Результат интеллектуальной деятельности: СПОСОБ КАЛИБРОВКИ И ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ В СИСТЕМЕ РАДИОСВЯЗИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к связи и более конкретно к способам передачи сигнала в сетях радиосвязи.
Уровень техники
Системы радиосвязи сегодня широко распространены для предоставления разнообразных услуг связи, таких как передача голоса, видео, пакетных данных, сообщений, программ вещания и т.п. Такие системы радиосвязи могут быть системами многостанционного доступа, способными поддерживать связь с несколькими абонентами путем совместного использования имеющихся системных ресурсов. К примерам таких систем многостанционного доступа относятся системы многостанционного доступа с кодовым уплотнением (CDMA), системы многостанционного доступа с временным уплотнением (TDMA), системы многостанционного доступа с частотным уплотнением (FDMA), системы многостанционного доступа с ортогональным частотным уплотнением (OFDMA) и системы FDMA с одной несущей (SC-FDMA).
Сеть радиосвязи может включать множество Узлов B (Node B), которые могут поддерживать связь для некоторого числа единиц абонентской аппаратуры (UE). Узел B может поддерживать связь с аппаратурой UE посредством нисходящей линии и восходящей линии. Нисходящей линией (или прямой линией) называют линию связи от Узла B к аппаратуре UE, а восходящей линией (или обратной линией) называют линию связи от аппаратуры UE к Узлу B. Узел B может использовать несколько антенн для передачи данных одной или нескольким антеннам аппаратуры UE. Данные желательно передавать таким образом, чтобы добиться хороших характеристик.
Сущность изобретения
Здесь описаны способы калибровки и формирования диаграммы направленности в системе радиосвязи. Согласно одному из аспектов Узел B может периодически выполнять калибровку в каждом интервале с группой единиц аппаратуры UE с целью получения калибровочного вектора для Узла B. Узел B может использовать этот калибровочный вектор, чтобы учесть рассогласование характеристик передающего и приемного трактов в Узле B.
В одном из вариантов Узел B может в каждом калибровочном интервале выбрать группу единиц аппаратуры UE для выполнения калибровки, например единиц аппаратуры UE с хорошим качеством канала. Узел B может передать выбранным единицам аппаратуры UE сообщения для перехода в режим калибровки. Узел B может принять оценку характеристики нисходящего канала от каждой из выбранных единиц аппаратуры UE и может также принять, по меньшей мере, один зондирующий опорный сигнал, по меньшей мере, от одной антенны аппаратуры UE. Узел B может также рассчитать оценку характеристики восходящего канала для каждой из выбранных единиц аппаратуры UE на основе зондирующих опорных сигналов, принимаемых от этой UE. Узел B может вычислить, по меньшей мере, один начальный калибровочный вектор для каждой выбранной аппаратуры UE на основе оценок нисходящего и восходящего каналов для этой UE. После этого Узел B может сформировать калибровочный вектор для себя на основе начальных калибровочных векторов для всех выбранных единиц аппаратуры UE. Далее Узел B может применять этот калибровочный вектор до тех пор, пока он не будет обновлен в следующем калибровочном интервале.
Согласно другому аспекту Узел B может формировать диаграмму направленности для аппаратуры UE с учетом разбаланса коэффициентов усиления нескольких антенн аппаратуры UE. Этот разбаланс усиления может быть обусловлен различием коэффициентов усиления приемных и/или передающих трактов аппаратуры UE. Согласно одному из сценариев Узел B может определить предкодирующую матрицу с учетом разбаланса коэффициентов усиления вследствие различного усиления систем автоматической регулировки усиления (АРУ (AGC)) для приемных трактов нескольких антенн аппаратуры UE. Согласно другому сценарию Узел B может определить предкодирующую матрицу с учетом разбаланса усилений, обусловленного (i) различием коэффициентов усиления в усилителях мощности (РА) для передающих трактов нескольких антенн аппаратуры UE и/или (ii) различием коэффициентов усиления этих нескольких антенн.
В одном из вариантов Узел B может принимать от аппаратуры UE, по меньшей мере, один относительный коэффициент усиления. Каждый такой относительный коэффициент определяется коэффициентом усиления рассматриваемой антенны и коэффициентом усиления опорной антенны в аппаратуре UE. Каждый такой коэффициент усиления может содержать коэффициент усиления системы АРУ, коэффициент усиления в усилителе мощности РА, коэффициент усиления антенны и т.п. Узел B может определить составную канальную матрицу на основе канальной матрицы для аппаратуры UE и матрицы усиления, сформированной с использованием, по меньшей мере, одного относительного коэффициента усиления. В другом варианте Узел B может принимать зондирующие опорные сигналы от нескольких антенн аппаратуры UE. Каждый зондирующий опорный сигнал может быть передан аппаратурой UE от одной из антенн на уровне мощности, определяемом на основе относительного коэффициента усиления для этой антенны. Узел B может сформировать составную канальную матрицу на основе этих зондирующих опорных сигналов. В обоих вариантах Узел B может определять предкодирующую матрицу на основе составной канальной матрицы, которая может быть вычислена на основе разбаланса коэффициентов усиления в аппаратуре UE. После этого Узел B может сформировать диаграмму направленности для аппаратуры UE с использованием предкодирующей матрицы.
