Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ПЕРЕМЕННОЙ СТРУКТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к бортовым цифроаналоговым устройствам для систем автоматического управления существенно нестационарными беспилотными летательными аппаратами (ЛА).
Известен способ автоматического управления ЛА, заключающийся в том, что задают сигнал воздействия, измеряют сигналы угла и угловой скорости, формируют сигнал рассогласования сигналами задающего воздействия и угла, формируют сигнал управления на рулевые приводы ЛА [1].
Известно устройство для систем автоматического управления ЛА, в которых содержится блок задающего воздействия, блок сравнения, суммирующий усилитель, датчики состояния и рулевые приводы [1].
Недостатком известных способа и устройства управления является ограниченность функциональных возможностей в условиях значительной нестационарности параметров ЛА, вызванных изменениями скорости и высоты полета ЛА, а также при технических ограничениях передаточных коэффициентов по максимальным значениям, что особенно важно для управления по тангажу при интенсивных вертикальных маневрах ЛА.
Наиболее близким к предлагаемому решению является способ формирования сигнала управления ЛА, заключающийся в том, что задают опорный сигнал функции адаптаци, измеряют текущий сигнал скоростного напора, формируют сигнал деления опорного сигнала функции адаптации на сигнал скоростного напора, задают сигнал опорного значения скоростного напора, сравнивают измеренный сигнал скоростного напора с сигналом опорного значения скоростного напора, формируют предварительный сигнал управления умножением входного сигнала на параметрический сигнал и выходной сигнал управления формируют усилением предварительного сигнала управления [2].
Наиболее близким устройством, реализующим предложенный способ, является устройство формирования сигнала управления ЛА, содержащее последовательно соединенные первый задатчик опорного сигнала и блок деления, датчик скоростного напора, выход которого соединен со вторым входом блока деления, последовательно соединенные блок умножения, вход которого является входом устройства, и усилитель, выход которого является выходом устройства [2].
Недостатками известных способа и устройства являются ограниченные функциональные возможности в условиях существенного изменения условий полета по скорости и высоте, а также при аппаратурных ограничениях передаточных коэффициентов по максимальному значению в цифроаналоговых элементах.
Решаемой в предложенных способе и устройстве технической задачей является повышение точностных характеристик управления, расширение функциональных возможностей и оптимальное построение по реализации больших значений передаточных чисел. Предложенным построением обеспечивается адаптация параметров стабилизации и логическое изменение параметров структуры управления, что обеспечивает повышение устойчивости и качества процессов в целом в условиях широкого диапазона параметров ЛА.
Указанный технический результат достигается тем, что в известном способе формирования сигнала управления с переменной структурой для адаптивных систем управления ЛА, заключающемся в том, что задают опорный сигнал функции адаптации А, измеряют текущий сигнал скоростного напора q, формируют сигнал деления опорного сигнала функции адаптации А на сигнал скоростного напора q, задают сигнал опорного значения скоростного напора q0, сравнивают измеренный сигнал скоростного напора q с сигналом опорного значения скоростного напора q0, формируют предварительный сигнал управления умножением входного сигнала на параметрический сигнал, выходной сигнал управления формируют усилением предварительного сигнала управления, дополнительно формируют при q<q0 параметрический сигнал усилением сигнала деления на значение α1·α2, где  ,
,  , Kmax - максимальное расчетное значение сигнала деления опорного сигнала функции адаптации А на сигнал скоростного напора q, K1max - максимальное значение технически реализуемого коэффициента параметрического сигнала, K3max - требуемое максимальное значение коэффициента параметрического сигнала.
, Kmax - максимальное расчетное значение сигнала деления опорного сигнала функции адаптации А на сигнал скоростного напора q, K1max - максимальное значение технически реализуемого коэффициента параметрического сигнала, K3max - требуемое максимальное значение коэффициента параметрического сигнала.
