Результат интеллектуальной деятельности: СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ
Вид РИД
Изобретение
Изобретение относится к военной технике, а именно к способам функционирования систем топопривязки и навигации в условиях боевого применения, и может быть использовано для решения задач топогеодезической подготовки боевых действий ракетных войск и артиллерии Сухопутных войск, разведывательных средств.
Известен способ функционирования мобильного комплекса навигации и топопривязки в условиях боевого применения (см. патент №2436042 C1, G01C 21/00, опубл. 10.12.11 г.), принятый за прототип. Способ включает в себя выполнение операции подготовки к выполнению боевой (учебной) задачи, проведение ориентирования на начальной точке - определение дирекционного угла и координат начальной точки, архивирование полученных на привязываемых точках топогеодезических данных, перемещение к конечной (привязываемой) точке, нанесение маршрута движения и дополнительных ориентиров на топографическую карту, определение погрешности координат конечной (привязываемой) точки, проведение топогеодезической привязки ориентиров на местности и огневых позиций орудий или ракетных установок, доклад командованию и передачу результатов привязки обслуживаемым подразделениям. Подготовка комплекса к выполнению боевой (учебной) задачи после выполнения стандартных операций по включению аппаратуры заключается в приведении навигационной аппаратуры комплекса, неподвижно установленного на начальной точке, в автоматизированный режим «Навигация», проведение ориентирования автошасси комплекса на начальной точке заключается в выборе первой задачи режима навигации - задачи «Начальная установка», в ходе которой определяются используемые источники навигационной информации об азимуте α и начальных значениях координат X, Y, Н: инерциальная навигационная система или аппаратура спутниковой навигации, или обобщенные данные от совместном их использование, или данные, определенные с помощью автономных приборов, архивирование топогеодезических данных в процессе работы комплекса производится автоматически в виде электронных каталогов (списков), перемещение комплекса к конечной (привязываемой) точке осуществляется после выполнения предыдущей задачи и появления оперативного сообщения о готовности к выполнению второй задачи режима навигации - задачи «Работа» на маршруте, при выполнении второй задачи навигации в реальном режиме времени на цифровой карте местности (ЦКМ) автоматически отображаются значения текущих навигационных параметров и данные местоположения комплекса, после перехода комплекса к выполнению второй задачи навигации осуществляется параллельное выполнение следующего автоматизированного режима работы комплекса - режима «ЦКМ», основной задачей которого является задача «Прокладка маршрута», которая выполняется при помощи активизации одной из трех подзадач: «Выбор маршрута по текущим координатам», «Выбор маршрута по вводимым координатам», «Выбор маршрута из списка» - предварительно подготовленному электронному каталогу (списку) навигационных данных, определение погрешности азимута и координат места комплекса осуществляется автоматически за счет интегрированной обработки навигационной информации, поступающей от инерциальной навигационной системы и аппаратуры спутниковой навигации, передача результатов привязки производится по автоматизированному каналу информационного обмена системы связи и передачи данных с пунктами управления вышестоящих и взаимодействующих формирований с учетом приоритетов абонентов, как во время движения по маршруту, так и на остановке на привязываемых точках, по завершении топогеодезической привязки непосредственно на комплексе выполняется печатное изготовление необходимого количества топографических карт с нанесенной на них топогеодезической информацией.
Недостатками способа функционирования расчета топопривязчика в боевых условиях, взятого за прототипа, являются:
- недостаточная наглядность и ограниченный перечень отображаемых текущих параметров;
- ограниченный перечень решаемых задач, сужающий возможности по использованию системы на комплексах вооружений различного функционального назначения.
Предлагаемым изобретением решается задача по повышению эффективности топогеодезического обеспечения Сухопутных войск.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа функционирования системы топопривязки и навигации, оснащенной современными аппаратными средствами, в условиях боевого применения, определяющего оптимальный алгоритм ее функционирования и обеспечивающего с высокой степенью автоматизации выполнение комплекса мероприятий по топогеодезическому обеспечению НТС, на котором установлена система, при выполнении экипажем задач боевому назначению.