Различные аспекты и признаки настоящего изобретения более подробно описаны ниже.
Краткое описание чертежей
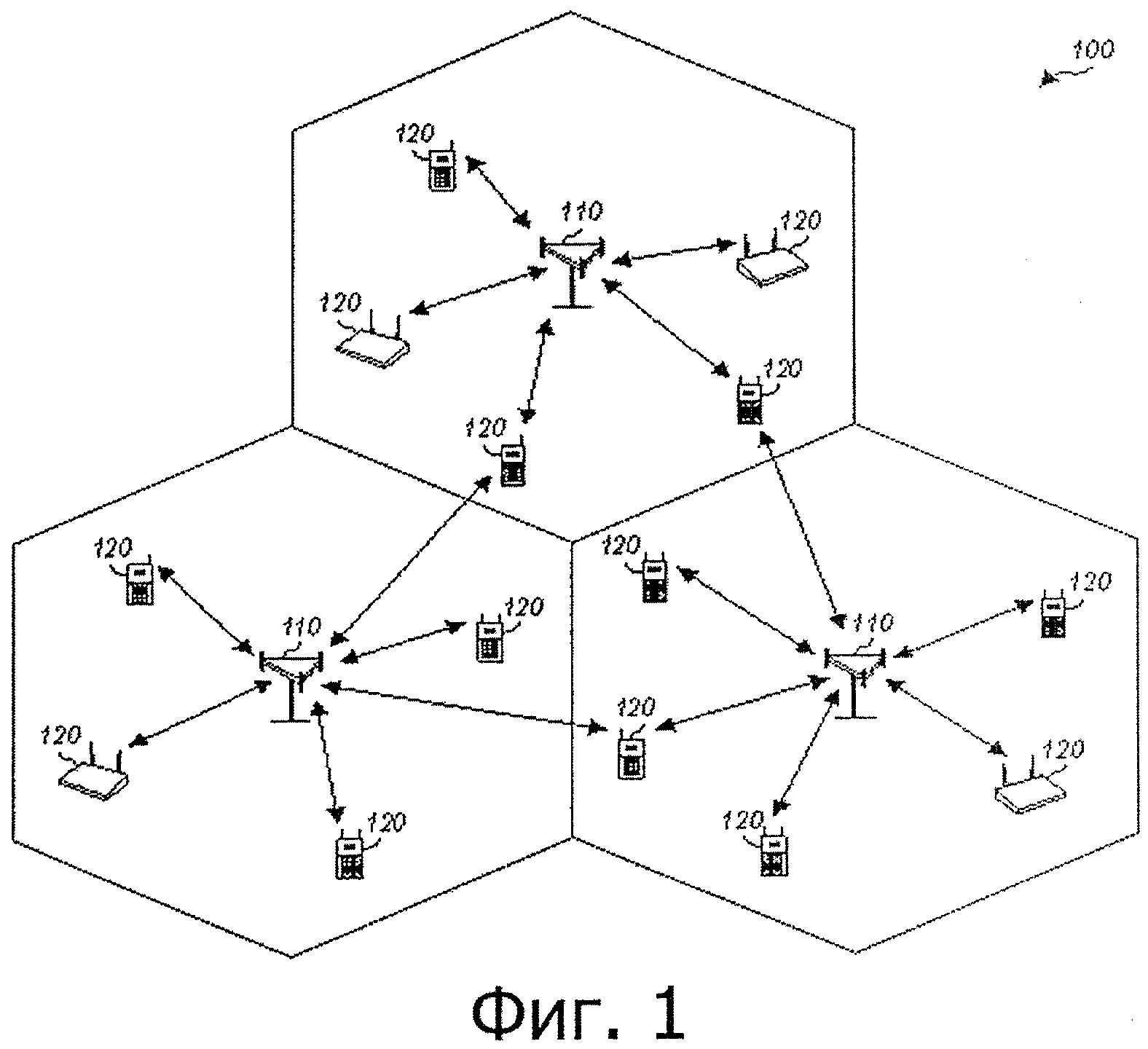
Фигура 1 представляет систему радиосвязи.
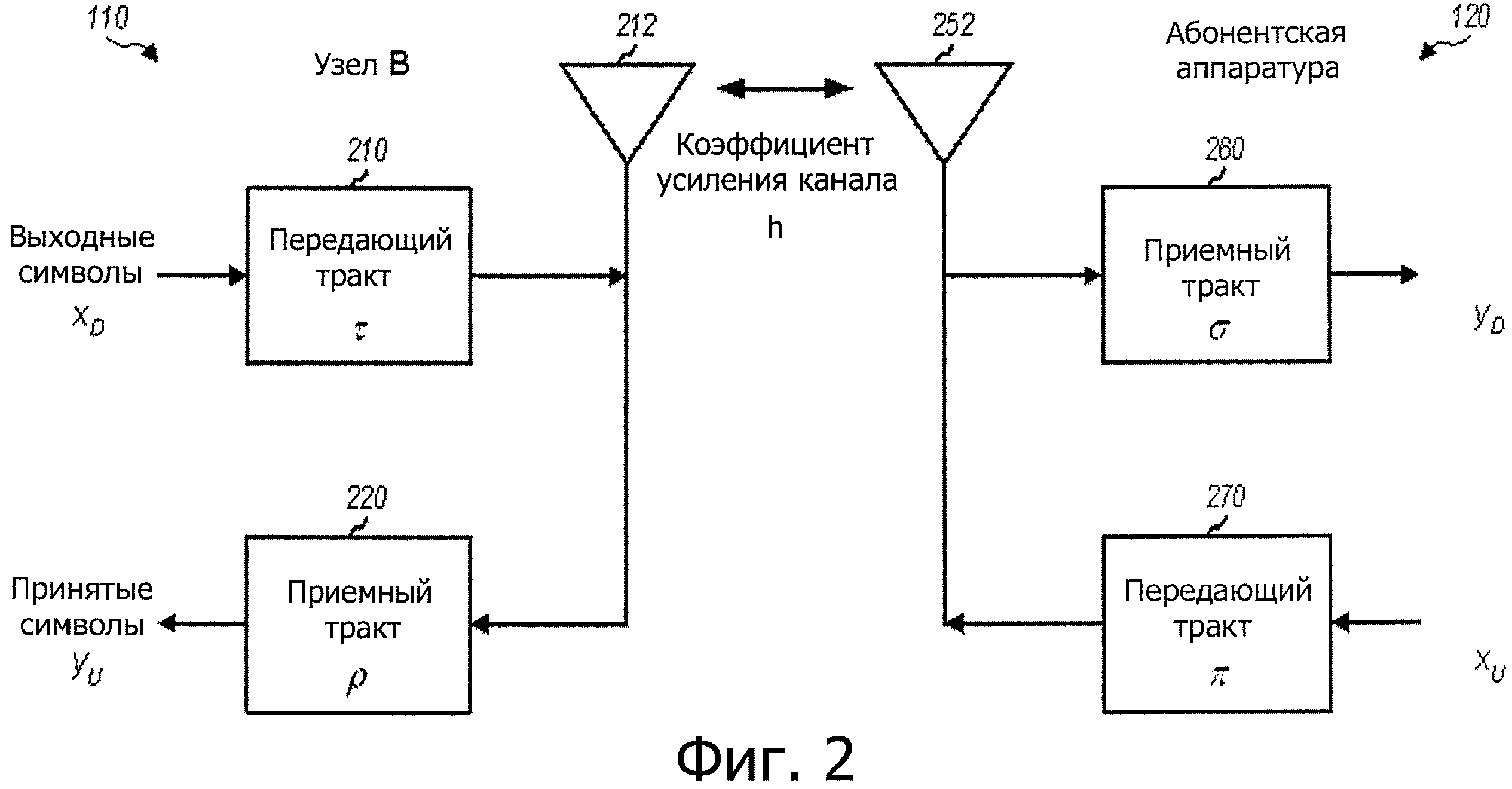
Фигура 2 представляет передающие и приемные тракты в Узле B и в аппаратуре UE.
Фигура 3 представляет Узел B и несколько единиц аппаратуры UE для калибровки.
Фигура 4 представляет прием данных с калибровкой и без.
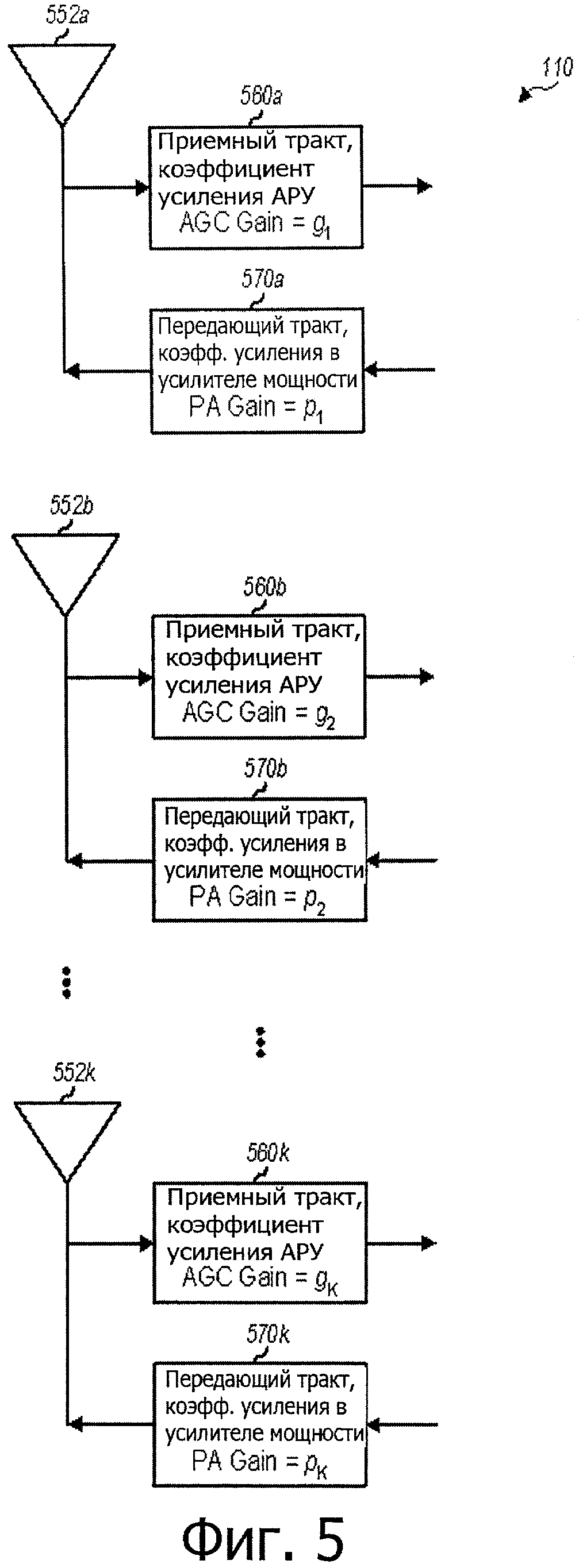
Фигура 5 представляет аппаратуру UE с разбалансом коэффициентов усиления между несколькими антеннами.
Фигура 6 представляет процесс выполнения калибровки Узлом B.
Фигура 7 представляет процесс выполнения калибровки в калибровочном интервале.
Фигура 8 представляет устройство для проведения калибровки.
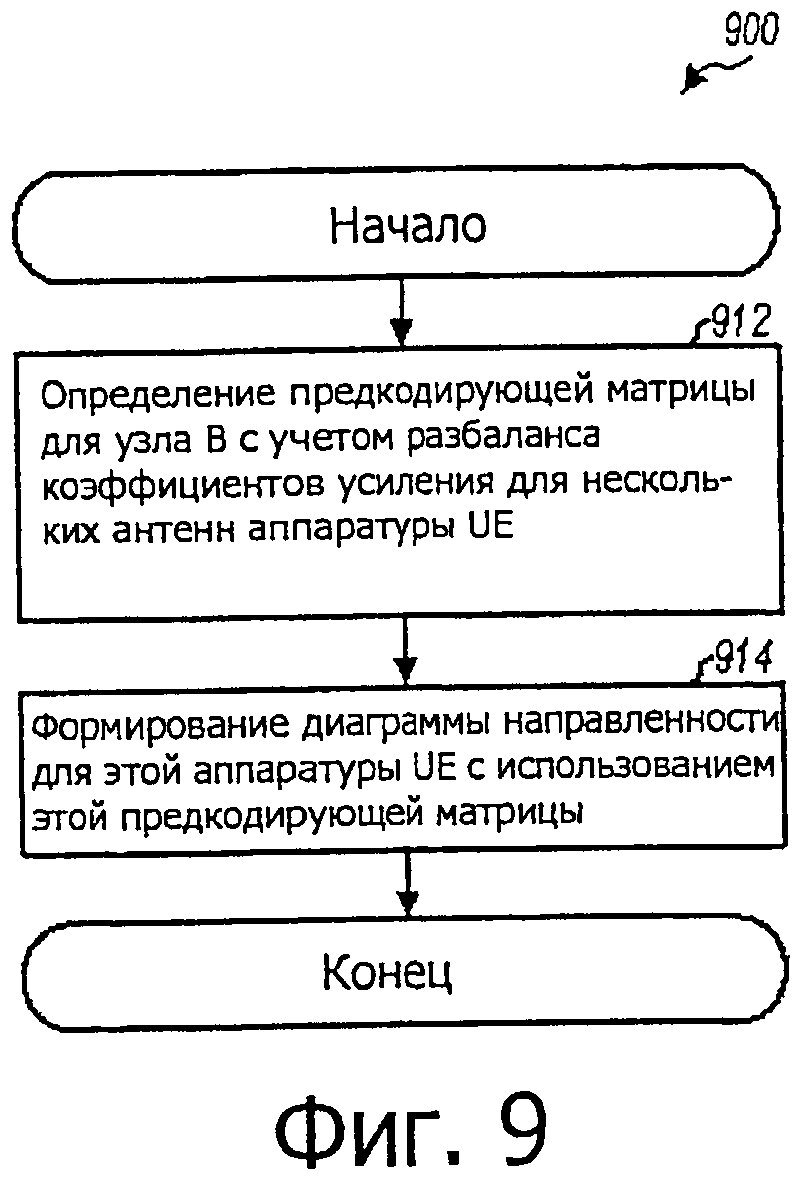
Фигура 9 представляет процесс формирования диаграммы направленности в Узле B.
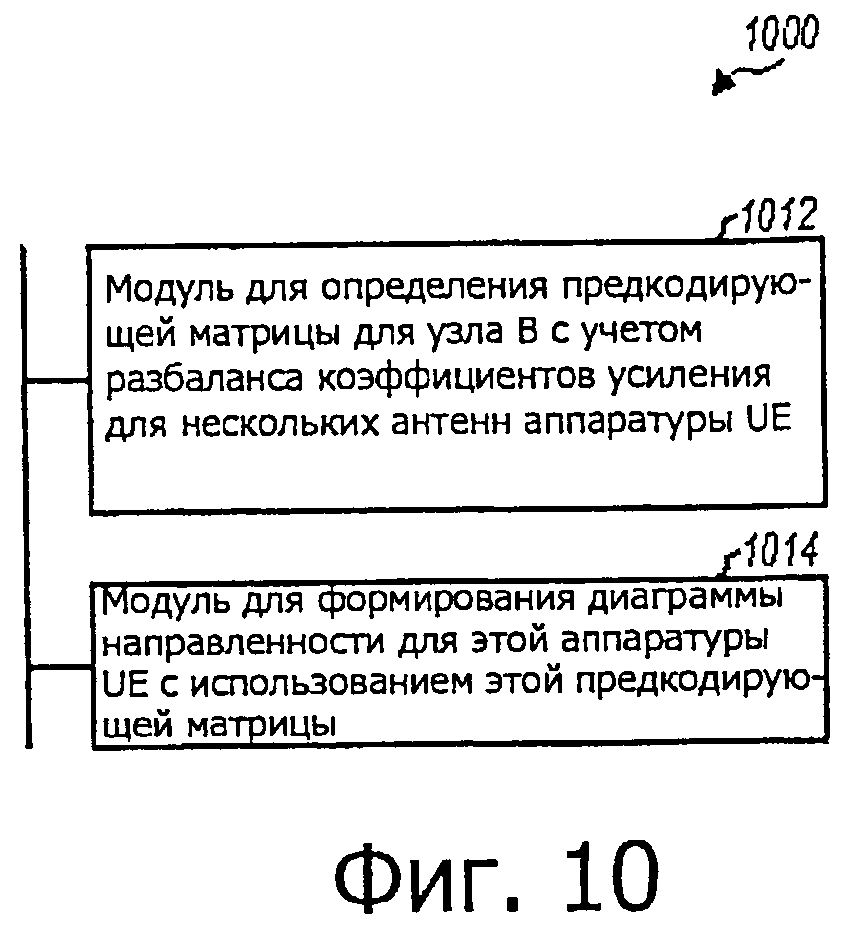
Фигура 10 представляет устройство для формирования диаграммы направленности.
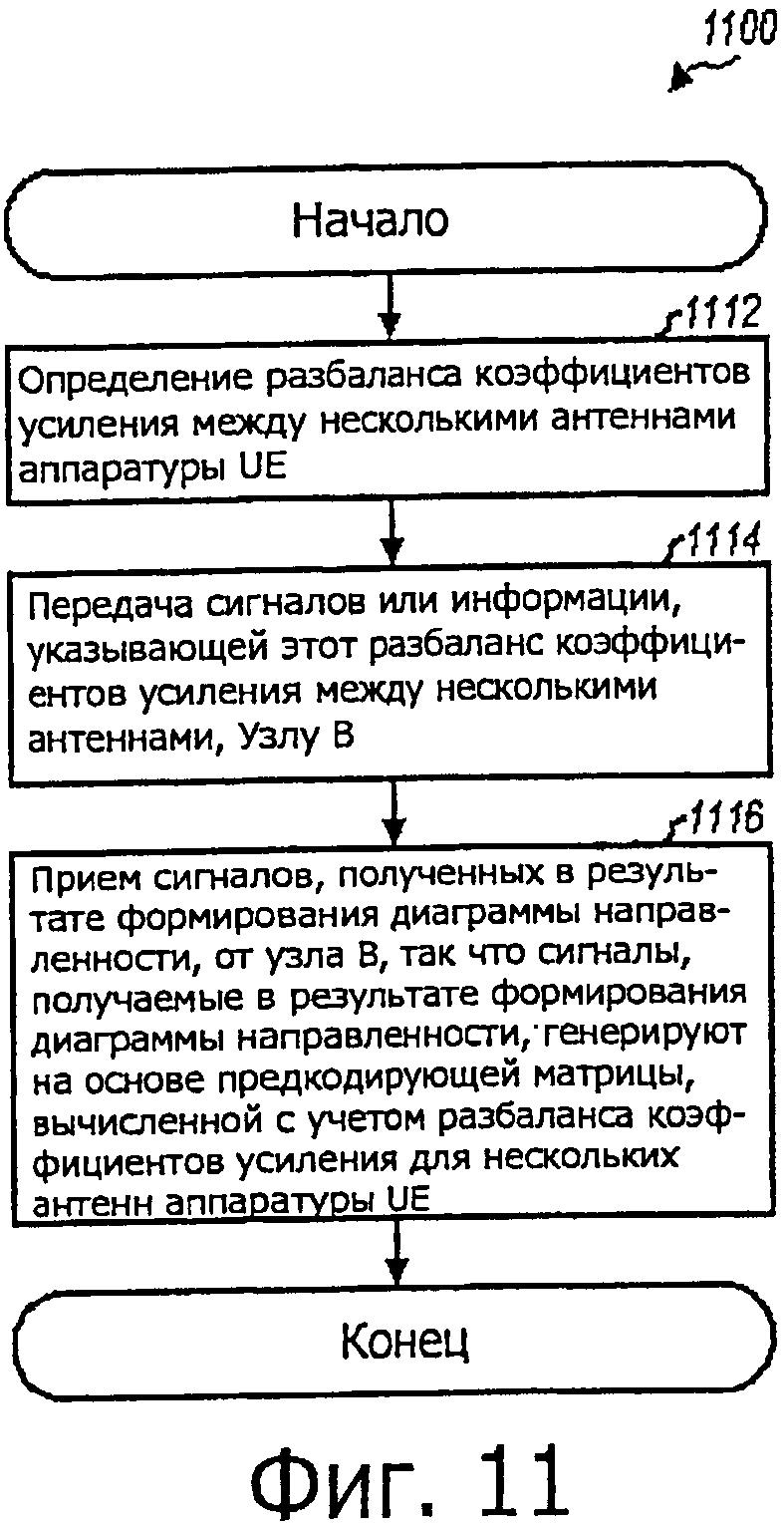
Фигура 11 представляет процесс приема данных со сформированной диаграммой направленности в аппаратуре UE.
Фигура 12 представляет устройство для приема данных со сформированной диаграммой направленности.
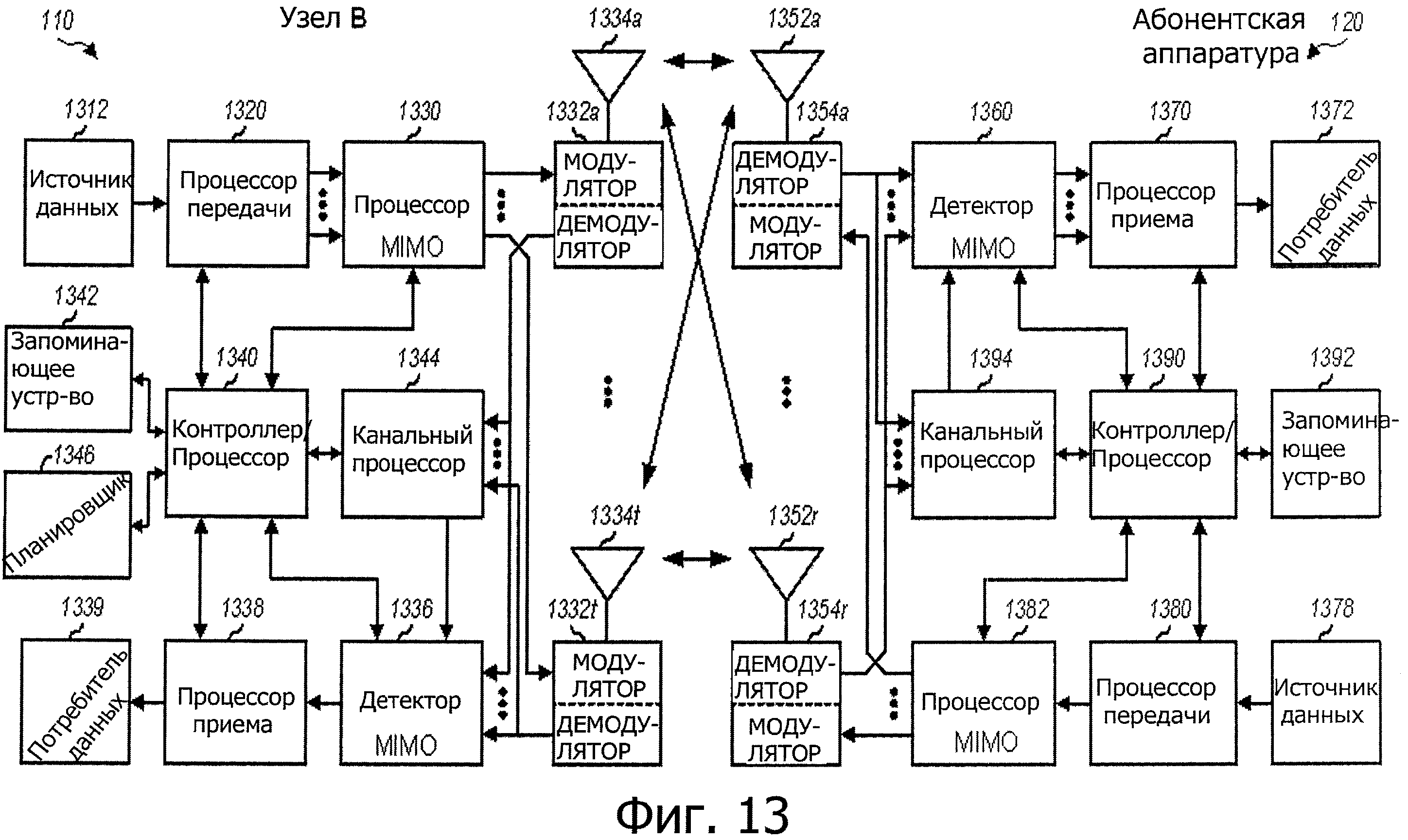
Фигура 13 представляет блок-схему Узла B и аппаратуры UE.
Подробное описание изобретения
Способы, описываемые здесь, могут быть использованы в различных системах радиосвязи, таких как CDMA, TDMA, FDMA, OFDMA, SC-FDMA и другие системы. Термины «система» и «сеть» часто используют как взаимозаменяемые. Система CDMA может применять технологию радиосвязи, например универсальный, наземный радиодоступ (UTRA), cdma2000, и т.п. Система UTRA включает Широкополосный-CDMA (W-CDMA) и другие варианты CDMA. Система cdma2000 охватывает стандарты IS-2000, IS-95 и IS-856. Система TDMA также может применять технологию радиосвязи, например глобальной системы мобильной связи (GSM). Система OFDMA может применять технологию радиосвязи, например Развитую UTRA (E-UTRA), Ультраширокополосную мобильную (Ultra Mobile Broadband (UMB)), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM®, etc. Системы UTRA и E-UTRA представляют собой часть универсальной мобильной телекоммуникационной системы (UMTS). Система 3GPP Long Term Evolution (LTE) представляет новую, развитую версию системы UMTS, применяющей E-UTRA, которая использует OFDMA в нисходящей линии и SC-FDMA в восходящей линии. Системы UTRA, E-UTRA, UMTS, LTE и GSM описаны в документах, выпущенных организацией, именуемой «Проект партнерства третьего поколения» (3GPP). Системы CDMA2000 и UMB описаны в документах, выпущенных организацией, именуемой «Проект партнерства третьего поколения 2» (3GPP2). Для ясности, некоторые аспекты предлагаемых способов описаны ниже применительно к LTE и в приведенном ниже описании широко применяется терминология LTE.
На фиг.1 показана система 100 радиосвязи, которая может быть системой LTE. Система 100 может включать несколько Узлов B 110 и других сетевых объектов. Узел B может быть стационарной станцией, поддерживающей связь со станциями аппаратуры UE, и может также называться развитым Узлом B (eNB), базовой станцией, точкой доступа и т.п. Каждый Узел B 110 обеспечивает связью конкретную географическую область. Для повышения емкости системы общая зона обслуживания Узла B может быть разделена на несколько (например, три) меньшие зоны. Каждую меньшую зону может обслуживать соответствующая подсистема Узла B. В документах 3GPP термин «ячейка» может относиться к наименьшей зоне обслуживания Узла B и/или к подсистеме Узла B, обслуживающей эту зону.
Единицы аппаратуры 120 UE могут быть рассеяны в системе, а каждая единица аппаратуры UE может быть стационарной или мобильной. Аппаратура UE может также называться мобильной станцией, терминалом, терминалом доступа, абонентским устройством, станцией и т.п. Аппаратура UE может быть сотовым телефоном, персональным цифровым помощником (PDA), радиомодемом, станцией радиосвязи, ручным устройством, портативным компьютером, беспроводным телефоном и т.п.
Система может поддерживать формирование диаграммы направленности для передачи данных в нисходящей линии и/или восходящей линии. Для ясности, большая часть приведенного ниже описания относится к формированию диаграммы направленности в нисходящей линии. Формирование диаграммы направленности может быть использовано для передач в системе несколько-входов-один-выход (MISO) от нескольких передающих антенн Узла B на одну приемную антенну аппаратуры UE. Формирование диаграммы направленности для передачи MISO может быть выражено уравнением:

где s - вектор символов данных,
v - предкодирующий вектор для формирования диаграммы направленности, и
x - вектор выходных символов.
Предкодирующий вектор v может также называться вектором формирования диаграммы направленности, управляющим вектором и т.п. Этот предкодирующий вектор v может быть рассчитан на основе вектора h характеристики канала для канала MISO от нескольких передающих антенн Узла B к одной приемной антенне аппаратуры UE. В одном из вариантов предкодирующий вектор v может быть рассчитан по принципу формирования диаграммы направленности с использованием псевдособственных функций на основе вектора h характеристики канала для одного столбца матрицы характеристики канала. Формирование диаграммы направленности может обеспечить более высокое отношение сигнала к шумам и помехам (SINR), что в свою очередь позволит поддерживать более высокие скорости передачи данных.
Принципы формирования диаграммы направленности могут быть также применены для передач по схеме несколько-входов-несколько-выходов (MIMO) от нескольких передающих антенн Узла B нескольким приемным антеннам аппаратуры UE. Такое формирование диаграммы направленности позволяет передавать данные на нескольких собственных модах канала MIMO, образованного несколькими передающими антеннами Узла B и несколькими приемными антеннами аппаратуры UE. Матрица Н канала MIMO может быть приведена к диагональной форме посредством разложения по особым значениям следующим образом:

где U - унитарная матрица левых собственных векторов Н,
V - унитарная матрица правых собственных векторов Н, и
D - диагональная матрица особых значений H.
Формирование диаграммы направленности для передач MIMO, которое может также называться формированием диаграммы направленности с использованием собственных функций, может быть представлено как:

Как видно из уравнения (3), матрица V правых собственных векторов может быть использована в качестве предкодирующей матрицы для формирования диаграммы направленности. Эту предкодирующую матрицу можно также называть матрицей формирования диаграммы направленности, управляющей матрицей и т.п. Передачи с использованием формирования диаграммы направленности могут создавать ощутимый выигрыш по сравнению с передачами без такого формирования, особенно если число уровней (или ранг) передачи меньше числа передающих антенн в Узле В. Такое часто бывает в сценарии с асимметричной антенной структурой, когда число передающих антенн в Узле В больше числа приемных антенн в аппаратуре UE.
Система может поддерживать различные опорные сигналы для нисходящей и для восходящей линий, чтобы облегчить формирование диаграммы направленности и другие функции. Опорный сигнал представляет собой сигнал, генерируемый на основе известных данных, и может называться пилот-сигнал, преамбула, настроечный сигнал, зондирующий сигнал и т.п. Опорный сигнал может быть использован в приемнике для различных целей, например для оценки характеристики канала, когерентной демодуляции, измерения качества канала, измерения уровня мощности сигнала и т.п. В таблице 1 перечислены некоторые опорные сигналы, которые могут быть переданы в нисходящей линии и в восходящей линии, и дано краткое описание каждого опорного сигнала. Опорный сигнал ячейки может также называться общим пилот-сигналом, широкополосным пилот-сигналом и т.п. Опорный сигнал аппаратуры UE может также называться выделенным опорным сигналом.
|
Система может использовать дуплексный режим с разделением времени (TDD). В варианте TDD нисходящая и восходящая линии совместно используют один и тот же частотный спектр или канал, так что передачи и нисходящей, и восходящей линий передают в одном и том же спектре частот. Характеристика канала нисходящей линии может быть коррелирована с характеристикой канала восходящей линии. Принцип взаимности может позволить оценить характеристику канала нисходящей линии на основе передач по восходящей линии. Эти восходящие передачи могут представлять с собой опорные сигналы или восходящие каналы управления (которые могут быть использованы в качестве опорных символов после демодуляции). Восходящие передачи могут позволить оценить характеристику пространственно-избирательного канала через несколько антенн.
В дуплексной системе TDD взаимность канала может иметь место только для радиоканала, который можно также называть физическим каналом распространения сигнала. Здесь может наблюдаться заметная разница между характеристиками или передаточными функциями передающего и приемного трактов в Узле B и характеристиками передающего и приемного трактов в аппаратуре UE. Эффективный/эквивалентный канал может быть составлен из передающего и приемного трактов, как и радиоканал. Такой эффективный канал может не быть взаимным из-за разницы в характеристиках передающих и приемных трактов Узла B и аппаратуры UE.
На фиг.2 показана блок-схема передающих и приемных трактов Узла B 110 и аппаратуры 120 UE, которые могут соответствовать одному из Узлов B и одной из единиц аппаратуры UE на фиг.1. Для нисходящей линии в Узле B выходные символы (обозначенные xD) могут быть обработаны в передающем тракте 210 и переданы через антенну 212 и далее по радиоканалу с характеристикой h. В аппаратуре UE этот нисходящий сигнал может быть принят антеннами 252 и обработан в приемном тракте 260 для получения принятых символов (обозначены yD). Обработка в передающем тракте 210 может включать цифро-аналоговое преобразование, усиление, фильтрацию, преобразование вверх по частоте и т.п. Обработка в приемном тракте 260 может включать преобразование вниз по частоте, усиление, фильтрацию, аналого-цифровое преобразование и т.п.
Для восходящей линии в аппаратуре UE выходные символы (обозначенные хU) могут быть обработаны в передающем тракте 270 и переданы через антенны 252 и далее по радиоканалу. В Узле B эти восходящие сигналы могут быть приняты антеннами 212 и обработаны в приемном тракте 220 для получения принятых символов (обозначены yU).
Для нисходящей линии принятые символы в аппаратуре UE могут быть выражены:

где τ - комплексный коэффициент усиления передающего тракта 210 в Узле В,
σ - комплексный коэффициент усиления приемного тракта 260 в аппаратуре UE, и
hD=σ·h·τ - эффективный нисходящий канал из Узла B к аппаратуре UE.
Для восходящей линии принятые символы в Узле B могут быть выражены:

где π - комплексный коэффициент усиления передающего тракта 270 в аппаратуре UE,
ρ - комплексный коэффициент усиления приемного тракта 220 в Узле В, и
hU=ρ·h·π - эффективный восходящий канал от аппаратуры UE к Узлу B.
Как показано в уравнениях (4) и (5), можно предположить, что радиоканал h является взаимным с точки зрения нисходящей и восходящей линий. Однако эффективный восходящий канал может оказаться невзаимным относительно эффективного нисходящего канала. Желательно знать характеристики передающих и приемных трактов и их влияние на степень точности предположения о взаимности эффективных нисходящего и восходящего каналов. Более того, Узел B и/или аппаратура UE могут быть оснащены антенной решеткой, где каждая антенна может иметь собственные передающие/приемные тракты. Передающие/приемные тракты для разных антенн могут иметь разные характеристики, так что может быть выполнена калибровка антенной решетки для учета этого различия характеристик.
В общем случае, калибровка может рассматривать два вида рассогласований, имеющих место в антенных решетках:
- Рассогласования из-за физической конструкции антенной системы - эти рассогласования включают влияния взаимной связи между антеннами, влияния антенной мачты, неточность знания расположения антенн, рассогласования амплитуд и фаз из-за влияния антенных кабелей и т.п. и
- Рассогласования, обусловленные элементами аппаратуры передающих/приемных трактов для каждой антенны - эти рассогласования включают аналоговые фильтры, разбаланс синфазной (I) и квадратурной (Q), рассогласование фаз и коэффициентов усиления малошумящих усилителей (МШУ (LNA)) и/или усилителей мощности (РА) в передающих трактах, различные нелинейные эффекты и т.п.
Калибровку можно выполнять таким образом, чтобы характеристику канала в одной линии можно было оценить путем измерения опорного сигнала, переданного в другой линии. При калибровке можно также учесть переключение антенн восходящей линии, которое можно использовать для достижения разнесения при передаче в восходящей линии, если аппаратура UE оснащена двумя антеннами, двумя приемными трактами, но только одним приемным трактом. Переключение антенн в восходящей линии можно использовать для реализации разнесения при передаче с переключением по времени (TSTD) или избирательного разнесения при передаче (STD). Восходящие сигналы можно передавать (i) поочередно через две антенны в режиме TSTD или (ii) через лучшую антенну в режиме STD. В режиме STD аппаратура UE может передавать зондирующий опорный сигнал (SRS) поочередно через две антенны, чтобы Узел B мог выбрать лучшую антенну. Высокочастотный (RP) переключатель может поддерживать режим TSTD или STD путем соединения выхода усилителя мощности РА только с одной из двух антенн в каждый момент времени.
Формирование диаграммы направленности в дуплексном режиме с разделением времени (TDD) можно поддерживать следующим образом. Единицы аппаратуры UE, работающие в режиме формирования диаграммы направленности, могут быть конфигурированы для передачи зондирующих опорных сигналов в восходящей линии. В симметричных сценариях с взаимными нисходящей и восходящей линиями Узел B может рассчитать предкодирующую матрицу для использования при формировании диаграммы направленности для каждой единицы аппаратуры UE на основе зондирующих опорных сигналов, принятых от этой единицы аппаратуры UE. Таким образом, единицам аппаратуры UE не нужно передавать предкодирующую информацию Узлу B, что может позволить избежать ошибок обратной связи. Узел B может передать опорный сигнал аппаратуры UE по нисходящей линии для каждой единицы аппаратуры UE. Этот Узел B может предкодировать опорный сигнал аппаратуры UE с использованием той же предкодирующей матрицы, которая применяется при передаче данных, и передавать предкодированный опорный сигнал в каждом блоке ресурсов, используемом для передачи. Аппаратура UE может использовать этот предкодированный опорный сигнал для демодуляции, так что ей может и не потребоваться знание предкодирующей матрицы, использованной в Узле В. Это может позволить обойтись без передачи индикатора предкодирующей матрицы (PMI) по нисходящей линии аппаратуре UE.
Процедура формирования диаграммы направленности может быть упрощена для симметричного и асимметричного сценариев при взаимных нисходящей и восходящей линиях. Здесь можно произвести калибровку для определения калибровочного вектора, способного учесть различия характеристик передающего и приемного трактов, чтобы сделать нисходящий канал взаимным относительно восходящего канала.
Процедура калибровки может быть инициирована Узлом B и проведена с участием группы единиц аппаратуры UE. Последующее описание предполагает, что передающие и приемные тракты Узла B и станций аппаратуры UE имеют плоские характеристики на группе из нескольких последовательных поднесущих для каждой передающей антенны, а полоса когерентности равна числу поднесущих, назначенных каждой передающей антенне для зондирования. Это позволяет получить характеристику канала на основе опорного сигнала.
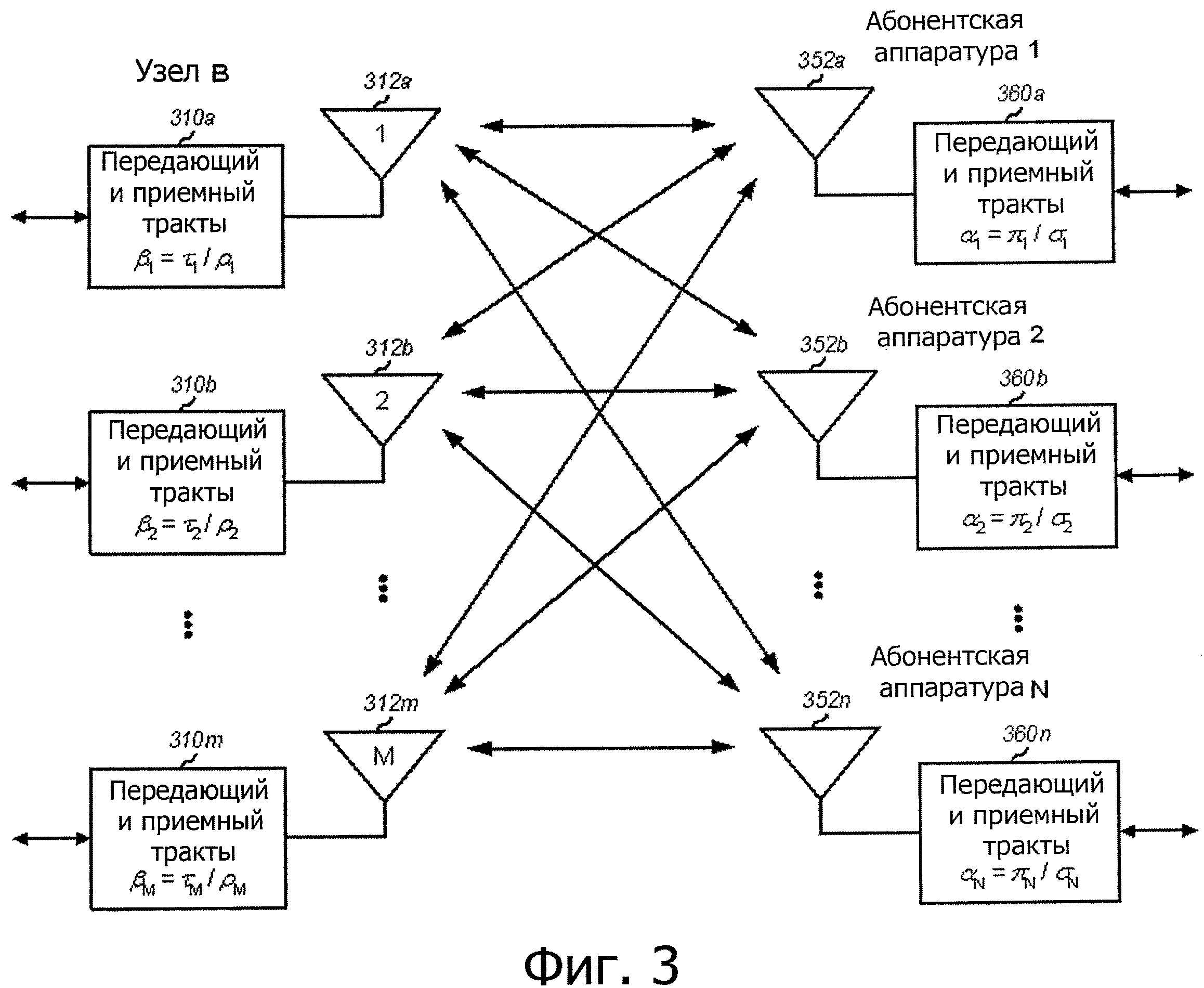
На фиг.3 показана блок-схема Узла B и N станций аппаратуры UE с 1 по N для калибровки. Узел B имеет M приемопередающих трактов с 310а по 310m для M антенн с 312а по 312m, соответственно. В общем случае, каждая единица аппаратуры UE может иметь одну или несколько антенн. Для целей калибровки каждую антенну данной единицы аппаратуры UE можно рассматривать в качестве отдельной единицы аппаратуры UE. На фиг.3 каждая единица аппаратуры UE имеет передающий и приемный тракты 360 для одной антенны 352.
Для каждой i антенны Узла B можно определить эффективное рассогласование βi следующим образом:

