МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП
Вид РИД
Изобретение
Изобретение относится к микроскопам и, в особенности, к многофункциональным сканирующим зондовым микроскопам, сокращенно «СЗМ», предназначенным для исследования образцов в различных режимах, таких как:
- туннельный режим,
- атомно-силовой режим,
- режим измерения твердости,
- жидкостной режим с использованием жидкостных ячеек и
- электрохимический режим с использованием электрохимических ячеек.
В частности, изобретение относится к многофункциональному сканирующему зондовому микроскопу, содержащему:
- основание,
- блок предварительного сближения, мобильно установленный на основании,
- пьезосканер, расположенный на блоке предварительного сближения,
- держатель объекта, расположенный на пьезосканере,
- образец, содержащий зону измерений и закрепленный с помощью держателя объекта на пьезосканере,
- платформу, закрепленную на основании напротив образца,
- анализатор, установленный на платформе и содержащий первую измерительную головку, обращенную к образцу и адаптированную для зондирования зоны измерений образца.
Такое устройство известно и описано в патенте Российской Федерации RU 2244332. Его недостаток заключается в том, что изменение указанных выше режимов работы либо связано со сложной переналадкой прибора, либо невозможно вообще.
Опираясь на это наблюдение, настоящее изобретение имеет целью предложить многофункциональный сканирующий зондовый микроскоп, позволяющий по меньшей мере сгладить как минимум один из указанных выше недостатков. Для достижения этой цели многофункциональный сканирующий зондовый микроскоп, соответствующий приведенному выше общему описанию, храктеризуется тем, что он содержит первую и вторую направляющие, закрепленные на платформе, тем что анализатор содержит вторую измерительную головку, обращенную к образцу и адаптированную для зондирования зоны измерений образца, и тем что первая и вторая измерительные головки мобильно установлены соответственно на первой и второй направляющих.
Благодаря такому устройству, многофункциональный сканирующий зондовый микроскоп прост в эксплуатации и имеет расширенные функциональные возможности, поскольку позволяет быструю смену режимов измерения, т.е. переход с одного режима измерения на другой без сложной переналадки прибора. Таким образом для эксплуатации изобретенного многофункционального сканирующего зондового микроскопа достаточно минимальных навыков работы оператора, что увеличивает безотказность прибора и уменьшает риск поломки прибора, например, из-за его частой переналадки оператором.
Существует вариант изобретения, в котором многофункциональный сканирующий зондовый микроскоп содержит оптический блок, закрепленный на основании и включающий:
- лазерный модуль,
- первые двухкоординатные направляющие, обращенные к образцу и закрепленные на лазерном модуле,
- лазер, мобильно установленный на первых двухкоординатных направляющих и могущий быть оптически сопряженным с зоной измерения образца,
- приемный модуль,
- вторые двухкоординатные направляющие, обращенные к образцу и закрепленные на приемном модуле,
- фотоприемник, мобильно установленный на вторых двухкоординатных направляющих и могущий быть оптически сопряженным с зоной измерения образца.
Существует также вариант изобретения, в котором в многофункциональном сканирующем зондовом микроскопе платформа содержит:
- первый двухкоординатный стол, связующий блок предварительного сближения с основанием,
- второй двухкоординатный стол, и
- оптический микроскоп, закрепленный на втором двухкоординатном столе. Существует также вариант изобретения, в котором платформа содержит упоры с подвижными винтами. При этом первая и вторая измерительные головки адаптированы:
- линейно перемещаться по первой и второй направляющим соответственно до упоров, и/или
- радиально перемещаться относительно первой и второй направляющих соответственно.
Существует также вариант изобретения, в котором многофункциональный сканирующий зондовый микроскоп содержит:
- жидкостной модуль,
- резервуар с жидкостью,
- ловитель,
при этом:
- ловитель установлен на платформе,
- жидкостной модуль ориентированно установлен на ловителе,
- резервуар с жидкостью закреплен на держателе объекта и сопряжен с анализатором.
Существует также вариант изобретения, в котором многофункциональный сканирующий зондовый микроскоп содержит модуль измерения твердости, ориентированно установленный на ловителе.
Существует также вариант изобретения, в котором в многофункциональном сканирующем зондовом микроскопе первая и вторая измерительные головки, одновременно установленные на первых и вторых направляющих соответственно, являются головками по меньшей мере одного из указанных ниже типов: (а) туннельная головка, в которой зонд выполнен в виде иглы, а держатель зонда выполнен в виде захвата иглы; (б) атомно-силовая головка, в которой зонд выполнен в виде кантилевера, а держатель зонда в виде захвата кантилевера.
Существует также вариант изобретения, в котором многофункциональный сканирующий зондовый микроскоп содержит:
- блок нагрева,
- термопара,
- бесконтактный измеритель температуры, при этом:
- блок нагрева установлен на держателе объекта,
- термопара закреплена на блоке нагрева,
- бесконтактный измеритель температуры оптически сопряжен с образцом.
Существует также вариант изобретения, в котором в многофункциональный сканирующий зондовый микроскоп введен точный захват иглы, содержащий:
- кронштейн с V-образной канавкой, удлиненной вдоль центральной направляющей и представляющей микронеровности предопределенного первого размера,
- винт, удлиненный вдоль продольной оси, установленный в кронштейне и сопряженный с V-образной канавкой.
Существует также вариант изобретения, в котором винт имеет правую резьбу и продольная ось винта смещена относительно центральной направляющей V-образной канавки.
В качестве альтернативного существует также вариант изобретения, в котором винт имеет левую резьбу и продольная ось винта смещена относительно центральной направляющей V-образной канавки.
Существует также вариант изобретения, в котором винт содержит торец, краевая поверхность которого представляет микронеровности предопределенного второго размера большего по сравнению с первым размером микронеровностей V-образной канавки.
В качестве альтернативного существует также вариант изобретения, в котором винт содержит торец, краевая поверхность которого представляет микронеровности предопределенного второго размера меньшего по сравнению с первым размером микронеровностей V-образной канавки.
Существует также вариант изобретения, в котором в многофункциональный сканирующий зондовый микроскоп введен первый точный захват кантилевера, содержащий:
- первую опору,
- вторую опору со скосом,
- первую пластину,
- пружинный элемент,
при этом:
- первая опора, вторая опора со скосом и пружинный элемент закреплены на первой пластине и адаптированы взаимодействовать с кантилевером,
- пружинный элемент установлен напротив первой опоры.
Существует также вариант изобретения, в котором в многофункциональный сканирующий зондовый микроскоп введен второй точный захват кантилевера, содержащий:
- третью опору,
- четвертую опору со скосом,
- вторую пластину,
- эксцентрик с упругим элементом,
при этом:
- третья опора, четвертая опора со скосом и эксцентрик с упругим элементом закреплены на второй пластине и адаптированы взаимодействовать с кантилевером,
- эксцентрик установлен на второй пластине напротив четвертой опоры со скосом.
Существует также вариант изобретения, в котором в многофункциональном сканирующем зондовом микроскопе первая и вторая измерительные головки содержат механизированные приводы.
Другие отличительные признаки и преимущества изобретения вытекают из описания, приведенного ниже для иллюстрации сущности изобретения и не являющегося ограничительным для последнего, со ссылками на прилагаемые фигуры 1-14.
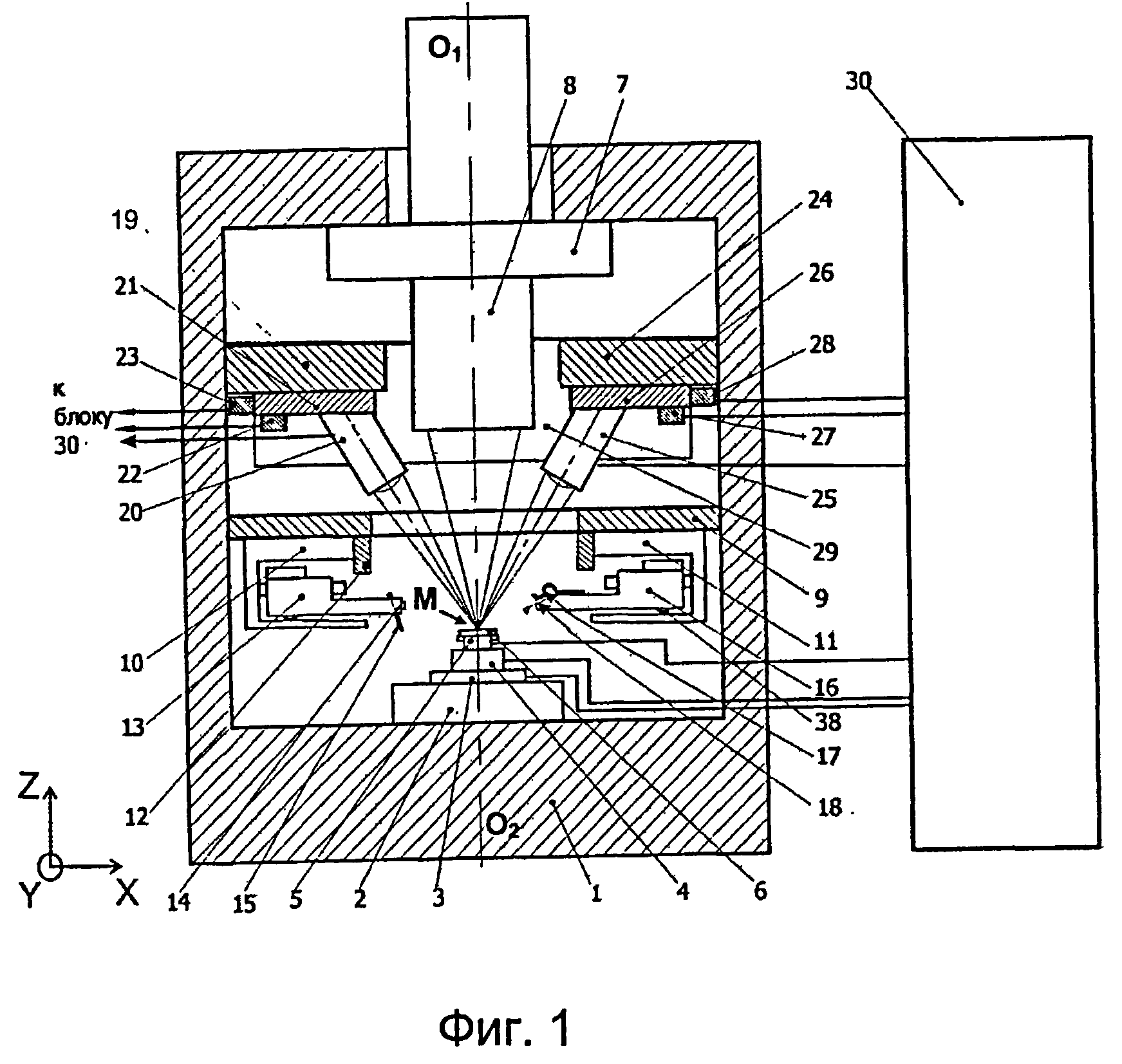
На фигуре 1 схематично изображен упрощенный основной вид с частичным разрезом многофункционального сканирующего зондового микроскопа по одной из версии изобретения.
