Результат интеллектуальной деятельности: СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ
Вид РИД
Изобретение
Изобретение относится к области навигации и топопривязки, в частности к способам инерциально-спутниковой навигации и контроля качества навигационных полей космических навигационных систем (КНС) ГЛОНАСС и GPS, формирования корректирующей информации и анализа ее качества.
Известен способ автоматизированного определения навигационно- топогеодезических параметров (см. патент №2431803 C1, G01C 23/00, опубл. 20.10.2011, Бюл. №29), принятый за прототип. Данный способ включает прием спутниковой навигационной информации, осуществляемый путем совместного или селективного режима работы в полях различных космических навигационных систем, комплексирование сигналов спутниковой и инерциальной навигационных систем с учетом информации о параметрах высоты точек местности на маршруте подвижного объекта, проведение коррекции навигационной информации, поступающей от навигационных космических аппаратов, выполняемой в режиме контрольно-корректирующей станции, имеющей собственное программно-математическое обеспечение, выдачи выходных параметров навигации и корректирующей информации по сигналам навигационных космических аппаратов внешним потребителям по автономному каналу передачи данных.
Недостатками прототипа являются:
- недостаточная точность и надежность работы навигационной системы, не обеспечивающей доступность, непрерывность и целостность навигационных определений по сигналам навигационных космических аппаратов;
- недостаточные возможности по коррекции навигационной информации, поступающей от навигационных космических аппаратов;
- недостаточные возможности работы навигационной системы в режиме опорной контрольно-корректирующей станции;
- низкая надежность и достоверность обмена информационными сообщениями между контрольно-корректирующей станцией и потребителями;
- отсутствие четкого алгоритма взаимодействия контрольно-корректирующей станции с мобильными и стационарными потребителями корректирующей информации.
Предлагаемым изобретением решается задача по повышению точности и эффективности систем инерциально-спутниковой навигациии и расширению их функциональных возможностей.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа функционирования топопривязчика в режиме контрольно-корректирующей станции (ККС), обеспечивающего режим работы навигационной аппаратуры топопривязчика и связанных с ним потребителей ГЛОНАСС/GPS в заданном районе с прецизионной точностью местоопределения, формирование корректирующей информации, включающей дифференциальные поправки и контроль качества сформированных дифференциальных поправок, сбор и обработку измерительной, навигационной и другой информации для выполнения топопривязчиком задач по назначению, регистрацию, архивацию корректирующей информации, ее выдачу по требованию оператора на устройство отображения, документирование и автоматизированную передачу по автономному каналу передачи данных.
Указанный технический результат достигается тем, что в способе функционирования топопривязчика в режиме контрольно-корректирующей станции, включающем прием спутниковой навигационной информации, проведение коррекции навигационной информации, поступающей от навигационных космических аппаратов, выполняемой в режиме контрольно-корректирующей станции (ККС), имеющей собственное программно-математическое обеспечение, выдачу выходных параметров навигации и корректирующей информации по сигналам навигационных космических аппаратов внешним потребителям по автономному каналу передачи данных, новым является то, что при аппаратной реализации, когда рабочая конфигурация ККС состоит из следующих основных аппаратных блоков, объединенных в едином модуле: опорной станции (ОС) с устройством для передачи дифференциальных поправок, контрольной станции (КС), станции интегрального контроля (СИК) с устройством для приема дифференциальных поправок, на первом этапе выполняется контроль работоспособности ККС, на втором этапе выполняется прием аппаратурой ОС и СИК сигналов всех находящихся в зоне видимости космических аппаратов (КА) КНС ГЛОНАСС и GPS, включающий запрос с ОС альманахов КНС ГЛОНАСС и GPS, запрос плановых координат и высоты точки размещения антенн ОС и СИК, расчет видимости КА КНС ГЛОНАСС и GPS на текущую дату, сравнение количества отслеживаемых приемниками ОС и СИК КА КНС ГЛОНАСС и GPS с расчетным числом КА, на третьем этапе выполняется измерение псевдодальностей и фазы несущей по всем принимаемым сигналам КНС ГЛОНАСС и GPS, временная привязка измерений к системной шкале КНС ГЛОНАСС (GPS), их регистрация с заданным темпом и выдача в реальном времени или по требованию оператора на устройстве отображения, формирование из принимаемых навигационных сообщений КА файлов, их регистрация и выдача для архивации, хранения и представления в текстовом виде, на четвертом этапе происходит получение и формирование корректирующей информации для навигационных сигналов КА ГЛОНАСС и GPS, непрерывный анализ качества рассчитанной и передаваемой корректирующей информации, выдача корректирующей информации в реальном масштабе времени в устройство для передачи дифференциальных поправок в канал передачи корректирующей информации, на пятом этапе происходит определение координат ККС в режиме накопления с постобработкой данных.
Включение в состав рабочей конфигурации ККС следующих основных аппаратных блоков, объединенных в едином модуле: опорной станции (ОС) с устройством для передачи дифференциальных поправок, контрольной станции (КС), станции интегрального контроля (СИК) с устройством для приема дифференциальных поправок, позволяет:
- осуществлять посредством КС установку и индикацию параметров инициализации ОС и СИК, получение и отображение текущих данных о работе ОС и СИК, прием информации об аномальной работе комплекса, локализация мест отказов и предоставление оператору возможности выработать соответствующие корректирующие воздействия, сохранение, по команде оператора, данных, поступающих в ходе информационного обмена от ОС и СИК, передача по выделенной линии связи наборов измерительной и цифровой информации, поступающих в ходе информационного обмена от ОС;
- осуществлять посредством ОС одновременный прием и обработку радиосигналов для всех НКА ГЛОНАСС/GPS, находящихся в зоне радиовидимости ОС, проведение автономного контроля работоспособности каждого отдельного КА, выработку ДП по КА, находящимся в слежении, оценку качества вырабатываемой КИ и выдачу предупреждений на КС в аномальных ситуациях с использованием информационно-управляющих сообщений, автоматическую непрерывную выработку пространственных координат, контроль уровня принимаемого сигнала и соотношения сигнал/шум, прием, хранение и обновление альманахов КНС ГЛОНАСС и GPS, выдачу наборов цифровой и измерительной информации, автоматический контроль функционирования;
- расширить функциональные возможности топопривязчика.
Выполнение на первом этапе контроля работоспособности ККС позволяет:
- произвести загрузку установленной в ККС операционной системы, запустить программно-математическое обеспечение;
- запросить с ОС предыдущие альманахи по КНС ГЛОНАСС и GPS;
- обеспечить проверку наличия информационного обмена как в самой ККС между ОС и КС, так и по каналу выделенной линии связи;
- установить начальные условия по следующим параметрам: координаты пункта и дату расчета временных зон видимости, шкалу времени, в которой будут представлены результаты расчетов, формат используемых файлов альманахов.
Выполнение на втором этапе приема аппаратурой ОС и СИК сигналов всех находящихся в зоне видимости КА КНС ГЛОНАСС и GPS позволяет:
- запросить с ОС текущие альманахи КНС ГЛОНАСС и GPS;
- произвести расчет видимости КА КНС ГЛОНАСС и GPS на текущую дату;
- проконтролировать состояние каналов приемных устройств ОС и СИК;
- сравнить количество отслеживаемых приемниками ОС и СИК КА КНС ГЛОНАСС и GPS с числом КА, которые в текущий момент времени должны находиться в зонах радиообзора антенн ОС и СИК согласно расчету видимости;
- проверить соответствие системных номеров КА ГЛОНАСС и GPS, отслеживаемых приемниками ОС и СИК, системным номерам спутников, которые должны быть радиовидимыми, согласно расчету видимости.