где τi - комплексный коэффициент усиления передающего тракта для i антенны в Узле B, и
ρi - комплексный коэффициент усиления приемного тракта для i антенны в Узле B. Для единицы аппаратуры UE j эффективное рассогласование αj можно определить следующим образом:

где πi - комплексный коэффициент усиления передающего тракта для единицы аппаратуры UE j, и
σi - комплексный коэффициент усиления приемного тракта для единицы аппаратуры UE j.
Нисходящий канал от i антенны Узла B к единице аппаратуры UE j можно обозначить  . Восходящий канал от единицы аппаратуры UE j к i антенне Узла B можно обозначить
. Восходящий канал от единицы аппаратуры UE j к i антенне Узла B можно обозначить  . Вследствие взаимности канала TDD,
. Вследствие взаимности канала TDD,  для всех значений i и j.
для всех значений i и j.
Можно оценить величины эффективных рассогласований с β1 по βM для M антенн Узла B для калибровки этого Узла B. При этом калибровка аппаратуры UE может оказаться ненужной. Однако единицы аппаратуры UE должны правильно передавать зондирующие опорные сигналы для калибровки и формирования диаграммы направленности, как описано ниже.
Характеристика эффективного нисходящего канала  от i антенны Узла B к единице аппаратуры UE j может быть выражена:
от i антенны Узла B к единице аппаратуры UE j может быть выражена:

Единица аппаратуры UE j может оценить эту характеристику эффективного нисходящего канала на основе опорного сигнала ячейки, переданного от каждой антенны Узла B в нисходящую линию.
Характеристика эффективного восходящего канала  от единицы аппаратуры UE j к i антенне Узла B может быть выражена:
от единицы аппаратуры UE j к i антенне Узла B может быть выражена:

Узел B может оценить характеристику эффективного восходящего канала на основе зондирующего опорного сигнала, переданного аппаратурой UE j по восходящей линии.
Коэффициент калибровки cij для i антенны Узла B и единицы аппаратуры UE j может быть выражен:

Уравнение (10) предполагает свойство взаимности радиоканала, так что  =
= .
.
Калибровочный вектор Cj может быть получен для единицы аппаратуры UE j, следующим образом:

Узел B может быть откалиброван для получения масштабного коэффициента, после этого калибровочный вектор  может быть определен следующим образом:
может быть определен следующим образом:

Как показано в уравнении (12), элементы калибровочного вектора
не зависят от индекса j, даже несмотря на то, что они получены на основе измерений для единицы аппаратуры UE j. Это означает, что калибровочный вектор, применяемый к Узлу B, не должен учитывать рассогласование в единицах аппаратуры UE. Узел B может получить N калибровочных векторов с  по
по  для N единиц аппаратуры UE. Этот Узел B может рассчитать окончательный калибровочный вектор С следующим образом:
для N единиц аппаратуры UE. Этот Узел B может рассчитать окончательный калибровочный вектор С следующим образом:

где f( ) может быть функцией простого усреднения N калибровочных векторов или функцией суммирования этих N калибровочных векторов с использованием минимальной среднеквадратической ошибки (MMSE) или некоторыми другими способами. Если коэффициент усиления канала  или
или  слишком мал, калибровка может оказаться неточной из-за усиления шумов. Для лучшего суммирования N калибровочных векторов с разными шумовыми характеристиками можно использовать схему вычисления MMSE.
слишком мал, калибровка может оказаться неточной из-за усиления шумов. Для лучшего суммирования N калибровочных векторов с разными шумовыми характеристиками можно использовать схему вычисления MMSE.
В одном из вариантов калибровка может быть выполнена следующим образом:
1. Узел B принимает решение выполнить калибровку и выбирает N единиц аппаратуры UE с высокими значениями индикатора качества канала (CQI) и относительно небольшим доплеровским сдвигом для калибровки.
2. Узел B передает этим N единицам аппаратуры UE сообщения для перехода в режим калибровки.
3. Каждая единица аппаратуры UE измеряет опорный сигнал ячейки от каждой антенны Узла B для получения оценки характеристики эффективного нисходящего канала для этой антенны. Эта единица аппаратуры UE может выбрать опорный сигнал ячейки, ближайший к следующей передаче зондирующего опорного сигнала этой единицей аппаратуры UE с учетом времени обработки сигнала в аппаратуре UE.
4. Каждая единица аппаратуры UE передает оценку характеристики эффективного нисходящего канала для каждой антенны Узла B назад этому Узлу с использованием достаточного числа битов (например, 6-бит квантование действительной/мнимой части), а также передает зондирующий опорный сигнал в это же время.
5. Узел B измеряет зондирующий опорный сигнал от каждой антенны аппаратуры UE для получения оценки характеристики эффективного восходящего канала для этой антенны UE и вычисляет коэффициент cij калибровки для каждой антенны Узла B согласно уравнению (10). Узел B может также получить коэффициент cij с использованием оценки MMSE.
6. Узел B определяет калибровочный вектор  для каждой аппаратуры UE согласно уравнению (12).
для каждой аппаратуры UE согласно уравнению (12).
7. Узел B вычисляет калибровочный вектор C для себя на основе калибровочных векторов  для всех единиц аппаратуры UE, как показано в уравнении (13).
для всех единиц аппаратуры UE, как показано в уравнении (13).
8. Узел B выходит из режима калибровки после достижения удовлетворительного результата калибровки.
Аппаратура UE также может выполнить калибровку с целью получить калибровочный вектор для самой себя. С этой целью аппаратура UE может осуществлять калибровку с одним Узлом B в разные моменты времени и/или с разными Узлами B для повышения качества калибровочного вектора.
Станция (например, Узел B или аппаратура UE) может получить калибровочный вектор путем выполнения калибровки и может применить подходящую версию калибровочного вектора на передающей стороне или на приемной стороне. При использовании калибровочного вектора можно оценить характеристику канала в одной линии на основе опорного сигнала, принятого в другой линии. Например, Узел B может оценить характеристику нисходящего канала на основе зондирующего опорного сигнала, принятого от аппаратуры UE по восходящей линии. После этого Узел B может осуществить формирование диаграммы направленности на основе предкодирующего вектора(ов), рассчитанного на основе оценки характеристики нисходящего канала. Применение калибровочного вектора должно упростить оценку характеристики канала и не должно оказать неблагоприятного воздействия на характеристики передачи данных.
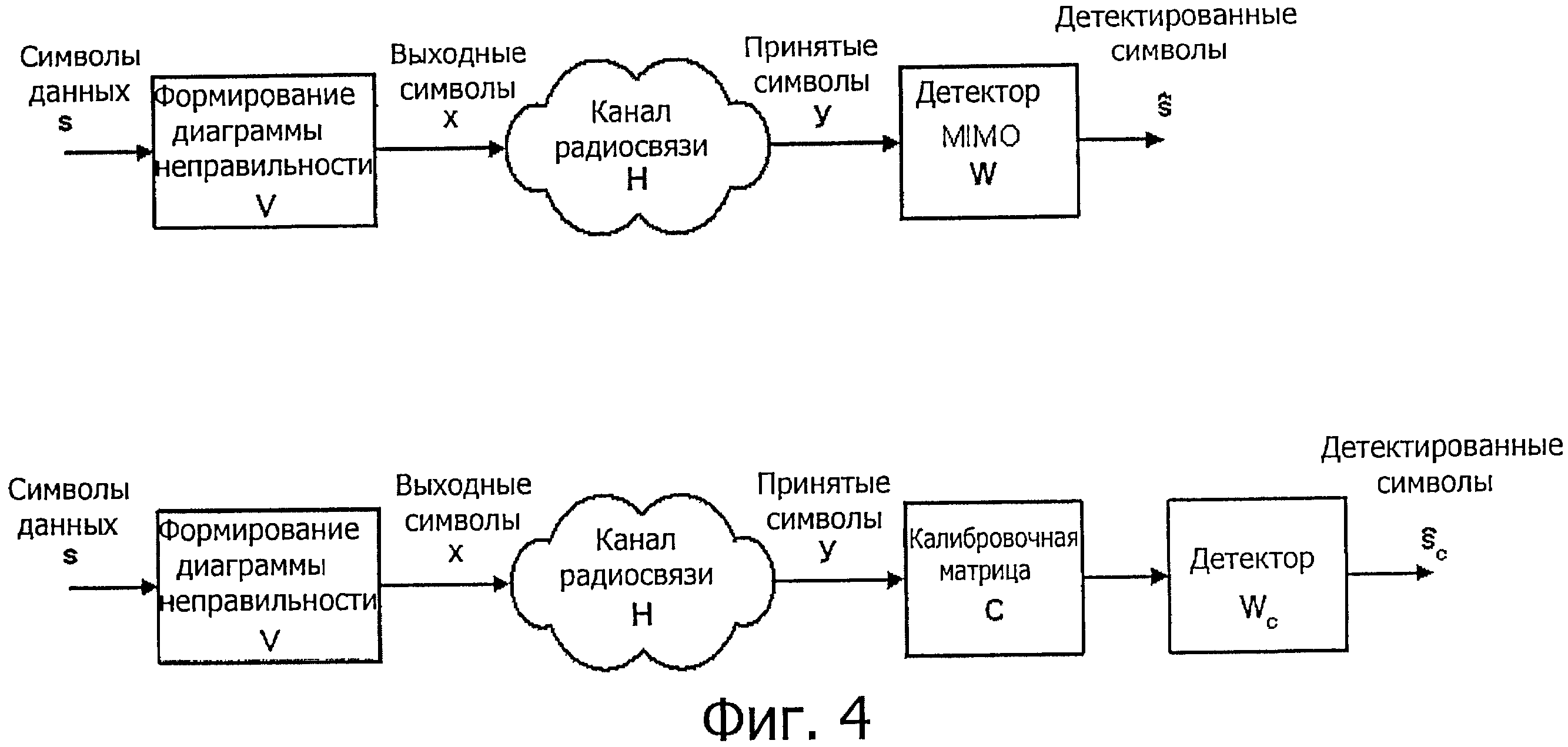
На фиг.4 представлены передача данных с использованием формирования диаграммы направленности и прием данных с применением калибровки и без. Для простоты фиг.4 предполагает, что передатчик (например, Узел B или аппаратура UE) не имеет рассогласования между передающим и приемным трактами и может считаться идентичным/без калибровки.
В верхней половине фиг.4 изображен приемник (например, аппаратура UE или Узел B) без калибровки. Символы данных от передатчика предкодируют с применением матрицы V формирования диаграммы направленности и передают по каналу MIMO с канальной матрицей Н. Принятые символы в приемнике могут быть выражены:

где s - вектор символов данных, переданных посредством передатчика,
y - вектор принятых символов в приемнике, и
n - вектор шумов.
Приемник может выполнять MIMO детектирование с применением матрицы W пространственной фильтрации следующим образом:

где  - вектор детектированных символов, представляющий собой оценку s.
- вектор детектированных символов, представляющий собой оценку s.
Матрица W пространственной фильтрации может быть определена с использованием MMSE следующим образом:

где Ψ=E[nnH] ковариационная матрица шумов в приемнике,
E[] означает операцию ожидания, и
“H” обозначает сопряженное транспонирование.
В нижней половине фиг.4 изображен приемник с калибровкой. Принятые символы в приемнике могут иметь вид, показанный в уравнении (14). Приемник может выполнять детектирование MIMO с использованием матрицы Wc пространственной фильтрации следующим образом:

где C - калибровочная матрица в приемнике и  - оценка s. Калибровочная матрица C является диагональной матрицей, а диагональные элементы матрицы C могут быть равны элементам калибровочного вектора приемника.
- оценка s. Калибровочная матрица C является диагональной матрицей, а диагональные элементы матрицы C могут быть равны элементам калибровочного вектора приемника.
Матрица Wc пространственной фильтрации может быть получена с использованием алгоритма MMSE следующим образом:

Как показывают уравнения (17) и (18), полученная с применением алгоритма MMSE матрица Wc пространственной фильтрации пытается разложить сложный канал Hc=CH, имеющий ковариационную матрицу окрашенного шума Σ=CΨCH. Если в приемнике использован MMSE-детектор, детектированные символы от приемника с калибровкой равны детектированным символам от приемника без калибровки.
Фазы приемных антенн не влияют на характеристики передач, использующих формирование диаграммы направленности. Однако при формировании диаграммы направленности следует учитывать относительные мощности передач различных антенн аппаратуры UE, равно как и разбаланс усиления в приемных трактах единиц этой аппаратуры UE.
На фиг.5 показана блок-схема аппаратуры 110 UE с K антеннами с 552a по 552k, где K может быть любым числом больше 1. С этими K антеннами с 552a по 552k соединены K приемных трактов с 560a по 560k, соответственно, и K передающих трактов с 570a по 570k, соответственно.
Аппаратура UE может выполнять автоматическую регулировку усиления (АРУ (AGC)) в каждом приемном тракте 560 и может подстраивать коэффициент усиления в каждом приемном тракте таким образом, чтобы дисперсии шумов во всех K приемных трактах оказались приблизительно равны. Аппаратура UE может с применением АРУ получить коэффициенты усиления с g1 по gK для K приемных трактов с 560a по 560k, соответственно. Эти коэффициенты усиления АРУ могут отличаться для разных антенн и могут периодически изменяться. Аппаратура UE может быть способна точно измерить коэффициент усиления системы АРУ для каждой антенны на основе результатов измерений уровня мощности принимаемого сигнала в этой антенне.
В одной конструкции аппаратура UE может определять относительный коэффициент усиления приемника для каждой антенны k следующим образом:

где rk - относительный коэффициент усиления антенны k в аппаратуре UE.
В одном варианте аппаратура UE может передавать данные об относительных коэффициентах усиления приема Узлу B, который может учитывать эти относительные коэффициенты при формировании диаграммы направленности. Например, Узел B может определять составную канальную матрицу HD нисходящего MIMO-канала следующим образом:

где R - диагональная матрица, на диагонали которой расположены K относительных коэффициентов усиления с r1 по rK приемника. Узел B может выполнить разложение по особым значениям для этой составной канальной матрицы HD нисходящего MIMO-канала (вместо матрицы H нисходящего MIMO-канала) для получения предкодирующей матрицы V.
В другом варианте аппаратура UE может применить подходящие коэффициенты усиления в передающих трактах при передаче зондирующих опорных сигналов, чтобы Узел B мог получить оценку составной канальной матрицы HD нисходящего MIMO-канала вместо канальной матрицы H нисходящего MIMO-канала. Аппаратура UE может масштабировать коэффициент усиления передающего тракта для каждой антенны k в соответствии с относительным коэффициентом усиления rk приемного тракта для этой антенны. Например, если относительный коэффициент усиления приемного тракта для данной антенны равен 1,5, аппаратура UE может масштабировать коэффициент усиления передающего тракта для этой антенны с коэффициентом 1,5.
Как показано на фиг.5, аппаратура UE может иметь коэффициенты усиления с p1 по pK в усилителях мощности (РА) для K передающих трактов с 570a по 570k, соответственно. Аппаратура UE может иметь известный разбаланс усиления в передающих трактах и/или в антеннах. Например, один из передающих трактов может иметь меньший усилитель мощности РА, чем другой передающий тракт. В другом примере, могут быть разными коэффициенты усиления двух антенн, например из-за различия типов антенн. Аппаратура UE может определить относительный коэффициент усиления передающего тракта для каждой антенны k следующим образом:

где ak - коэффициент усиления антенны k в аппаратуре UE,
pk - коэффициент усиления усилителя мощности РА в передающем тракте антенны k в аппаратуре UE, и
tk - относительный коэффициент усиления передающего тракта для антенны k в аппаратуре UE.
Этот относительный коэффициент усиления передающего тракта tk обычно равен 1, хотя может и отличаться от 1 из-за наличия разбаланса усиления в передающих трактах и/или антеннах аппаратуры UE.
В одном из вариантов аппаратура UE может сообщать об известном разбалансе усиления Узлу B, например, в фазе определения возможностей. Узел B может учитывать известный разбаланс усиления в аппаратуре UE во время калибровки и формирования диаграммы направленности. Например, Узел B может получить оценку составной канальной матрицы HU восходящего MIMO-канала на основе зондирующих опорных сигналов, принимаемых от аппаратуры UE. Эта матрица HU может быть выражена:

где T - диагональная матрица, на диагонали которой расположены K относительных коэффициентов усиления передачи с t1 по tK. Узел B может затем исключить матрицу T для получения матрицы H канала MIMO.
В другом варианте аппаратура UE может применять подходящие коэффициенты усиления в передающих трактах при передаче зондирующих опорных сигналов, чтобы Узел B мог получить оценку канальной матрицы H канала MIMO вместо составной канальной матрицы HU восходящего MIMO-канала. Аппаратура UE может масштабировать коэффициент усиления передающего тракта каждой антенны k путем умножения на обратную величину относительного коэффициента tk усиления передачи для этой антенны. Например, если относительный коэффициент усиления передачи для данной антенны равен 2,0, тогда аппаратура UE может масштабировать коэффициент усиления этого передающего тракта с коэффициентом 0,5.
В общем случае Узел B и/или аппаратура UE могут учитывать разницу коэффициентов усиления АРУ между разными приемными трактами, разницу коэффициентов усиления усилителей мощности РА между разными передающими трактами и/или разницу коэффициентов усиления антенн между разными антеннами аппаратуры UE. Передача зондирующих опорных сигналов при пониженной мощности может ухудшить качество оценки характеристики канала. В случае небольших усилителей мощности РА может оказаться невозможным передавать сигнал при более высокой мощности из-за требований к потере мощности. В таких случаях аппаратура UE может передавать Узлу B данные об относительных коэффициентах усиления приема и/или передачи вместо того, чтобы учитывать эти данные в самой аппаратуре UE.
В одном варианте формирование диаграммы направленности может происходить следующим образом.
1. Узел B калибрует себя так часто, как это необходимо (например, в каждом калибровочном интервале продолжительностью 1 час или более), с использованием процедуры калибровки, описанной выше, для получения калибровочного вектора для Узла B.
2. Для данной единицы аппаратуры UE Узел B взвешивает коэффициент усиления каждой антенны аппаратуры UE путем умножения на относительный коэффициент усиления tk передачи для этой антенны (если таковой имеется) для учета известного разбаланса усиления аппаратуры UE.
3. Аппаратура UE применяет относительные коэффициенты усиления rk приема при передаче зондирующих опорных сигналов через свои антенны в качестве обратной связи при формировании диаграммы направленности. В альтернативном варианте аппаратура UE может сообщить данные об относительных коэффициентах усиления приема Узлу B, который может учесть эти относительные коэффициенты.
4. Узел B использует калибровочный вектор и возможно относительные коэффициенты усиления приема и/или передачи для формирования диаграммы направленности в направлении аппаратуры UE.
Предкодирующие векторы для формирования диаграммы направленности могут быть действительными до следующего изменения коэффициента усиления АРУ в аппаратуре UE. Аппаратура UE может передавать информацию о разбалансе коэффициентов усиления в приемных трактах, передающих трактах и/или антеннах этой аппаратуры UE возможно вместе с индикаторами качества канала CQI, когда происходят изменения такого разбаланса.
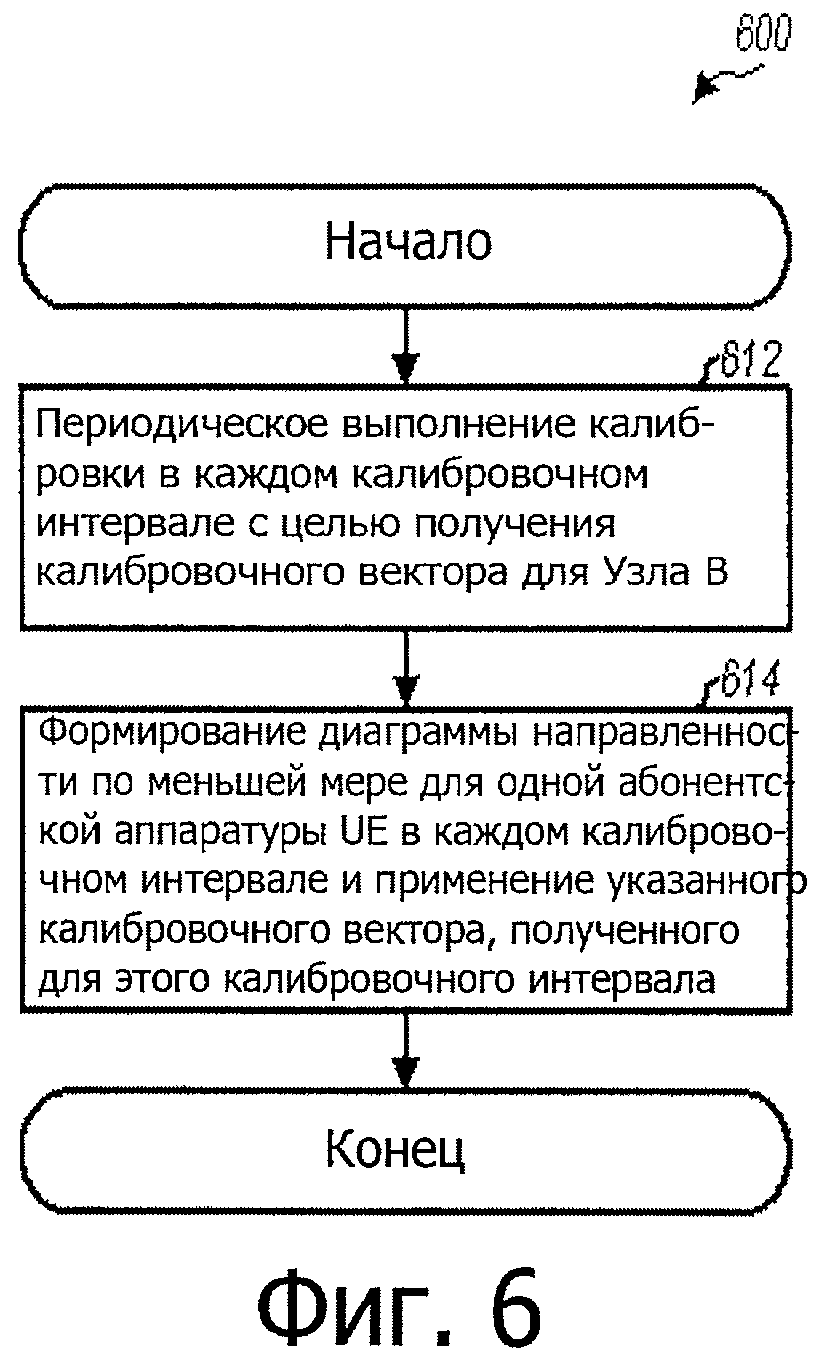
На фиг.6 показан вариант процесса 600 для выполнения калибровки Узлом B. Этот Узел В может периодически производить калибровку в каждом калибровочном интервале для получения калибровочного вектора для этого узла (блок 612). Калибровочный интервал может иметь любую подходящую продолжительность, например 1 час или более. Узел В может формировать диаграмму направленности, по меньшей мере, для одной единицы аппаратуры UE в каждом калибровочном интервале и может применять калибровочный вектор, полученный для этого калибровочного интервала (блок 614).
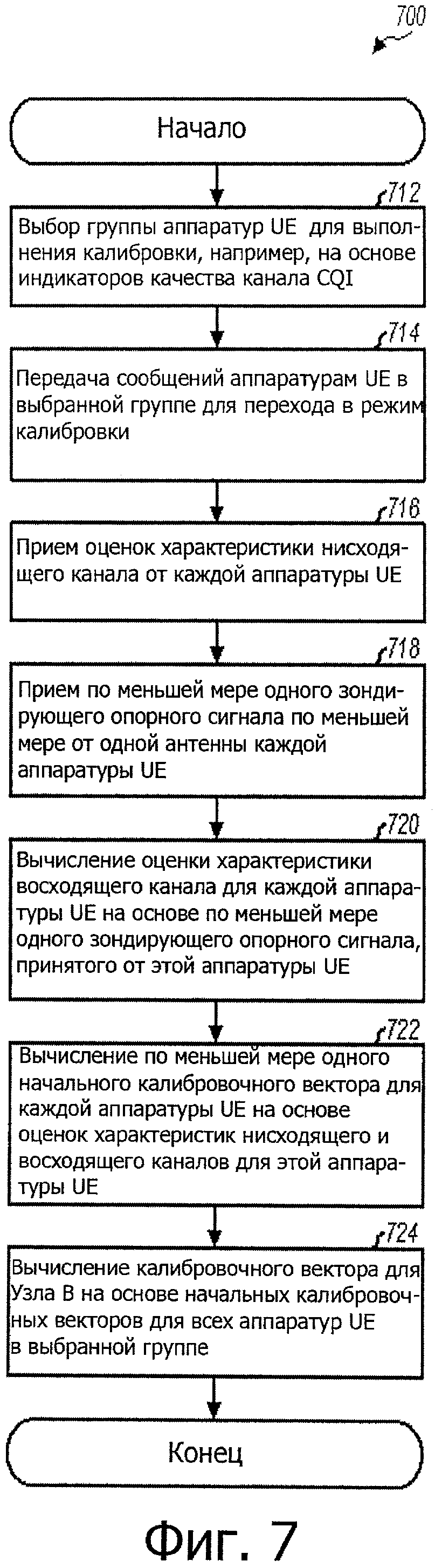
На фиг.7 показан вариант процесса 700 для выполнения калибровки Узлом В в каждом калибровочном интервале. Процесс 700 может быть применен в блоке 612 на фиг.6. Узел В может выбрать группу единиц аппаратуры UE для выполнения калибровки, например на основе индикаторов качества канала (CQI), принимаемых от этих единиц аппаратуры UE (блок 712). Узел В может передать сообщения аппаратуре UE в выбранной группе для перехода в режим калибровки (блок 714). Узел В может принять оценку характеристики нисходящего канала от каждой единицы аппаратуры UE (блок 716) и может также принять, по меньшей мере, один зондирующий опорный сигнал, по меньшей мере, от одной антенны этой аппаратуры UE (блок 718). Узел В может рассчитать оценку характеристики восходящего канала для каждой единицы аппаратуры UE на основе, по меньшей мере, одного зондирующего опорного сигнала, принятого от этой единицы аппаратуры UE (блок 720). Узел В может вычислить, по меньшей мере, один начальный калибровочный вектор для каждой единицы аппаратуры UE на основе оценок характеристик нисходящего и восходящего каналов для этой единицы аппаратуры UE (блок 722). Узел В может затем рассчитать калибровочный вектор для самого себя на основе начальных калибровочных векторов для всех единиц аппаратуры UE в выбранной группе (блок 724).
Для каждой аппаратуры UE оценка характеристики нисходящего канала может содержать, по меньшей мере, один вектор нисходящего канала, по меньшей мере, для одной антенны этой аппаратуры UE. Оценка характеристики восходящего канала может содержать, по меньшей мере, один вектор восходящего канала, по меньшей мере, для одной антенны этой аппаратуры UE. Каждый вектор нисходящего канала может содержать несколько первых коэффициентов усиления (например,  ) для нескольких антенн в Узле В. Каждый вектор восходящего канала может содержать несколько вторых коэффициентов усиления (например,
) для нескольких антенн в Узле В. Каждый вектор восходящего канала может содержать несколько вторых коэффициентов усиления (например,  ) для нескольких антенн в Узле В.
) для нескольких антенн в Узле В.
Начальный калибровочный вектор  может быть вычислен для каждой антенны аппаратуры UE на основе векторов нисходящего и восходящего каналов для этой антенны следующим образом. Несколько элементов (например, cij) ненормированного калибровочного вектора
может быть вычислен для каждой антенны аппаратуры UE на основе векторов нисходящего и восходящего каналов для этой антенны следующим образом. Несколько элементов (например, cij) ненормированного калибровочного вектора  для j антенны аппаратуры UE могут быть определены на основе отношений нескольких первых коэффициентов усиления в составе вектора нисходящего канала к нескольким вторым коэффициентам усиления в составе вектора восходящего канала для j антенны аппаратуры UE, например как показано в уравнении (10). Эти несколько элементов ненормированного калибровочного вектора могут быть масштабированы посредством первого элемента для получения начального калибровочного вектора
для j антенны аппаратуры UE, например как показано в уравнении (12). Калибровочный вектор для Узла B может быть вычислен в функции начальных калибровочных векторов для всех единиц аппаратуры UE в выбранной группе. Это может быть функция усреднения, функция MMSE и т.п.
для j антенны аппаратуры UE могут быть определены на основе отношений нескольких первых коэффициентов усиления в составе вектора нисходящего канала к нескольким вторым коэффициентам усиления в составе вектора восходящего канала для j антенны аппаратуры UE, например как показано в уравнении (10). Эти несколько элементов ненормированного калибровочного вектора могут быть масштабированы посредством первого элемента для получения начального калибровочного вектора
для j антенны аппаратуры UE, например как показано в уравнении (12). Калибровочный вектор для Узла B может быть вычислен в функции начальных калибровочных векторов для всех единиц аппаратуры UE в выбранной группе. Это может быть функция усреднения, функция MMSE и т.п.
На фиг.8 показана структура устройства 800 для выполнения калибровки. Устройство 800 содержит модуль 812 для периодического выполнения калибровки в каждом калибровочном интервале с целью получения калибровочного вектора для Узла B и модуль 814 для формирования диаграммы направленности, по меньшей мере, для одной единицы аппаратуры UE в каждом калибровочном интервале и применения калибровочного вектора, полученного в этом калибровочном интервале.
На фиг.9 представлена структура процесса 900 формирования диаграммы направленности в Узле В. Узел B может определить предкодирующую матрицу с учетом разбаланса коэффициентов усиления для нескольких антенн аппаратуры UE (блок 912). После этого Узел B может сформировать диаграмму направленности для этой аппаратуры UE с использованием предкодирующей матрицы (блок 914).
Согласно одному из сценариев Узел B может определить предкодирующую матрицу с учетом разбаланса коэффициентов усиления из-за различия коэффициентов усиления АРУ для нескольких приемных трактов нескольких антенн аппаратуры UE. В общем случае коэффициенты усиления АРУ могут включать любые регулируемые коэффициенты усиления в приемном тракте. В одном варианте Узел B может получить, по меньшей мере, один относительный коэффициент усиления rk от аппаратуры UE, так что каждый из этих относительных коэффициентов определяется коэффициентом усиления gk АРУ для соответствующей антенны и коэффициентом усиления g1 АРУ для опорной антенны этой аппаратуры UE. Узел B может определить составную канальную матрицу HD на основе канальной матрицы H для аппаратуры UE и матрицы R усиления, построенной с использованием, по меньшей мере, одного относительного коэффициента усиления. Затем Узел B может определить предкодирующую матрицу на основе составной канальной матрицы. В другом варианте Узел B может принимать зондирующие опорные сигналы от нескольких антенн аппаратуры UE. Каждый зондирующий опорный сигнал может быть передан аппаратурой UE через одну антенну с уровнем мощности, определяемым на основе относительного коэффициента усиления rk для этой антенны.
Согласно другому сценарию Узел B может определить предкодирующую матрицу с учетом разбаланса усиления из-за (i) различия коэффициентов усиления в усилителях мощности РА в нескольких передающих трактах нескольких антенн аппаратуры UE и/или (ii) различия коэффициентов усиления этих нескольких антенн. В общем случае коэффициент усиления усилителя мощности РА может включать любой регулируемый коэффициент усиления в передающем тракте. В одном из вариантов Узел B может получить, по меньшей мере, один относительный коэффициент усиления tk от аппаратуры UE, так что каждый из этих относительных коэффициентов определяется коэффициентом усиления pk усилителя мощности РА для соответствующей антенны и коэффициентом усиления p1 усилителя мощности РА для опорной антенны аппаратуры UE. Затем Узел B может определить предкодирующую матрицу на основе указанного, по меньшей мере, одного относительного коэффициента усиления. В другом варианте Узел B может принимать зондирующие опорные сигналы от нескольких антенн аппаратуры UE. Каждый зондирующий опорный сигнал может быть передан аппаратурой UE через одну антенну с уровнем мощности, определяемым на основе относительного коэффициента усиления tk для этой антенны.
На фиг.10 представлена конструкция устройства 1000 для формирования диаграммы направленности. Устройство содержит модуль 1012 для определения предкодирующей матрицы в Узле В с учетом разбаланса коэффициентов усиления между несколькими антеннами аппаратуры UE и модуль 1014 формирования диаграммы направленности для этой аппаратуры UE с использованием предкодирующей матрицы.
На фиг.11 представлена схема процесса 1100 для приема данных аппаратурой UE в соответствии со сформированной диаграммой направленности. Аппаратура UE может определить разбаланс коэффициентов усиления для нескольких своих антенн (блок 1112). Затем аппаратура UE может передать сигналы или информацию о разбалансе коэффициентов усиления между несколькими антеннами Узлу B (блок 1114). После этого аппаратура UE может принять сигналы в соответствии со сформированной диаграммой направленности от Узла B, так что эти сигналы получены на основе предкодирующей матрицы, рассчитанной с учетом разбаланса коэффициентов усиления между несколькими антеннами аппаратуры UE (блок 1116).
Согласно одному из сценариев аппаратура UE может определить, по меньшей мере, один относительный коэффициент усиления rk для нескольких своих антенн, так что каждый из этих относительных коэффициентов определяется коэффициентом усиления АРУ для соответствующей антенны и коэффициентом усиления АРУ для опорной антенны этой аппаратуры UE. Согласно другому сценарию аппаратура UE может определить, по меньшей мере, один относительный коэффициент усиления tk для нескольких своих антенн, так что каждый из этих относительных коэффициентов определяется коэффициентом усиления усилителя мощности РА для соответствующей антенны и коэффициентом усиления усилителя мощности РА для опорной антенны аппаратуры UE. В обоих сценариях в одном из вариантов аппаратура UE может передать, по меньшей мере, один относительный коэффициент усиления Узлу B. В другом варианте аппаратура UE может передавать зондирующие опорные сигналы от нескольких своих антенн, так что каждый зондирующий опорный сигнал может быть передан одной антенной с уровнем мощности, определяемым на основе относительного коэффициента усиления для этой антенны.