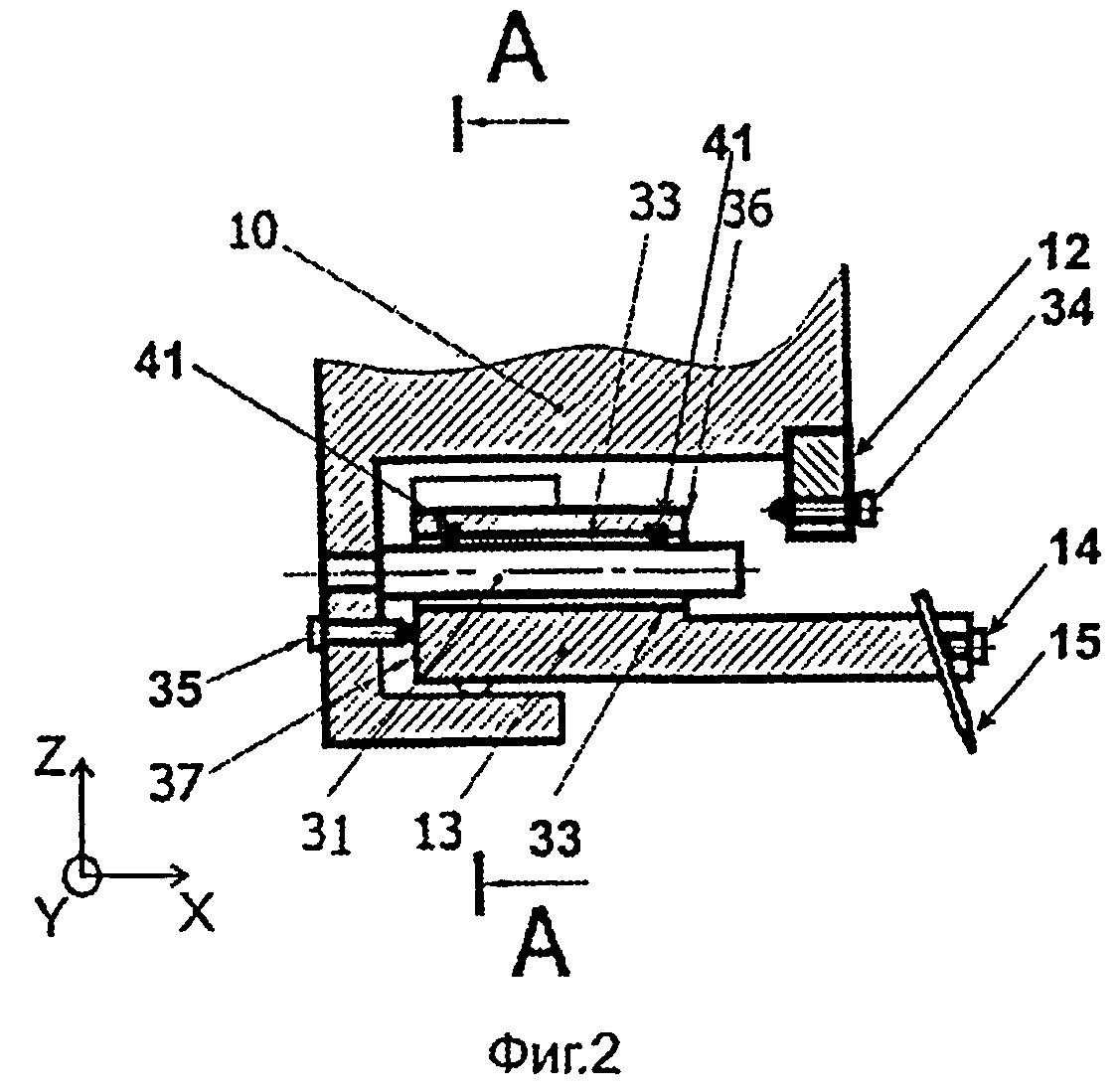
На фигуре 2 схематично изображен упрощенный основной вид в разрезе первой направляющей с первой измерительной головкой по одной из версии изобретения.
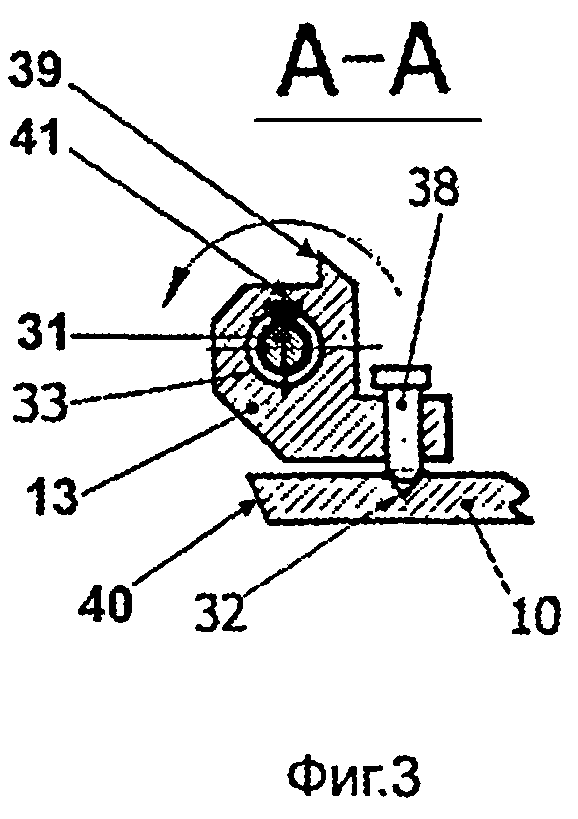
На фигуре 3 схематично изображено сечение в плоскости А-А первой направляющей с первой измерительной головкой по фигуре 2.
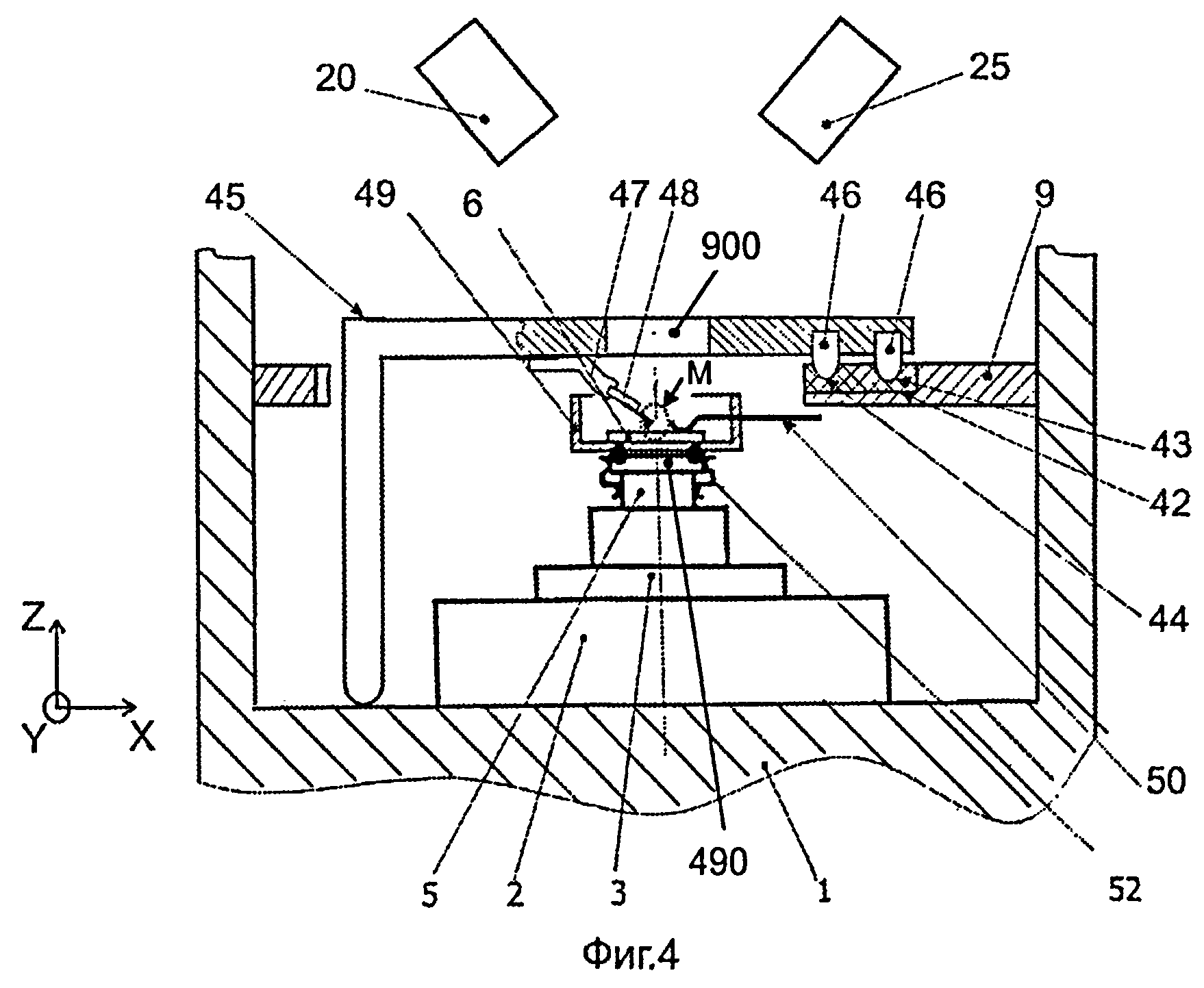
На фигуре 4 схематично изображен упрощенный основной вид с частичным разрезом одного из вариантов ловителя с жидкостным модулем.
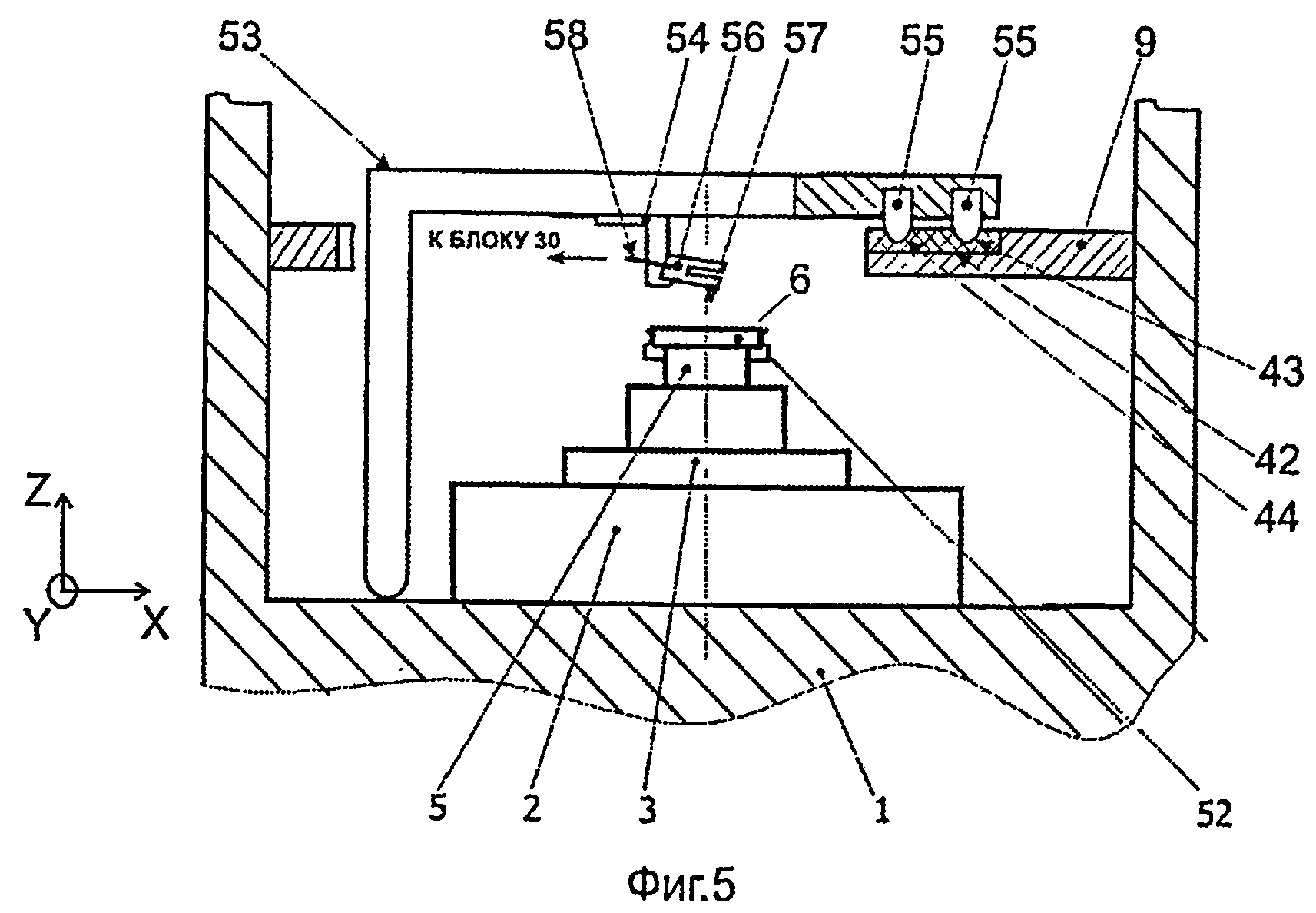
На фигуре 5 схематично изображен упрощенный основной вид с частичным разрезом одного из вариантов ловителя с модулем измерения твердости.