Выполнение на третьем этапе измерения псевдодальностей и фазы несущей по всем принимаемым сигналам КНС ГЛОНАСС и GPS, временной привязки измерений к системной шкале КНС ГЛОНАСС (GPS), их регистрации с заданным темпом и выдачи в реальном времени или по требованию оператора на устройстве отображения, формирования из принимаемых навигационных сообщений КА файлов, их регистрации и выдачи для архивации, хранения и представления в текстовом виде, позволяет:
- осуществлять запись на жесткий диск КС наборы данных из числа: альманахов КНС, эфемерид КА КНС ГЛОНАСС и GPS, ионосферных данных, привязанных ко времени измерений радионавигационных параметров по всем КА ГЛОНАСС и GPS, которые визировались ОС в течение всей ее работы;
- установить частоту записи (дискретность по времени) в соответствующие файлы наборов данных;
- произвести инициализацию информационного обмена по выделенному для этих целей ретрансляционному СОМ-порту, определив типы подлежащих выдаче информационных сообщений;
- подтвердить факт регистрации (сохранения на жестком диске КС) на всем интервале времени работы КНС с заданной дискретностью по времени наборов данных;
- с помощью дополнительной программы представлять файлы измерений в текстовом виде.
Осуществление на четвертом этапе получения и формирования корректирующей информации для навигационных сигналов КА ГЛО-НАСС и GPS непрерывного анализа качества рассчитанной и передаваемой корректирующей информации, выдачи корректирующей информации в реальном масштабе времени в устройство для передачи дифференциальных поправок в канал передачи корректирующей информации позволяет:
- удостовериться, что дифференциальные поправки на ОС формируются и выдача их не запрещена;
- разрешить СИК прием и использование корректирующей информации;
- обеспечить информационный обмен между портом выдачи дифференциальных поправок ОС и портом приема дифференциальных поправок СИК с приемопередающими модемами радиоканала для приема-выдачи корректирующей информации;
