УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УСТАНОВОЧНОГО УГЛА ЭЛЕМЕНТА, СПОСОБНОГО ВРАЩАТЬСЯ ВОКРУГ ОСИ
Вид РИД
Изобретение
Область техники
Предлагаемое изобретение относится к устройству для определения установочного угла (превышающего 180°) элемента, способного вращаться или поворачиваться вокруг оси, согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
Из DE 10133492 А1 известно устройство для определения установочного угла элемента, способного вращаться или поворачиваться вокруг оси и имеющего форму ножной педали, постоянный магнит которой расположен относительно двух датчиков Холла таким образом, что колебательное движение ножной педали в одном направлении определяется одним датчиком Холла как положительное угловое перемещение, а движение в другом направлении определяется другим датчиком Холла как отрицательное угловое перемещение. При этом оба датчика Холла расположены по обеим сторонам полюсного шага кольцевого постоянного магнита, так что каждый датчик Холла удален от полюсного шага на угол <90°.
Таким образом, это известное устройство может определять и анализировать только ограниченный угол ±<90°. Для некоторых областей применения этого недостаточно.
Сущность изобретения
Поэтому задачей предлагаемого изобретения является разработка устройства вышеописанного рода для определения установочного угла элемента, способного вращаться или поворачиваться вокруг оси, которое может определить угол более 90° в том же направлении, в частности, угол более 180°.
Эта задача решается устройством вышеописанного рода для определения установочного угла элемента, способного вращаться или поворачиваться вокруг оси, с признаками, раскрываемыми в пункте 1 формулы изобретения.
Благодаря изобретению можно определять угол более 180°, так как по окружности кольцевого постоянного магнита распределены несколько датчиков. При этом используется сигнал того датчика Холла, который находится в наиболее благоприятной области своей характеристики, причем микроконтроллер или его электронная схема решает, какой из датчиков Холла в определенном угловом диапазоне считается активным и будет анализироваться. Таким образом, использование трех датчиков Холла вместо двух позволяет анализировать полный оборот вращающегося элемента на 360°. Исходя из сказанного, может быть предусмотрен дополнительный датчик, если анализ должен быть избыточным. Предпочтительный вариант критериев выбора датчика микроконтроллером следует из признаков, раскрываемых в пункте 2 и пункте 3 формулы изобретения.
Целесообразный вариант исполнения постоянного магнита имеет признаки, раскрываемые в пункте 4 формулы изобретения.
Целесообразный и выгодный с производственной точки зрения вариант исполнения устройства имеет признаки одного или нескольких из пунктов 5, 6, 7-11 формулы изобретения.
Примерный вариант исполнения элемента, способного вращаться или поворачиваться, имеет признаки, раскрываемые в пункте 12 формулы изобретения.
Выгодные варианты исполнения крепления датчика имеют признаки одного или нескольких из пунктов 13-18 формулы изобретения.
Признаки, раскрываемые в пунктах 19 и 20 формулы изобретения, позволяют упростить позиционирование датчиков Холла по сравнению с вариантом размещения каждого датчика Холла на отдельной плате.