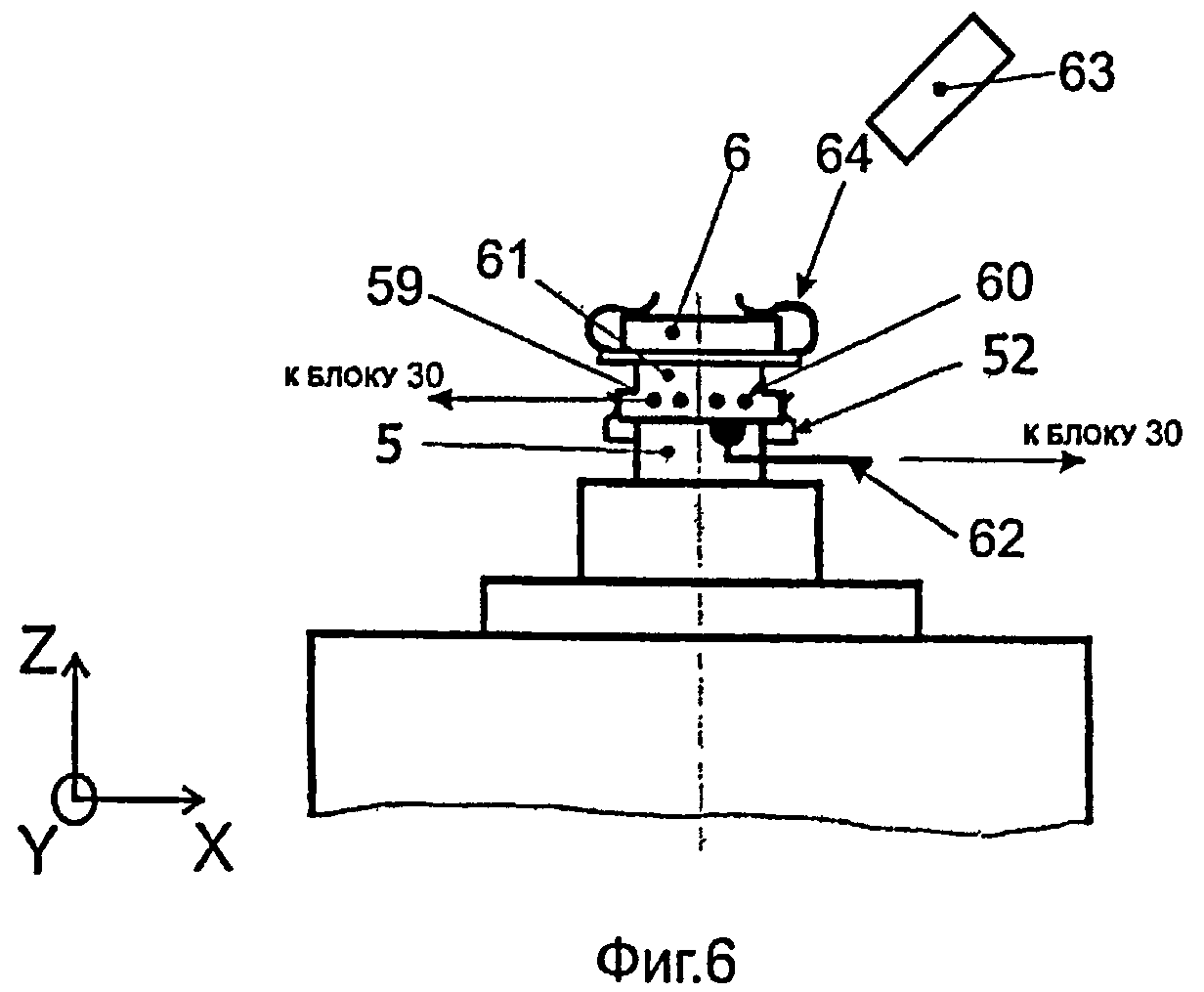
На фигуре 6 схематично изображен основной вид блока нагрева по одной из версии изобретения с образцом, закрепленным на держателе объекта.
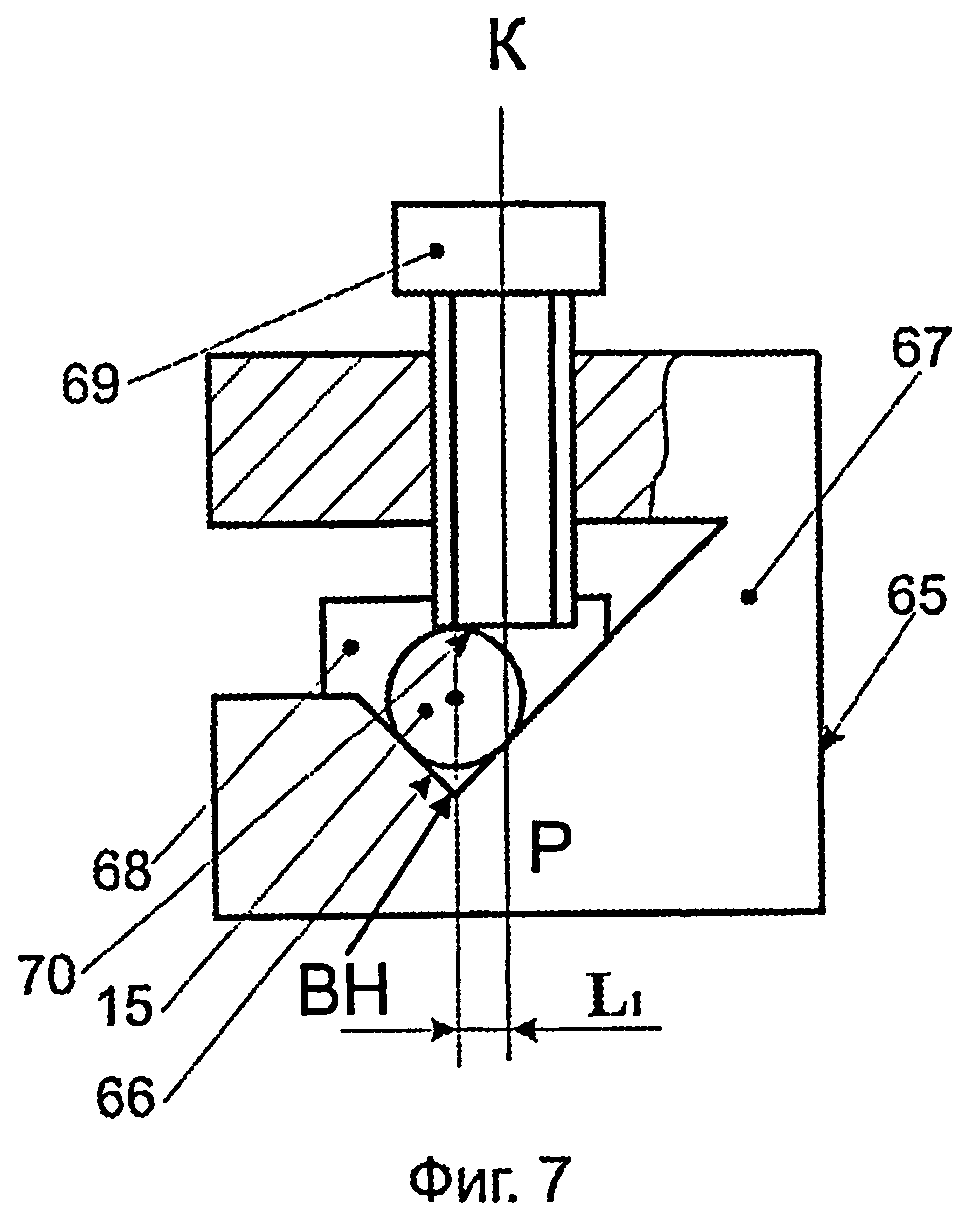
На фигуре 7 схематично изображен вариант одного из вариантов точного захвата иглы, вид со стороны ее острия с частичным разрезом.
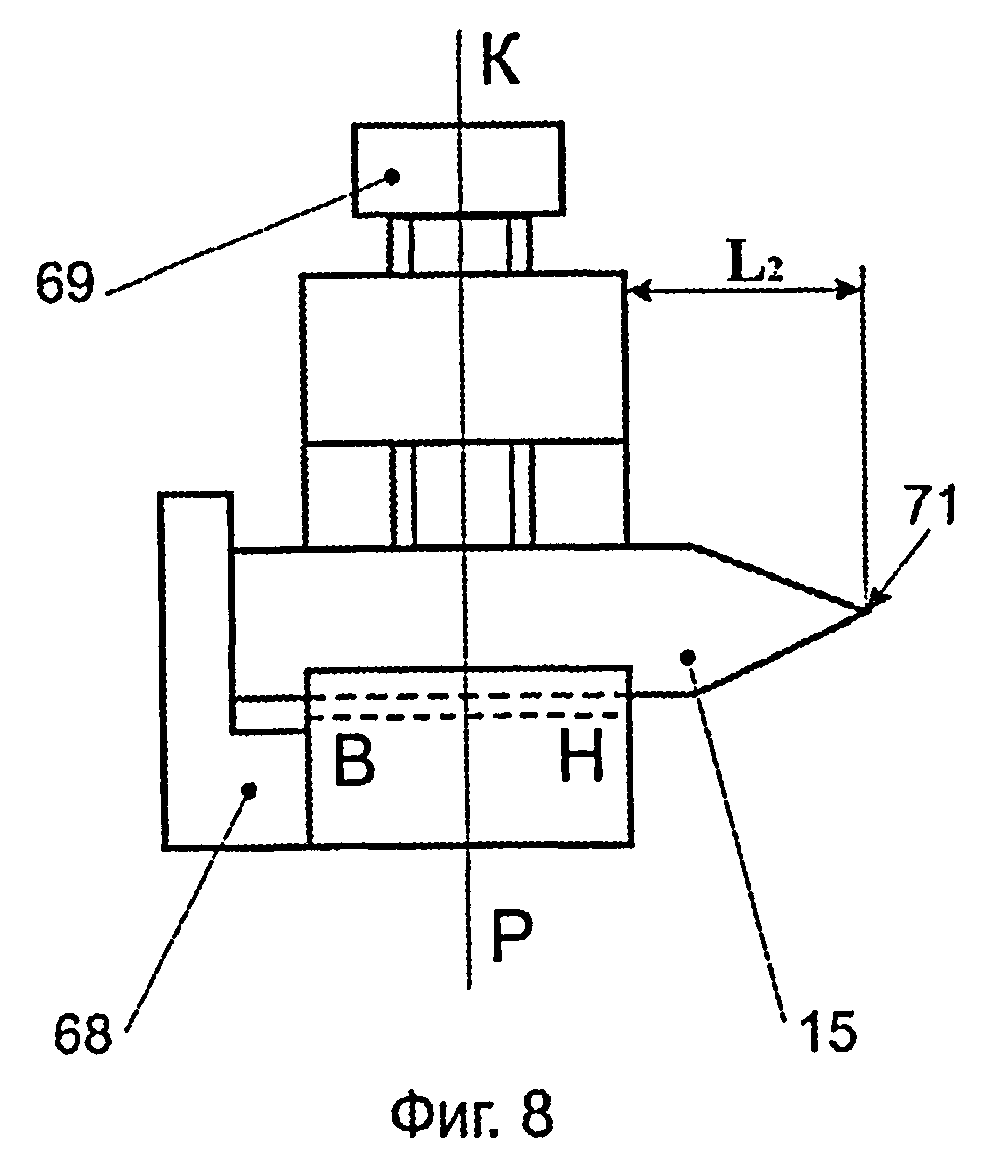
На фигуре 8 схематично изображен вид сбоку точного захвата иглы по фигуре 2.
