Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С НИМ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области космической техники, а именно, к области лазерных локационных систем (ЛЛС), используемых для обеспечения сближения космических аппаратов (КА).
В общем случае ЛЛС включает в себя источник лазерного излучения, фотоприемник, передающую и приемную оптические системы, блок выдачи информации [1].
Поиск ЛЛС пассивного объекта в заданном секторе пространства является сложной задачей. Для облегчения процесса наведения на объект могут быть использованы дополнительные технические средства - размещение на пассивном объекте лазерного маяка и установка на активном КА пассивных широкоугольных датчиков [2].
Однако установка на пассивном КА лазерных маяков, являющихся активными излучающими устройствами приводит к снижению надежности, а использование дополнительных пассивных датчиков на активном КА нежелательно из-за увеличения веса и энергопотребления. Использование только одной сканирующей ЛЛС на активном КА позволяет значительно упростить состав аппаратуры и повысить надежность.
Для поиска и обнаружения ЛЛС пассивного объекта необходимо производить последовательный просмотр области целеуказания узким сканирующим полем по определенным траекториям. Перемещение приемопередающей системы может осуществляться по различным законам [1].
В известных технических решениях выбор траектории сканирования ЛЛС производится в зависимости от формы области целеуказания, заданного времени обзора, конструктивных возможностей реализации, а также вероятностей обнаружения цели в различных участках области. Принципы формирования поисковых траекторий и алгоритмов сканирования в режиме обнаружения объекта локации посвящен ряд работ [3, 4, 5]. Наиболее распространенные траектории сканирования - спиральная и строчная [1].
Строчное сканирование является распространенным видом обзора области целеуказания прямоугольной формы. При этом скорость поступательного перемещения оптической оси вдоль одной координаты превышает скорость ее перемещения вдоль другой.
Известен способ сканирования ЛЛС, заключающийся в построчном сканировании [6] области целеуказания сколлимированным лазерным лучом синхронно с узким полем зрения приемника посредством двух сканирующих зеркал. ЛЛС может излучать как в непрерывном, так и в импульсном режиме.
В таких ЛЛС для обеспечения требуемого темпа просмотра области целеуказания используется высокая частота повторения зондирующих импульсов, что приводит к расширению спектра сигнала и ухудшению отношения сигнал/шум [3, 7].
Известен способ сканирования ЛЛС с помощью плоского луча, т.н. «ножевой» диаграммы направленности, освещающего одним зондирующим импульсом сразу целую строку в области целеуказания [8]. Сканирование по строке осуществляется с помощью вращающегося зеркала и щелевой диафрагмы.
Недостатком аналогов является использование оптико-механического сканирования. Трудности заключаются в ограниченных значениях скоростей движения сканирующих элементов, их износе в процессе эксплуатации и ограниченном сроке службы. Также серьезной технической проблемой является обеспечение надежности движущихся и вращающихся деталей в условиях космического вакуума.
Известен способ обнаружения объекта, заключающийся в определении одной координаты сканированием по горизонтали «ножевой» диаграммой и определении второй координаты сканированием коллимированной диаграммой зондирующего излучения ЛЛС, при котором упомянутая ЛЛС установлена на опорно-поворотной платформе, за счет вращения которой выполняется сканирование [9].
Недостатком данного решения является выполнение сканирования в двух плоскостях для обнаружения объекта. Трудности заключаются в дополнительном времени, необходимом на последовательное сканирование двумя диаграммами излучения, необходимости использования двух источников излучения и передающих оптических систем.
Задачей изобретения является увеличение скорости, и как следствие, уменьшение времени сканирования, упрощение операции обнаружения пассивного космического объекта, повышение надежности за счет исключения оптико-механического сканирования с использованием движущихся деталей в условиях космического полета.
