Результат интеллектуальной деятельности: АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПАРАМЕТРОВ УСТРОЙСТВА БЕЗОПАСНОСТИ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в общем относится к системам контроля безопасности и, в частности к устройствам и способам автоматического регулирования и калибрования параметров системы контроля безопасности транспортеров.
УРОВЕНЬ ТЕХНИКИ
[0002] Транспортеры, такие как эскалаторы, траволаторы, движущиеся дорожки и т.п., обеспечивают движущийся путь для быстрого и удобного перемещения пассажиров из одного места в другое. В частности, движущиеся пластины или ступени транспортера перемещают пассажиров по длине указанного пути между двумя посадочными платформами на предварительно определенных скоростях. Цепи ступеней, скрытые из виду и размещенные под указанным транспортером, служат для соединения каждой ступени по типу замкнутой петли. Указанные цепи ступеней, приводимые в движение главным приводным источником, приводными валами и соответствующими звездочками, перемещают указанные ступени вдоль открытой верхней поверхности указанного транспортера с целью перемещения пассажиров между посадочными платформами. Звездочки, размещенные в пределах каждой указанной посадочной платформы, направляют указанные цепи ступеней через дугу для реверсирования направления перемещения ступеней на противоположное и создания циклического пути возврата.
[0003] В транспортерах, из-за их постоянного движения, возможно возникновение различных внутренних сбоев, что в свою очередь может стать причиной травмирования пассажиров, находящихся на транспортере или вблизи него. Один из таких сбоев связан со скоростью транспортера, или со скоростью, при которой ступени транспортера перемещаются между посадочными платформами. Скорость транспортера может отклоняться от предварительно определенной номинальной скорости и по этой причине ступени транспортера могут перемещаться слишком быстро, слишком медленно, резко останавливаться, слишком быстро ускоряться и т.п. Несоответствия скорости транспортера вызваны несколькими факторами. Однако во многих случаях несоответствия скорости транспортера могут быть вызваны отклонениями в электропитании, подаваемого на главный приводной источник указанного транспортера. Например, избыточное напряжение, недостаточное напряжение или другие отклонения в электропитании, подаваемом на транспортер, вызывают различные изменения в указанном транспортере, которые с течением времени накапливаются и в конечном счете изменяют предварительно определенную номинальную скорость транспортера. Кроме того, отклонения в электропитании также могут препятствовать способности транспортера останавливаться в пределах предварительно определенных промежутков времени или расстояний, как того требуют акты по технике безопасности.
[0004] К другим неисправностям относятся невыровненные или отсутствующие пластины или ступени. С течением времени одна или несколько ступеней транспортера могут оторваться от соответствующих цепей ступеней, что может стать причиной падения указанной ступени под указанную транспортирующую систему, причем это падение остается необнаруженным. Кроме того, причиной отсутствия ступеней может быть ненадлежащее техническое обслуживание. Транспортеры требуют периодического обслуживания, в процессе которого возможны снятие, замена и т.п. одной или нескольких ступеней. Однако, если ступень вновь не закреплена надлежащим образом или не выровнена относительно указанных цепей ступеней, она может оторваться и упасть. В любом случае, если управляющая система транспортера не обнаруживает пустоту, вызванную отсутствующей ступенью, то указанный транспортер может продолжить работу, выдвинуть указанную пустоту на верхнюю поверхность указанного транспортера и подставить указанную пустоту пассажирам. Неосведомленные пассажиры могут ступить в указанную пустоту, упасть и получить травму.
[0005] Таким образом, на эскалаторах и траволаторах осуществляют различные мероприятия по обеспечению безопасности для минимизации вреда, причиняемого указанными неисправными состояниями. Например, техническими специалистами периодически выполняются работы по техническому обслуживанию для обеспечения надлежащей работы указанного транспортера. Однако такое техническое обслуживание занимает много времени, является дорогим и связано с риском ошибки оператора. Другие мероприятия по обеспечению безопасности связаны с использованием устройств контроля безопасности. В частности, транспортеры могут быть оснащены устройством контроля безопасности, которое контролирует работу указанного транспортера с целью выявления неисправных состояний. Устройства контроля безопасности могут быть выполнены с возможностью передавать в блок управления корректирующие команды при обнаружении неисправностей или просто прекращать работу транспортера до устранения неисправности вручную техническим специалистом по обслуживанию. Однако также может потребоваться, чтобы транспортеры работали в соответствии с нормами и правилами техники безопасности, соответствующими типу транспортера, его размещению, применению и т.п. Поскольку тип, размещение и применение каждого транспортера различны, устройство контроля безопасности, соответствующее каждому транспортеру, также должно быть отличным от других.