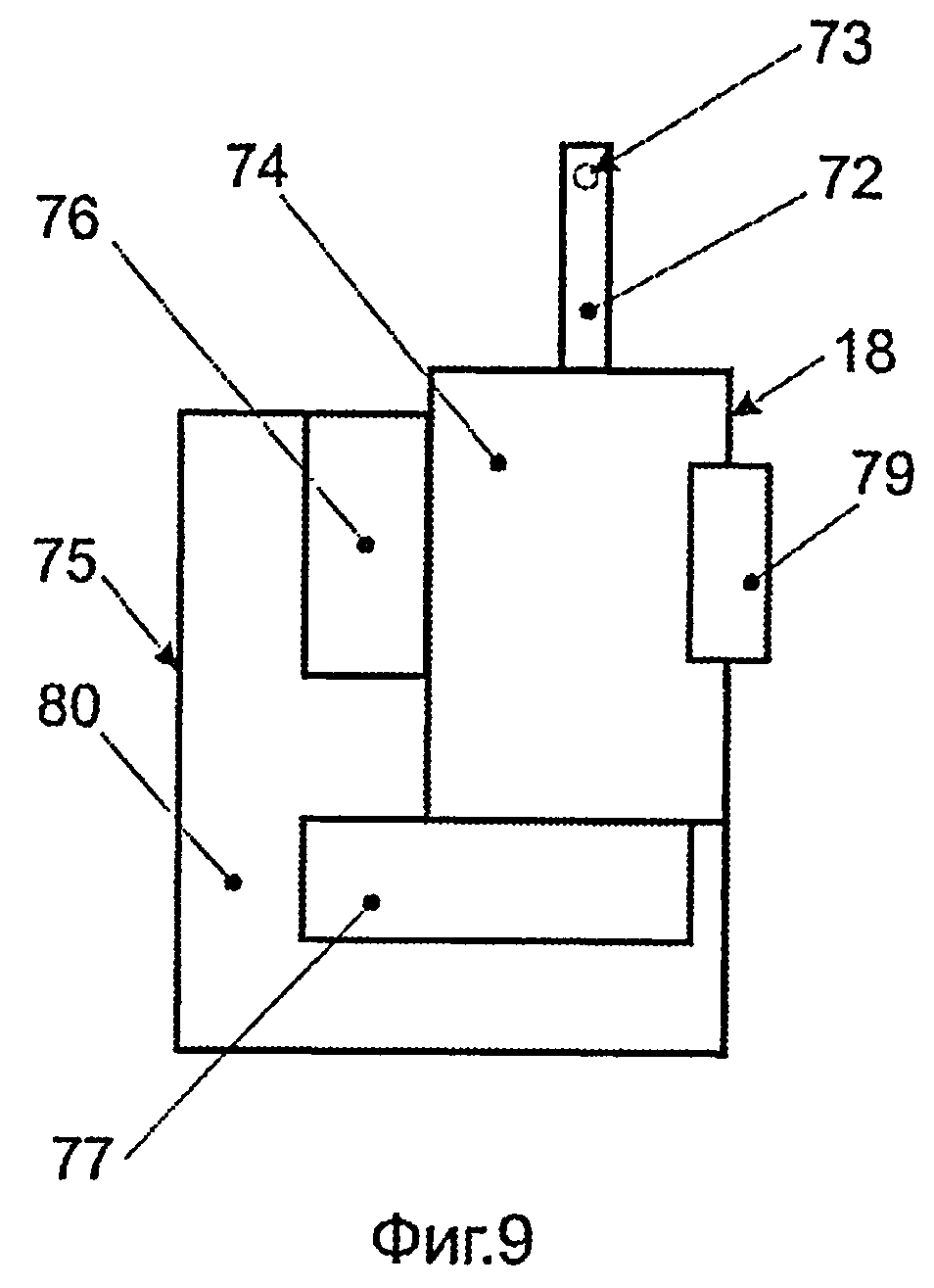
На фигуре 9 схематично изображен первый вариант (пружинный) первого точного захвата кантилевера, вид со стороны платформы.
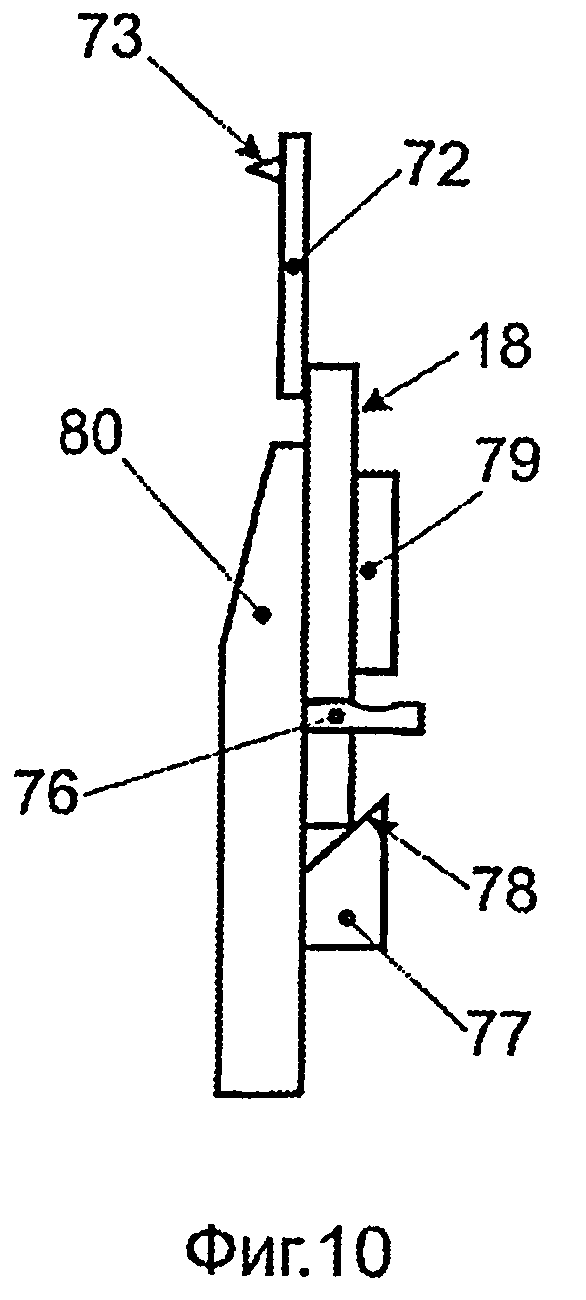
На фигуре 10 схематично изображен вид сбоку первого точного захвата кантилевера по фигуре 9.
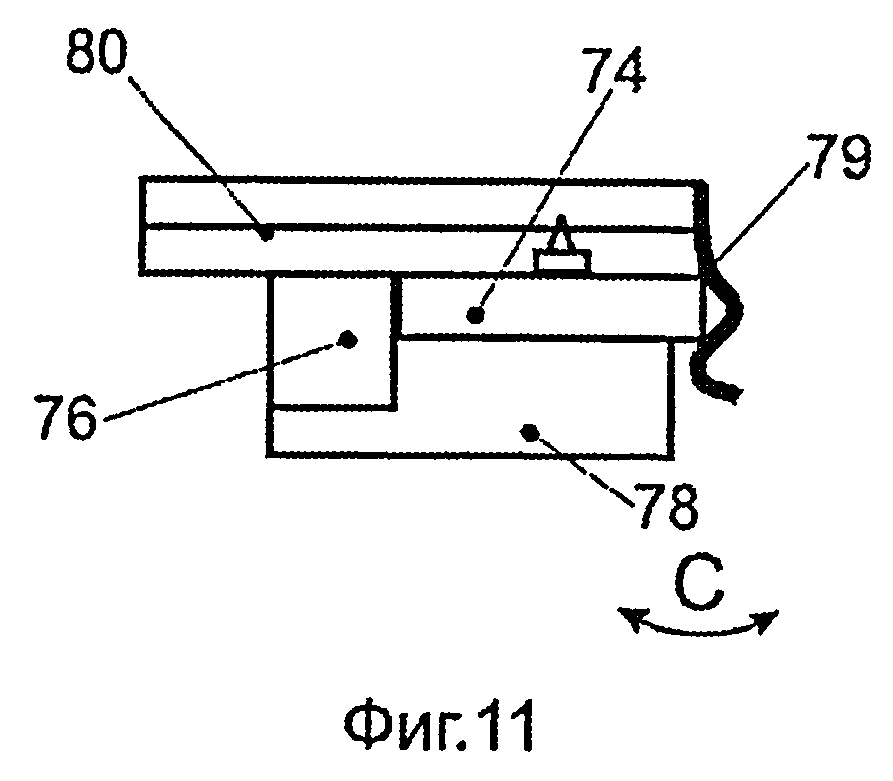
На фигуре 11 схематично изображен вид сверху первого точного захвата кантилевера по фигуре 9.