Краткий перечень фигур чертежей
Прочие подробности изобретения следуют из приведенного ниже описания, в котором изобретение подробно поясняется на основании варианта исполнения, представленного на фигурах. Чертежи изображают:
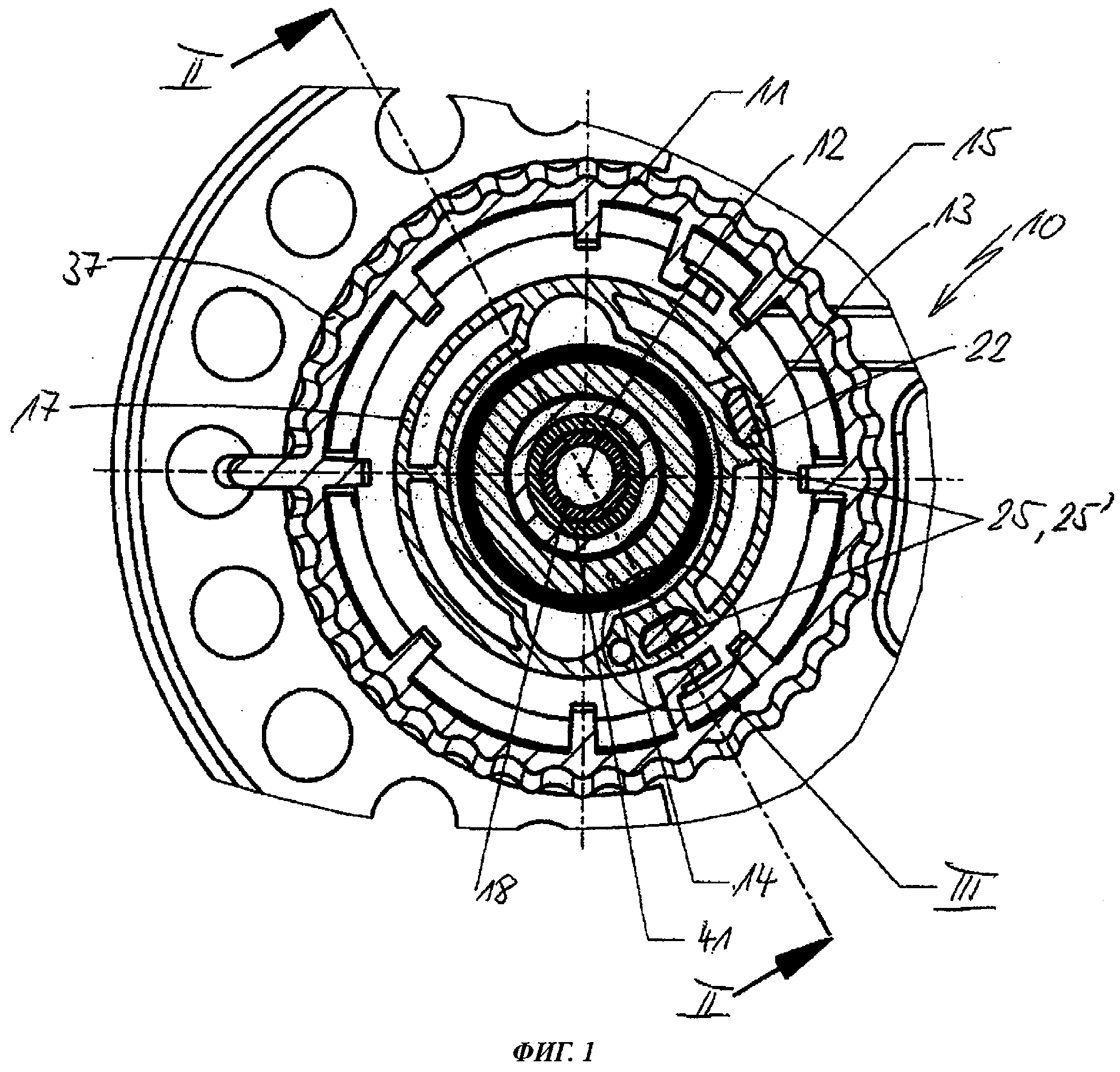
Фигура 1: устройство с двумя датчиками для определения установочного угла (превышающего 180°) элемента ввода, способного вращаться вокруг оси, согласно предпочтительному варианту исполнения предлагаемого изобретения; разрез по плоскости, параллельной проекции устройства, вдоль линии I-I, обозначенной на фигуре 2.