На фиг.12 представлена структура устройства 1200 для приема данных в соответствии со сформированной диаграммой направленности. Устройство 1200 включает модуль 1212 для определения разбаланса коэффициентов усиления между несколькими антеннами аппаратуры UE, модуль 1214 для передачи сигналов или информации о разбалансе усиления между несколькими антеннами Узлу B и модуль 1216 для приема сигналов в соответствии со сформированной диаграммой направленности от Узла B, так что эти сигналы получены на основе предкодирующей матрицы, рассчитанной с учетом разбаланса коэффициентов усиления между несколькими антеннами аппаратуры UE.
Модули на фиг.8, 10 и 12 могут содержать процессоры, электронные приборы, элементы аппаратуры, электронные компоненты, логические схемы, запоминающие устройства и т.п. или любые сочетания перечисленных компонентов и устройств.
На фиг.13 показана блок-схема структуры Узла B 110 и аппаратуры 120 UE, которые могут представлять собой один из Узлов B и одну из аппаратур UE, показанных на фиг.1. Узел B 110 оснащен несколькими (Т) антеннами с 1334а по 1334t. Аппаратура 120 UE оснащена одной или несколькими (R) антеннами с 1352а по 1352r.
В Узле B 110 процессор 1320 передачи может принимать данные для одной или нескольких единиц аппаратуры UE от источника 1312 данных, обрабатывать (например, кодировать и модулировать) данные для каждой единицы аппаратуры UE на основе одной или нескольких схем модуляции и кодирования для этой аппаратуры UE и генерировать символы данных для всех единиц аппаратуры UE. Процессор 1320 передачи может также генерировать символы управления передачей информации/сигнализацией. Этот процессор 1320 передачи может далее генерировать опорные символы для одного или нескольких опорных сигналов, например опорных сигналов ячейки. Процессор 1330 MIMO может выполнять предкодирование символов данных, символов управления и/или опорных символов и может генерировать Т выходных потоков символов для Т модуляторов (MOD) с 1332a по 1332t. Каждый модулятор 1332 может обрабатывать свой выходной поток символов (например, для OFDM) с целью получения выходного потока отсчетов. Каждый модулятор 1332 может далее кондиционировать (например, преобразовать в аналоговую форму, фильтровать, усилить и преобразовать вверх по частоте) свой выходной поток отсчетов и генерировать нисходящий сигнал. Эти Т нисходящих сигналов от модуляторов с 1332a по 1332t могут быть переданы через антенны с 1334a по 1334t, соответственно.
В аппаратуре 120 UE R антенн с 1352а по 1352r могут принимать эти Т нисходящих сигналов от Узла B 110, так что каждая антенна 1352 может передавать принятый сигнал соответствующему демодулятору (DEMOD) 1354. Каждый демодулятор 1354 может кондиционировать (например, фильтровать, усилить, преобразовать вниз по частоте и дискретизировать) свой принятый сигнал для получения отсчетов и может далее обрабатывать эти отсчеты (например, для OFDM) для получения принятых символов. Каждый демодулятор 1354 может передавать принятые символы данных и принятые символы в детектор 1360 MIMO и может передавать принятые опорные символы в канальный процессор 1394. Этот канальный процессор 1394 может оценить характеристику нисходящего канала от Узла B 110 к аппаратуре 120 UE на основе принятых опорных символов и передать эту характеристику нисходящего канала детектору 1360 MIMO. Этот детектор 1360 MIMO может выполнять детектирование MIMO для принятых символов данных и принятых символов управления на основе оценки характеристики нисходящего канала и генерировать детектированные символы. Процессор 1370 приема может обрабатывать (например, демодулировать и декодировать) детектированные символы, передавать декодированные данные потребителю 1372 данных и передавать декодированную управляющую информацию контроллеру/процессору 1390.
Аппаратура 120 UE может оценивать качество нисходящего канала и генерировать индикатор качества канала CQI и/или другую информацию обратной связи. Эта информация обратной связи, данные от источника 1378 данных и один или несколько опорных сигналов (например, зондирующие опорные сигналы) могут быть обработаны (например, кодированы и модулированы) процессором 1380 передачи, предкодированы процессором 1382 MIMO и далее обработаны в модуляторах с 1354a по 1354r для генерации R восходящих сигналов, которые могут быть переданы через антенны с 1352a по 1352r. В Узле B 110 эти R восходящих сигналов от аппаратуры 120 UE могут быть приняты антеннами с 1334a по 1334t и обработаны демодуляторами с 1332a по 1332t. Канальный процессор 1344 может оценить характеристику восходящего канала от аппаратуры 120 UE к Узлу B 110 и может передать оценку восходящего канала детектору 1336 MIMO. Этот детектор 1336 MIMO может выполнить детектирование MIMO на основе оценки характеристики восходящего канала и генерировать детектированные символы. Процессор 1338 приема может обрабатывать детектированные символы, передавать декодированные данные потребителю 1339 данных и передавать декодированную информацию обратной связи контроллеру/процессору 1340. Этот контроллер/процессор 1340 может управлять передачей данных аппаратуре 120 UE на основе информации обратной связи.
Контроллеры/процессоры 1340 и 1390 могут управлять работой Узла B 110 и аппаратуры 120 UE соответственно. Контроллер/процессор 1340 в Узле B 110 может выполнять или управлять выполнением процесса 600 согласно фиг.6, процесса 700 согласно фиг.7, процесса 900 согласно фиг.9 и/или других процессов, реализующих описываемые здесь способы. Контроллер/процессор 1390 в аппаратуре 120 UE может выполнять или управлять выполнением процесса 1100 согласно фиг.11 и/или других процессов, реализующих описываемые здесь способы. Запоминающие устройства 1342 и 1392 могут сохранять данные и коды программ для Узла B 110 и аппаратуры UE соответственно. Планировщик 1346 может выбрать станцию аппаратуры 120 UE и/или другие станции UE для передачи данных в нисходящем и/или восходящем направлении на основе информации обратной связи, принимаемой от аппаратуры UE. Планировщик 1346 может также выделять ресурсы планируемым станциям аппаратуры UE.
Специалисты в данной области должны понимать, что информация и сигналы могут быть представлены с использованием любой из многообразия различных технологий и способов. Например, данные, инструкции, команды, информация, сигналы, биты, символы и посылки, которые могут упоминаться в пределах всего приведенного выше описания, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами, либо любыми сочетаниями перечисленных факторов.
Специалисты в данной области должны также признавать, что разнообразные иллюстративные логические блоки, модули, схемы и этапы алгоритмов, рассмотренные в связи с приведенным выше описанием, могут быть реализованы в виде электронной аппаратуры, компьютерного программного обеспечения или сочетания таких аппаратуры и программного обеспечения. Для большей четкости иллюстрации такой взаимозаменяемости оборудования и программного обеспечения различные иллюстративные компоненты, блоки, модули, схемы и этапы были рассмотрены выше в общем виде с точки зрения их функциональных возможностей. Будут ли эти функциональные возможности реализованы аппаратно или программно, зависит от конкретного приложения и проектных ограничений, накладываемых на всю систему. Квалифицированные разработчики могут реализовать описанные функции различными способами для каждого конкретного приложения, но такие проектные решения не следует интерпретировать как вызывающие отклонения от сферы действия настоящего изобретения.
Различные иллюстративные логические блоки, модули и схемы, рассмотренные здесь в связи с настоящим изобретением, могут быть реализованы или выполнены с использованием процессора общего назначения, цифрового процессора сигнала (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретного вентиля или транзисторной логической схемы, дискретных компонентов аппаратуры или любых их сочетаний, рассчитанных на выполнение описываемых здесь функций. Процессор общего назначения может представлять собой микропроцессор, но в альтернативных вариантах такой процессор может представлять собой обычный процессор, контроллер, микроконтроллер или конечный автомат. Процессор может быть также реализован в виде сочетания вычислительных устройств, например сочетания цифрового процессора (DSP) и микропроцессора, нескольких микропроцессоров, одного или нескольких микропроцессоров в сочетании с ядром цифрового процессора (DSP) или какой-либо другой подобной конфигурации.
Этапы способа или алгоритма, описываемые в связи с настоящим изобретением, могут быть реализованы непосредственно в аппаратуре, в программном модуле, выполняемом процессором, или в виде их сочетания. Программный модуль может располагаться в запоминающем устройстве с произвольной выборкой (ЗУПВ (RAM)), флэш-памяти, ПЗУ (ROM), стираемом ППЗУ (СППЗУ (EPROM)), электрически программируемом стираемом ППЗУ (ЭСППЗУ (EEPROM)), регистрах, накопителе на жестком диске, дискетах, CD-ROM или любом другом подходящем запоминающем устройстве, известном в технике. Пример такого носителя записи соединен с процессором, так что процессор может считывать информацию с и записывать информацию на этом носителе. Процессор и носитель записи могут быть реализованы в одной специализированной интегральной схеме (ASIC). Такая ASIC может находиться в терминале пользователя. В альтернативном варианте процессор и носитель записи могут располагаться в дискретных компонентах в терминале пользователя.
В одном или нескольких примерах описываемые здесь функции могут быть реализованы аппаратно, в виде изменяемых программ, в виде встроенных программ или в виде сочетания аппаратных и программных средств. В варианте изменяемых программ эти функции могут быть записаны или переданы в виде одной или нескольких инструкций или программ на машиночитаемом носителе. Машиночитаемый носитель включает компьютерный носитель записи и среду связи, включающую любую среду, позволяющую передать компьютерную программу из одного места в другое. В качестве носителя записи может быть использован любой доступный носитель записи, к которому может обратиться и получить доступ компьютер общего или специального назначения. В качестве примера, но не ограничиваясь этим, такой машиночитаемый носитель может содержать RAM, ROM, EEPROM, CD-ROM или другой накопитель на оптических дисках, накопитель на магнитных дисках или другое магнитное запоминающее устройство, либо любой другой носитель, который может быть использован для передачи или сохранения нужной программы в форме инструкций или структур данных и к которому может обратиться и получить доступ компьютер общего или специального назначения, либо процессор общего или специального назначения. Кроме того, любое соединение также может называться машиночитаемым носителем. Например, если программное обеспечение передают с веб-сайта, сервера или другого удаленного источника с использованием коаксиального кабеля, волоконно-оптического кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводной технологии, такой как инфракрасное излучение, радиоволны или СВЧ-излучение, тогда эти коаксиальный кабель, волоконно-оптический кабель, витая пара, DSL или беспроводная технология, такая как инфракрасное излучение, радиоволны или СВЧ-излучение, включены в определение носителя. Применяемое здесь понятие дисков включает компакт-диски (CD), лазерные диски, оптические диски, цифровые универсальные диски (DVD), магнитные дискеты и диски Блю-рей, причем в английском написании disks, обычно воспроизводят данные магнитным способом, a discs воспроизводят данные оптическим способом с применением лазеров. Сочетания перечисленных выше видов памяти и носителей записи также должны быть включены в понятие машиночитаемого носителя.
Предшествующее описание изобретения рассчитано на то, чтобы любой специалист в данной области мог реализовать или использовать это изобретение. Различные модификации рассматриваемого изобретения могут быть легко понятны и очевидны специалисту, а общие принципы, установленные здесь, могут быть применены к другим вариантам, не отклоняясь от духа или объема изобретения. Таким образом, изобретение не должно ограничиваться только рассмотренными здесь примерами и структурами, но должно соответствовать самому широкому объему, согласованному с принципами и новыми признаками, описываемыми здесь.
Обнаружение многолучевого распространения для принимаемого sps-сигнала
Способ для указания местоположения и направления элемента графического пользовательского интерфейса
Виртуальное планирование в неоднородных сетях
Кодирование и мультиплексирование управляющей информации в системе беспроводной связи
Система беспроводной связи с конфигурируемой длиной циклического префикса
Способ и устройство для осуществления информационного запроса сеанса для определения местоположения плоскости пользователя
Универсальная корректировка блочности изображения
Основанная на местоположении и времени фильтрация информации широковещания
Способ и устройство для поддержки экстренных вызовов (ecall)
Виртуальная sim-карта для мобильных телефонов
Обнаружение многолучевого распространения для принимаемого sps-сигнала
Способ для указания местоположения и направления элемента графического пользовательского интерфейса
Виртуальное планирование в неоднородных сетях
Кодирование и мультиплексирование управляющей информации в системе беспроводной связи
Система беспроводной связи с конфигурируемой длиной циклического префикса
Способ и устройство для осуществления информационного запроса сеанса для определения местоположения плоскости пользователя
Универсальная корректировка блочности изображения
Основанная на местоположении и времени фильтрация информации широковещания
Способ и устройство для поддержки экстренных вызовов (ecall)
Виртуальная sim-карта для мобильных телефонов