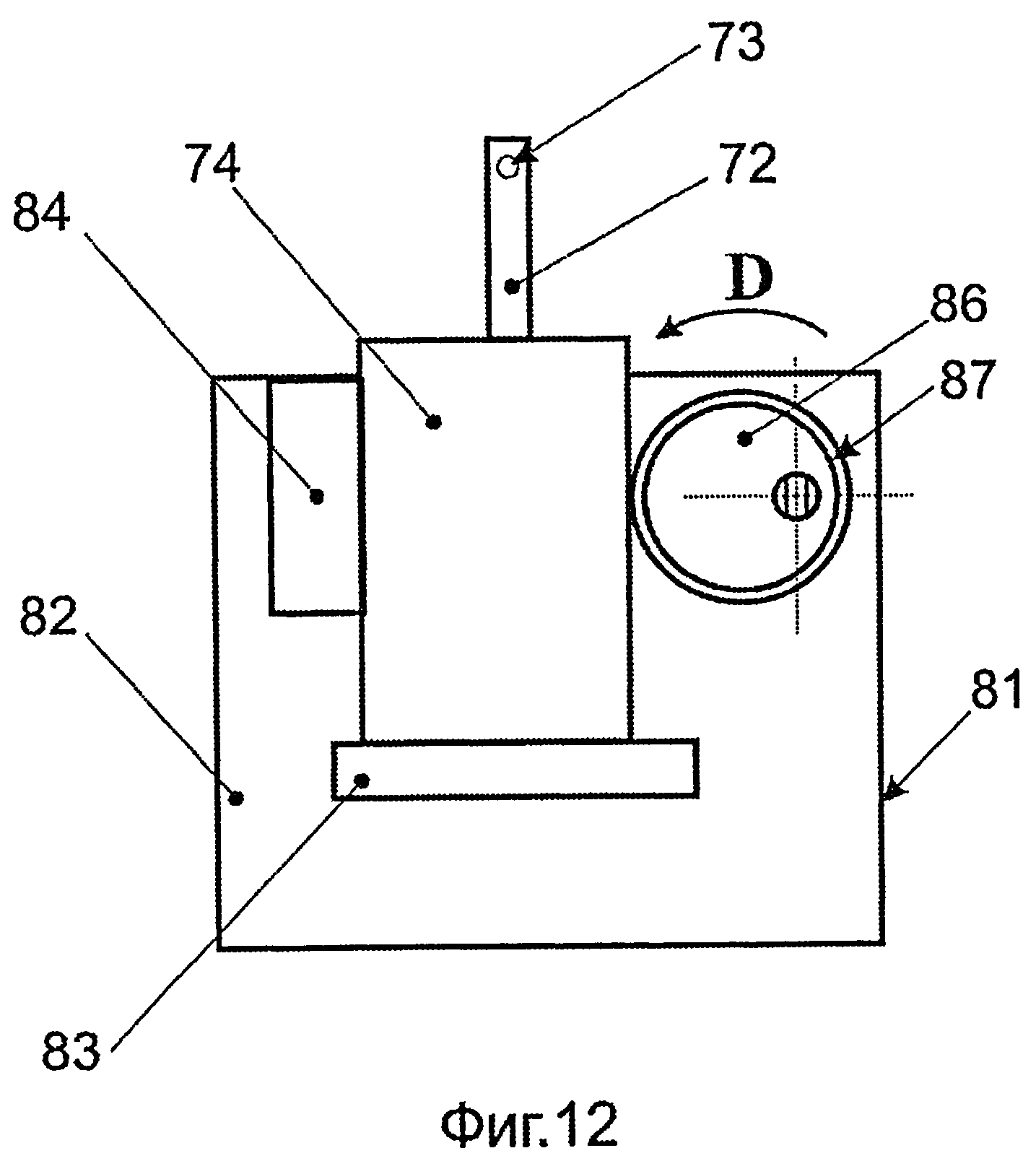
На фигуре 12 схематично изображен второй вариант (эксцентриковый) второго точного захвата кантилевера, вид со стороны платформы.
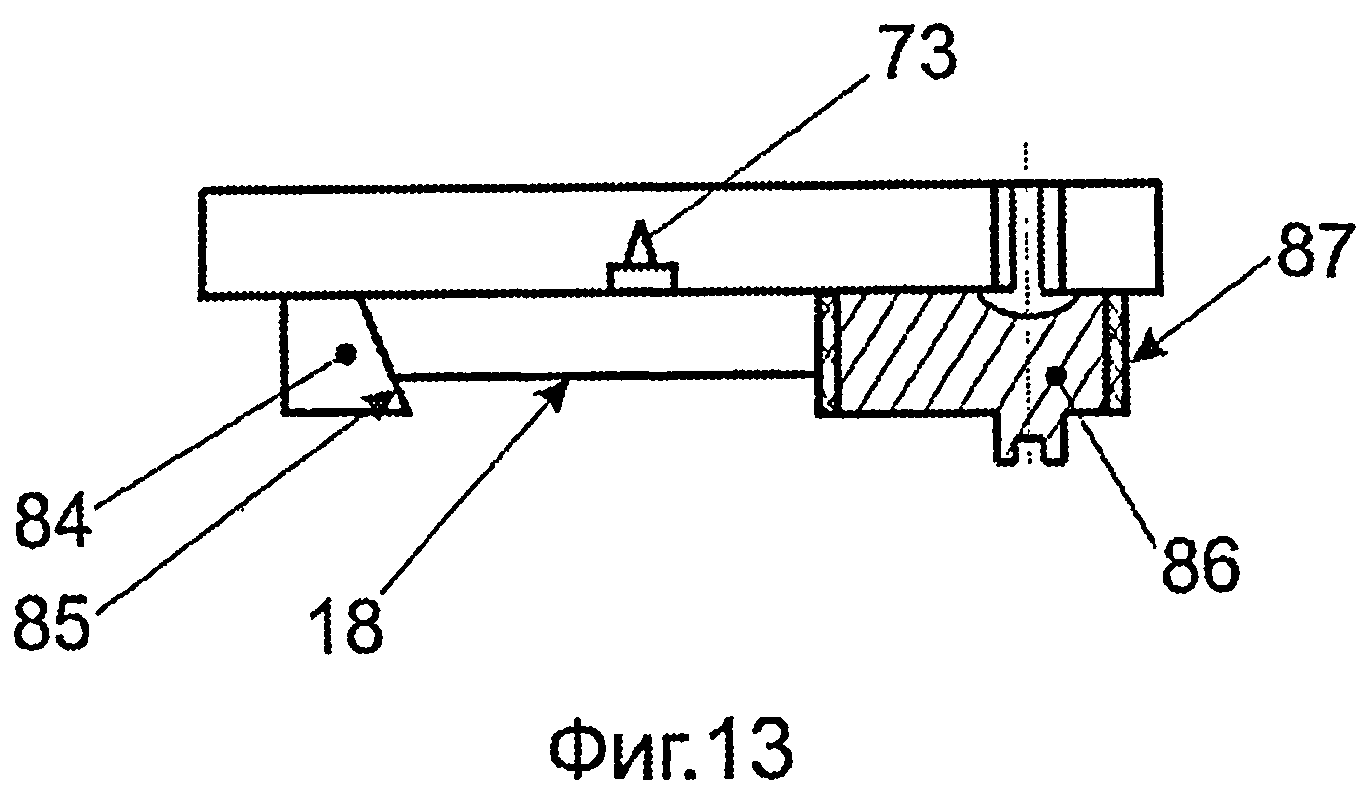
На фигуре 13 схематично изображен вид сверху с частичным разрезом второго точного захвата кантилевера по фигуре 12.
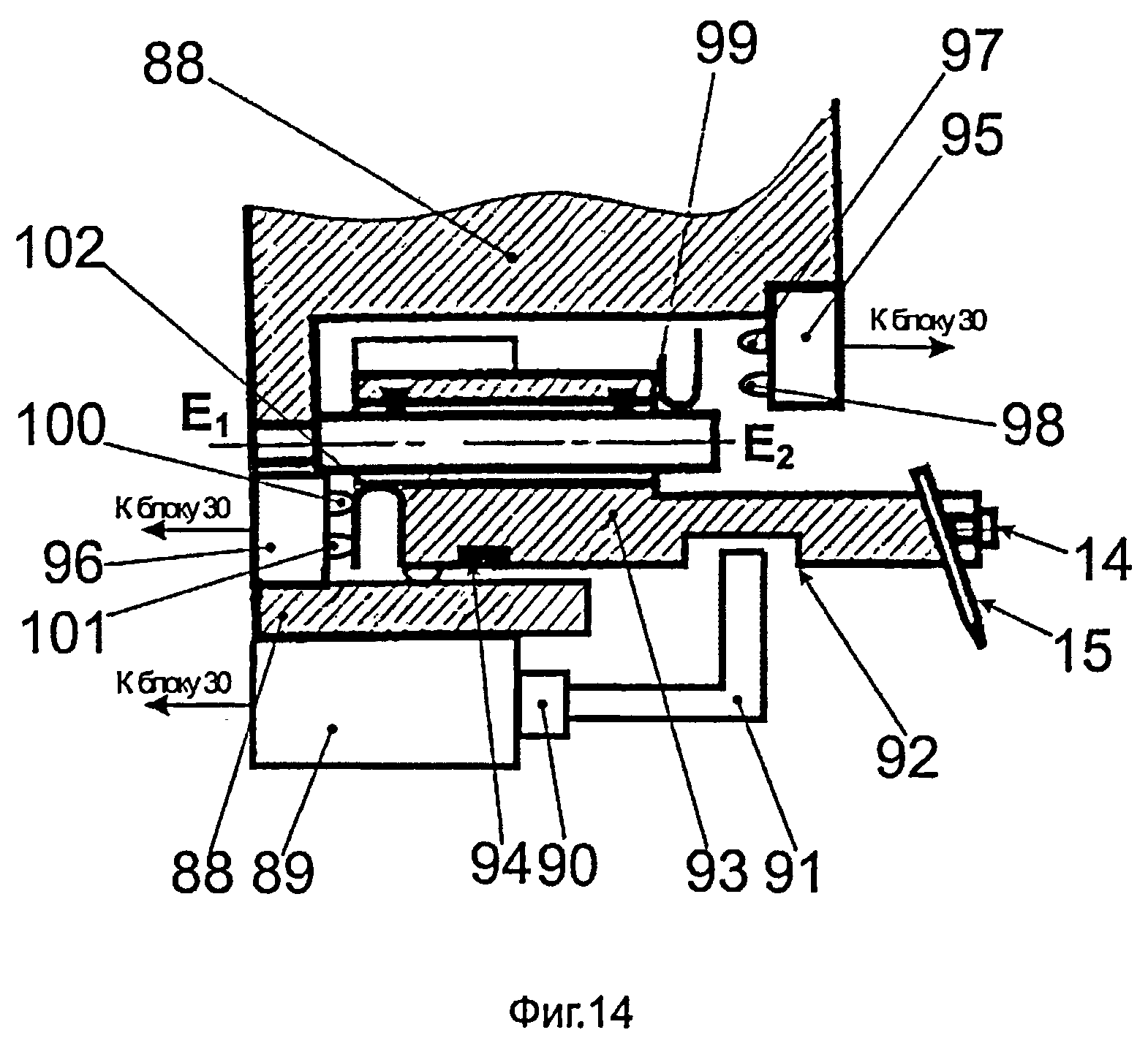
На фигуре 14 схематично изображен упрощенный основной вид с частичным разрезом моторизованного варианта измерительных головок.
Как упомянуто выше и проиллюстрировано на фигурах 1-14, изобретение имеет отношение к многофункциональным сканирующим зондовым микроскопам, сокращенно «СЗМ», предназначенным для исследования образцов в различных режимах.
Многофункциональный сканирующий зондовый микроскоп, изображенный на фигуре 1, содержит основание 1, на котором установлен первый двухкоординатный (расположенный в плоскости ХУ на фигуре 1) стол 2. Этот стол 2 может иметь ручную подвижку, пьезоинерционный привод или электромеханический двигатель, например, шаговый, двигатель. Первый двухкоординатный стол 2 может содержать две подвижные каретки, установленные одна на другой, с направляющими качения, скольжения или упругие направляющие на плоских пружинах. Чаще других для уменьшения люфтов в соединениях используются направляющие скольжения. Одни направляющие скольжения расположены на нижнем основании первого двухкоординатного стола 2 (например, V-образная канавка и плоскость). По этим направляющим скользят, например, шарики, закрепленные в одной подвижной каретке, на которой имеются другие направляющие, на которых установлена другая подвижная каретка с шариками (на фигуре 1 детальное изображение первого двухкоординатного стола 2 не показано). Для подвижек кареток в данной конструкции целесообразно использовать стандартные шаговые двигатели. Диапазон перемещения первого двухкоординатного стола 2 может, например, на 10-2 М превышать размеры образца. В отдельных случаях на первом двухкоординатном столе 2 может быть установлена поворотная каретка для поворота образца в плоскости ХУ. На первом двухкоординатном столе 2 закреплен блок предварительного сближения 3, содержащий пьезосканер 4. На пьезосканере 4 установлен держатель объекта 5.
