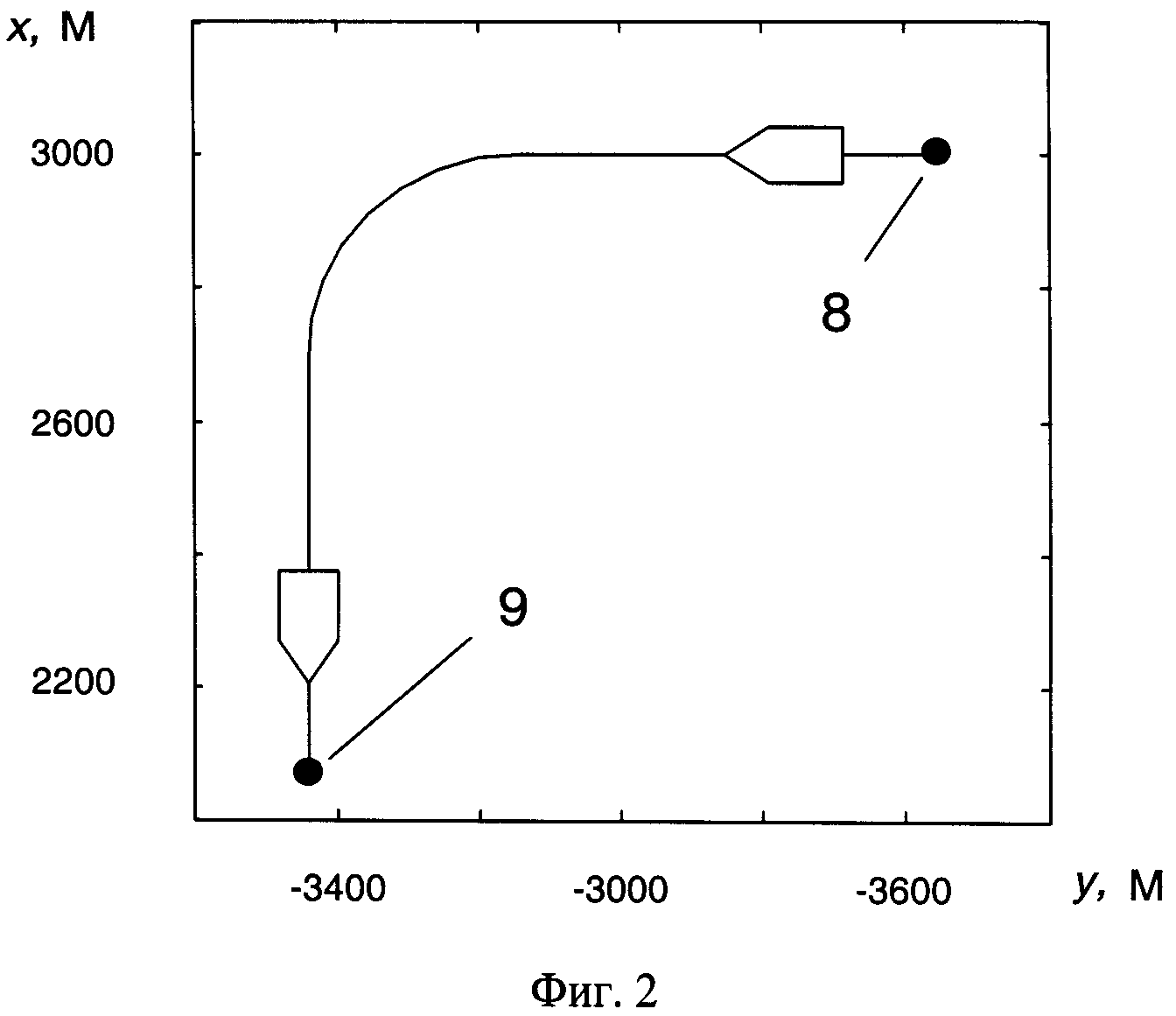
Результаты моделирования представлены на фиг.2 и 3. На фиг.2 показана моделируемая траектория движения судна. На фиг.3 показана диаграмма погрешностей оценивания координат судна по прототипу (10 - пунктирная линия) и предлагаемым способом (11 - сплошная линия). По оси абсцисс отложено время tj от начала сопровождения траектории, по оси ординат - величина  .
.
Здесь 12 - момент начала маневрирования судна, 13 (заштрихованный участок оси абсцисс) - отрезок времени, во время которого происходит маневр судна, 14 - момент окончания маневрирования судна.
При этом инструментальные среднеквадратичные погрешности измерений координат судна приняты равными σx=5 м, σy=5 м, а реальные (численно
моделируемые) среднеквадратичные погрешности измерений координат судна приняты равными в два раза больше априорно известных инструментальных.
Из фиг.3 видно, что на участках прямолинейного равномерного движения погрешность известного способа сопровождения траектории судна гораздо выше, чем предлагаемого, а на участках маневренного движения погрешности известного и заявляемого способа являются сравнимыми.
Таким образом, предлагаемый способ позволяет уменьшить ошибку вычисления текущих координат и вектора скорости движения судна и обеспечивает лучшее качество сопровождения в сравнении с известным способом, в частности, в том случае, когда априорные представления о погрешностях измерений координат недостоверны.