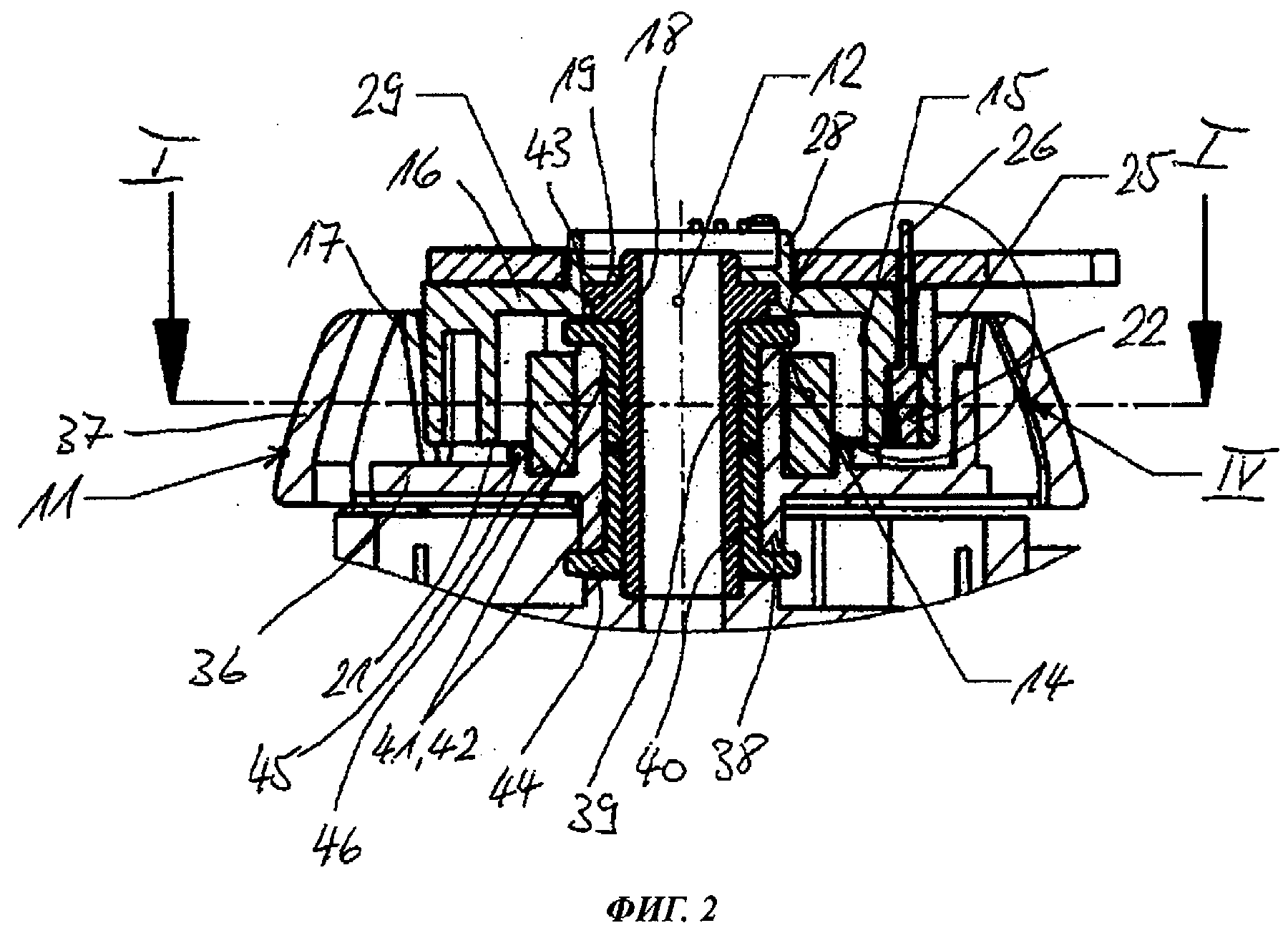
Фигура 2: разрез вдоль линии II-II, обозначенной на фигуре 1.
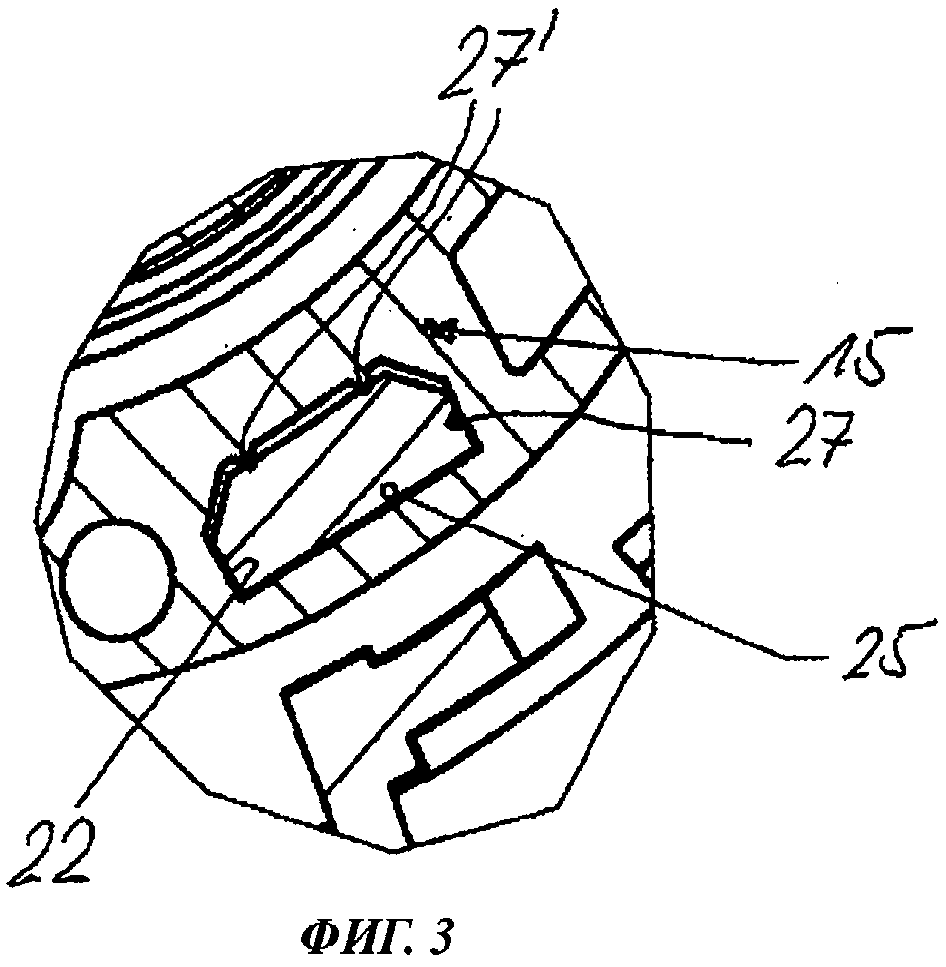