- установить скорость передачи информации из ОС в СИК по нуль-модемному кабелю;
- выполнить действия для установления расписания передачи информации.
Определение на пятом этапе координат ККС в режиме накопления с постобработкой данных позволяет:
- по истечении каждого часа работы ККС произвести апостериорную обработку файлов данных за предыдущий час работы;
- убедиться в отсутствии продолжительных (более 1 мин) пропусков накопления данных;
- произвести апостериорную обработку накопленных ККС данных с алгоритмической компенсацией ионосферных и тропосферных погрешностей измерений радионавигационных параметров;
- по результатам апостериорной обработки накопленных ККС данных определить координаты фазового центра антенны ОС в режиме абсолютной навигации. (СИК определяет координаты ФЦА в дифференциальном режиме по поправкам от ОС.)
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
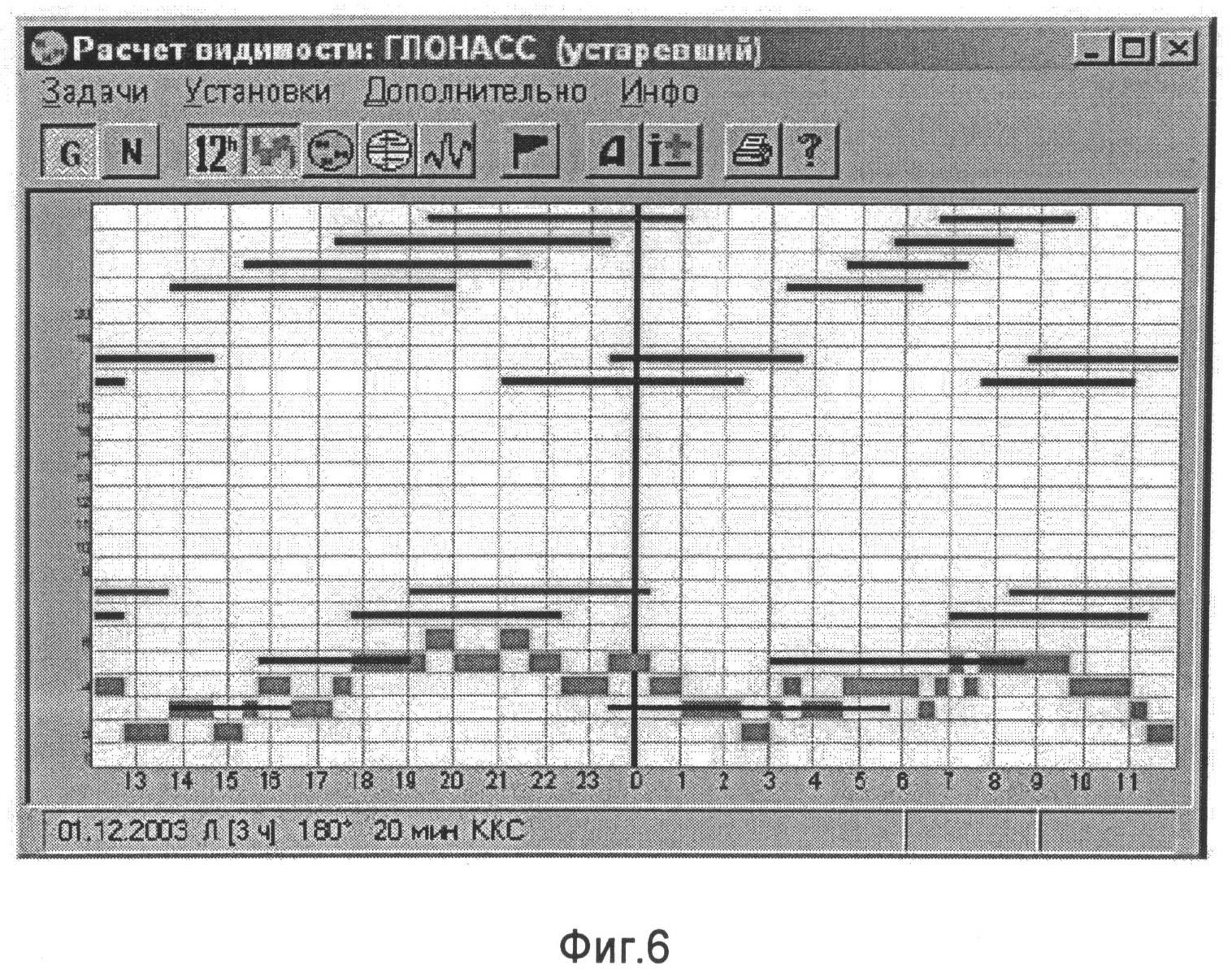
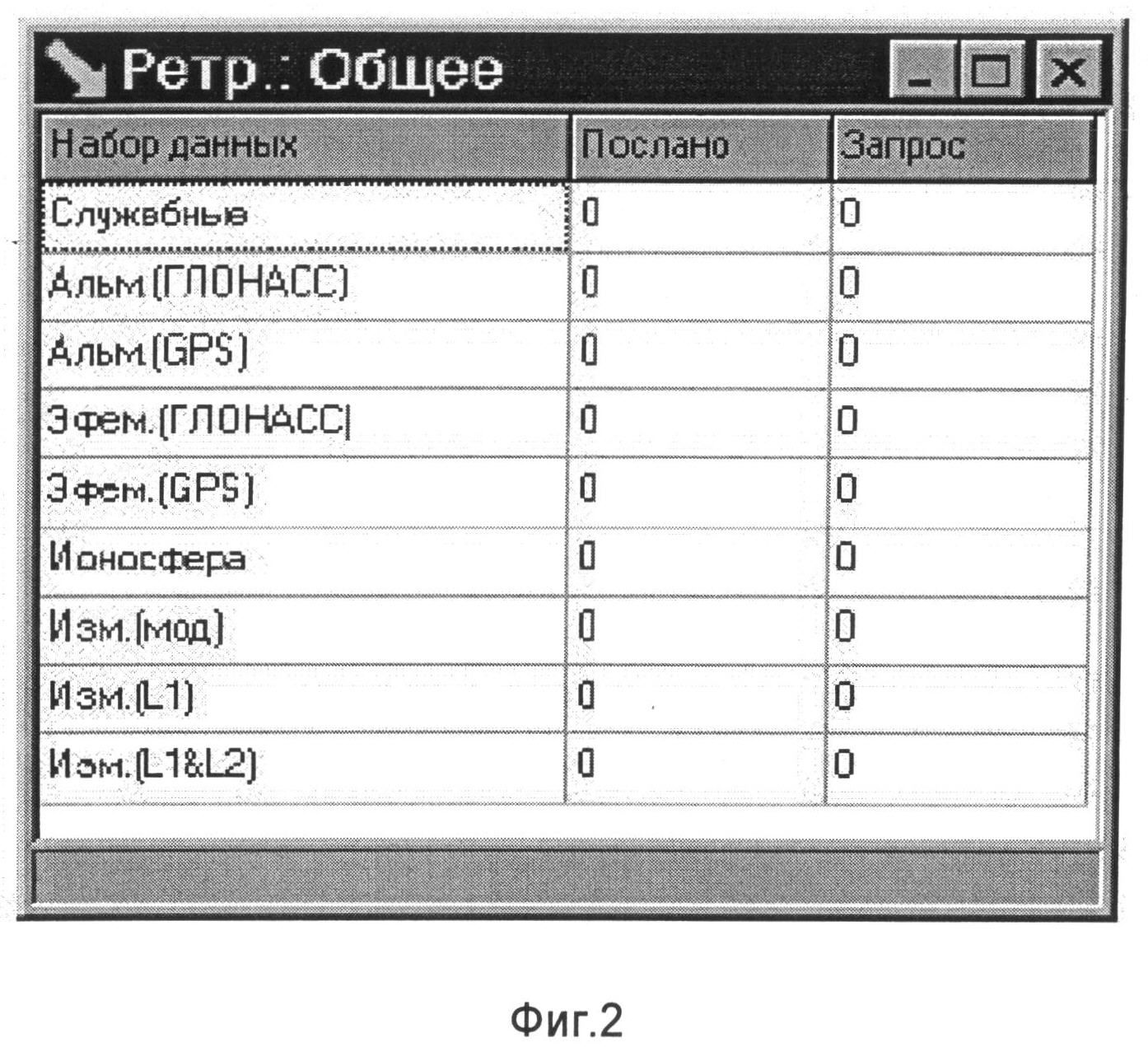
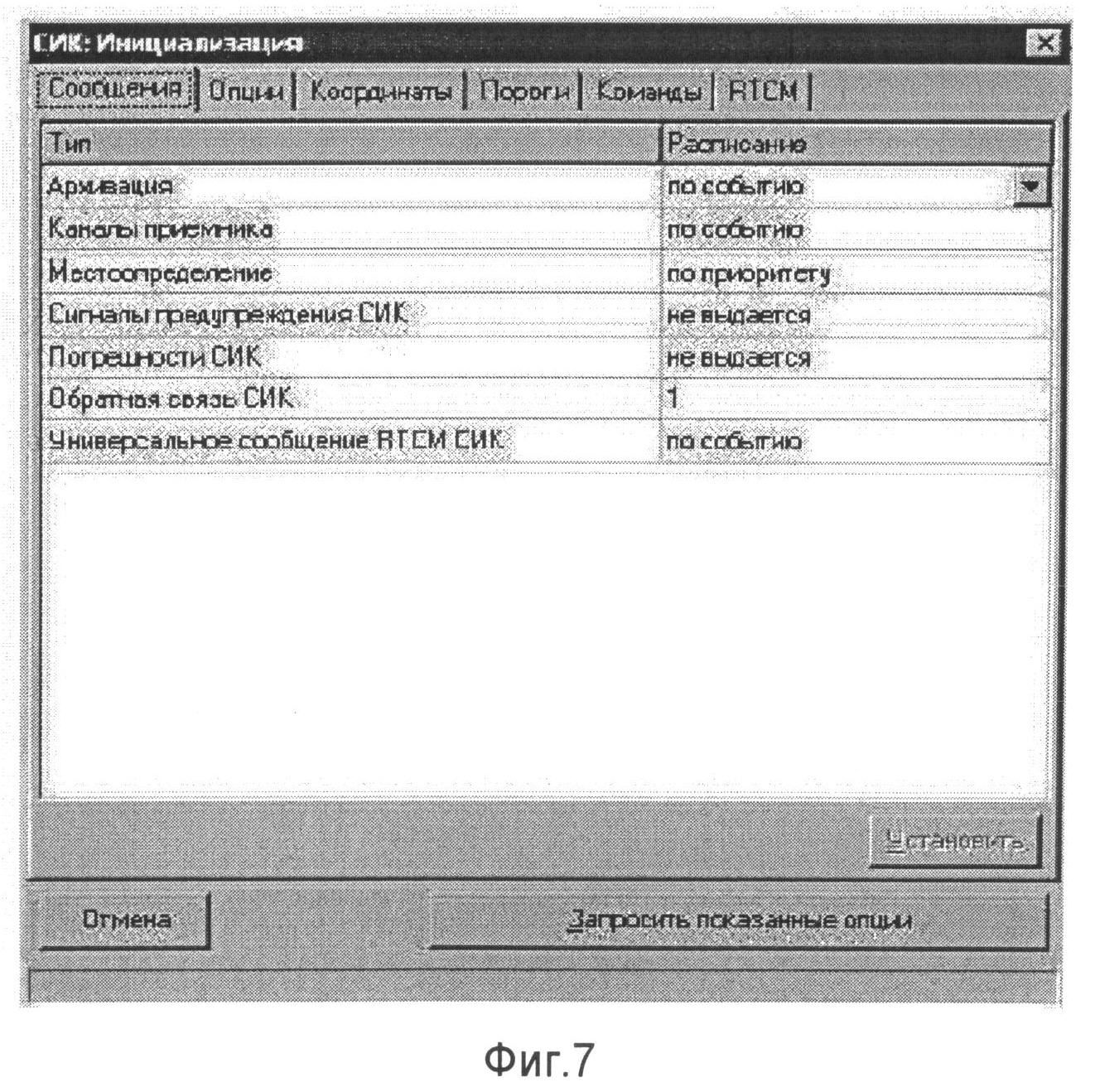
Сущность изобретения поясняется чертежами, где на фиг.1 показана структурная схема ККС; на фиг.2 - диалоговое окно для запроса альманахов КНС ГЛОНАСС и GPS; на фиг.3 - вкладка: интегральная информация о составе группировок КНС ГЛОНАСС и GPS; на фиг.4 - вкладка: параметры ОС в части опорных координат; на фиг.5 - вкладка: отображение информации о работе ОС с КА с опцией контроля соотношения сигнал/шум; на фиг.6 - окно с результатами расчета видимости КА КНС ГЛОНАСС; на фиг.7 - вкладка: состав и расписание выдачи сообщений информационного обмена СИК и КС; на фиг.8 - вкладка: оценка погрешностей псевдодальностей с введенными в них дифференциальными поправками по КНС ГЛОНАСС; на фиг.9 - вкладка: ограничения, используемые при моделировании вычислений местоположения ОС 1 по измерениям КНС: ГЛОНАСС, GPS, ГЛОНАСС+GPS.
