Результат интеллектуальной деятельности: ЦИФРОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ УПЛОТНЕНИЯ АСФАЛЬТОБЕТОННОЙ СМЕСИ
Вид РИД
Изобретение
Изобретение относится к технике для укладки дорожного покрытия, в частности к системам автоматического цифрового управления, и может быть использовано в процессе уплотнения асфальтобетонной смеси.
Известна система автоматического управления положением выглаживающей плиты асфальтоукладчика, содержащая датчик углового положения, датчик высотного положения, блок управления и гидравлические приводы, в датчике высотного положения применен емкостной чувствительный элемент, а органы управления размещены на датчиках (полезная модель РФ №6567, дата приоритета 21.05.1997, дата публикации 16.05.1998, авторы: Беззуб А.И. и др., RU.).
Недостатком известной системы является низкая эффективность системы автоматического цифрового управления, обусловленная тем, что при уплотнении асфальтобетонной смеси машинисту-оператору необходимо выполнять настройку рабочего органа асфальтоукладчика по высоте с помощью специального привода и визуально следить за параметрами работы асфальтоукладчика для обеспечения качественного дорожного покрытия.
В качестве прототипа принята система автоматического управления рабочего органа асфальтоукладчика, содержащая датчик углового положения с индикатором ошибки и переключателями задатчика стабилизируемого угла, датчик высотного положения с индикатором ошибки, блок управления, дискретные гидравлические приводы и тензометрический преобразователь усилия в металлоконструкции трамбующего бруса (полезная модель РФ №95688, дата приоритета 24.02.2010, дата публикации 10.07.2010, авторы Климов А.С.и др., RU, прототип).
Недостатком прототипа является низкая эффективность системы автоматического цифрового управления, обусловленная тем, что степень уплотнения асфальтобетонной смеси в процессе ее уплотнения контролируется тензометрическим преобразователем усилия в металлоконструкции трамбующего бруса, кроме того, в системе отсутствует адаптивный (сенсорный) датчик на раме рабочего органа асфальтоукладчика для мгновенного реагирования на изменение какого-либо фактора окружающей среды и технологического процесса, блок фазификатор для перевода исходных данных с датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, блок адаптивного управления для реализации процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, в результате чего формируются выходные лингвистические значения, блок дефазификатор для перевода лингвистических значений в точные значения результатов вычислений и формирования управляющих воздействий, подаваемых на дискретные гидравлические приводы, что снижает точность автоматического цифрового управления и приводит к длительному процессу укладки дорожного полотна во времени, значительному сокращению срока службы асфальтобетонного покрытия и снижению производительности дорожно-строительных работ.
Задачей изобретения является повышение эффективности цифровой адаптивной системы управления процессом уплотнения асфальтобетонной смеси за счет применения сенсорного датчика на раме рабочего органа асфальтоукладчика, обеспечивающего мгновенное реагирование на изменение какого-либо фактора окружающей среды и технологического процесса, блока фазификатора, обеспечивающего перевод исходных данных с датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, блока адаптивного управления, обеспечивающего реализацию процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, в результате чего формируются выходные лингвистические значения, блока дефазификатора, обеспечивающего перевод лингвистических значений в точные значения результатов вычислений и формирование управляющих воздействий, подаваемых на дискретные гидравлические приводы, а также повышение точности цифрового адаптивного управления и значительное сокращение процесса укладки дорожного полотна во времени, увеличение срока службы асфальтобетонного покрытия и производительности дорожно-строительных работ.
Для решения поставленной задачи цифровая адаптивная система управления процессом уплотнения асфальтобетонной смеси, содержащая датчик углового положения с индикатором ошибки и переключателями задатчика стабилизируемого угла, датчик высотного положения с индикатором ошибки, дискретные гидравлические приводы и тензометрический преобразователь усилия в металлоконструкции трамбующего бруса, согласно изобретению, она дополнительно содержит сенсорный датчик, установленный на раме рабочего органа асфальтоукладчика, блок фазификатор с четырьмя входами, блок адаптивного управления и блок дефазификатор, при этом датчик углового положения, вырабатывающий сигнал ошибки, пропорциональный величине отклонения рабочего органа асфальтоукладчика от гравитационной вертикали, связан с первым входом блока фазификатора, датчик высотного положения, вырабатывающий сигнал ошибки, пропорциональный величине отклонения рабочего органа от заданного копиром положения, связан со вторым входом блока фазификатора, тензометрический преобразователь усилия, вырабатывающий сигнал, пропорциональный усилию в металлоконструкции трамбующего бруса, связан с третьим входом блока фазификатора, а сенсорный датчик, вырабатывающий сигнал. пропорциональный изменению какого-либо фактора окружающей среды и технологического процесса, связан с четвертым входом блока фазификатора, блок фазификатор, обеспечивающий перевод исходных данных с упомянутых датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, связан с блоком адаптивного управления, реализующим процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, и формирующим выходные лингвистические значения для связанного с ним блока дефазификатора, обеспечивающего перевод лингвистических значений в точные значения результатов вычислений и формирующего управляющие воздействия, подаваемые на дискретные гидравлические приводы для сведения текущих ошибок к нулю.