Фигура 3: увеличенный фрагмент, обозначенный контуром III на фигуре 1.
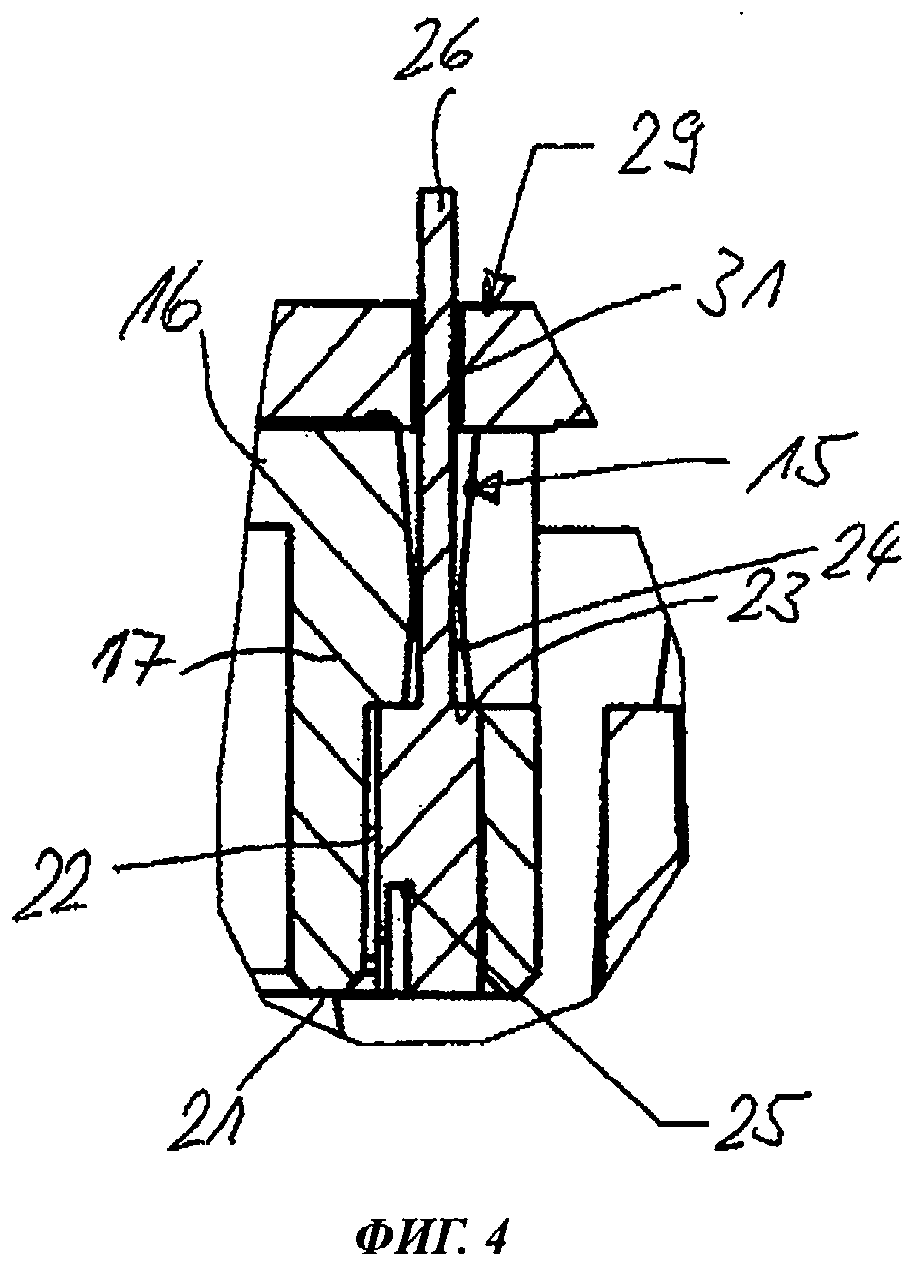
Фигура 4: увеличенный фрагмент, обозначенный контуром IV на фигуре 2.