На держателе объекта 5 может быть расположен образец 6, содержащий по меньшей мере одну зону измерений М. Средства фиксации образца 6 на держатель 5 могут быть различными. Чаще используются пружинные прижимные лапки. Но может применяться клей или двухсторонняя липкая пленка. При этом одна сторона липкой ленты приклеивается к держателю объекта 5, а другая к образцу 6 (не показано). Возможно, использование носителей (не показаны) образцов 6, на которые образцы 6 закрепляют тем же клеем или пружинными лапками, а потом носитель с образцом 6 устанавливают на держателе объекта 5. Этот вариант может применяться в том случае, если образцы сложно брать пинцетом, (например, из-за малых размеров образцов 6) и оперативно устанавливать на держатель объекта 5. Носители же образцов 6 могут иметь удобные захваты для пинцета, либо быть магнитными для магнитной фиксации на держателе объекта 5. При этом держатель объекта 5 может содержать магнит, либо сам быть изготовлен из магнитного материала.
Блок предварительного сближения 3 и пьезосканер 4 являются основными электромеханическими узлами зондовой микроскопии. В качестве пьезосканеров обычно используют пьезокерамические секционированные трубки, либо пакеты из спеченных пьезокерамических пластин, обеспечивающие X, Y, Z (например, ортогональные) перемещения. Чаще других применяются пьезокерамические секционированные трубки (на чертежах не показаны). Их характерные размеры: длина 3*10-1 м, наружный диаметр 10-2 м, внутренний диаметр 9*10-2 м. Часть трубки по длине покрыта сплошными электродами (снаружи и изнутри трубки), при подаче напряжения на которые трубка либо удлиняется, либо укорачивается.
Другая часть трубки имеет четыре электрода на наружной поверхности и четыре электрода на внутренней поверхности трубки, расположенные друг напротив друга. При подаче напряжений на них можно управлять размерами фрагментов пьезокерамических трубок и их изгибать. Таким образом, осуществляется перемещение торца пьезокерамической секционированной трубки с держателем объекта 5 по координатам X, Y, Z. Блок предварительного сближения 3 может быть изготовлен на основе инерционных приводов, дифференциальных приводов и т.п. В данном случае наиболее эффективным будет механический привод с шаговым двигателем и винтовой передачей на каретку, установленную на направляющих (не показано). При этом шаговый двигатель с винтом будет установлен на первом двухкоординатном столе 2. На нем же закрепляют направляющую, по которой может скользить поджатая к ней, например, пружиной, каретка с гайкой. Этот привод подобен одному из приводов первого двухкоординатного стола 2. Минимальный шаг сближения должен быть менее 10-6 м, чтобы в процессе подвода пьезосканер 4 успел отработать сближение в обратном направлении и не произошла поломка зонда.
Следует заметить, что основание 1 на фигуре 1 изображено схематично. Оно может состоять из двух разъемных элементов (нижней плиты и крышки), содержать отверстия для установки образца и другого оборудования. К сущности изобретения эти разъемные элементы не имеют отношения, поэтому на чертежах не показаны.
На основании 1 посредством второго двухкоординатного (расположенного в плоскости XY на фигуре 1) стола 7 установлен оптический микроскоп 8. Как показано на фигуре 1, оптическая ось O1O2 оптического микроскопа 8 перпендикулярна образцу 6 и проходит через его зону измерений М. Второй двухкоординатный стол 7 может быть аналогичен описанному выше первому двухкоординатному столу 2. На основании 1 напротив образца 6 закреплена платформа 9, содержащая со стороны образца 6 первую 10 и вторую 11 направляющие, а также два упора 12. Платформа 9 может быть жестко закреплена на основании 1, например, сваркой или винтами (не показано). Как показано на фигуре 1, платформа 9 содержит рабочее отверстие 900, позволяющее оптическое сопряжение оптического микроскопа 8 с образцом 6. На первой направляющей 10 установлена первая измерительная головка 13 с захватом 14 первого зонда, выполненного, например, в виде иглы 15 для туннельных измерений. В данном случае захват 14 первого зонда будет называться захватом 14 иглы 15. Первая измерительная головка 13 обращена к образцу 6 и адаптирована для зондирования зоны измерения М образца 6. На второй направляющей 11 установлена вторая измерительная головка 16 с захватом 17 второго зонда, выполненного, например, в виде кантилевера 18 для атомно-силовых измерений. В данном случае захват 17 второго зонда будет называться захватом 17 кантилевера 18. Вторая измерительная головка 16 обращена к образцу 6 и адаптирована для зондирования зоны измерения М образца 6. В простейшем случае захват 14 иглы 15 может быть выполнен в виде прижимного винта, а захват 17 кантилевера 18 в виде пружины. Первая 13 и вторая 16 измерительные головки представляют собой анализатор. Использование второго двухкоординатного стола 7, а также первой 13 и второй 16 измерительных головок, соответственно мобильно установленных на первой 10 и второй 11 направляющих и сопряженных с упорами 12 позволяет оперативно менять режимы измерения и зону измерения М образца 6, что расширяет функциональные возможности СЗМ.
На основании 1 закреплен лазерный модуль 19, содержащий со стороны платформы 9 лазер 20, мобильно установленный на первых двухкоординатных направляющих 21 и сопряженный с первым 22 и вторым 23 приводами. На основании 1 закреплен приемный модуль 24, содержащий фотоприемник 25, мобильно установленный на вторых двухкоординатных направляющих 26 и сопряженный с третьим 27 и четвертым 28 приводами. Такое выполнение позволяет проводить оперативную настройку (оптическое сопряжение через рабочее отверстие 900 платформы 9):
- луча лазера 20 на зону измерения М образца 6 и, в особенности, на кантилевер 18, находящийся в зоне измерений М, и
- фотоприемника 25 на лазерный луч, отраженный от зоны измерений М образца 6 и, в особенности, от кантилевера 18, находящегося в зоне измерений М, после смены режимов работы.
Это расширяет функциональные возможности устройства. Лазерный модуль 19 и приемный модуль 24 представляют собой оптический блок 29.
Жесткое закрепление лазерного модуля 19 и приемного модуля 24 на основании 1 может быть осуществлено с помощью винтов, которые с целью упрощения чертежей не показаны. Также могут быть закреплены на основании 1 первый 2 и второй 7 двухкоординатные столы. Первые двухкоординатные направляющие 21 и вторые двухкоординатные направляющие 26 на фигуре 1, соответственно обращенные к платформе 9 и, следовательно, к образцу 6, показаны условно. Они могут быть выполнены в виде двух самостоятельных кареток, установленных одна на другую и сопряженных соответственно:
- одна, - с первым 22 и вторым 23 приводами,
- другая, - с третьим 27 и четвертым 28 приводами.
Первые двухкоординатные направляющие 21 с первым 22 и вторым 23 приводами, с одной стороны, и вторые двухкоординатные направляющие 26 с третьим 27 и четвертым 28 приводами, с другой стороны, могут быть аналогичны первому 2 и второму 7 двухкоординатным столам.
В качестве лазера 20 можно использовать гелий-неоновый лазер с длиной волны равной 0.6328*10-6 м, а в качестве фотоприемника 25, - фотоприемник с диапазоном приема, включающим эту волну. Также могут использоваться инфракрасные лазеры, инфракрасные фото- и световоды, что улучшит процесс наблюдения зоны перемещения за счет устранения ее паразитной засветки в видимой глазом оператора области спектра.
Лазер 20 и фотоприемник 25 могут быть оптически сопряжены (через рабочее отверстие 900 платформы 9) соответственно с первой 13 и второй 16 измерительными головками в зоне измерения М, а более конкретно с их зондами, т.е. с иглой 15 и с кантилевером 18 соответственно. Оптическое сопряжение иглы 15 с лазером 20 может выполнять вспомогательную роль, например, для дополнительной подсветки зоны измерения.
Первая 13 и вторая 16 измерительные головки, могут быть одновременно установлены на первых 10 и вторых 11 направляющих соответственно. При этом обе измерительных головки (и первая 13, и вторая 16) могут быть одного типа, например, обе быть туннельными головками (на чертежах не показаны), или обе быть атомно-силовыми головками (на чертежах не показаны). Благодаря этому обе измерительных головки (и первая 13, и вторая 16), - взаимозаменяемы. Это позволяет при поломке (например, при затуплении иглы 15 в тоннельном режиме) во время измерений, например, первой измерительной головки 13, не тратить время на ее замену. Достаточно отвести ее в сторону от образца 6, затем приблизить к образцу 6 вторую измерительную головку 16 и сразу после этого продолжить прерванные измерения в том же режиме. Возможность минимизировать время, потерянное из-за выхода из строя первой измерительной головки 13, и продолжить измерения в том же режиме практически без задержки, особенно важна в случае, когда характеристики образца 6 быстро меняются во времени. Это расширяет функциональные возможности СЗМ.
В качестве альтернативного варианта, одна из измерительных головок (например, первая 13, как показано на фигуре 1) может быть туннельной головкой, а другая (например, вторая 16, как показано на фигуре 1) может быть атомно-сиповой. Благодаря этому возможно быстро менять туннельный режим измерений образца 6 на атомно-силовой и обратно, чередуя таким образом один режим измерений с другим режимом измерений. Это расширяет функциональные возможности СЗМ,
Исполнительные элементы, пронумерованные на чертежах 3, 4, 5, 22, 23, 27, 28, 29 и описанные выше, подключены к блоку управления 30 (контроллеру). К блоку управления 30 могут быть также подключены первый 2 и второй 7 координатные столы, а более конкретно их шаговые двигатели, а также кантилевер 18. Кроме этого к блоку управления 30 подключают иглу 15. С целью упрощения чертежей эти соединения на фигуре 1 не показаны. Контроллер 30 обеспечивает стандартные функции сканирующих зондовых микроскопов. Он может включать два аналого-цифровых преобразователя, сокращенно АЦП, усилители отклонения пьезосканера с цифро-аналоговым преобразователем, сокращенно ЦАП, и высоковольтным усилителем, цепь обратной связи с усилителями и интегратором, мультиплексоры, коммутирующие сигналы, входные усилители, фильтры сигналов, преобразователи сигналов, блок управления приводом с двумя ЦАПами, блок управления шаговыми двигателями и стабилизатор температуры.
Первая направляющая 10 (фигуры 1-3) и вторая направляющие 11 (фигура 1) могут содержать цилиндрические штоки 31, а также V-образные направляющие 32. Первая измерительная головка 13 (фигуры 1-3) и вторая измерительная головка 16 при этом могут иметь цилиндрические образующие 33. На первой 10 и второй 11 направляющих упоры 12 могут содержать первые винты 34, имеющие установочные подвижки по координате Х и взаимодействующие с первыми поверхностями 36. После осуществления установочной подвижки первый винт 34 может быть зафиксирован контр-гайкой (не показана). Вторые винты 35 могут взаимодействовать с вторыми поверхностями 37. Третьи винты 38 установлены на первой 13 и второй 16 измерительных головках (фигура 1) и находятся во взаимодействии с V-образными направляющими 32. Трущиеся пары в первой 10 и второй 11 направляющих могут быть выполнены парами следующих материалов: сталь-латунь, сталь-бронза, сталь-сталь, поликор-сталь или поликор-бронза. Первая 13 и вторая 16 измерительные головки выполнены откидными. Таким образом они могут вращаться (относительно первой 10 и второй 11 направляющих соответственно) по цилиндрическим штокам 31 до упора выступов 39 в торцы 40 (фигура 3). Это позволяет осуществлять оперативную смену (загрузку) зондов (вне зоны измерения) и соответственно быстро и просто менять режимы работы. Для уменьшения люфтов в головках 13 и 16 могут быть закреплены фрикционные вкладыши 41, выполненные, например, из фторопласта или капролона.