[0006] В частности, указанное устройство контроля безопасности каждого транспортера должно быть специально разработано, настроено и предварительно запрограммировано для конкретного транспортера, что влечет за собой значительные затраты времени и денег на формирование каждой транспортирующей системы. Кроме того, это означает, что известные устройства обеспечения безопасности не могут быть адаптированы к какому-либо транспортеру другого типа, и, более того, не могут быть модернизированы с целью соответствия изменяющимся условиям, таким как новые нормы и правила техники безопасности транспортера. Для соответствия изменяющимся нормам и правилам техники безопасности необходимо заменять действующие устройства обеспечения безопасности или всю транспортирующую систему. Такая работа требует от конечного пользователя расходования значительных денежных средств и времени при вынужденном простое.
[0007] Таким образом, необходима разработка надежных и универсальных систем контроля безопасности, которые обеспечивали бы контроль параметров безопасности транспортирующих систем более эффективными с точки зрения затрат времени и денег образом. В частности, необходима разработка системы контроля безопасности, которая может быть адаптирована к широкому спектру транспортеров различных типов и местным правилам техники безопасности, и которая осуществляет контроль присутствия ступени транспортера, скорости ступени, тормозного пути и других параметров контроля безопасности. Кроме того, необходима разработка системы контроля безопасности, которая автоматически определяет рабочие и механические характеристик соответствующего транспортера, самостоятельно калибрует необходимые параметры безопасности и контролирует указанные параметры в соответствии с нормами техники безопасности указанного транспортера.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] В соответствии с одним вариантом реализации настоящего изобретения, предложено устройство для автоматического регулирования параметров контроля безопасности транспортера, который содержит ступени, проходящие между первой платформой и второй платформой, которые соединены посредством цепи ступеней и приводятся в движение посредством главного приводного компонента. Указанное устройство содержит датчики, выполненные с возможностью вывода по меньшей мере сигнала скорости ступени и сигнала обнаружения ступени; и модуль контроля безопасности, который взаимодействует с указанными датчиками и с блоком управления транспортера, причем указанный модуль выполнен с возможностью автоматически определять рабочие и механические характеристики указанного транспортера на основании выходных сигналов указанных датчиков, подтверждать указанные рабочие характеристики указанного транспортера на основании предварительно определенных номинальных технических требований, и определять параметры контроля безопасности, соответствующие указанным подтвержденным рабочим характеристикам указанного транспортера, посредством которых контролировать работу транспортера.
[0009] В соответствии с другим вариантом реализации настоящего изобретения, предложен способ автоматического регулирования параметров контроля безопасности транспортера, который содержит ступени, проходящие между первой платформой и второй платформой, которые соединены посредством цепи ступеней и приводятся в движение главным приводным компонентом. Указанный способ включает этапы: определения рабочих и механических характеристик указанного транспортера на основании выходных сигналов датчика скорости ступени и датчика обнаружения ступени; подтверждения указанных рабочих характеристик указанного транспортера на основании предварительно определенных номинальных технических требований; и определения параметров контроля безопасности, соответствующих указанным подтвержденным рабочим характеристикам указанного транспортера, которые позволяют контролировать работу транспортера.
[0010] В соответствии с еще одним вариантом реализации настоящего изобретения, предложен способ автоматического регулирования параметров контроля безопасности транспортера, который содержит ступени, проходящие между первой платформой и второй платформой, которые соединены посредством цепи ступеней и приводятся в движение главным приводным компонентом. Указанный способ включает этапы отбора выходных сигналов датчика скорости ступени и датчика обнаружения ступени в течение предварительно определенного периода времени; определения измеренной скорости ступени на основании выходного сигнала указанной скорости ступени; определения типа датчика скорости ступени на основании частоты выходного сигнала указанной скорости ступени; определения размера ступени транспортера на основании соотношения между выходными сигналами скорости ступени и выходными сигналами обнаружения ступени; сравнивания измеренной скорости ступени с предварительно определенной скоростью ступени; сравнивания взаимного соотношения между выходными сигналами датчика с предварительно определенным допустимым отклонением и определения параметров контроля безопасности только в случае, если измеренная скорость ступени и взаимное соотношение между выходными сигналами датчика находятся в пределах предварительно определенных допустимых отклонений.