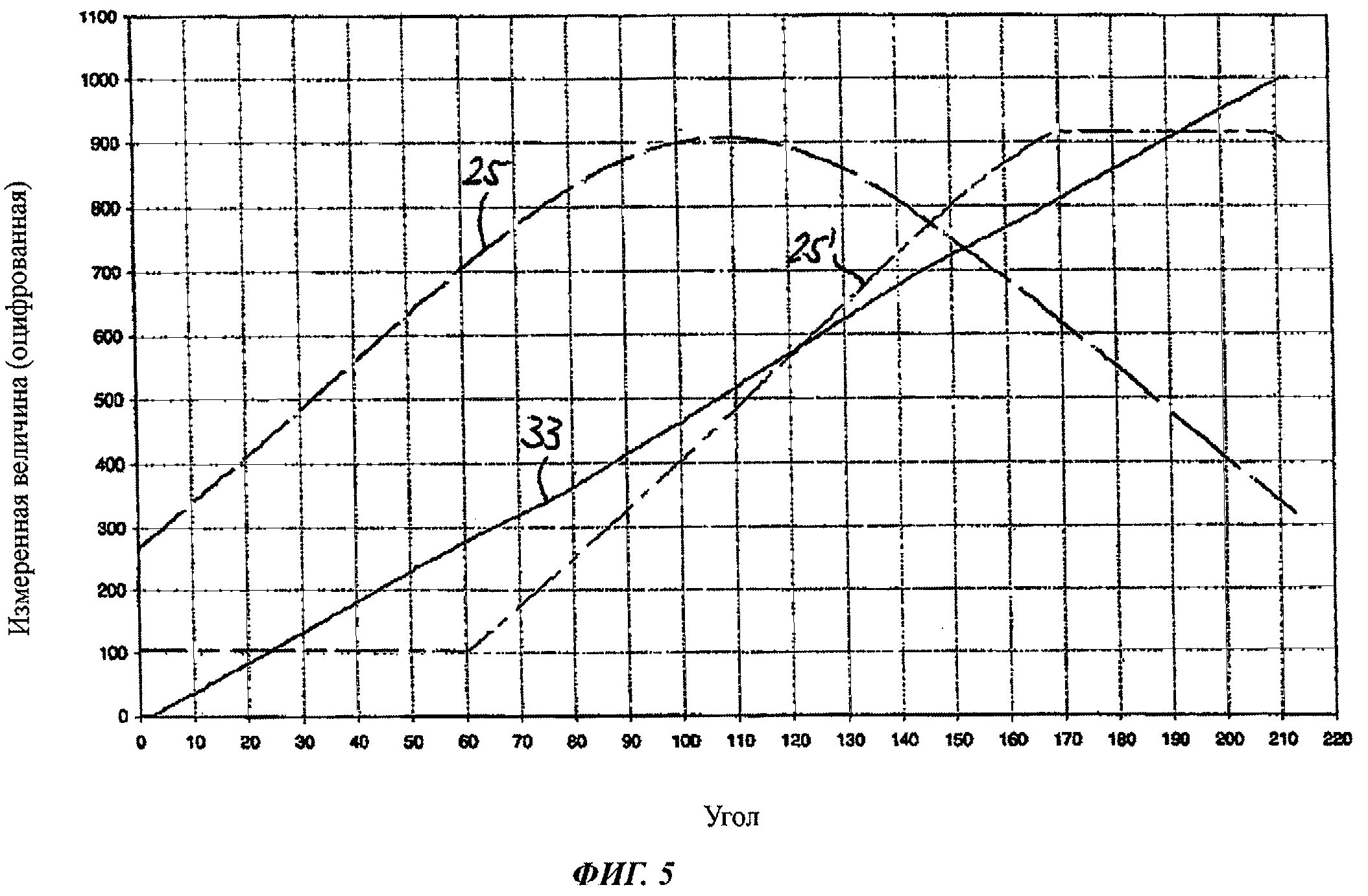
Фигура 5: диаграмма аналого-цифрового преобразованного сигнального напряжения обоих датчиков, а также выделенного из него аналого-цифрового преобразованного выходного напряжения в зависимости от установочного угла.