Указанный технический результат достигается тем, что в предлагаемом способе функционирования системы топопривязки и навигации (СТН) в условиях боевого применения, включающем в себя выполнение операции подготовки к выполнению боевой (учебной) задачи, проведение ориентирования на начальной точке, выполнение задач в режиме «Навигация», архивирование топогеодезических данных, выполнение задач в режиме «ЦКМ», передачу результатов привязки по автоматизированному каналу информационного обмена системы связи и передачи данных (ССПД) с пунктами управления вышестоящих и взаимодействующих формирований, новым является то, что в состав выполняемых системой топопривязки и навигации операций введены следующие режимы и задачи работы программно-аппаратного комплекса: режим «Состояние», выполненный с возможностью отображения при активации задачи «Индикация» информации о готовности системы к работе и выбранной системе координат, отображения текущих данных наземного транспортного средства (НТС) по данным бесплатформенной инерциальной навигационной системы (БИНС-ТП), аппаратуры спутниковой навигации (АСН), отображения текущего состояния доплеровского датчика скорости (ДДС) и универсального механического датчика скорости (МДС), отображения текущих данных НТС по данным системы определения высоты (СОВ), задача «Вычисление поправки для работы с визиром», выполненная с возможностью определения поправки для работы с визиром и производимая в режиме «Техническое обслуживание», режим «Привязка АП», выполненный с возможностью определения взаимного расположения акустических пеленгаторов (АП), входящих в состав НТС.
Введение в состав выполняемых операций режима работы программно-аппаратного комплекса системы «Состояние» позволяет:
- обеспечить отображение информации о текущем состоянии системы и сборочных единиц;
- обеспечить отображение информации о готовности и выбранной системе координат;
- обеспечить отображение информации о текущих данных НТС по данным бесплатформенной инерциальной навигационной системы (БИНС-ТП): координаты X, Y, дирекционный угол продольной оси НТС α, поперечный ψ (крен) и продольный φ (тангаж) углы наклона, текущий пройденный путь S, режим работы бесплатформенной инерциальной навигационной системы (БИНС-ТП);
- обеспечить отображение информации в разделе АСН: координат X, Y, высоты Н, средней квадратической ошибки СКО, состояния АСН;
- обеспечить отображение информации в разделах ДДС и МДС о текущем состояния ДДС и МДС;
- обеспечить отображение информации в разделе СОВ о текущих данных НТС по данным СОВ - высоты НТС Н.
Введение в состав выполняемых операций задачи «Вычисление поправки для работы с визиром» позволяет обеспечить определение поправки для работы с визиром.
Введение в состав выполняемых операций режима «Привязка АП» позволяет обеспечить определение взаимного расположения акустических пеленгаторов, входящих в состав НТС.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежами, где на фиг.1 показан алгоритм функционирования системы навигации и топопривязки; на фиг.2 - рабочее окно оператора задачи «Индикация» в режиме «Состояние»; на фиг.3 - рабочее окно оператора задачи «Вычисление поправки для работы с визиром» в режиме «Тех. обслуживание»; на фиг.4 - рабочее окно оператора с результирующим значением поправки; на фиг.5 - рабочее окно оператора режима «Привязка АП»; на фиг.6 - схема задачи «Привязка АП».
Эксплуатационный алгоритм функционирования системы топопривязки и навигации определяется руководящими документам по организации и работе топогеодезических подразделений Сухопутных войск и эксплуатационными документами на НТС, на котором установлена система. Исходя из этого, на систему топопривязки и навигации возлагается решение следующих задач по топогеодезической подготовке войск:
- рекогносцировка маршрута и нанесение дорог на карту;
- вождение колонн по заданному маршруту;
- обеспечение частей и подразделений ракетных войск и артиллерии походными топогеодезическими данными, дирекционными углами ориентирных и эталонных направлений;
- топогеодезическая привязка огневых и стартовых позиций, постов и пунктов наблюдения;
- создание артиллерийских топогеодезических сетей;
- контроль топогеодезической привязки, выполненной расчетами артиллерийских подразделений.
В соответствии с поставленными задачами технология работ с системой топопривязки и навигации в условиях боевого применения осуществляется в соответствии со следующим алгоритмом.