ККС - комплекс радиотехнических и программно-вычислительных средств, осуществляющий формирование КИ по КНС ГЛОНАСС/GPS и контролирующий качество функционирования КНС ГЛОНАСС/GPS в объявленной рабочей зоне.
Кроме того, ККС может выполнять следующие программные функции: ретрансляцию сообщений на выделенную линию связи, управление РММ, получение команд внешнего управления.
Рабочая конфигурация ККС для функционирования ее в составе топопривязчика, предназначенного для топогеодезического обеспечения боевых порядков войск, состоит из следующих основных аппаратных блоков, объединенных в едином модуле: опорной станции (ОС) 1 с устройством для передачи дифференциальных поправок 2, контрольной станции (КС) 3, станции интегрального контроля (СИК) 4 с устройством для приема дифференциальных поправок 5. ОС 1 связана с антенным модулем (AM) 6, СИК 4 - с AM 7. КС 3 связана с системой связи и передачи данных (ССПД) 8.
КС 3 - это оборудование и программно-вычислительное средство, входящее в состав ККС. КС 3 предназначается для оперативного контроля состояния и управления функционированием комплекса аппаратных средств и программных функций ККС с заданными характеристиками. КС управляет установкой и изменением параметров оборудования.
ОС 1 представляет собой навигационный приемник. ОС 2 предназначена для выработки ДП к измерениям по всем КА ГЛОНАСС/GPS, находящихся в зоне радиовидимости, а также формирования и передачи сформированных сообщений.
СИК 4 представляет собой навигационный приемник со следующими базовыми характеристиками. СИК 4 предназначена для непрерывного контроля качества КИ, вырабатываемой ОС 1. СИК 4 принимает ДП и проверяет их нахождение в допустимых пределах. СИК 4 постоянно обеспечивает обратную связь с ОС 1 для индикации и контроля ее нормального функционирования. При выходе КИ за допустимые пределы вырабатывается соответствующий сигнал тревоги.