[0011] Ниже приведено подробное описание вариантов реализации настоящего изобретения со ссылками на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
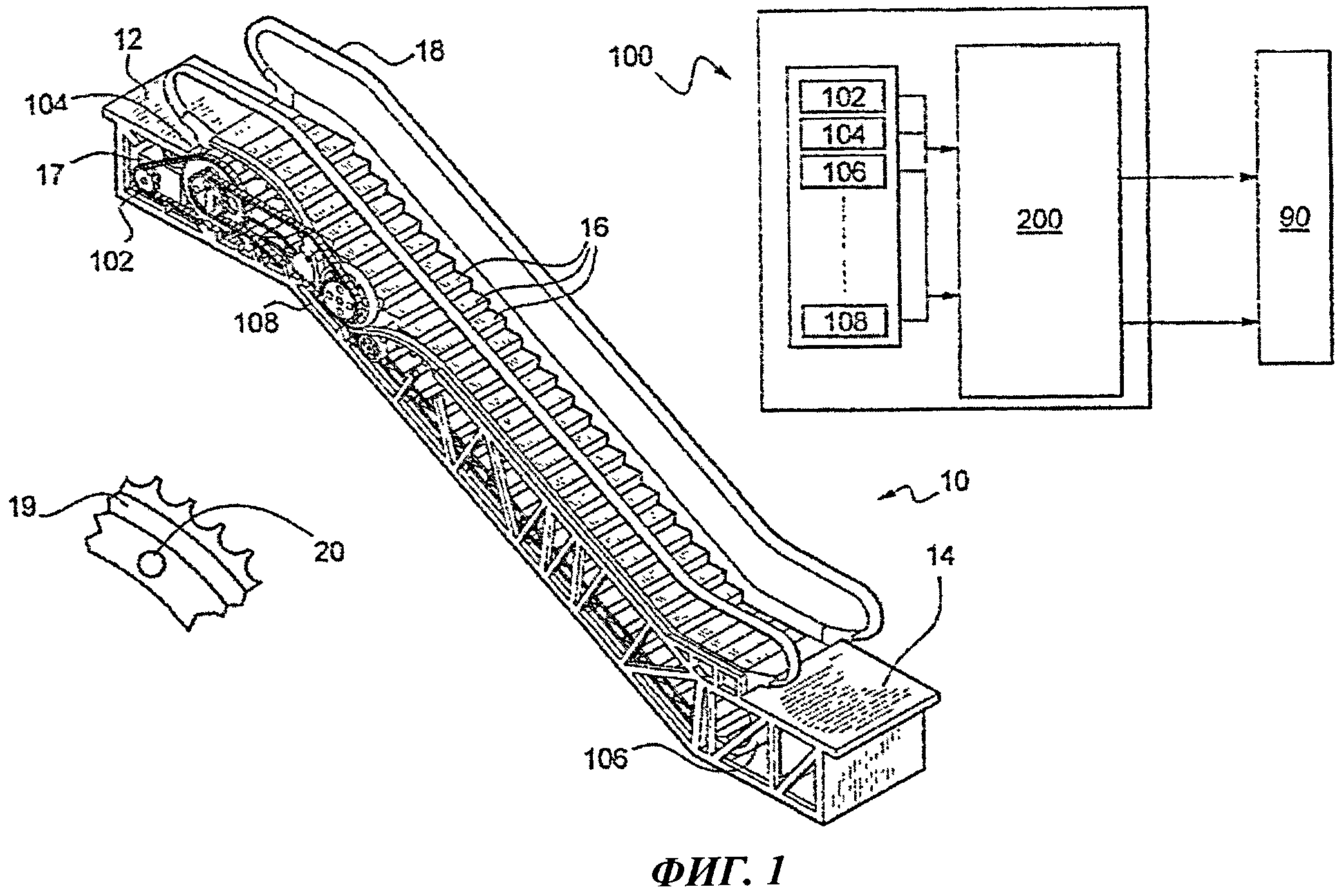
[0012] На Фиг.1 показан перспективный вид транспортера, содержащего показательное устройство безопасности для автоматического регулирования параметров контроля безопасности отсутствующих ступеней, созданный в соответствии с идеями настоящего описания;
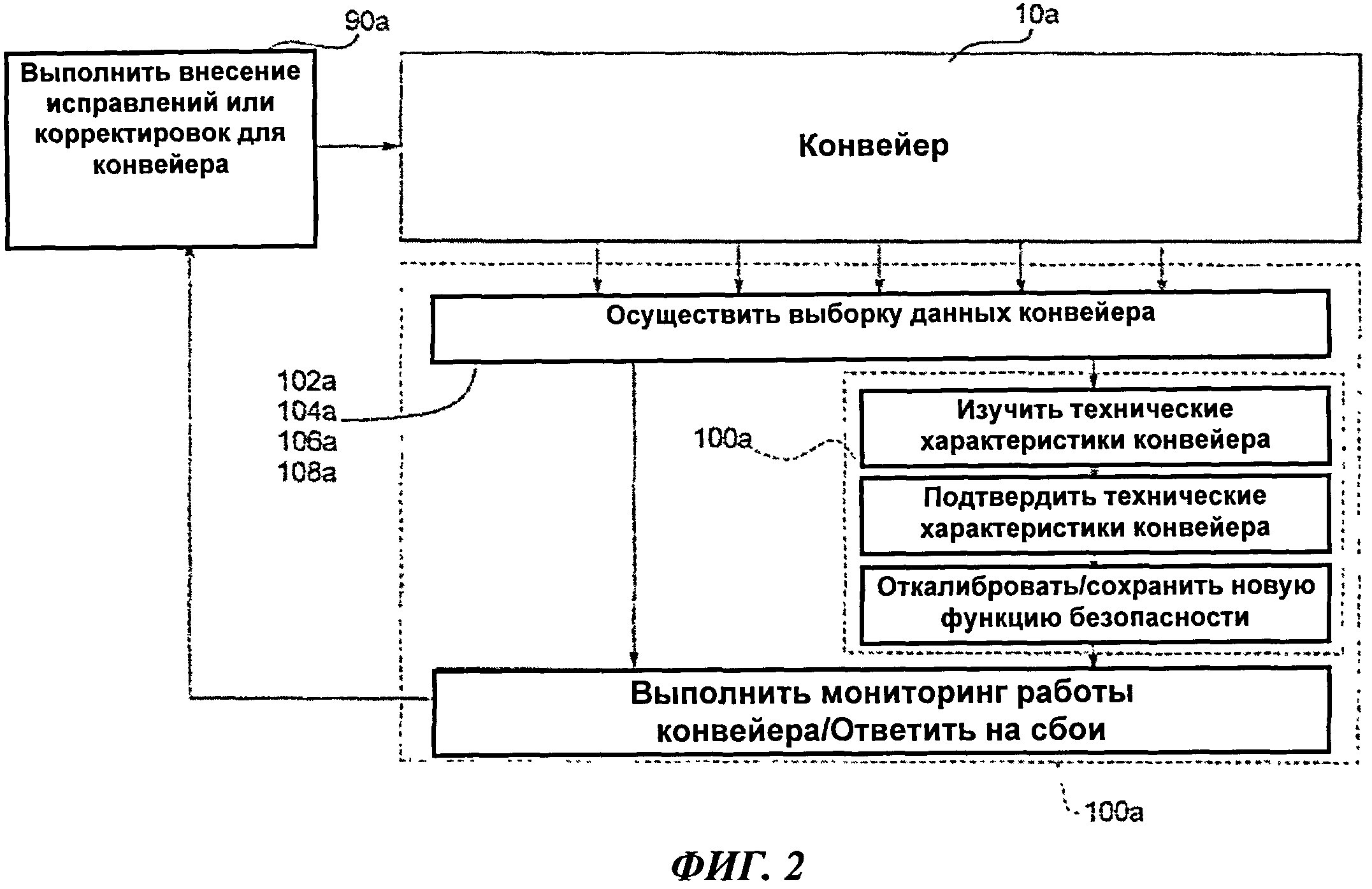
[0013] На Фиг.2 схематически показана показательная транспортирующая система, содержащая автоматическое устройство контроля безопасности; и
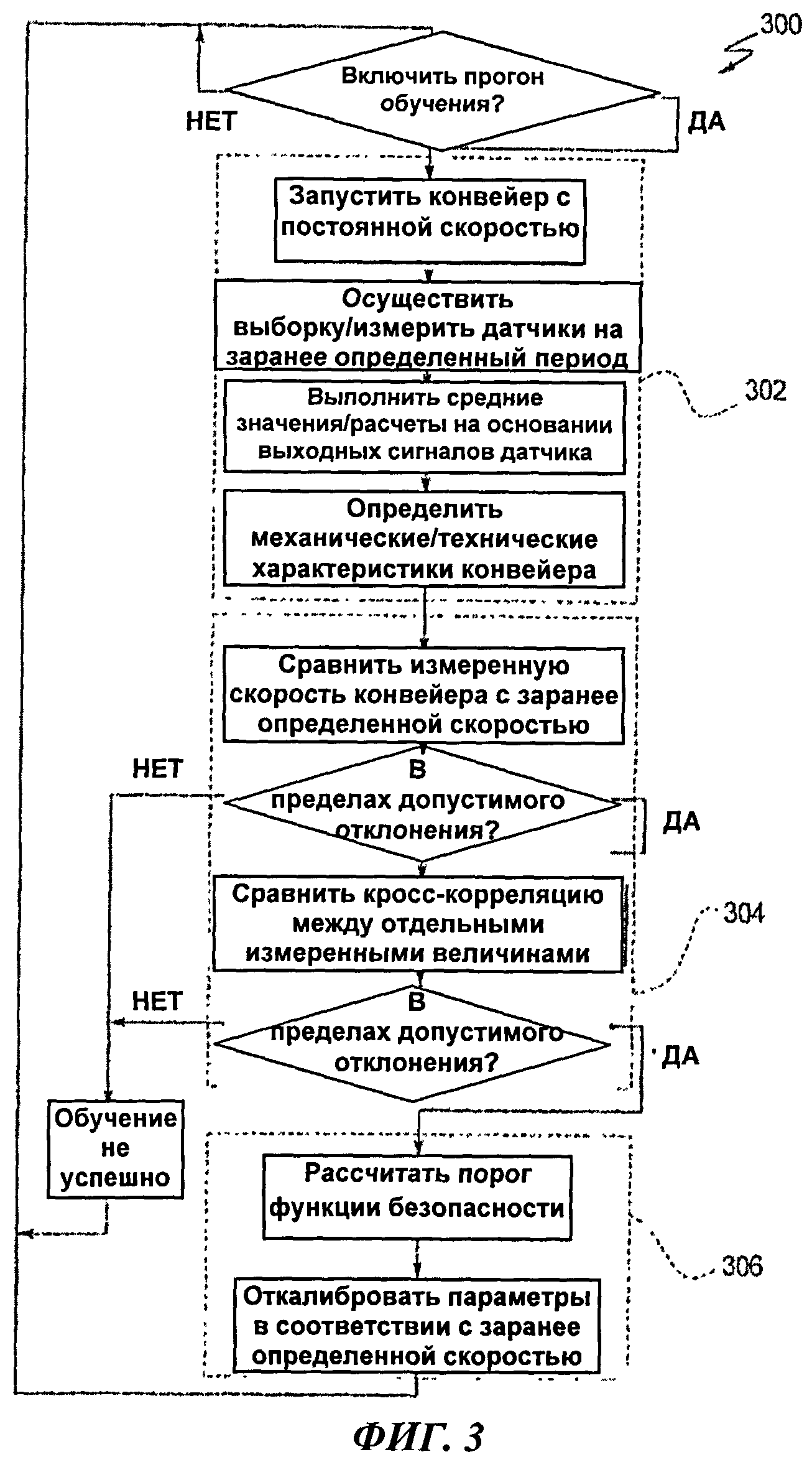
[0014] На Фиг.3 показана блок-схема показательного способа обучающего режима для автоматического регулирования параметров контроля безопасности транспортера.