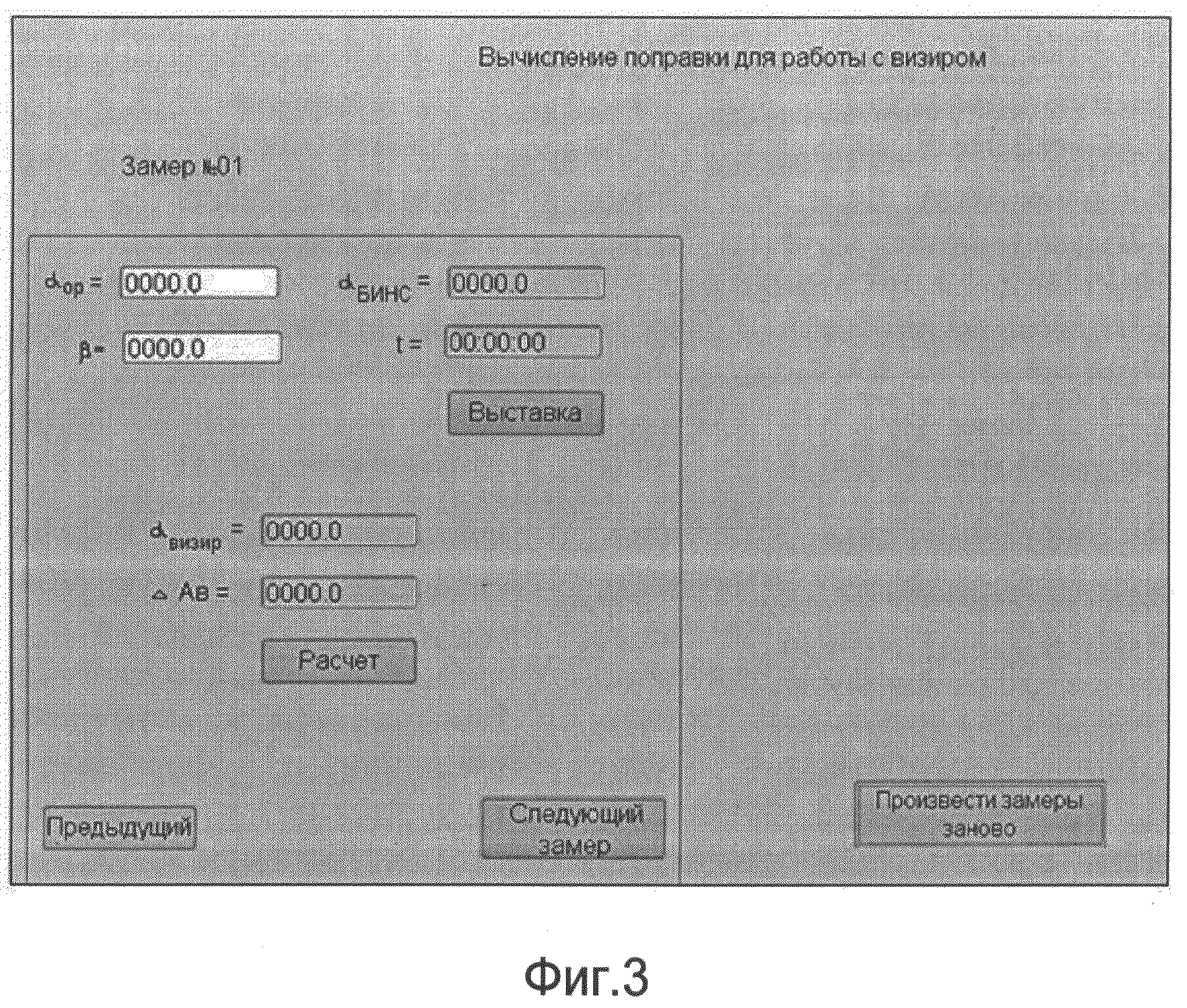
1. Для подготовки выполнения системой топопривязки и навигации задач по назначению необходимо определить поправку для работы с визиром. Для этого предназначена задача «Вычисление поправки для работы с визиром», выполняемая в режиме «Тех. обслуживания». В окне (см. фиг.3) необходимо ввести дирекционный угол ориентированного направления αОР (значение из каталога) и угол ориентированного направления β, определенный с помощью визира, нажать кнопку «Выставка», начнется обратный отсчет времени, по истечении которого отобразится дирекционный угол, определенный с помощью БИНС-ТП αБИНС. Далее необходимо нажать кнопку «Расчет», на экране появятся значения дирекционного угла линии визирования αВИЗИР, и поправки для работы с визиром ΔAВ.
Далее необходимо нажать кнопку «Следующий замер», повторить описанное выше для других ориентированных направлений. При нажатии кнопки «Предыдущий» происходит возврат в предыдущее окно для возможности проверки правильности ввода данных и, при необходимости, их коррекции с проведением повторного замера.