Алгоритм реализации способа функционирования топопривязчика в режиме контрольно-корректирующей станции реализуется следующим образом.
1. На первом этапе выполняется контроль работоспособности ККС. ККС в топопривязчике размещается внутри кузова-фургона, на автоматизированном рабочем месте оператора, обеспечивающем удобство подключения и управления аппаратурой и проведения необходимых регламентных работ. AM 6 ОС 1, AM 7 СИК 4 установлены на крыше кузова-фургона таким образом, чтобы обеспечить возможность приема радиосигналов КА из любой точки верхней полусферы, начиная от углов места 10°. После перевода крышки дисплея ККС в вертикальное положение, включения питания и запуска программно-математического обеспечения производится собственно контроль работоспособности контроля ККС. Контроль работоспособности ККС сводится к выполнению следующих запросов и вызовов:
- запрос с ОС 1 предыдущих альманахов КНС ГЛОНАСС и GPS, на фиг.2 представлено диалоговое окно для запроса альманахов КНС ГЛОНАСС и GPS;
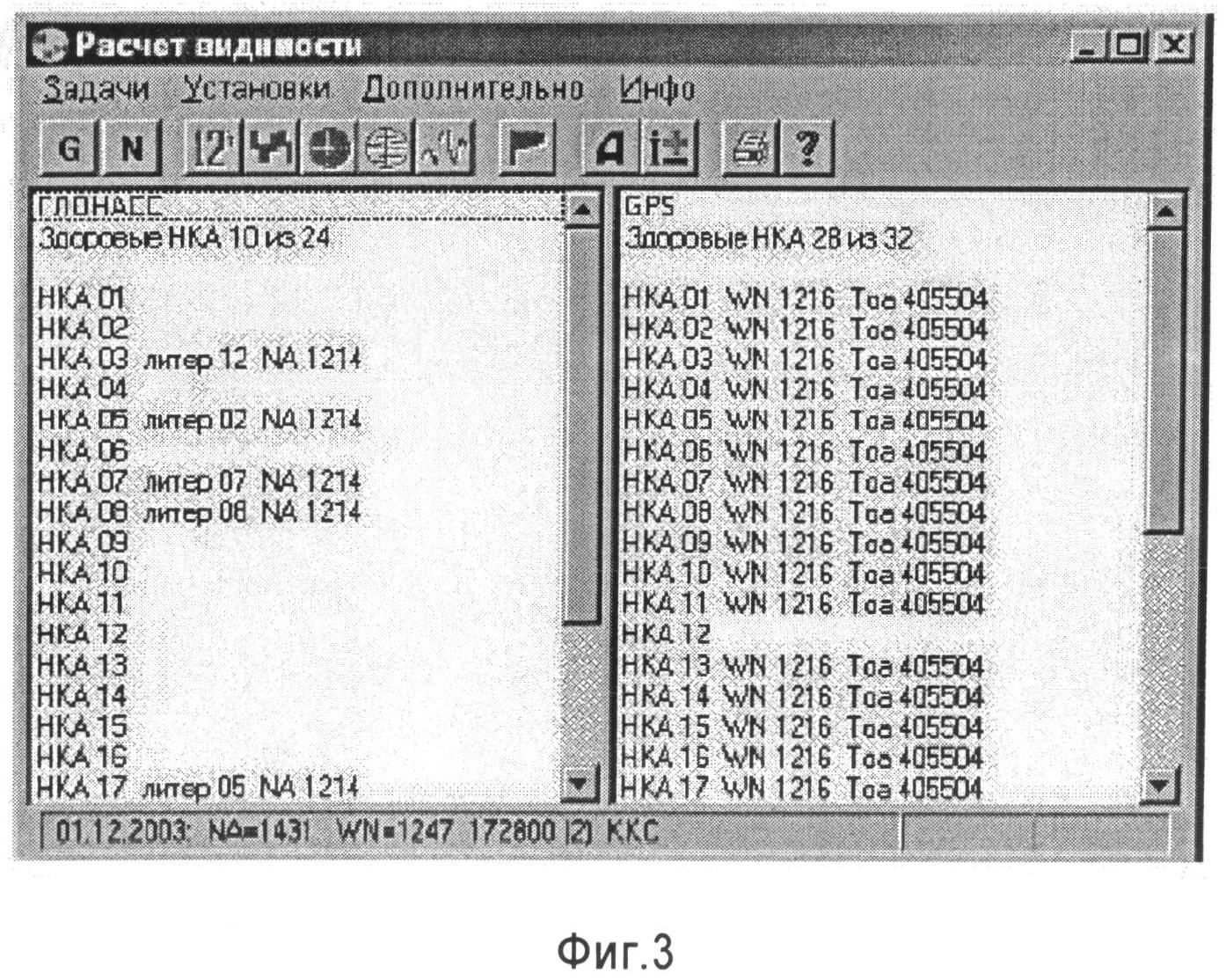
- вызов программы «Расчет видимости», на фиг.3 представлена вкладка: интегральная информация о составе группировок КНС ГЛОНАСС и GPS;
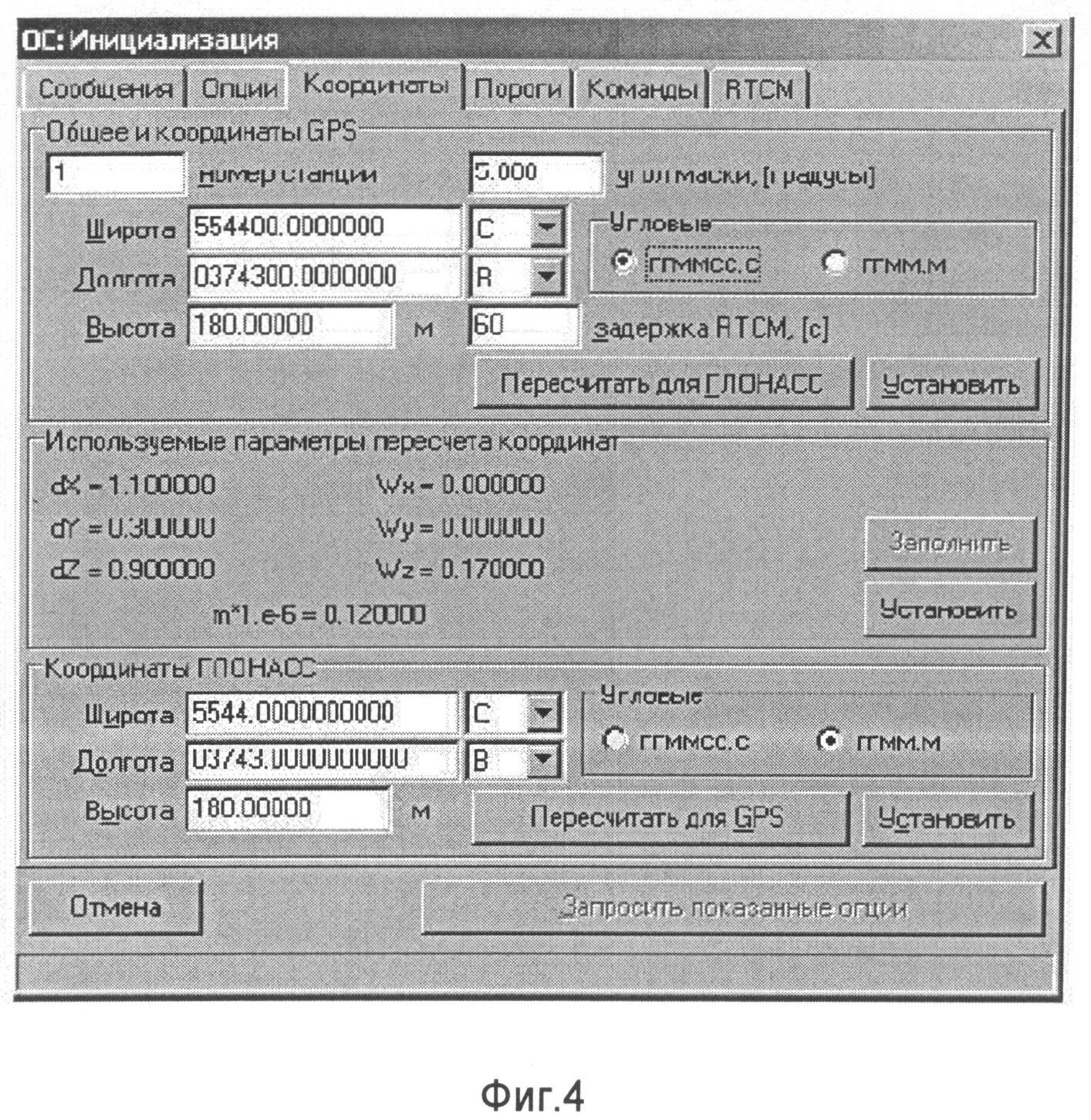
- запрос плановых координат и высоты точки размещения антенны ОС 1, угол маски антенны ОС 1, на фиг.4 представлена вкладка: параметры ОС 1 в части опорных координат;
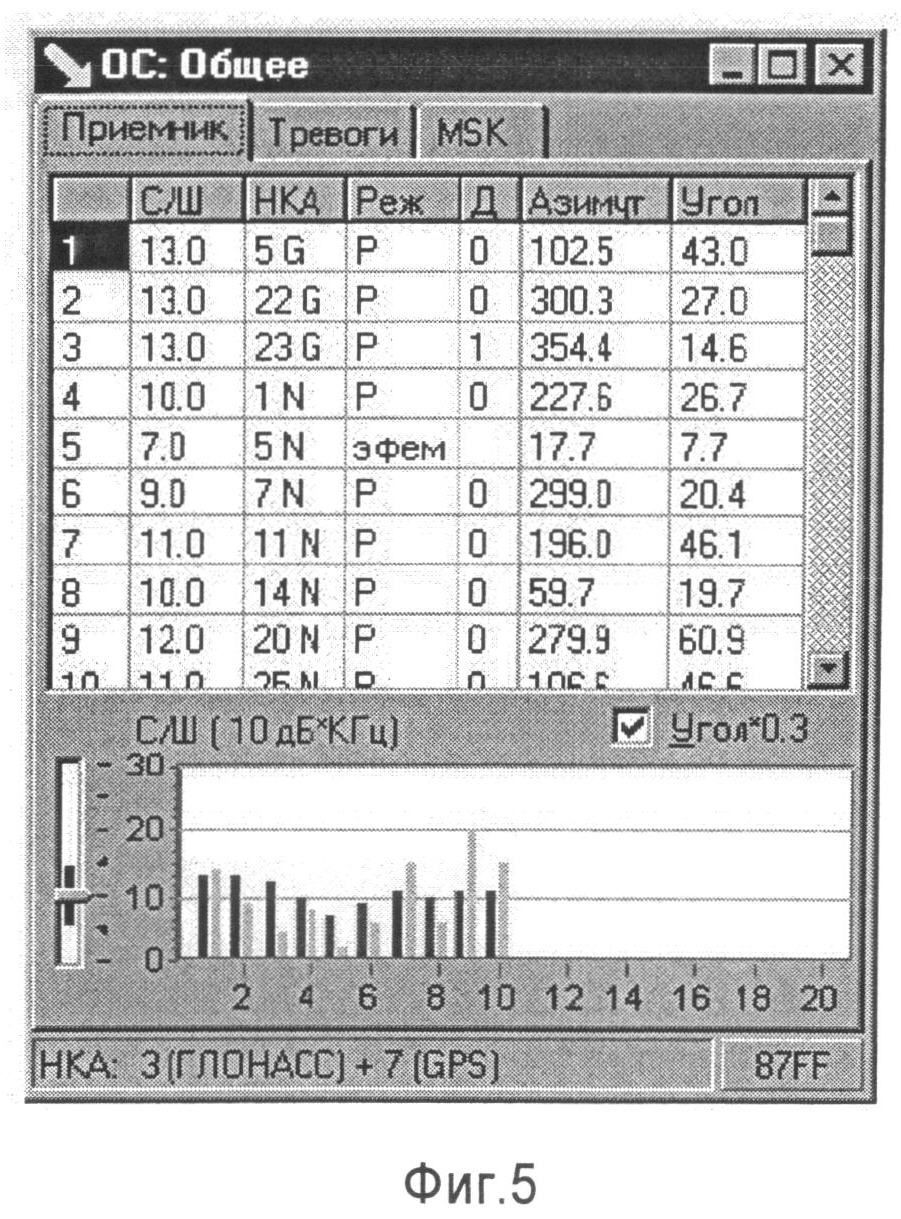
- вызов окон, отображающих состояние каналов приемных устройств ОС 1 и СИК 4, на фиг.5 представлена вкладка: отображение информации о работе ОС 1 с КА с опцией контроля соотношения сигнал/шум.