Способ сопровождения траектории движущегося судна, включающий радиолокационное измерение координат, оценку текущих параметров траектории движения путем сглаживания с помощью α-β фильтра, отличающийся тем, что дополнительно выполняют формирование и запоминание вектора текущих измерений координат судна, формирование и запоминание вектора возможных значений сглаживающих коэффициентов α и β, осуществляют моделирование сопровождения траектории с каждым из возможных значений сглаживающих коэффициентов α и β, формирование и запоминание вектора среднеквадратичных отклонений разности между текущими измерениями координат судна и их вычисленными при моделировании сопровождения значениями, затем выбирают из вектора возможных значений сглаживающих коэффициентов α и β значения и , соответствующие минимальному среднеквадратичному отклонению разности между текущими измерениями координат судна и их вычисленными при моделировании траектории сопровождения значениями, и сглаживают параметры траектории судна с помощью α-β фильтра с выбранными коэффициентами и .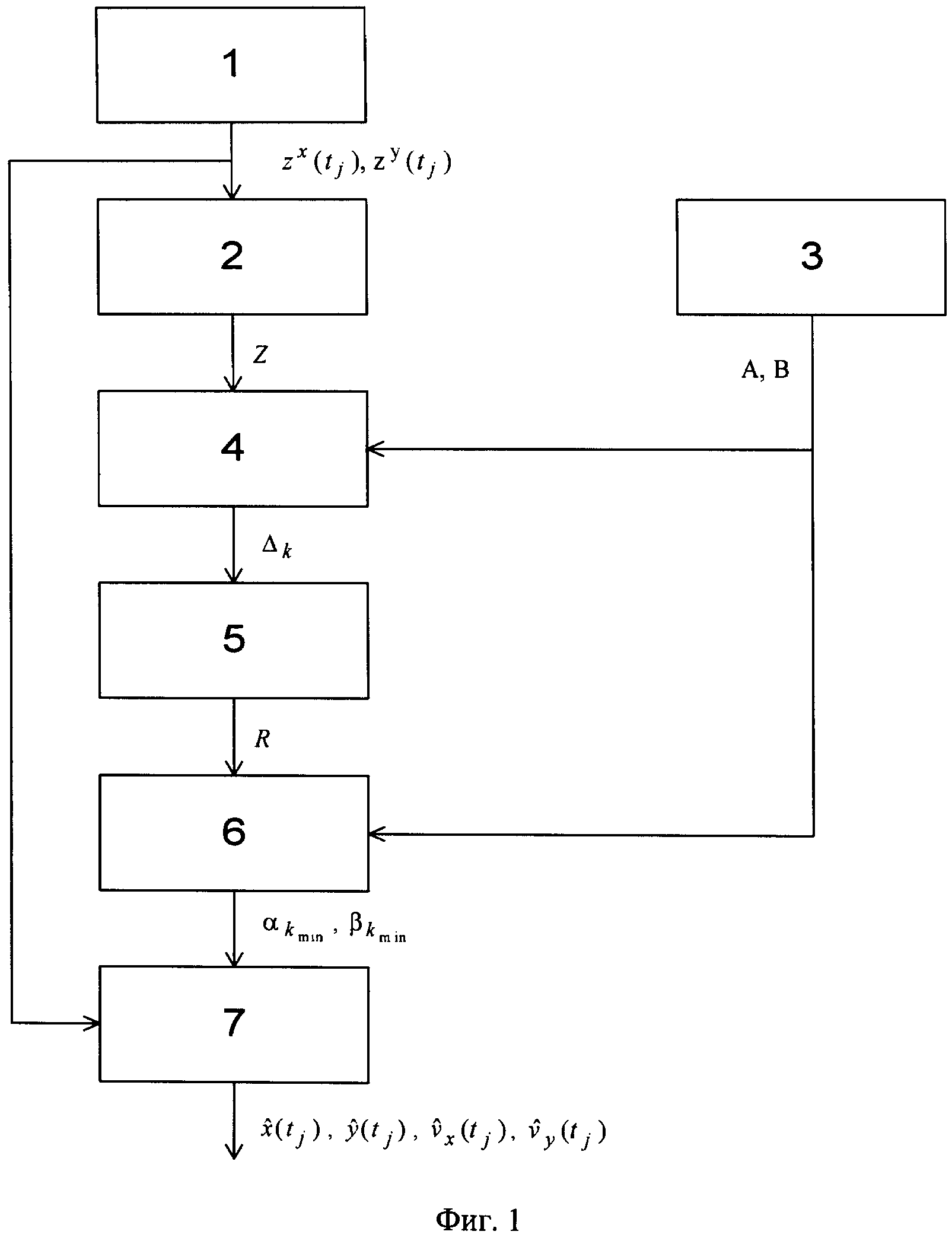
Устройство для намотки в рулон длинномерных сдублированных в пакет легкодеформируемых материалов
Устройство для измерения продольной и поперечной деформации легкодеформируемых трикотажных полотен
Оптоэлектронное устройство для исследования деформационных характеристик волокнистых систем
Устройство для оценки раздвигаемости нитей текстильных материалов
Устройство для измерения длины легкодеформируемых текстильных материалов с учетом их деформации
Способ получения силикатного сорбента
Способ оценки воздухопроницаемости легкодеформируемых композитных материалов
Состав для приготовления блинов
Устройство для измерения параметров раздвигаемости нитей текстильных материалов
Способ крепления съемных отделочных манжет
Устройство для намотки в рулон длинномерных сдублированных в пакет легкодеформируемых материалов
Устройство для измерения продольной и поперечной деформации легкодеформируемых трикотажных полотен
Оптоэлектронное устройство для исследования деформационных характеристик волокнистых систем
Способ определения жесткости легкодеформируемых композитных материалов
Устройство для оценки раздвигаемости нитей текстильных материалов
Устройство для измерения длины легкодеформируемых текстильных материалов с учетом их деформации
Способ получения силикатного сорбента
Способ оценки воздухопроницаемости легкодеформируемых композитных материалов
Состав для приготовления блинов
Устройство для измерения параметров раздвигаемости нитей текстильных материалов