Для вычисления поправки необходимо нажать кнопку «Завершить», на экране появится значение ΔAВСР, вычисленное как среднее по результатам всех замеров. Для установки определенной ΔAВСР в качестве формулярного значения нажать кнопку «Установить поправку», автоматически отобразится рабочее окно подзадачи «Поправки» (см. фиг.4), с сохранененным значением ΔAВСР.
2. Получение и уяснение задачи командиром НТС, на котором установлена система топопривязки и навигации, постановка задачи экипажу.
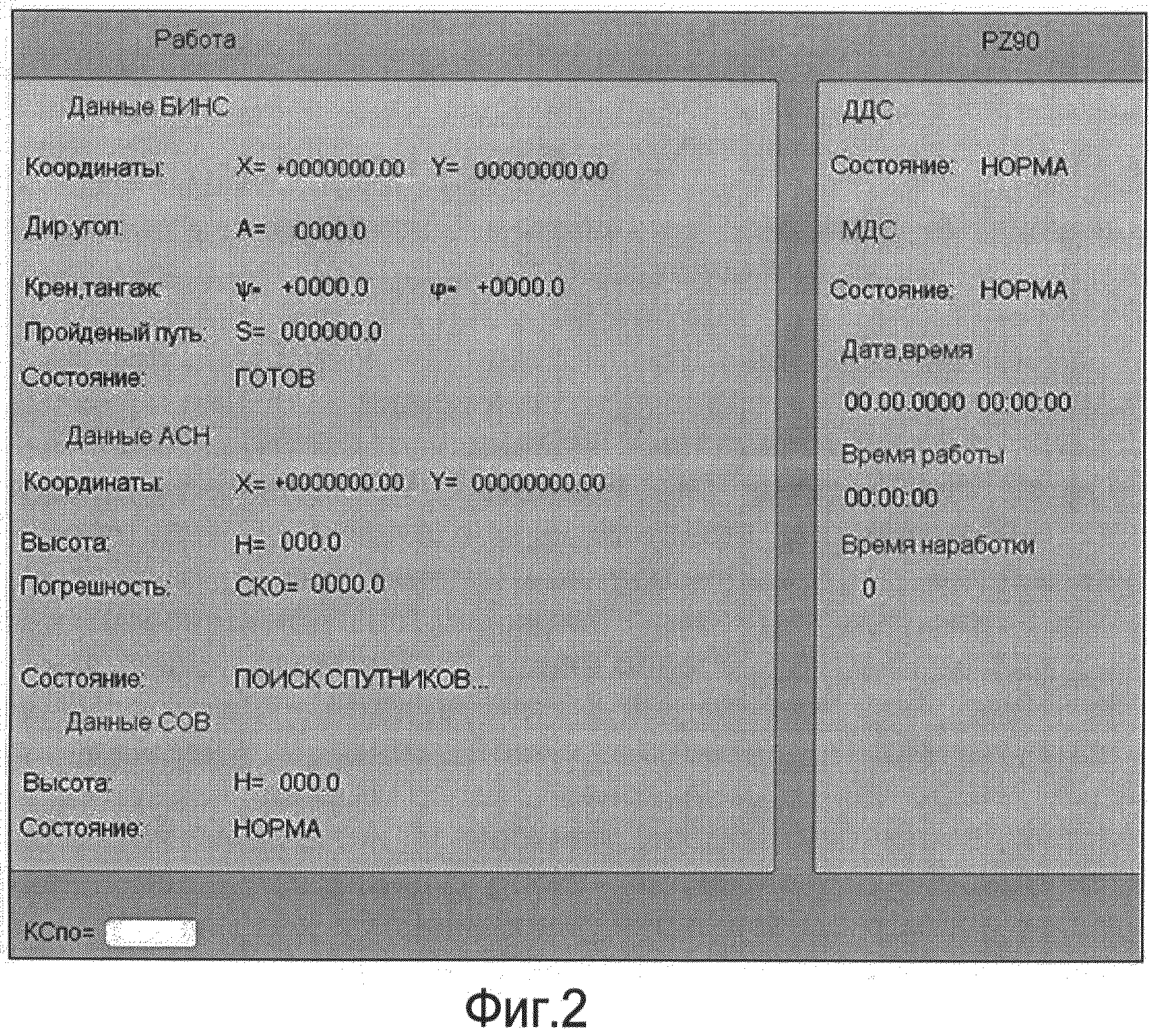
3. Ориентирование НТС на начальной точке. После ввода начальных данных система автоматически переходит в режим «Состояние». При активации режима «Состояние» и задачи «Индикация» выводится рабочее окно (см. фиг.2). В верхней строчке окна задачи «Индикация» выводятся сообщение о готовности и выбранная система координат.