В программно-математическом обеспечении ОС 1 и СИК 4 реализован следующий алгоритм контроля уровней принимаемых навигационных радиосигналов: если мощность принимаемого радиосигнала какого-либо КА менее чем в два раза (+3 дБ) превышает мощность шума в полосе 1 кГц в канале приемника, то этот канал переводится в поиск навигационного радиосигнала данного КА.
2. На втором этапе выполняется прием аппаратурой ОС 1 и СИК 4 сигналов всех находящихся в зоне видимости КА КНС ГЛОНАСС и GPS:
- запрос с ОС 1 текущих альманахов КНС ГЛОНАСС и GPS, плановых координат и высоты точки размещения антенны ОС 1, угла маски антенны ОС 1;
- запуск программы «Расчет видимости», убедившись, что начальные данные для расчета соответствуют параметрам инициализации ОС 1 и СИК 4, полученным на первом этапе;
- проведение расчета видимости КА КНС ГЛОНАСС и GPS на текущую дату. Если зоны радиообзора антенны ОС 1 имеют затенения, определяются системные номера КА ГЛОНАСС и GPS, находящиеся в зонах затенения в текущий момент времени, и исключаются из расчета. На фиг.6 представлено окно с результатами расчета видимости КА КНС ГЛОНАСС;
- сравнение количества отслеживаемых КА КНС ГЛОНАСС и GPS с числом КА, которые в текущий момент времени должны находиться в зонах радиообзора согласно расчету видимости;
- проверка соответствия системных номеров отслеживаемых КА ГЛОНАСС и GPS системным номерам спутников, которые должны быть радиовидимыми, согласно расчету видимости.
На третьем этапе выполняется измерение псевдодальностей и фазы несущей по всем принимаемым сигналам КНС ГЛОНАСС и GPS, временная привязка измерений к системной шкале КНС ГЛОНАСС (GPS), их регистрация с заданным темпом и выдача в реальном времени или по требованию оператора на устройстве отображения, формирование из принимаемых навигационных сообщений КА файлов, их регистрация и выдача для архивации, хранения и представления в текстовом виде:
- инициализация информационного обмена по выделенному для этих целей ретрансляционному СОМ-порту, предварительно определив типы подлежащих выдаче по интерфейсу RS-232 информационных сообщений (допускается произвольный выбор наборов выдаваемых данных) из числа: альманахи КНС, принятые ОС 1, эфемериды КА КНС ГЛОНАСС и GPS, получаемые ОС 1 в ходе работы, ионосферные данные, полученные ОС 1, привязанные ко времени измерения радионавигационных параметров по всем КА ГЛОНАСС и GPS, которые визирует ОС 1 в ходе работы, псевдодальности, измеренные по фазе дальномерных кодов, радиальные псевдоскорости или доплеровские смещения несущих частот, текущие фазы несущих частот навигационных радиосигналов, на фиг.7 представлена вкладка: состав и расписание выдачи сообщений информационного обмена СИК 4 и КС 3;
- установка частоты выдачи (дискретности по времени) на ретрансляционный СОМ-порт наборов данных, разрешенных при инициализации;
- формирование и выдача на ретрансляционный СОМ-порт двух видов наборов измерительной информации: «сырых» (необработанных) одночастотных измерений, «модифицированных» (прошедших вторичную обработку) измерений (сглаживание, фильтрация, введение корректирующих поправок и т.д.);
- подтверждение факта регистрации (сохранения на жестком диске КС 3) на всем интервале времени работы ККС с заданной дискретностью по времени наборов данных. После запуска программы ККС на жестком диске КС 3 автоматически создается директория, в которой создаются файлы, содержащие сохраняемые данные. По истечении каждого часа работы ККС путем непосредственного просмотра данной директории подтверждается факт формирования новых информационных файлов;
- для представления файла измерений в текстовом виде используется дополнительная программа, которая перекодирует информацию в формат RINEX.
Автоматизированная выдача на устройство отображения хранимой и поступающей информации и возможность ее документирования осуществляются следующим образом.
В аппаратуре ККС с ее программно-математическим обеспечением реализован многооконный графический интерфейс, обеспечивающий визуализацию (отображение) в реальном масштабе времени получаемых в ходе работы аппаратуры данных на экране монитора КС 3.
В программно-математическом обеспечении ККС реализована возможность автоматического сохранения данных, получаемых ККС в ходе ее работы, на жестком диске КС 3.
В программно-математическом обеспечении ККС реализована возможность документирования информации с помощью накопителя на оптических дисках DVD-RW.
Для вывода на печать данных из основной программы КС 3 используется текстовый редактор Word, который устанавливается на КС 3.