Помимо первой 10 и второй 11 направляющих на платформе 9 может быть расположен ловитель 42 (фигура 4), включающий сферическую канавку 43 и U-образную канавку 44, вытянутую по координате Y (на фигуре 1 ловитель 42 не показан). В ловитель 42 установлен жидкостной модуль 45 посредством шаровых опор 46.
Жидкостной модуль 45 включает в себя захват 47 третьего зонда. Третий зонд выполнен, например, в виде кантилевера 48 для жидкостных измерений, оптически сопряженного с лазером 20 и фотоприемником 25. Кантилевер 48 для жидкостных измерений может быть вклеен в захват 47 третьего зонда.
На держателе объекта 5 в этом случае будет закреплен резервуар 49 с жидкостью, в котором посредством прижимной лапки 50 установлен образец 6 (фигура 4). Резервуар 49 с жидкостью оптически сопряжен с анализатором и, как следствие, с лазером 20 и фотоприемником 25. Резервуар 49 может быть выполнен из кварца или фторопласта. Для закрепления резервуара 49 на держателе 5 могут использоваться первые пружинные лапки 52, клеевая пленка или магнит в дне резервуара (не показано). Нижняя обращенная к держателю 5 часть резервуара 49 может содержать металлическое основание 490, например, приклеенное к резервуару 49 со стороны держателя 5. Это металлическое основание 490 адаптировано для контакта непосредственно с первыми пружинными лапками 52 (фигура 4). Эти же первые пружинные лапки 52 могут использоваться для закрепления образца 6 по фигуре 1.
На фигуре 4 ловитель 42 показан условно. Шаровые опоры 46 могут быть смещены по координате Y друг относительно друга. Ловитель 42 может быть также расположен и на основании 1, а шаровые опоры в нижней части жидкостного модуля 45 (не показано).
Благодаря координатно ориентированной установки жидкостного модуля 45, СЗМ адаптирован для проведения жидкостных или электрохимических измерений, что расширяет его функциональные возможности.
На платформе 9 (фигура 5) в качестве альтернативы жидкостному модулю 45 на том же ловителе 42 может быть установлен модуль измерения твердости 53 с захватом 54 четвертого зонда и шаровыми опорами 55.
В качестве четвертого зонда измерения твердости может быть использован кварцевый резонатор 56 с иглой 57. Это также расширяет функциональные возможности устройства. Крепление кварцевого резонатора 56 в захвате 54 может быть осуществлено, например, клеем. Выходы 58 кварцевого резонатора 56 подключены к блоку управления 30.
Установку жидкостного модуля 45 и модуля измерения твердости 53 на платформу 9 осуществляют в альтернативном порядке при разведенных в разные стороны первой 13 и второй 16 измерительных головках (фигура 1). С целью упрощения чертежей на фигурах 4-5 первая 10 и вторая 11 направляющие, а также первая 13 и вторая 16 головки не показаны.
В одном из вариантов реализации изобретения на держателе объекта 5 закрепляют блок нагрева 59 (фигура 6) с образцом 6. Блок нагрева 59 в качестве нагревателя может содержать, например, металлическую (в частности, нихромовую) спираль 60, впеченную в подложку 61 из изолирующего материала (например, керамики). Подложка 61 сопряжена с термопарой 62. Термопара 62 адаптирована для измерения температуры подложки 61. Термопара 62 электрически изолирована относительно держателя объекта 5 и блока нагрева 59 (на фигуре 6 не показано). В качестве альтернативного варианта можно использовать бесконтактный измеритель температуры 63 (оптический пирометр или инфракрасный термометр) для измерения температуры подложки 6 с ее рабочей (т.е. обращенной к первой 13 и второй 16 измерительным головкам) стороны, что повышает точность измерения и расширяет функциональные возможности прибора. Бесконтактный измеритель температуры 63 может располагаться вне основания 1 и быть оптически сопряженным с образцом 6 через оптически прозрачное окно, расположенное в основании 1 (не показано).
Образец 6 на блоке нагрева 59 может быть закреплен вторыми пружинными лапками 64. Следует заметить, что блок нагрева 59 выполнен быстросъемным и может применяться при всех режимах измерения, что также расширяет функциональные возможности СЗМ.
Оперативное закрепление блока нагрева 59 на держателе объекта 5 может быть осуществлено с использованием первых пружинных лапок 52.
В одном из вариантов (фигуры 7-8) можно использовать координатно ориентированную установку иглы 15 в точный захват 65 иглы 15. Точный захват 65 иглы 15 содержит:
- кронштейн 67 с V-образной канавкой 66, удлиненной вдоль центральной направляющей ВН и представляющей микронеровности (в частности, высоту микронеровностей измеряемую вдоль продольной оси КР) предопределенного первого размера,
- винт 69, удлиненный вдоль продольной оси КР, установленный в кронштейне 67 и сопряженный с V-образной канавкой 66.
Винт 69 содержит торец 70 с краевой поверхностью, обращенной к центральной направляющей ВН. Краевая поверхность торца 70 представляет микронеровности (в частности, высоту микронеровностей измеряемую вдоль продольной оси КР) предопределенного второго размера.
Следует заметить, что форма канавки 66 может быть иной: U-образной или П-образной (на чертежах не показаны), однако чаще используются V-образные канавки, как наиболее технологичные.
Иглы 15 для туннельных измерений могут быть заранее изготовлены одинаковой длины. Это может быть осуществлено путем подшлифовки нерабочих торцов иглы 15 (противоположных острию 71) с последующим контролем длины иглы 15 под оптическим микроскопом 8. Игла 15 может быть установлена в V-образную канавку 66 кронштейна 67 до упора 68 и зажата винтом 69. При этом винт 69 может быть сопряжен с V-образной канавкой 66 и, как следствие, с иглой 15. Чтобы в процессе затяжки в кронштейне 67 игла 15 не отходила от упора 68, винт 69 (продольную ось КР винта 69) смещают относительно центральной направляющей ВН V-образной канавки 66 на величину L1 - 10-3 М при правой резьбе (например, равной М2) винта 69 (фигура 7). Таким образом, в процессе закрепления в кронштейне 67 иглы 15, край (краевая поверхность, обращенная к игле 15) торца 70 винта 69, имеющего. правую резьбу, при вращении оказывает силовое воздействие на иглу 15, направленное в сторону упора 68. Это обеспечивает надежный контакт между иглой 15 и упором 68.
Кроме этого существует альтернативная возможность на винте 69 и соответственно в кронштейне 67 использовать левую резьбу. В этом случае при закреплении иглы 15 она может перемещаться в сторону от упора 68. Это может быть необходимым в том случае, если туннельные измерения связаны с многократным использованием одной иглы 15. При этом затупившийся конец (острие) 71 иглы 15 обрезают ножницами, в результате чего она укорачивается. Чтобы сохранить положение острия 71 иглы 15 ее в процессе закрепления в кронштейне 67 можно подвинуть от упора 68. При этом нерабочий торец иглы 15 отойдет от упора 68 (на фигуре 8 не показано). При резьбе винта 69 равной М3*0,5 и диаметре иглы 15 порядка 0,5*10-3 м, эта подвижка может достигать величины 1,5*10-3 м, что обеспечит постоянный вылет 1.2 иглы 15 после ее срезов, например, четырех-пяти срезов. При аккуратном срезе игла укорачивается примерно на 0,5*10-3 м. Следует заметить, что для того, чтобы происходило контролируемое перемещение иглы 15 вдоль центральной направляющей ВН в процессе ее закрепления (для обеспечения постоянного вылета L2 иглы 15 после ее срезов), упомянутый выше второй размер краевой поверхности торца 70 должен быть больше первого размера микронеровностей V-образной канавки 66. В частности, высота вдоль продольной оси КР микронеровностей V-образной канавки 66 может быть в пределах от 10-6 М до 5*10-6 м, а высота вдоль продольной оси КР микронеровностей краевой поверхности торца 70 может быть в пределах от 2*10-5 м до 10-4 м. При этом микронеровности краевой поверхности торца 70 будут захватывать иглу 15 и перемещать ее по V-образной канавке 66 по направлению центральной направляющей ВН практически без сопротивления со стороны микронеровностей V-образной канавки 66.
В том случае, если не требуется перемещение иглы 15 в процессе ее фиксации в кронштейне 67, упомянутый выше второй размер краевой поверхности торца 70 должен быть меньше первого размера микронеровностей V-образной канавки 66. В частности, высота вдоль продольной оси КР микронеровностей V-образной канавки 66 может быть в пределах от 2*10-5 м до 10-4 м, а высота вдоль продольной оси КР микронеровностей краевой поверхности торца 70 может быть в пределах от 10-6 М до 5*10-6 М.
Точный захват 65 иглы 15 может быть выполнен в виде отдельного узла и быть закрепленным на первой измерительной головке 13. Для этого в первой измерительной головке 13 может быть выполнено установочное место для закрепления в нем, например, винтами, точного захвата 65 иглы 15 (не показано).
Один из вариантов установки кантилевера 18 для атомносиловых измерений представлен на фигурах 9-11. Кантилевер 18 содержит чип 74, консоль 72, один конец которой жестко сопряжен с чипом 74, а другой представляет заострение 73. Оптимальную для атомносиловых измерений длину консоли 72 (фигуры 9-10) кантилевера 18 и координатную привязку заострения 73 относительно чипа 74 обеспечивают групповые технологии микроэлектроники. Они заключаются в том, что чип 74, консоль 72 и заострение 73 изготавливают методом фотолитографии. При этом последовательное совмещение топологических рисунков происходит с погрешностью не хуже 10-6 м. Соответственно погрешность расположения заострения 73 относительно чипа 74 составит величину от 2*10-6 м до 5*10-6 м.
Установку кантилевера 18 осуществляют в первый точный захват 75 кантилевера 18 с использованием первой опоры 76, второй опоры 77 со скосом 78 и пружинного элемента 79. Первая 76 и вторая 77 опоры, а также упругий (например, пружинный) элемент 79 закреплены на первой пластине 80 (например, винтами, не показано). В первом точном захвате 75 установка и съем кантилевера 18 обеспечены за счет движения кантилевера 18 по направлению, указанному стрелкой С на фигуре 11. Подвижка кантилевера 18 до скоса 78 при его установке может быть осуществлена вручную.
Первый точный захват 75 может быть отдельным узлом и закреплен на второй измерительной головке 16. Для этого во второй измерительной головке 16 может быть выполнено установочное место для закрепления в нем винтами первого точного захвата кантилевера 75. Такая установка позволяет выходить заострению 73 в исследуемую зону образца 6 с высокой точностью (порядка 5*10-6 м), например, после смены на новый вышедшего из строя кантилевера 18.
Как показано на фигурах 12-13, установку кантилевера 18 также можно осуществить во второй (альтернативный первому) точный захват 81 кантилевера 18. Второй точный захват 81 содержит вторую пластину 82, на которой закреплены третья опора 83 и четвертая опора 84 со скосом 85, а также эксцентрик 86 с упругим (например, витоновым) элементом 87. Закрепление кантилевера 18 происходит эксцентриком 86 через упругий элемент 87. При его левой резьбе (то есть при вращении по направлению стрелки О против часовой стрелки на фигуре 12) чип 74 кантилевера 18 будет одновременно прижиматься к скосу 85 и третьей опоре 83. Это обеспечит быструю, точную и надежную установку кантилевера 18 во втором точном захвате 81.