[0015] В соответствии с настоящим изобретением, возможны различные изменения и использование альтернативных конструкций, однако некоторые варианты реализации настоящего изобретения далее описаны более подробно со ссылками на прилагаемые чертежи. Возможны различные модификации, изменения и замена элементов их эквивалентами, не выходящие за пределы объема настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0016] Со ссылками на чертежи и, в частности, на Фиг.1 проиллюстрировано показательное устройство безопасности транспортера, обозначенное ссылочным номером 100. Очевидно, что идеи настоящего описания применимы для формирования устройств автоматического регулирования параметров контроля безопасности транспортера, выходящих за пределы описанного ниже. Для специалиста в данной области техники очевидно, что ниже описаны лишь показательные варианты реализации настоящего изобретения.
[0017] Как видно из Фиг.1, предложен показательный транспортер 10, представляющий собой эскалатор, который содержит первую платформу 12, вторую платформу 14, движущиеся пластины или ступени 16, проходящие между указанными первой и второй платформами 12, 14, а также движущиеся поручни 18, размещенные вдоль указанных ступеней 16. Ступени 16 транспортера 10 приводятся в движение главным приводным источником 17, например, электродвигателем и т.п., и перемещаются между указанными платформами 12, 14. Указанный приводной источник 17 вращает вал привода и соответствующие зубчатые колеса с целью вращения ленты или цепи замкнутой петли ступеней, которая механически соединяет внутренние поверхности ступеней 16 в пределах транспортера 10. В пределах каждой из двух посадочных платформ 12, 14 звездочки 19 направляют указанные цепи ступеней и прикрепленные ступени 16 через дугу для реверсирования направления перемещения ступеней и создания циклического пути возврата. Поручни 18 поворотно перемещаются посредством аналогичных средств вдоль ступеней 16 на скорости, сопоставимой со скоростью ступеней 16.