В разделе «БИНС» отображаются текущие данные НТС по данным БИНС-ТП: координаты X, Y, дирекционный угол продольной оси НТС α, поперечный ψ (крен) и продольный φ (тангаж) углы наклона, текущий пройденный путь S, режим работы БИНС-ТП.
В разделе «АСН» отображаются текущие данные НТС по данным АСН: координаты X, Y, высота Н, СКО, состояние АСН.
В разделах «ДДС» и «ДСМ» отображаются текущие состояния ДДС и УМДС.
В разделе «СОВ» отображаются текущие данные НТС по данным СОВ: высота НТС Н, состояние СОВ.
Также в режиме «Состояние» отображаются текущие дата и время в формате «ДД.ММ.ГГГГ ЧЧ:ММ:СС», где «ДД», «ММ», «ГГ» - поля отображения дня, месяца, года, «ЧЧ», «ММ», «СС» - поля отображения часов, минут, секунд, время работы системы, общее время наработки.
3. Функционирование системы топопривязки и навигации на маршруте в составе НТС.
4. Выполнение режима ЦКМ, предназначенного для работы с цифровыми картами местности.
5. Передача результатов топопривязки по автоматизированному каналу информационного обмена ССПД с пунктами управления вышестоящих и взаимодействующих формирований.
6. Печатное изготовление необходимого количества карт с навигационной информацией. Далее проводится распределение топографического материала между взаимодействующими подразделениями.
7. Дополнительно при оснащении НТС, на котором установлена система топопривязки и навигации, акустическими пеленгаторами выполняется режим «Привязка АП».
Режим «Привязка АП» предназначен для определения взаимного расположения акустических пеленгаторов, входящих в НТС.
Режим «Привязка АП» обеспечивает выполнение расчетной задачи по определению топогеодезической привязки АП (см. фиг.5) по исходным данным, полученным с помощью приборов, входящих в состав НТС. Для просмотра схемы взаимного расположения АП необходимо нажать кнопку «Посмотреть схему», при этом выводится рабочее окно (см. фиг.6). Для решения задачи необходимо ввести входные данные и нажать кнопку «Расчет», на экране появятся выходные данные.
Для нанесения результатов расчета на ЦКМ необходимо нажать кнопку «Отобразить на карте», при этом появится окно с ЦКМ и результатами привязки.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа функционирования системы топопривязки и навигации, оснащенной современными аппаратными средствами, в условиях боевого применения, определяющего оптимальный алгоритм ее функционирования и обеспечивающего с высокой степенью автоматизации выполнение комплекса мероприятий по топогеодезическому обеспечению НТС, на котором установлена система, при выполнении экипажем задач по боевому назначению.
Способ функционирования системы топопривязки и навигации (СТН) в условиях боевого применения, включающий в себя выполнение операции подготовки к выполнению боевой (учебной) задачи, проведение ориентирования на начальной точке, выполнение задач в режиме «Навигация», архивирование топогеодезических данных, выполнение задач в режиме «ЦКМ», передачу результатов привязки по автоматизированному каналу информационного обмена системы связи и передачи данных (ССПД) с пунктами управления вышестоящих и взаимодействующих формирований, отличающийся тем, что в состав выполняемых системой топопривязки и навигации операций введены следующие режимы и задачи работы программно-аппаратного комплекса: режим «Состояние», выполненный с возможностью отображения при активации задачи «Индикация» информации о готовности системы к работе и выбранной системе координат, отображения текущих данных наземного транспортного средства (НТС) по данным бесплатформенной инерциальной навигационной системы (БИНС-ТП), аппаратуры спутниковой навигации (АСН), отображения текущего состояния доплеровского датчика скорости (ДДС) и универсального механического датчика скорости (МДС), отображения текущих данных НТС по данным системы определения высоты (СОВ), задача «Вычисление поправки для работы с визиром», выполненная с возможностью определения поправки для работы с визиром и производимая в режиме «Техническое обслуживание», режим «Привязка АП», выполненный с возможностью определения взаимного расположения акустических пеленгаторов, входящих в состав НТС.
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы