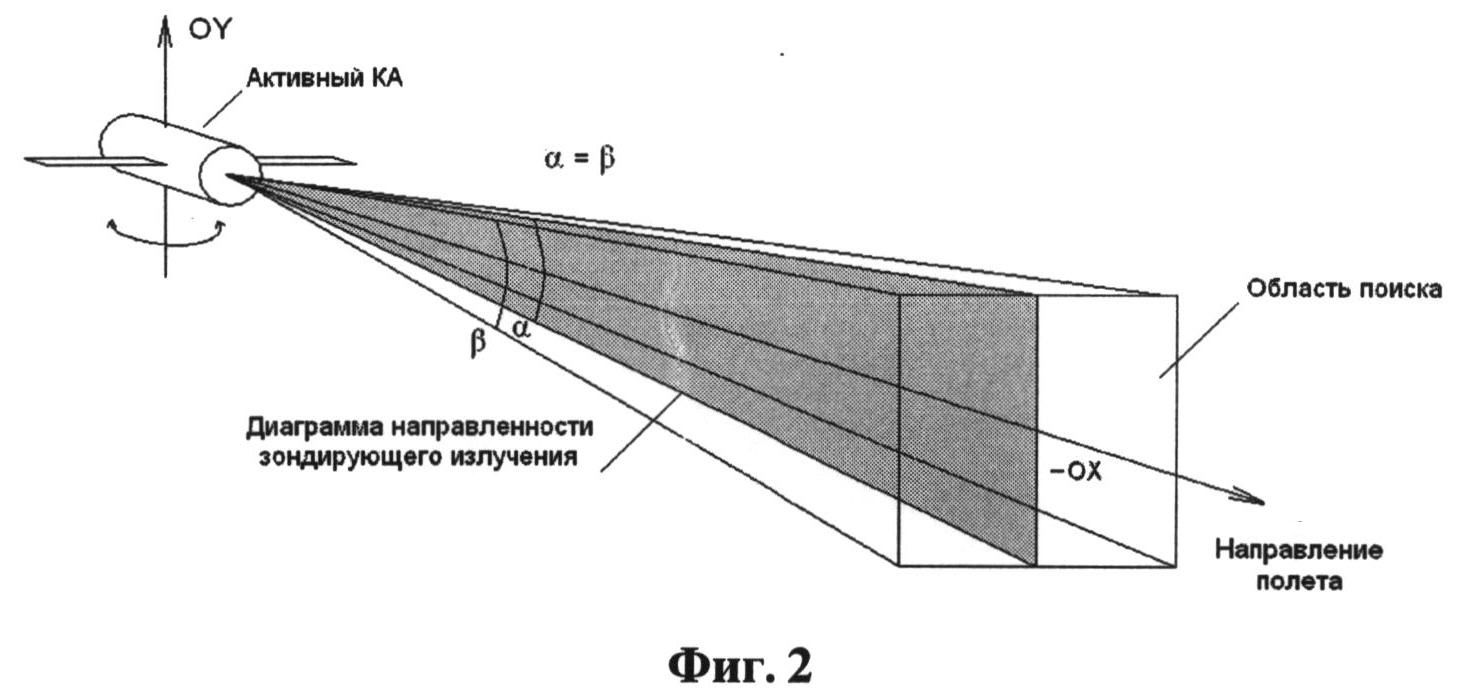
Задача решается тем, что сканирование производится путем разворота активного КА с жестко установленной упомянутой лазерной локационной системой по каналу тангажа или курса до обнаружения пассивного космического объекта, при этом ширина диаграммы зондирующего излучения лазерной локационной системы в направлении сканирования минимальная, в перпендикулярном направлении угол расходимости равен угловому размеру зоны обзора, а обнаружение космического объекта осуществляют в мгновенном поле зрения многоэлементного приемника излучения лазерной локационной системы, совпадающим с диаграммой направленности зондирующего излучения лазерной локационной системы, одновременно с вышеупомянутым сканированием.
Если пассивный объект находится в пределах зоны обзора, то он попадет в поле зрения ЛЛС за время разворота активного КА по тангажу (Фиг.1) или курсу (Фиг.2) на угол, равный угловой величине области целеуказания. После обнаружения и определения координат пассивного объекта можно закончить разворот активного КА и выполнить наведение оптической оси зондирующей диаграммы ЛЛС на пассивный объект для облегчения его сопровождения. Наведение на пассивный объект производится по информации, поступающей из ЛЛС в бортовые системы активного КА.
Данный способ может использоваться для обнаружения как кооперируемых объектов, так и некооперируемых.
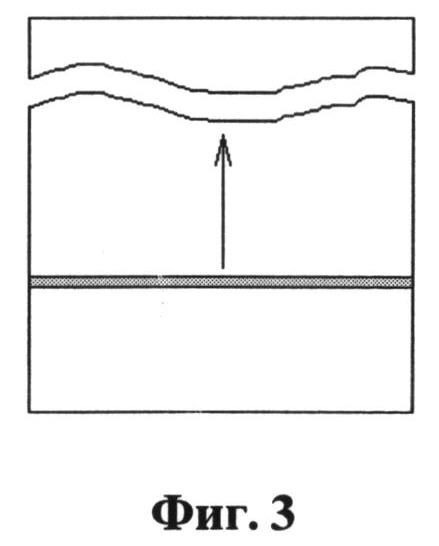
Область целеуказания имеет форму прямоугольника (Фиг.3). Одна сторона прямоугольника области целеуказания определяется шириной луча зондирующего излучения ЛЛС. Вторая сторона прямоугольника зоны целеуказания определяется углом разворота КА.