[0018] Кроме того, согласно Фиг.1, транспортер 10 может быть оснащен блоком 90 управления транспортером и устройством 100 безопасности. В общем случае, блок 90 управления служит для управления всей работой и контроля транспортирующей системы. Устройство 100 безопасности может служить для обеспечения функционирования транспортера 10 согласно соответствующим нормам и правилам техники безопасности. Кроме того, устройство 100 безопасности также может быть использовано в соответствии с другими директивами, действующими, например, на предприятии, где установлен указанный транспортер, договорами подряда, спецификациями, определенными пользователем, и т.п. Устройство 100 безопасности содержит датчики 102, 104, 106, 108 для отслеживания различных параметров транспортера 10 и модуль 200 контроля безопасности. В частности, устройство 100 безопасности может отслеживать скорость привода и скорость ступени транспортера 10, скорость 18 поручней, присутствие или отсутствие ступеней 16 относительно каждой посадочной платформы 12, 14, и т.п. С целью определения скорости ступени устройство 100 безопасности содержит датчик 102 скорости ступени, например, фотоэлектрический датчик, который размещен в непосредственной близости от зубьев 20 звездочки 19, приводящей в движение цепь ступеней, соединяющей ступени 16. В соответствии с другим вариантом реализации, датчик 102 скорости ступени содержит кодирующее устройство, размещенное на оси звездочки 19 и выполненное с возможностью обнаружения скорости вращения звездочки 19. Для обнаружения присутствия или отсутствия ступеней 16 устройство 100 безопасности может содержать датчики 104, 106 обнаружения ступени в посадочных платформах 12, 14 транспортера 10. В частности, датчики 104, 106 содержат бесконтактные датчики, которые выполнены с возможностью обнаружения металла в ролике ступени или в осях ролика ступени пластины или ступени 16. Кроме того, устройство 100 безопасности содержит датчики 108 поручней для отслеживания относительной скорости поручней 18 относительно скорости ступеней 16. Модуль 200 контроля безопасности может осуществлять отбор выходных сигналов датчика с целью первоначального изучения рабочих и механических характеристик транспортера 10, подтверждать измеренные данные, автоматически регулировать параметры контроля безопасности согласно указанным изученным характеристикам и правилам техники безопасности, а также контролировать работу транспортера для выявления любых существенных признаков неисправностей или отклонений. После обнаружения неисправности модуль 200 контроля безопасности может передавать в блок 90 управления транспортером необходимые инструкции для соответствующей регулировки работы транспортера.
[0019] Со ссылкой на Фиг.2 проиллюстрирована общая схема показательной транспортирующей системы, объединенной с автоматически регулирующим устройством 100а безопасности. В частности, главные компоненты всей указанной системы могут включать по меньшей мере транспортер 10а, блок 90а управления транспортером и устройство 100а безопасности. Согласно варианту реализации, показанному на Фиг.1, на транспортере 10а и в его пределах могут быть размещены различные датчики 102а для измерения или осуществления отбора данных для конкретного транспортера 10а в течение предварительно определенного периода времени при нормальной работе транспортера 10а. При работе модуль 200а контроля безопасности может использовать указанные отобранные данные, переданные датчиками 102а, для изучения рабочих и механических характеристик транспортера 10а. В зависимости от типа используемых датчиков 102а, модуль 200а контроля безопасности может применять отобранные данные для определения таких характеристик, как скорость ступени, размер ступени, шаг ступени, скорость поручня, соответствующие передаточные числа, а также тип используемых датчиков.
[0020] После получения всех требуемых данных транспортера 10а модуль 200а контроля безопасности подтверждает отобранные данные или сравнивает указанные отобранные данные с предварительно определенными номинальными величинами и пороговыми значениями. Указанные предварительно определенные величины включают номинальные скорости ступеней транспортера, размеры ступеней и т.п., как установлено местными нормами и правилами техники безопасности. Кроме того, указанные предварительно определенные величины включают ограничения, представленные другими директивами, например, специальные требования по контракту, предпочтения, определенные пользователем, и т.п. Если указанные отобранные данные находятся в пределах допустимого порогового значения предварительно определенной номинальной величины, то модуль 200а контроля безопасности может приступить к определению соответствующей функции безопасности и соответствующих параметров контроля безопасности конкретного транспортера 10а. Однако, если указанные отобранные данные не находятся в пределах допустимого порогового значения предварительно определенных номинальных величин, то модуль 200а контроля безопасности может отклонить указанные отобранные данные и приступить к получению последующих образцов данных транспортера до тех пор, пока подтверждение не будет успешным. Если указанные отобранные данные достоверны и соответствуют нормам и правилам техники безопасности, то модуль 200а контроля безопасности может автоматически генерировать новую функцию безопасности для конкретного транспортера или автоматически регулировать существующую функцию безопасности, предварительно сохраненную в устройстве 100а безопасности. В частности, модуль 200а контроля безопасности может калибровать параметры контроля безопасности до предварительно определенных величин и сохранять указанные параметры в устройстве 100а безопасности для ссылки.
[0021] Используя указанную функцию безопасности в качестве ссылки, модуль 200а контроля безопасности может также контролировать работу транспортера 10а для выявления любого существенного отклонения от номинальных технических характеристик. При обнаружении такого отклонения модуль 200а контроля безопасности может передавать необходимые сигналы в блок 90а управления транспортера для исправления указанной ошибки. Например, если устройство 100а безопасности обнаруживает существенное увеличение скорости ступени транспортера, то модуль 200а контроля безопасности отдает команду блоку 90а управления на замедление. В ответ блок 90а управления может уменьшить подачу электропитания к электродвигателю, приводящему в движение транспортер 10а, или аналогичному устройству, с целью уменьшения скорости ступени указанного транспортера. После того, как скорость ступени указанного транспортера возвращается к скорости, находящейся в пределах допустимых границ, как установлено сохраненной функцией безопасности, модуль 200а контроля безопасности отдает команду блоку 90а управления на прекращение замедления и поддержание обычной скорости ступени. Соответственно, затем блок 90а управления транспортером может поддерживать электропитание, подаваемое к электродвигателю.