На чертеже приведена функциональная схема расположения блоков цифровой адаптивной системы управления процессом уплотнения асфальтобетонной смеси.
Цифровая адаптивная система управления процессом уплотнения асфальтобетонной смеси содержит датчик углового положения 1, имеющий индикатор ошибки и переключателями задатчика стабилизируемого угла, датчик высотного положения 2, имеющий индикатор ошибки, тензометрический преобразователь усилия 3, сенсорный датчик 4, блок фазификатор 5, блок адаптивного управления 6, блок дефазификатор 7 и дискретные гидравлические приводы 8. Датчик углового положения 1 вырабатывает сигнал ошибки, пропорциональный величине отклонения рабочего органа асфальтоукладчика от гравитационной вертикали. Сигнал ошибки поступает с выхода датчика углового положения 1 на первый вход блока фазификатора 5. Датчик высотного положения 2 вырабатывает сигнал ошибки, пропорциональный величине отклонения рабочего органа от положения, заданного копиром. Сигнал ошибки поступает с выхода датчика высотного положения 2 на второй вход блока фазификатора 5. Тензометрический преобразователь усилия 3 вырабатывает сигнал, пропорциональный усилию в металлоконструкции трамбующего бруса, который поступает с выхода тензометрического преобразователя усилия 3 на третий вход блока фазификатора 5. Сенсорный датчик 4, установленный на раме рабочего органа асфальтоукладчика, вырабатывает сигнал, пропорциональный изменению какого-либо фактора окружающей среды и технологического процесса, который поступает с выхода сенсорного датчика 4 на четвертый вход блока фазификатора 5. Блок фазификатор 5 переводит исходные данные с датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, для блока адаптивного управления 6. Блок адаптивного управления 6 реализует процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, в результате чего формируются выходные лингвистические значения для блока дефазификатора 7. Блок дефазификатор 7 переводит лингвистические значения в точные значения результатов вычислений и формирует управляющие воздействия, подаваемые на дискретные гидравлические приводы 8 для сведения текущих ошибок к нулю. Длительность и частота управляющих сигналов зависит от величины ошибки.
Преимущество заявляемого технического решения заключается в повышении эффективности цифровой адаптивной системы управления процессом уплотнения асфальтобетонной смеси вследствие непрерывного процесса устройства дорожного полотна, за счет применения сенсорного датчика на раме рабочего органа асфальтоукладчика, обеспечивающего мгновенное реагирование на изменение какого-либо фактора окружающей среды и технологического процесса, блока фазификатора, обеспечивающего перевод исходных данных с датчиков, контролирующих управляющий процесс, в значения лингвистических переменных, блока адаптивного управления, обеспечивающего реализацию процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, в результате чего формируются выходные лингвистические значения, блока дефазификатора, обеспечивающего перевод лингвистических значений в точные значения результатов вычислений и формирование управляющих воздействий, подаваемых на дискретные гидравлические приводы, что в целом свидетельствует о повышении точности цифрового адаптивного управления и значительном сокращении процесса укладки дорожного полотна во времени, увеличение срока службы асфальтобетонного покрытия и производительности дорожно-строительных работ.
Цифровая адаптивная система управления процессом уплотнения асфальтобетонной смеси, содержащая датчик углового положения с индикатором ошибки и переключателями задатчика стабилизируемого угла, датчик высотного положения с индикатором ошибки, дискретные гидравлические приводы и тензометрический преобразователь усилия в металлоконструкции трамбующего бруса, отличающаяся тем, что она дополнительно содержит сенсорный датчик, установленный на раме рабочего органа асфальтоукладчика, блок фазификатор с четырьмя входами, блок адаптивного управления и блок дефазификатор, при этом датчик углового положения, вырабатывающий сигнал ошибки, пропорциональный величине отклонения рабочего органа асфальтоукладчика от гравитационной вертикали, связан с первым входом блока фазификатора, датчик высотного положения, вырабатывающий сигнал ошибки, пропорциональный величине отклонения рабочего органа от заданного копиром положения, связан со вторым входом блока фазификатора, тензометрический преобразователь усилия, вырабатывающий сигнал, пропорциональный усилию в металлоконструкции трамбующего бруса, связан с третьим входом блока фазификатора, а сенсорный датчик, вырабатывающий сигнал, пропорциональный изменению какого-либо фактора окружающей среды и технологического процесса, связан с четвертым входом блока фазификатора, блок фазификатор, обеспечивающий перевод исходных данных с упомянутых датчиков, контролирующих управляющий процесс в значения лингвистических переменных, связан с блоком адаптивного управления, реализующим процедуры нечеткого вывода на множестве продукционных правил, составляющих базу знаний системы управления, и формирующим выходные лингвистические значения для связанного с ним блока дефазификатора, обеспечивающего перевод лингвистических значений в точные значения результатов вычислений и формирующего управляющие воздействия, подаваемые на дискретные гидравлические приводы для сведения текущих ошибок к нулю.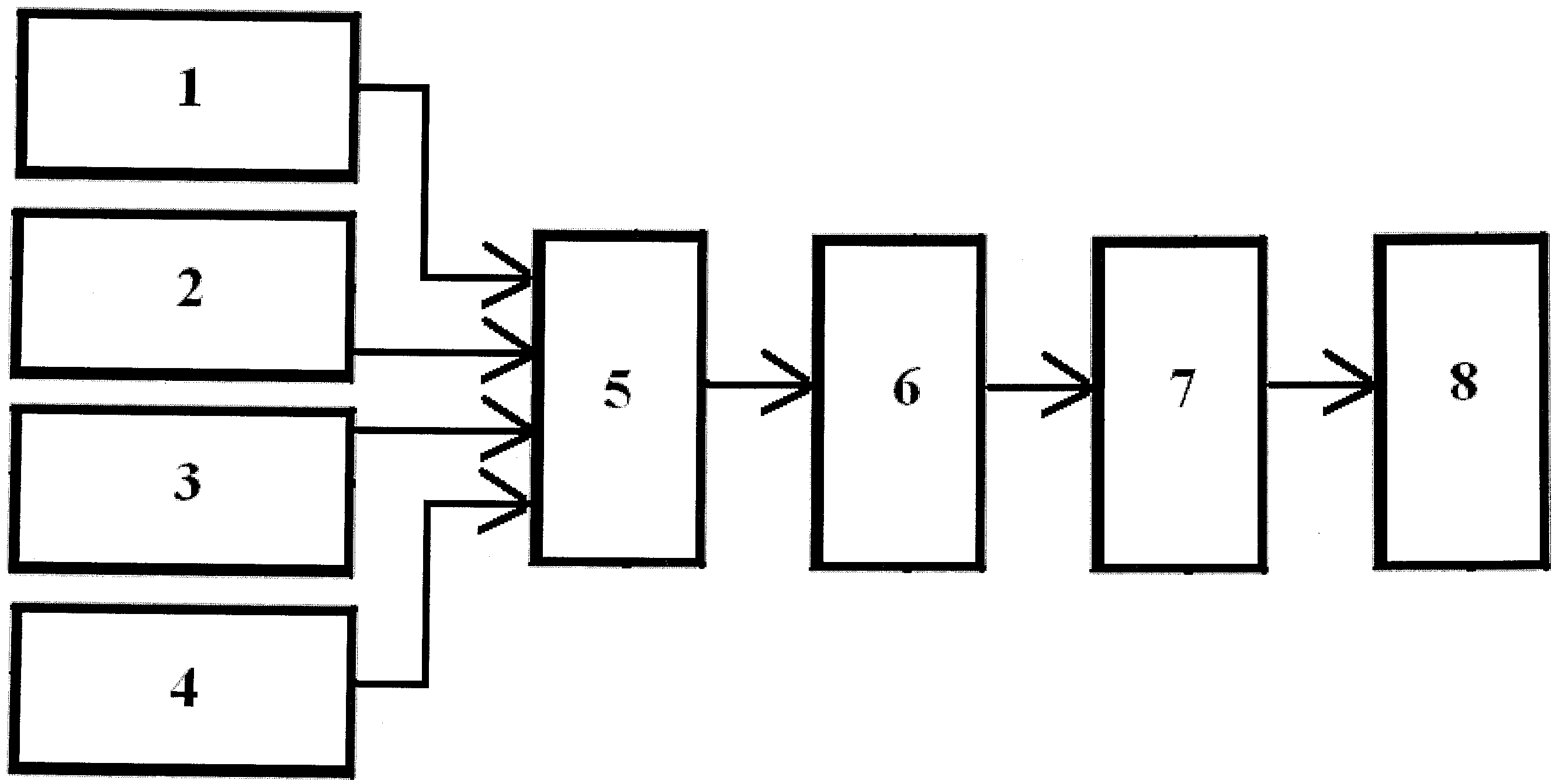
Способ извлечения золота из бедных малосульфидных руд
Установка для определения механических напряжений в конструкционных материалах
Способ измерения скорости ультразвука
Устройство для бурения скважин
Состав для очистки отработанных вод
Терморегулируемый ограждающий модуль вентилируемого подполья
Нейросетевая система автоматического управления уплотнением дорожных материалов асфальтоукладчиками