Для получения соответствующей диаграммы направленности используется оптическая анаморфотная система. Особенностью анаморфотной системы является то, что в меридиональной и сагиттальной плоскости ее фокусные расстояния имеют различные значения. Для этого в анаморфотной системе обычно используются цилиндрические линзы.
В одной плоскости оптическая система представляет собой широкоугольный объектив с полем зрения, равным угловому размеру области целеуказания (например, для величины 30° это объектив типа «Зенитар», «Пентар-35», или «Телемар-17»), а в другой - набор плоскопараллельных пластин.
Используется многоэлементный приемник излучения - линейка фотоприемников (например, линейка ПЗС или линейка фотодиодов), поле зрения которого равно угловой величине зондирующего луча ЛЛС.
Первая угловая координата пассивного космического объекта определяется по углу разворота активного КА с жестко установленной ЛЛС а вторая определяется по номеру засвечиваемого элемента в приемнике излучения в момент прихода отраженного сигнала во время сканирования.
После обнаружения и определения координат пассивного объекта для его сопровождения может использоваться дополнительный излучающий узконаправленный канал, входящий в штатный состав ЛЛС. В режиме сопровождения сканирование в пределах малых углов (достаточное для того, чтобы избежать срыва сопровождения и выхода объекта из поля зрения) может также выполнятся с помощью акусто- или электрооптических дефлекторов, что позволяет и на этом этапе отказаться от движущихся механических деталей.
Основным преимуществом предлагаемого способа обзора пространства является увеличение скорости обзора, и как следствие, меньшее время на обзор области целеуказания.
Например, многоцелевая ЛЛС для стыковки КА [10, 11] осуществляла поиск в области целеуказания 30°×30° методом дискретного построчного сканирования. Область разбивалась на 376×376 элементов, а зондирующий пучок с диаграммой излучения 0,1°×0,1 последовательно перемещался от одного элемента к другому. Перемещение пучка происходило дискретно и осуществлялось сканирующей системой на пьезоэлектрических приводах, в каждый элемент области посылался один зондирующий импульс, при этом диаграмма направленности излучения в двух соседних положениях перекрывалась на 25%. Полное время обзора области целеуказания составляло 141,4 с при частоте повторения зондирующих импульсов 1 кГц. Увеличение скорости сканирования должно также сопровождаться возрастанием частоты повторения зондирующих импульсов излучения, что предъявляет дополнительные требования к источнику излучения (например, по тепловому режиму).
При решении задачи сближения двух КА важно количество времени, затрачиваемое на обнаружение объекта в космическом пространстве, чтобы своевременно определить и скорректировать траекторию движения КА, исключив при этом столкновение и промах мимо пассивного КА.
При величине скорости разворота КА по тангажу или курсу 0,021 рад/с полный обзор области целеуказания 30°×30° (1,1 ср) займет 25 с.
Предлагаемый способ сканирования по кадру разворотом КА по тангажу или курсу также имеет следующие преимущества. У некоторых типов КА имеется аппаратура спутниковой навигации (АСН), антенны которой должны видеть спутники, находящиеся в верхней полусфере. Разворот по крену на угол до 180° может привести к потере видимости навигационных спутников. Поскольку в предлагаемом способе сканирования размер зоны обзора по кадру зависит только от угла разворота КА, он может быть легко изменен в меньшую сторону для уменьшения времени поиска цели, или в большую сторону при увеличенных погрешностях выведения активного КА в зону включения ЛЛС.
В конструкции может быть использован один или несколько твердотельных лазеров с диодной накачкой, волоконных лазеров, полупроводниковых лазеров.
Использование широкой диаграммы направленности зондирующего излучения может привести к уменьшению мощности сигнала, отраженного от объекта локации, что, в свою очередь, снижает дальность действия ЛЛС. Поэтому для обоснования возможности практической реализации проведем оценку возможностей ЛЛС.
Исходные данные: угловой размер области целеуказания равен 30°; ЛЛС излучает в импульсном режиме, ширина диаграммы излучения в направлении сканирования равна 0,001 рад; таким образом, сканирование осуществляется диаграммой 3'26×30° (5,24·10-4 ср); мощность зондирующего импульса составляет 200000 Вт.