Осуществление изобретения
Показанное на чертеже устройство 10 применяется, например, в опоре звена манипулятора или в выходных валах для подсоединения сельскохозяйственных устройств к тракторам с целью настройки и определения установочного угла, превышающего 90° или 180° и более в том же направлении вращения элемента 11, который способен вращаться вокруг оси 12 и обозначен здесь как элемент 11 ввода. Настройка и определение установочного угла осуществляется датчиком магнитного поля, состоящим из системы 13 датчиков Холла, и кольцевым постоянным магнитом 14, благодаря чему управляемый узел с изменяемым установочным углом приводится или переставляется не показанным на фигуре образом. В то время как единственный кольцевой постоянный магнит 14 расположен на элементе 11 ввода в виде колеса, система 13 датчиков Холла крепится на держателе 15 датчиков, относительно которого элемент 11 ввода в виде колеса может поворачиваться по кругу на угол >90° или >180° (в представленном варианте исполнения от 210° до 220°) в том же направлении и даже, например, до 360°.
Держатель 15 датчиков, имеющий форму горшка, состоит из дна 16 и кольцевой оболочки 17, неразрывно соединенных между собой. Через центр дна 16 держателя 15 датчиков проходит полая металлическая ось 18. Дно 16 жестко соединяется с осью 18 за счет того, что на радиальный фланец 19 полой оси 18 напрессовано или экструдировано дно 16. Тем самым достигается точное позиционирование полой оси 18, выполненной, предпочтительно, из стали, относительно держателя 15 датчиков.
Оболочка 17 держателя 15 датчиков в данном варианте исполнения содержит две выемки или камеры 22 (далее по тексту выемка и камера будут употребляться как синонимы), которые расположены относительно друг друга на угловом расстоянии немногим меньше 90° (здесь - 80°), начинаются от осевой поверхности 21 оболочки и переходят в осевом направлении через поверхность 23 кольцевого коммутатора в сквозное отверстие 24 меньшего диаметра. В каждую из этих выемок или камер 22 устанавливается отдельный датчик 25 или 25' Холла системы 13 датчиков Холла, контактные ножки 26 которого проходят через сквозное отверстие 24 и выступают и дна 16. Каждый датчик 25, 25' Холла точно устанавливается в выемку 22 за счет того, что выемки или камеры 22, которые в данном варианте исполнения имеют приблизительно трапециевидное сечение, на двух перпендикулярных друг другу боковых поверхностях снабжены выдавленными ребрами 27, 27', между которыми удерживается датчик 25, 25' Холла. Благодаря этому датчик 25, 25' Холла всегда вводится выемку или в камеру 22 под одинаковым углом. В данном варианте исполнения на короткой стороне камеры 22 имеется одно выдавленное ребро 27, в то время как на перпендикулярной ей длинной стороне имеются два расположенных на некотором расстоянии друг от друга выдавленных ребра 27'. Разумеется, количество выдавленных ребер 27, 27' или сечение камеры 22 могут отличаться.
На дне 16 держателя 15 датчиков находится обращенная в сторону от камер 22 печатная плата 29, которая расположена по центру вокруг осевого кольцевого фланца дна 16. Плата 29 жестко соединена с дном 16. В электропроводные отверстия 31 платы 29 вставлены и запаяны контактные ножки 26 датчиков 25, 25' Холла. Таким образом, общая плата 29 обеспечивает электрический монтаж датчиков 25, 25' Холла.