На четвертом этапе происходит получение и формирование корректирующей информации для навигационных сигналов КА КНС ГЛОНАСС и GPS, непрерывный анализ качества рассчитанной и передаваемой корректирующей информации, выдача корректирующей информации в реальном масштабе времени в устройство для передачи дифференциальных поправок в канал передачи корректирующей информации:
- получение подтверждения, что дифференциальные поправки на ОС 1 формируются (не обязательно по всем отслеживаемым приемником ОС 1 КА КНС ГЛОНАСС и GPS) и выдача их не запрещена;
- получение разрешения СИК 4 на прием и использование корректирующей информации;
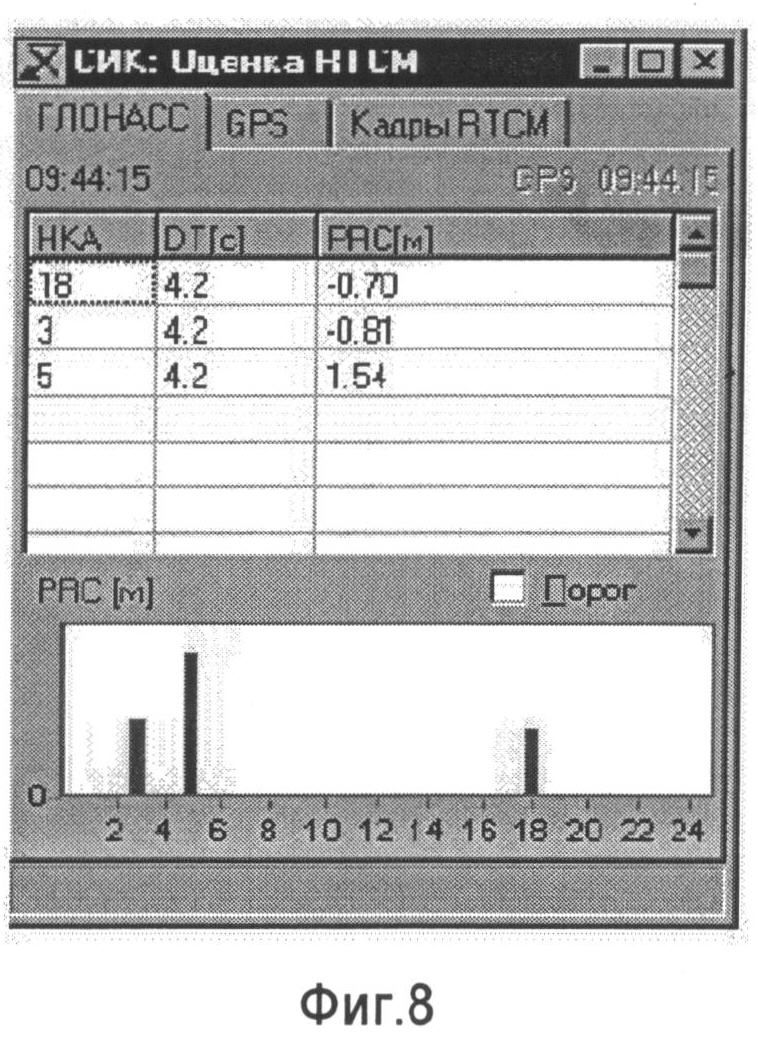
- получение подтверждения, что измерения радионавигационных параметров в СИК 4 корректируются дифференциальными поправками по тем КА КНС ГЛОНАСС и GPS, по которым: поправки вырабатываются на ОС 1, не запрещена выдача поправок с ОС 1, СИК 4 принимает навигационные радиосигналы, на фиг.8 представлена вкладка: оценка погрешностей псевдодальностей с введенными в них дифференциальными поправками по КНС ГЛОНАСС;
- установка скорости передачи информации из ОС 1 в СИК 4;
- выполнение действий для установки расписания передачи информации.
На пятом этапе происходит определение координат ККС в режиме накопления с постобработкой данных:
- контроль создания новых файлов сохраняемых данных. Факт формирования новых информационных файлов проверяется путем непосредственного просмотра выделенной директории;
- по истечении каждого часа работы ККС проведение в соответствии с программой апостериорной обработки апостериорной обработки файлов данных за предыдущий час работы. При этом необходимо убедиться в отсутствии продолжительных (более 1 мин) пропусков накопления данных;
- проведение апостериорной обработки накопленных ККС данных с алгоритмической компенсацией ионосферных и тропосферных погрешностей измерений радионавигационных параметров;
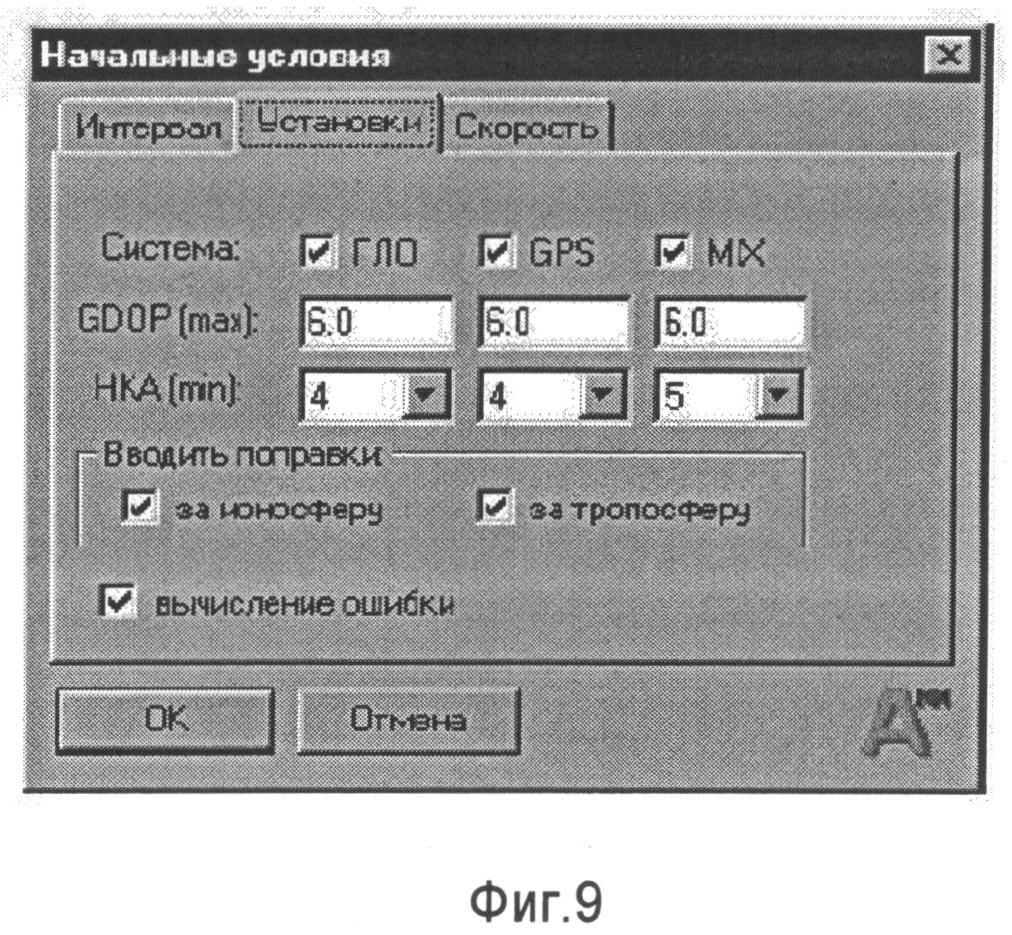
- определение по результатам апостериорной обработки накопленных ККС данных координат фазового центра антенны ОС 1. Координаты могут быть представлены в системах координат ПЗ-90, WGS-84 или СК-42 и могут быть при этом определены по созвездиям КА: ГЛОНАСС, GPS, ГЛОНАСС+GPS, на фиг.9 представлена вкладка: ограничения, используемые при моделировании вычислений местоположения ОС 1 по измерениям КНС: ГЛОНАСС, GPS, ГЛО-HACC+GPS.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа функционирования топопривязчика в режиме контрольно-корректирующей станции (ККС), обеспечивающего режим работы навигационной аппаратуры топопривязчика и связанных с ним потребителей ГЛОНАСС/GPS в заданном районе с прецизионной точностью местоопределения, формирование корректирующей информации, включающей дифференциальные поправки и контроль качества сформированных дифференциальных поправок, сбор и обработку измерительной, навигационной и другой информации для выполнения топопривязчиком задач по назначению, регистрацию, архивирование корректирующей информации, ее выдачу по требованию оператора на устройство отображения, документирование и автоматизированную передачу по автономному каналу передачи данных.