Время на поиск цели принимается равным 5 с, угловая скорость вращения активного КА по крену составляет 0,021 рад/с. Частота повторения зондирующих импульсов f в таком случае должна быть не меньше 21 Гц. Частота повторения зависит от допустимого времени обзора одного элемента области целеуказания. Это время определяется числом зондирующих импульсов, необходимых для обнаружения с достаточной вероятностью объекта локации. Для надежной работы ЛЛС желательно, чтобы при каждом сканировании на цель попадало не менее пяти зондирующих импульсов [12]. В этом случае частота повторения должна быть не менее f=105 Гц. Если на поиск пассивного объекта выделяется 10 с, то тогда достаточно f=53 Гц.
Эффективная поверхность рассеяния пассивного объекта (пассивного КА) составляет Sоб=15 м2; коэффициент отражения ρоб=0,8; предполагается что корпус объекта рассеивает падающее излучение по закону Ламберта.
Предельная дальность импульсной дальномерной системы может быть приближенно оценена по формуле:
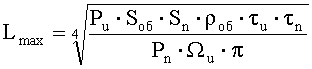 ;
;
где Рu=200000 Вт - мощность зондирующего излучения; Рn=10-12 Вт - минимальная принимаемая мощность отраженного сигнала; Ωu=5,24·10-4 ср - телесный угол, в котором распространяется зондирующий импульс; Sn=2,83·10-3 м - площадь апертуры приемной оптики (соответствует диаметру входного зрачка 6 см); τu=τn=0,5 - коэффициенты пропускания передающего и приемного оптических трактов.
Дальность обнаружения пассивного объекта на фоне космоса составит Lmах=31869 м.
Таким образом, обеспечивается надежность за счет отказа от оптико-механического сканирования, что повышает вероятность выполнения программы полета КА. Использование предлагаемого способа сканирования ЛЛС для обеспечения сближения, должно быть увязано с возможностями систем управления КА, с точки зрения динамических возможностей и расхода рабочего тела.
Литература:
1. Малашин М.С., Каминский Р.П., Борисов Ю.Б. Основы проектирования лазерных локационных систем. - М.: Высшая школа, 1983. - 207 с.
2. Старовойтов Е.И. Использование лазерных систем в решении задачи встречи КА на орбите Луны // Авиакосмическое приборостроение. - 2010. - №11. - С.12-17.
3. Катыс Г.П. Восприятие и анализ оптической информации автоматической системой. - М.: Машиностроение, 1986. - 416 с.
4. Пустынский И.Н., Слободян С.М. Диссекторные следящие системы. - М.: Радио и связь, 1984. - 136 с.
5. Слободян С.М. Анализ и оптимизация телевизионного принципа сканирования фазового пространства оптическим фазометром: 1. Поисковые траектории // Известия Томского политехнического университета. - 2004. - Т.307, №6 - С.65-72.
6. Lamberts C.W. Active imaging system: a long-range scanned laser. - Appl. Opt, 1976, v.15, N 5, р.1284.
7. Катыс Г.П. Обработка визуальной информации. - М.: Машиностроение, 1990. - 320 с.
8. Пат. 4119379 МКИ G01С 3/08 (США).
9. Патент РФ RU (11) 2304792 (13) С1.
10. Flom T. Spacebome laser radar. - Appl. Opt, 1972, v.11, N 2, p.291
11. Flom Т., Coombes D. Multiple target tracking with a scanning laser radar. - Navigation, 1974-1975, v.21, N 4, p.298.
12. Росс М. Лазерные приемники. - М.: Мир, 1969.