[0022] Согласно варианту реализации, показанному на Фиг.1, модуль 200 контроля безопасности может быть реализован с использованием микроконтроллера, микропроцессора и т.п., установленных в панели управления транспортером 10 так, чтобы быть легко доступными для обслуживающего специалиста. Кроме того, устройство 100 безопасности может содержать дисплей или пользовательский интерфейс, посредством которого обслуживающий специалист просматривает или изменяет данные транспортера. Кроме того, путем использования такого интерфейса обслуживающий специалист может модернизировать модуль 200 контроля безопасности в соответствии с изменяющимися нормами и правилами техники безопасности. С целью регулирования или калибрования параметров контроля безопасности транспортера 10 в соответствии с новыми требованиями техники безопасности, обслуживающему специалисту необходимо лишь отдать команду модулю 200 контроля безопасности на осуществление обучающего режима 300.
[0023] Согласно настоящему описанию, обучающий режим 300 представляет собой алгоритм, предварительно запрограммированный в микропроцессор, микроконтроллер и т.п. для работы в соответствии с этапами, схематически показанными на фиг.3. Перед выполнением обучающего режима 300 требуется выполнение по меньшей мере одного предварительного условия. Например, для осуществления обучающего режима 300 может потребоваться, чтобы транспортер 10 работал при постоянной скорости в течение предварительно определенного периода времени. Если транспортер 10 представляет собой эскалатор, то перед началом обучающего режима 300 может потребоваться, чтобы указанный эскалатор работал при постоянной скорости в конкретном направлении, вверх или вниз. Кроме того, для обучающего режима 300 требуются предварительно определенные входные данные, которые могут задаваться в процессе изготовления или на месте эксплуатации обслуживающим специалистом. Указанные предварительно определенные входные данные представляют собой дискретные значения, устанавливающие по меньшей мере одно ограничение, которому должен соответствовать транспортер 10. Например, для обучающего режима 300 может потребоваться по меньшей мере одна дискретная номинальная скорость ступени транспортера, размеры ступени или пластины, и т.п., которые допустимы стандартами техники безопасности.
[0024] После выполнения всех указанных предварительных условий и получения модулем 200 необходимых предварительно определенных входных данных, для запуска обучающего режима 300 может потребоваться ручной ввод или инструкции пользователя. После получения инструкций на запуск, обучающий режим 300 может сначала выполнять обучающий цикл 302. В течение обучающего цикла 302 обучающий режим 300 определяет условия нормального режима эксплуатации транспортера 10 с использованием различных датчиков 102, 104, 106, 108 в течение предварительно определенного периода времени. Например, обучающий цикл 302 может осуществлять отбор данных, измеренных датчиком 102 скорости ступени, датчиками 104, 106 обнаружения ступени, датчиками 108 поручня и т.п., за период приблизительно в 40 секунд. Затем на основании указанных отобранных данных обучающий цикл 302 может определять средние значения и осуществлять дополнительные расчеты с целью определения ключевых характеристик транспортера 10. В частности, обучающий цикл 302 может предусматривать расчет измеренной скорости ступени транспортера 10, среднего периода каждого сигнала обнаружения ступени, среднего периода сигнала скорости ступени, среднего количества импульсов сигнала скорости ступени на период сигналов обнаружения ступени, средней частоты сигнала скорости ступени, среднего периода сигнала поручня и т.п. С использованием указанных производных в обучающем режиме 300 могут быть определены различные механические особенности конкретного транспортера 10. В частности, в обучающем цикле 302 на основании частоты сигнала скорости ступени, обеспечиваемого посредством датчика 102 скорости ступени, может быть определен тип используемого датчика 102 скорости ступени: бесконтактный или кодирующий. Кроме того, в обучающем цикле 302 на основании количества импульсов сигнала скорости ступени за период сигналов обнаружения ступени может быть определен размер, глубина и/или шаг ступени транспортера.