Способ функционирования топопривязчика в режиме контрольно-корректирующей станции, включающий прием спутниковой навигационной информации, проведение коррекции навигационной информации, поступающей от навигационных космических аппаратов, выполняемой в режиме контрольно-корректирующей станции (ККС), имеющей собственное программно-математическое обеспечение, выдачу выходных параметров навигации и корректирующей информации по сигналам навигационных космических аппаратов внешним потребителям по автономному каналу передачи данных, отличающийся тем, что при аппаратной реализации, когда рабочая конфигурация ККС состоит из следующих основных аппаратных блоков, объединенных в едином модуле: опорной станции (ОС) с устройством для передачи дифференциальных поправок, контрольной станции (КС), станции интегрального контроля (СИК) с устройством для приема дифференциальных поправок, на первом этапе выполняется контроль работоспособности ККС, на втором этапе выполняется прием аппаратурой ОС и СИК сигналов всех находящихся в зоне видимости КА КНС ГЛОНАСС и GPS, включающий запрос с ОС альманахов КНС ГЛОНАСС и GPS, запрос плановых координат и высоты точки размещения антенн ОС и СИК, расчет видимости КА КНС ГЛОНАСС и GPS на текущую дату, сравнение количества отслеживаемых приемниками ОС и СИК КА КНС ГЛОНАСС и GPS с расчетным числом КА, на третьем этапе выполняется измерение псевдодальностей и фазы несущей по всем принимаемым сигналам КНС ГЛОНАСС и GPS, временная привязка измерений к системной шкале КНС ГЛОНАСС (GPS), их регистрация с заданным темпом и выдача в реальном времени или по требованию оператора на устройстве отображения, формирование из принимаемых навигационных сообщений КА файлов, их регистрация и выдача для архивации, хранения и представления в текстовом виде, на четвертом этапе происходит получение и формирование корректирующей информации для навигационных сигналов КА ГЛОНАСС и GPS, непрерывный анализ качества рассчитанной и передаваемой корректирующей информации, выдача корректирующей информации в реальном масштабе времени в устройство для передачи дифференциальных поправок в канал передачи корректирующей информации, на пятом этапе происходит определение координат ККС в режиме накопления с постобработкой данных.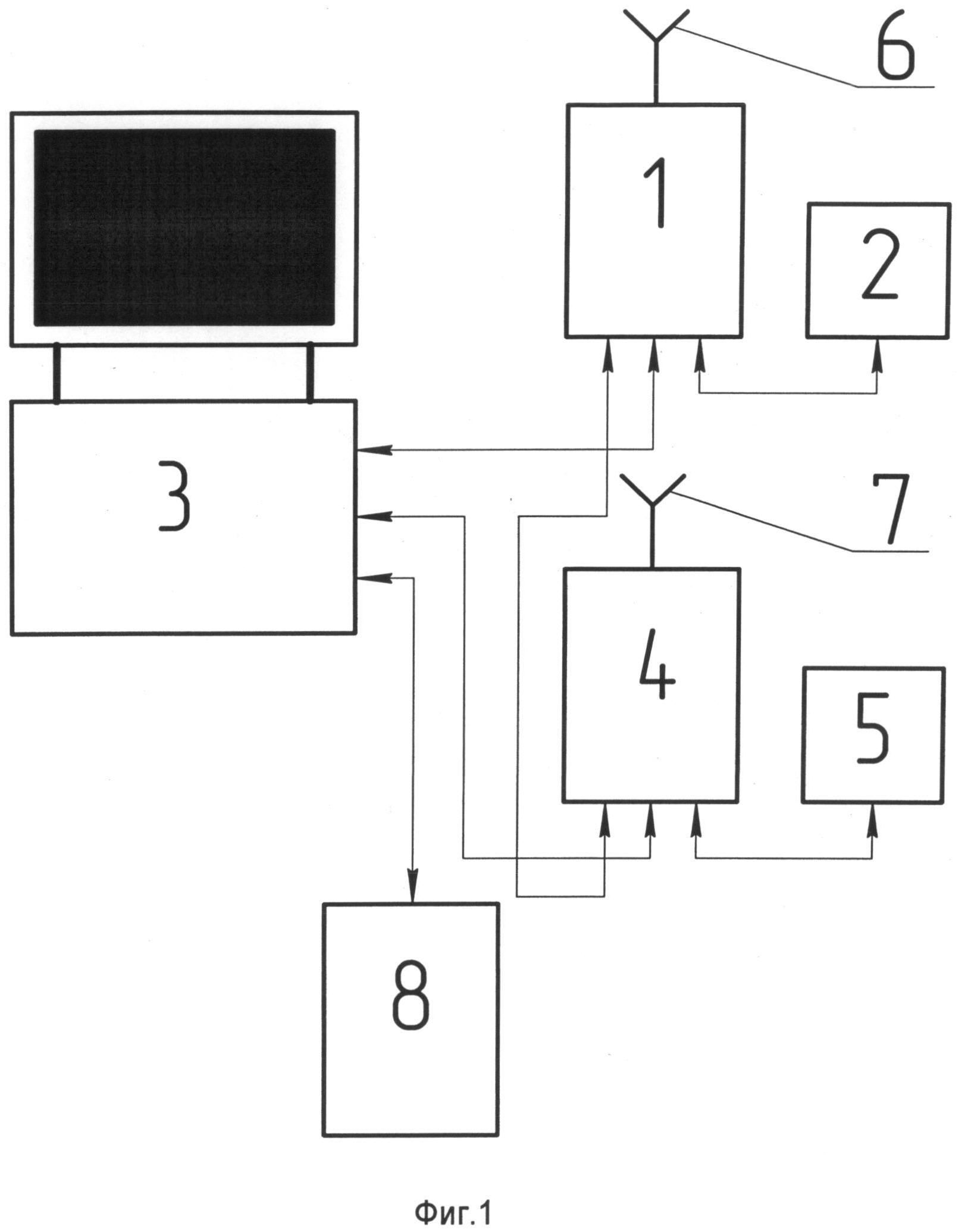
Способ изготовления цилиндрических оболочек
Способ изготовления ствола автоматического стрелкового оружия
Термошкаф
Спусковой механизм с предупреждением для огнестрельного оружия
Прибор для измерения внутренних диаметров колец малой жесткости
Способ изготовления колец
Механизм перевода рукоятки привода управления запуском ракеты индивидуального использования
Теплогенератор для нагрева жидкости
Стенд для испытания стволов стрелкового оружия
Привод тормозной системы транспортного средства
Устройство для защиты оптического прибора машины топопривязки
Модуль управления мобильного комплекса топогеодезической привязки
Стрелковое оружие
Механизм подъема антенны
Механизм отражения стрелкового оружия
Способ автоматизированного определения навигационно-топогеодезических параметров
Осколочно-фугасная боевая часть