Способ обнаружения пассивного космического объекта при сближении с ним активного космического аппарата, включающий сканирование путем разворота активного космического аппарата с жестко установленной лазерной локационной системой по каналу тангажа или курса до обнаружения пассивного космического объекта, при этом ширина диаграммы направленности зондирующего излучения лазерной локационной системы в направлении сканирования минимальная, в перпендикулярном направлении угол ее расходимости равен угловому размеру зоны обзора, а обнаружение космического объекта осуществляют в мгновенном поле зрения многоэлементного приемника излучения лазерной локационной системы, совпадающем с диаграммой направленности зондирующего излучения лазерной локационной системы, одновременно с вышеупомянутым сканированием.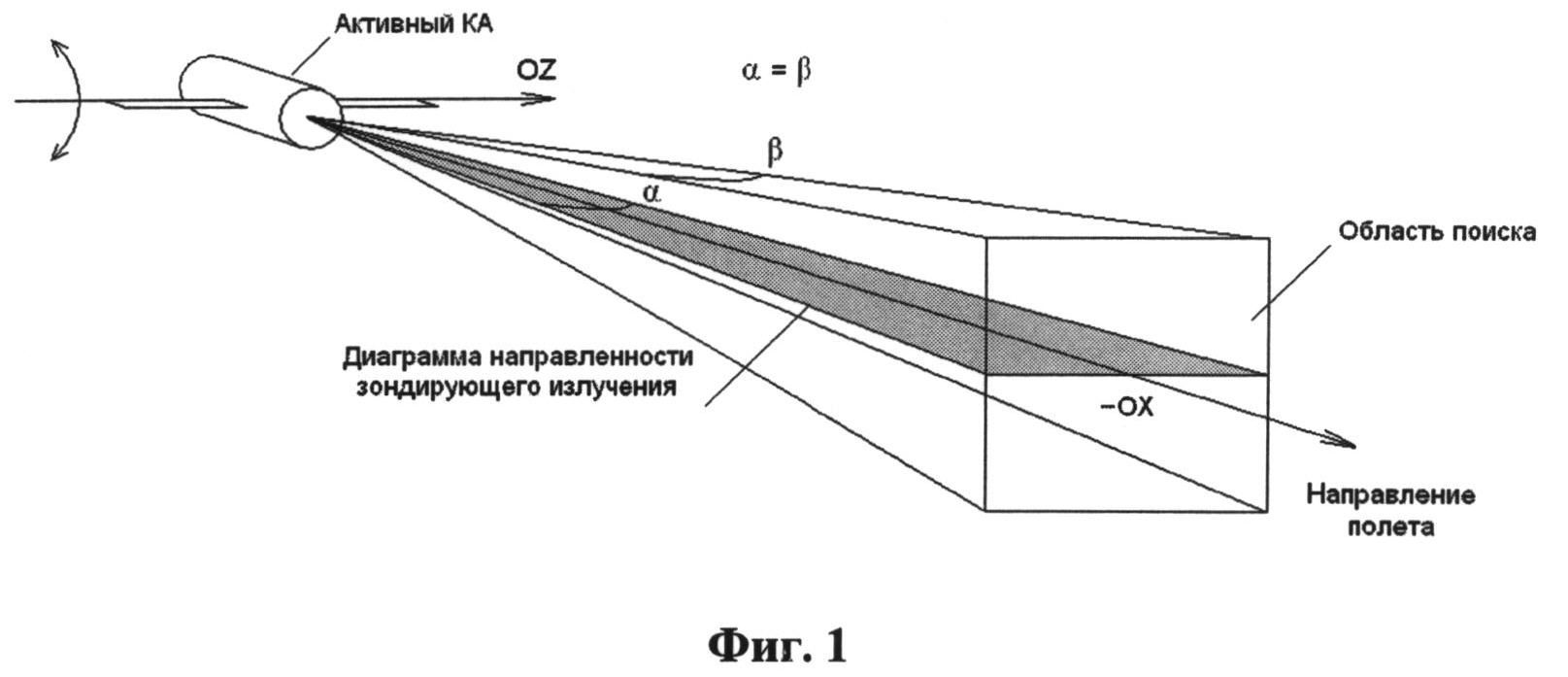
Способ определения деформации корпуса космического аппарата в полете
Устройство защиты и контроля состояния оптических поверхностей объектива оптического прибора
Электрохимический генератор
Устройство защиты и контроля состояния оптических поверхностей в фокальной плоскости объектива оптического прибора
Способ управления космическим аппаратом для облёта луны
Способ управления транспортной космической системой
Устройство крепления и расфиксации развертываемых панелей
Способ управления космическим аппаратом для облёта луны
Космический модуль
Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями
Способ управления транспортной космической системой
Импульсная реактивная двигательная установка космического аппарата
Способ полуавтоматического управления причаливанием
Способ определения момента времени схода наблюдаемого с космического аппарата ледника
Способ контроля готовности экипажа космического аппарата к нештатным ситуациям и система для его осуществления
Способ испытаний на электромагнитную совместимость электроракетной двигательной установки с информационными бортовыми системами космического объекта, системы записи и воспроизведения характеристик тока разряда электроракетных двигателей электроракетной установки для реализации способа
Способ определения деформации корпуса космического аппарата в полете
Устройство защиты и контроля состояния оптических поверхностей объектива оптического прибора
Электрохимический генератор
Устройство защиты и контроля состояния оптических поверхностей в фокальной плоскости объектива оптического прибора