Водном из вариантов возможно сопряжение усложненных аналогов первой 13 и второй 16 измерительных головок, представленных на фигуре 14 усложненной измерительной головкой 93 (удлиненной вдоль привилегированной оси E1E2), с механизированными приводами. В этом случае на направляющей 88 на фигуре 14 (аналоге направляющей 10 на фигуре 1) закреплен механизированный привод, содержащий электродвигатель 89 с редуктором 90. Также механизированный привод содержит винт, гайку и фиксатор (не показаны). Механизированный привод запрещает угловой проворот толкателя 91. Последний совершает только линейное перемещение вдоль направляющей 88 параллельно привилегированной оси E1E2 на фигуре 14. Толкатель 91 может быть сопряжен с выборкой 92 усложненной измерительной головки 93, благодаря чему одновременно обеспечивается возможность линейного перемещения усложненной измерительной головки 93 и ее откидывания, например, для замены иглы 15. Для повышения надежности работы на усложненной измерительной головке 93 может быть установлен магнит 94, обеспечивающей ее поджим к направляющей 88. Для надежного притягивания магнита 94 направляющая 88 может быть изготовлена из ферромагнитного материала. Для установки усложненной измерительной головки 93 в первом и втором крайних положениях (ограничивающих ход усложненной измерительной головки 93 вдоль привилегированной оси E1E2) направляющая 88 может быть снабжена датчиками первого и второго крайнего положений 95 и 96. В качестве таких датчиков 95 и 96 первого и второго крайних положений могут быть использованы оптические датчики, датчики на основе герконов, либо контактные электрические датчики. Сигнал об остановке в первом крайнем положении дается датчиком 95 первого крайнего положений при электрическом замыкании первых контактов 97 и 98 первым гибким проводником 99, закрепленным на усложненной измерительной головке 93. В другом (втором) крайнем положении остановка усложненной измерительной головки 93 осуществляется после соответствующего сигнала от датчика 96 второго крайнего положения, благодаря замыканию вторых контактов 100 и 101 вторым гибким проводником 102 (который также закреплен на усложненной измерительной головке 93). Остальные конструктивные элементы усложненной измерительной головки 93, изображенные на фигуре 14, аналогичны соответствующим (описанным выше) конструктивным элементам на первой 13 и второй 16 измерительных головках (см. также фигуру 1). Электродвигатель 89 и датчики первого 95 и второго 96 крайних положений электрически соединены с блоком управления 30.
Устройство работает следующим образом. Закрепляют образец 6 (фигура 1) на держателе объекта 5. Поворачивают первую 13 и вторую 16 измерительные головки из исходного положения до упора выступов 39 в торцы 40 (фигуры 2-3) захватами 14 и 17 вверх (по стрелке оси Z на фигуре 1, которая ориентирована, например, противоположно силе тяжести) и устанавливают требуемые зонды. Возвращают первую 13 и вторую 16 измерительные головки в исходное положение. Перемещают требуемую головку (например, первую измерительную головку 13) до упора в первый винт 34. Используя первый 2 и второй 7 двухкоординатные столы и оптический микроскоп 8, выбирают зону измерения. Используя блок предварительного сближения 3, осуществляют сближение образца 6 с иглой 15 до расстояния ~10-3 М до зоны измерения. Затем корректируют положение в пространстве зоны измерения с помощью первого 2 и второго 7 двухкоординатных столов. После этого производят финишное сближение образца 6 с иглой 15 и сканирование (в туннельном режиме) иглой 15 обращенной к ней поверхности образца 6.
При работе в атомно-силовом режиме после вывода второй измерительной головки 16 (фигура 1) в рабочую зону (до упора 12) лазерный луч, излучаемый лазером 20, наводят (с помощью автоматизированной подвижки лазера 20) на кантилевер 18. Далее фотоприемник 25 наводят (с помощью автоматизированной подвижки фотоприемника 25) на соответствующий лазерный луч, отраженный от кантиливера 18. После этого осуществляют окончательное сближение образца 6 с кантилевером 18 и сканирование (в атомно-силовом режиме) кантилевером 18 обращенной к нему поверхности образца 6.
Для смены режима работы (например, для смены атомно-силового режима на туннельный режим), используя блок предварительного сближения 3, отводят образец 6 от кантилевера 18. Вторую измерительную головку 16 смещают в наиболее удаленное от зоны измерений (от образца 6) крайнее положение (в крайнее правое положение второй измерительной головки 16 на фигуре 1). Первую измерительную головку 13 перемещают в зону измерения (до упора 12 на фигуре 1), после чего аналогично проводят сближение иглы 15 с образцом 6 и сканирование иглой 15 обращенной к ней поверхности образца 6 (в туннельном режиме).
При использовании в туннельном режиме первой (туннельной) измерительной головки 13, лазер 20 и фотоприемник 25 обычно не используется.
Жидкостной модуль 45 (фигура 4) устанавливают в ловитель 42 при разведенных в разные стороны первой 13 и второй 16 измерительных головках.
Резервуар 49 закрепляют на держателе объекта 5, образец 6 устанавливают в резервуаре 49, заливают жидкость и проводят измерения в силовом режиме зондом, т.е. кантилевером 48 для жидкостных измерений, как описывалось выше. При измерениях в электрохимическом режиме на проводящую прижимную лапку может быть подано напряжение из блока 30.
Модуль измерения твердости 53 устанавливают на платформу 9 в ловитель 42 аналогично жидкостному модулю 45 и осуществляют сближение образца 6 с иглой 57. После этого с использованием кварцевого резонатора 56 проводят сканирование и измерения твердости образца 6. Амплитуда колебаний кварцевого резонатора 56 (передаваемая в виде сигнала блоку 30 и фиксируемая им), меняется в зависимости от изменения твердости измеряемой зоны (поверхности образца, обращенной к игле 57).
Работа блока нагрева 59 заключается в подаче из блока 30 тока на спираль 60 в соответствии с требуемой температурой, которую фиксирует термопара 62. Помимо этого температуру образца можно измерять дистанционно бесконтактным измерителем температуры 63 (оптическим пирометром или инфракрасным термометром), который пригоден также для тарировки термопары 62. Процесс закрепления соответственно иглы 15 в точном захвате 65 (фигуры 7-8) и кантилевера 18 в первом 75 или альтернативном ему втором 81 точных захватах (фигуры 9-13) подробно описан выше и, во избежание повторений, здесь опущен.
Специфика работы усложненной (механизированной) измерительной головки 93 связана с выбором толщины первого 99 и второго 102 гибких проводников и их настройки. Они могут быть изготовлены из бериллиевой бронзы.
Для уменьшения вероятности возникновения электрической дуги (искр) при электрическом соединении первый 99 гибкий проводник касается первых контактов 97, 98 поочередно, т.е. неодновременно. Например, сначала первый 99 гибкий проводник касается одного первого контакта под номером 97 на фигуре 14 и лишь потом, спустя предопределенное первое время релаксации T1, касается другого первого контакта под номером 98 на фигуре 14, в конечном итоге замыкая собой первые контакты 97, 98 друг на друга практически без создания искр. Для этого первые контакты 97, 98 разнесены друг от друга вдоль по привилегированной оси E1E2 на предопределенное расстояние, например, от 0,1*10-3 м до 0,2*10-3 м. Та же цель может быть достигнута путем селективного изгиба соответствующей амплитуды первого 99 гибкого проводник в плоскости, содержащий привилегированную ось E1E2.
По аналогии, для уменьшения вероятности возникновения искр при электрическом соединении второй 102 гибкий проводник касается вторых контактов 100, 101 поочередно, т.е. неодновременно. Например, сначала второй 102 гибкий проводник касается одного второго контакта под номером 100 на фигуре 14 и лишь потом, спустя предопределенное второе время релаксации Т2, касается другого второго контакта под номером 101 на фигуре 14, в конечном итоге замыкая собой вторые контакты 100, 101 друг на друга практически без создания искр. Для этого вторые контакты 100, 101 разнесены друг от друга вдоль по привилегированной оси E1E2 на предопределенное расстояние, например, от 0,1*10-3 М до 0,2*10-3 м. Та же цель может быть достигнута путем соответствующего селективного изгиба соответствующей амплитуды второго 102 гибкого проводник в плоскости, содержащий привилегированную ось E1E2.
Помимо этого на первый 99 и второй 102 гибкие проводники, а также на первые 97, 98, и вторые 100, 101 контакты может быть нанесено золотое покрытие для повышения надежности работы устройства.
Выполнение оптического блока 29 в виде подвижных по первым 21 и вторым 26 двухкоординатным направляющим соответственно лазера 20 и фотоприемника 25, а также снабжение платформы 9 первой 10 и второй 11 направляющими с установленными на них первой 13 и второй 16 измерительными головками, оптически сопряженными с лазером 20 и фотоприемником 25 расширяет функциональные возможности устройства за счет оперативной смены режимов работы.
Использование второго двухкоординатного стола 7 с оптическим микроскопом 8 позволяет выбирать поле измерения. Вместе с этим, благодаря упорам 12 с подвижными первыми винтами 34, возможно оперативное изменение зоны измерения. При этом второй двухкоординатный стол 7 позволяет оператору СЗК быстрее и легче находить новую зону измерения с помощью оптического микроскопа 8. Это также расширяет функциональные возможности устройства.
Использование вращения первой 13 и второй 16 измерительных головок по цилиндрическим штокам 31 (относительно первой 10 и второй 11 направляющих соответственно) обеспечивает оперативную загрузку зондов, что позволяет быстро менять режимы работы.
Применение жидкостного модуля 45 и модуля измерения твердости 53 расширяет функциональные возможности устройства.
Использование одновременно двух первых 13 (например, туннельных) или двух вторых 16 (например, атомно-силовых) измерительных головок расширяет функциональные возможности однотипных измерений. Например, можно оперативно переходить с электропроводящих на электронепроводящие кантилеверы.
Оперативно заменяемый блок нагрева 59, позволяющий использовать его во всех режимах работы, дает дополнительную информацию об объектах (образцах 6).
Включение в блок нагрева 59 одновременно термопары 62 и бесконтактного измерителя температуры 63 позволяет проводить оперативную тарировку термопары, что упрощает эксплуатацию прибора.
Использование в точном захвате 65 иглы 15 винтов 69 с правой или левой резьбой, специально обработанным торцом 70 (в частности, поверхности торца 70, обращенной к игле 15), а также с продольной осью КР, смещенной относительно центральной направляющей ВН V-образной канавки 66, позволяет осуществлять установку иглы 15 в рабочее положение с заранее заданной точностью.
Использование в первом точном захвате 75 кантилевера 18 первой опоры 76, второй опоры 77 со скосом 78 и пружинного элемента 79 позволяет осуществлять установку кантилевера 18 в рабочее положение с заранее заданной точностью.
Использование во втором точном захвате 81 кантилевера 18 третьей опоры 83, четвертой опоры 84 со скосом 85 и эксцентрика 86 с упругим элементом 87 позволяет осуществлять безопасную для гибкой балки 72 установку кантилевера 18 в рабочее положение с заранее заданной точностью.
Простая и точная установка игл 15 и кантилеверов 18 обеспечивает оперативную смену режимов работы СЗМ.
Механизированные приводы первой 13 и второй 16 измерительных головок дополнительно упрощают эксплуатацию прибора.