Хотя в данном варианте исполнения используется только два датчика 25, 25' Холла, установленные на угловом расстоянии немногим менее 90° (то есть, в данном случае 80°), подразумевается, что по окружности поверхности 21 оболочки в соответствующем количестве камер 22 могут быть установлены или предусмотрены три или четыре датчика 25 Холла. Два датчика 25, 25' Холла, предусмотренные в данном варианте исполнения, могут перекрывать угловой диапазон от примерно 210° до 220°, а три датчика Холла - угловой диапазон 360°. Избыточная оценка установочного угла в 360 может быть получена при использовании четырех датчиков Холла.
Элемент 11 ввода в виде колеса содержит дно 36 и орган управления (рукоятку) 37, которые выполнены из пластмассы как единое целое. Рукоятка 37 имеет вид сужающейся снизу вверх конической обечайки, которая с целью охвата держателя 15 датчиков открыта с обращенной к нему стороны.
Дно 36 выполнено как одно целое с внутренней втулкой или гильзой 38, которая выступает в осевом направлении с обеих сторон дна 36, причем часть 39 гильзы, расположенная в рукоятке 37, длиннее части 40 гильзы, направленной в сторону от рукоятки 37. Внутренняя поверхность центрической внутренней гильзы 38 охвачена двумя направляющими втулками 41 и 42. Обе одинаковые направляющие втулки 41, 42 соосны внутренней гильзе 38, расположены вдоль нее на некотором осевом расстоянии, и своими выступающими в осевом направлении наружу кольцевыми фланцами 43 и 44 охватывают кольцевые торцевые поверхности участков 39 и 40 гильзы. В целях оптимальной установки обе направляющие втулки 41, 42 запрессованы во внутреннюю гильзу 38 или напрессованы на нее.
Между поверхностью внутренней гильзы 38, обращенной в противоположную направляющим втулкам 41, 42 сторону, и радиально внешним, выступающим от дна в осевом направлении кольцевым фланцем 45 расположен и удерживается постоянный магнит 14 в форме кольцевого магнита. При этом кольцевой постоянный магнит 14 устанавливается в кольцевое углубление дна 36, центрируется и приклеивается. Кольцевой магнит почти достигает кольцевой торцевой поверхности верхнего, более длинного участка 39 гильзы.
Элемент 11 ввода двумя направляющими втулками 41 и 42 устанавливается на полую ось 18 с очень малым зазором и возможностью вращения. Это достигается, в том числе, за счет того, что обе направляющие втулки 41 и 42 представляют собой втулки из спеченной бронзы, которые вместе со стальной полой осью 18 обеспечивают посадку с очень малым зазором.
Благодаря осевому взаимному зацеплению элемента 11 ввода и держателя 15 датчиков и соответствующему расположению постоянного магнита 14 и датчиков 25, 25' Холла возможна точная привязка как в радиальном, так и в осевом направлениях, так как датчики 25, 25' Холла расположены радиально на фиксированном расстоянии, а в осевом направлении - примерно на половине высоты кольцевого постоянного магнита 14.
Предпочтительно на плате 29 предусматривается микроконтроллер (не показанный на чертеже), с помощью которого для текущего положения элемента 11 ввода в виде колеса выбирается наиболее удобно расположенный датчик 25 или 25' Холла, позволяющий точно определить соответствующий установочный угол. Тем самым решается, какой из двух датчиков 25, 25' Холла активен или должен быть активен в данный момент. То есть, согласно графику характеристик (преобразованное в цифровую форму сигнальное напряжение в зависимости от установочного угла) датчиков 25 (пунктир) и 25' (штрих-пунктир) на фиг.5 микроконтроллер последовательно выбирает тот датчик 25, 25' Холла, характеристика 33 которого (сплошная линия) при соответствующем установочном угле представляет собой прямолинейный участок, так что результирующая, составленная в итоге общая или выходная характеристика 33, линейна в диапазоне установочного угла от примерно 210° до 220° (в данном случае). При этом, если необходимо, путем переключения соответствующих датчиков 25, 25' Холла можно добиться наиболее линейных параметров. Например, наилучшая или оптимальная линейность характеристики 33 в угловом диапазоне от 210° до 220° достигается при угловом расстоянии 80° между обоими датчиками 25, 25' Холла.
Кроме того, микроконтроллер предотвращает скачки выходной характеристики в переходных областях, то есть, в точках переключения с датчика 25 Холла на следующий датчик 25' Холла и наоборот. Разумеется, это справедливо и при установочном угле 360° для трех или четырех датчиков Холла.