[0025] После изучения рабочих и механических характеристик транспортера 10 в течение обучающего цикла 302, обучающий режим 300 может приступить к подтверждающему циклу 304, как показано на Фиг.3. В подтверждающем цикле 304 измеренная скорость ступени транспортера 10 может сравниваться с предварительно определенной скоростью ступени. Как описано выше, модуль 200 контроля безопасности может быть предварительно запрограммирован и в него может быть внесен ряд допустимых номинальных скоростей ступеней. В подтверждающем цикле 304 измеренная скорость ступени может сравниваться с каждой из имеющихся предварительно определенных скоростей ступеней, например, 0,50 м/с, 0,65 м/с, 0,75 м/с и 0,90 м/с, с целью определения наилучшего совпадения, или предварительно определенной скорости ступени, которая наилучшим образом приближена к указанной измеренной скорости ступени. Кроме того, в подтверждающем цикле 304 может быть определено, находится ли измеренная скорость ступени в пределах предварительно определенного допустимого отклонения, например, 5% или 10%, выбранной предварительно определенной скорости ступени. В качестве дополнительного критерия в подтверждающем цикле 304 может быть определено, находятся ли измерения, отобранные в обучающем цикле 302, во взаимной корреляции в пределах предварительно определенного допустимого отклонения. В зависимости от результатов, в подтверждающем цикле 304 отменяется или продолжается обучающий режим 300. Например, режим обучения 300 может быть отменен в подтверждающем цикле 304 только когда и измеренная скорость ступени, и взаимная корреляция между отдельными измерениями не находятся в пределах соответствующих предварительно определенных допустимых отклонений. В соответствии с другим вариантом реализации, режим обучения 300 может быть отменен в подтверждающем цикле 304 только когда или измеренная скорость ступени, или взаимная корреляция между отдельными измерениями не находится в пределах соответствующего предварительно определенного допустимого отклонения. В случае отмены или прерывания обучающего режима 300, он может быть повторно запущен автоматически или вручную через инструкции пользователя.
[0026] Если подтверждающий цикл 304 выполнен успешно, обучающий режим 300 приступает к калибрующему циклу 306, как показано на Фиг.3. На основании указанных изученных рабочих и механических характеристик транспортера 10, в калибрующем цикле 306 для конкретного транспортера 10 может автоматически генерироваться и сохраняться для ссылки новая функция безопасности. В соответствии с другим вариантом реализации, в калибрующем цикле 306 могут автоматически регулироваться параметры контроля безопасности существующей функции безопасности. В частности, функция безопасности может включать несколько параметров контроля безопасности или пороговых значений, посредством которых транспортер 10 может контролироваться. Указанные параметры контроля безопасности включают пороговые значения, относящиеся к скорости ступени транспортера, к движению ступеней вперед и назад, к обнаружению отсутствующей ступени, к тормозному пути, к скорости поручня и т.п. Важно то, что полученная функция безопасности и ее параметры оказываются автоматически откалиброванными в соответствии с предварительно определенными номинальными скоростями ступеней, так чтобы обеспечить соответствие нормам и правилам техники безопасности.
[0027] На основании вышеизложенного очевидно, что настоящим изобретением предложены транспортеры, например, эскалаторы, траволаторы, движущиеся тротуары и т.п., оснащенные устройствами безопасности, которые преодолевают недостатки, известные из уровня техники. В частности, настоящим изобретением предложено устройство контроля безопасности, которое может автоматически адаптироваться к транспортеру любого типа и одновременно контролировать соответствие нормам и правилам техники безопасности, применимым к конкретному транспортеру. Указанный модуль контроля безопасности является адаптивным, что облегчает процессы изготовления, установки и техобслуживания транспортеров в любой среде. Указанный модуль контроля безопасности является автоматическим, что минимизирует время простоев и расходы на техобслуживание транспортеров. Кроме того, благодаря снижению потребности в техобслуживании, выполняемом специалистами, использование указанного модуля контроля безопасности дополнительно минимизирует риск сбоев, связанных с человеческой ошибкой.
[0028] В настоящем описании изложены лишь некоторые варианты реализации настоящего изобретения, однако для специалиста в данной области техники очевидно, что возможны изменения и модификации без отступления от сущности настоящего изобретения. Эти и другие варианты реализации следует считать эквивалентными и находящимися в пределах объема настоящего изобретения.
Механизм движущегося ограждения для пассажирских транспортировочных устройств с цепным приводом
Способ эксплуатации лифта в аварийном режиме
Управление крутящим моментом при торможении
Контролирующее устройство для контроля лифтового тягового элемента
Система питания лифта и здания с управлением вторичным источником питания
Система защиты лифта от превышения ускорения и превышения скорости
Устройство и способ для обнаружения отсутствующей ступени транспортера
Автоматическая адресация установочных приспособлений лифта
Управление общим током и аккумулированием энергии в приводе лифта
Управление мощностью от нескольких источников в системе питания лифта
Механизм движущегося ограждения для пассажирских транспортировочных устройств с цепным приводом
Способ эксплуатации лифта в аварийном режиме
Управление крутящим моментом при торможении
Контролирующее устройство для контроля лифтового тягового элемента
Система обнаружения и обработки превышения ускорения и превышения скорости
Система питания лифта и здания с управлением вторичным источником питания
Система защиты лифта от превышения ускорения и превышения скорости
Устройство и способ для обнаружения отсутствующей ступени транспортера
Автоматическая адресация установочных приспособлений лифта
Управление общим током и аккумулированием энергии в приводе лифта