Указанный технический результат достигается и тем, что в известное цифроаналоговое устройство для адаптивных систем управления ЛА, содержащее последовательно соединенные задатчик опорного сигнала и блок деления, датчик скоростного напора, выход которого соединен со вторым входом блока деления, последовательно соединенные блок умножения, вход которого является входом устройства, и усилитель, выход которого является выходом устройства, дополнительно введены последовательно соединенные второй задатчик опорного сигнала, блок сравнения, второй вход которого соединен с выходом датчика скоростного напора, управляемый переключатель, вход которого соединен с выходом блока деления, первый масштабный усилитель, сумматор и цифроаналоговый преобразователь, выход которого соединен со вторым входом блока умножения, и второй масштабный усилитель, вход которого соединен со вторым выходом управляемого переключателя, а выход - со вторым входом сумматора.
Действительно, при этом обеспечивается отработка сигналов управления с максимальным качеством в широком диапазоне изменения высоты и скорости полета ЛА и с учетом широкого диапазона передаточных коэффициентов управляющего канала.
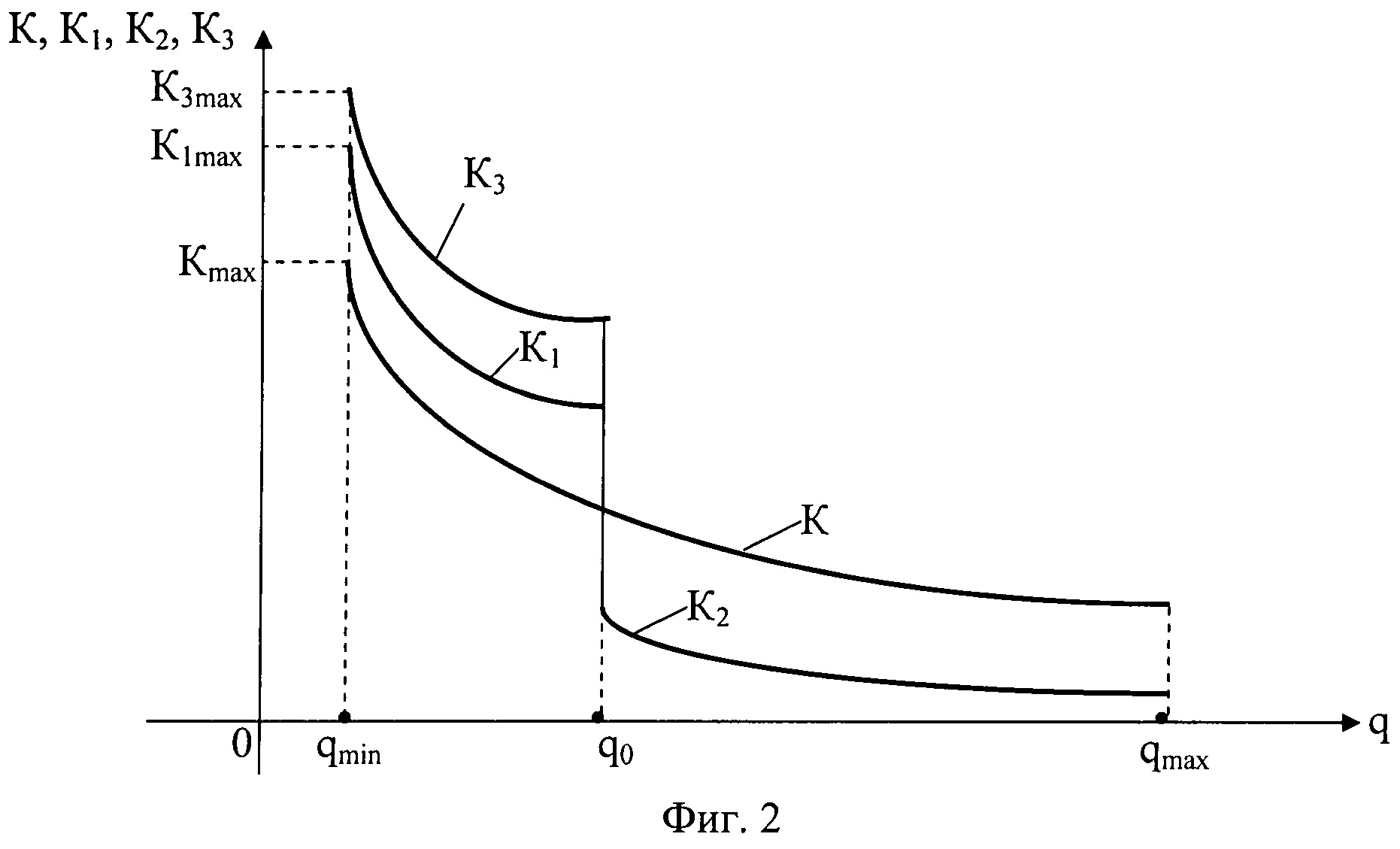
На фиг.1 представлена блок-схема цифроаналогового устройства управления с переменной структурой для адаптивных систем управления ЛА; на фиг.2 - зависимости коэффициентов К, К1, К2 и К3 в функции от скоростного напора q.
Цифроаналоговое устройство управления с переменной структурой для адаптивных систем управления ЛА (фиг.1) содержит последовательно соединенные первый задатчик опорного сигнала 1 (1 З0С) и блок деления 2 (БД), датчик скоростного напора 3 (ДСН), выход которого соединен со вторым входом блока деления 2, последовательно соединенные блок умножения 4 (БУ), вход которого является входом устройства, и усилитель 5 (У), выход которого является выходом устройства, последовательно соединенные второй задатчик опорного сигнала 6 (2 З0С), блок сравнения 7 (БС), второй вход которого соединен с выходом датчика скоростного напора 3, управляемый переключатель 8 (УП), вход которого соединен с выходом блока деления 2, первый масштабный усилитель 9 (1 МУ), сумматор 10 (С) и цифроаналоговый преобразователь 11 (ЦАП), выход которого соединен со вторым входом блока умножения 4, и второй масштабный усилитель 12 (2 МУ), вход которого соединен со вторым выходом управляемого переключателя 8, а выход - со вторым входом сумматора 10.
Устройство формирования цифроаналогового адаптивного сигнала управления летательным аппаратом с переменной структурой, реализующее предложенный способ, работает следующим образом.
Рассмотрим формирование сигнала рассогласования по тангажу Δϑ ЛА (для канала управления по угловой скорости по тангажу  и для других каналов ЛА формирование сигнала рассогласования осуществляется аналогично).
и для других каналов ЛА формирование сигнала рассогласования осуществляется аналогично).
Наиболее обобщенной характеристикой, идентифицирующей нестационарность параметров ЛА в полете, является сигнал скоростного напора q. Базовая функция адаптации перестраивает передаточный коэффициент К канала управления ЛА и формируется по гиперболической зависимости для дипазона от qmin до qmax в виде
где A=const - опорный сигнал функции адаптации.
Входной сигнал канала управления по рассогласованию Δϑ поступает на первый вход блока умножения 4 и далее через усилитель 5 на выход устройства. На второй вход блока 4 поступает сигнал параметрического воздействия для адаптивной перестройки передаточного числа.
Блоками 1, 2 и 3 формируется базовый закон адаптации передаточного коэффициента К в соответствии с (1) (фиг.2).
Реализация необходимого передаточного коэффициента, состоящего из кривых К3 и К2, К3>К2, определена избирательно: при q≤q0 передаточный коэффициент максимален. Управляемый переключатель 8 замкнут выходом на первый масштабный усилитель 9 с коэффициентом усиления α1. На второй вход блока умножения 4 поступает сигнал К·α1 через блоки 10, 11. Коэффициент К·α1 рассчитан умножением базового коэффициента К на коэффициент α1 блока умножения 4 с целью достижения максимального технически реализуемого значения блока умножения K1max при q=qmax:

где α1>1,
Недостающее усиление, ограниченное значением K1max блока умножения 4 и равное
восполняется усилителем 5, т.е. его коэффициент усиления равен

При q>q0, т.е. q=q0÷qmax, управляемый переключатель 9 переключается на цепь второго масштабного усилителя 12 с коэффициентом β для блока умножения 4 через блоки 10 и 11, т.е.

Коэффициент β определяет, соответственно, требуемую степень уменьшения коэффициента К
Таким образом, выходной сигнал σ формируется в виде

при q≤q0
и 
при q>q0.
K1max соответствует максимально реализуемому значению коэффициента усиления блока умножения 4, K3max определяет требуемое значение коэффициента при q=qmin.
Режим переключения управляемого переключателя 8 осуществляется сигналом сравнения в блоке сравнения 7 сигналов текущего значения скоростного напора q от датчика 3 и расчетного значения q0, выставленного во втором задатчике опорного сигнала 6.
Сигнал на выходе блока сравнения 7 составляет

и определяет логическое управление переключателем 8 для сигнала σ согласно уравнениям (8) и (9).
Устройство несложно реализуется на элементах автоматики и вычислительной техники, например, по [3, 4] и алгоритмически.
Предложенные цифроаналоговое устройство управления с переменной структурой для адаптивных систем управления ЛА и способ его реализации позволяют повысить точность управления в условиях широкого диапазона условий полета ЛА.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов./ Под ред. Г.С. Бюшгенса. М.: Наука. Физматлит, 1998, с.443.
2. Патент РФ №2338236, 10.11.2008 г., кл. G05D 1/08.
3. В.Б. Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с.22, 41.
4. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М., Машиностроение, 1981, с.107, 126.

Способ управления положением солнечной батареи космического аппарата при частичных отказах датчика угла
Способ коррекции времени включения маршевого двигателя разгонного блока на участке доразгона
Способ формирования сигнала управления рулевым приводом беспилотного летательного аппарата и устройство для его осуществления
Клиновой зажим
Способ удаления оболочек семян из шрота/жмыха подсолнечника и установка для его осуществления
Способ формирования цифроаналогового адаптивного сигнала управления для бортовых систем управления угловым движением беспилотных летательных аппаратов и устройство для его осуществления
Способ защиты от сбоев и отказов электронного блока космического аппарата, вызываемых внешними воздействующими факторами, и устройство для его осуществления
Широкопольный датчик положения солнца
Способ формирования сигналов управления для рулевых приводов беспилотного летательного аппарата и устройство для его осуществления
Электромагнитный двигатель для поворота на заданный угол
Адаптивное устройство координированного управления летательным аппаратом
Устройство координированного управления летательным аппаратом
Способ управления движением разгонного блока на участке доразгона
Способ формирования интегрального сигнала стабилизации планирующего движения беспилотного летательного аппарата и устройство для его осуществления
Способ управления продольным движением разгонного блока на участке доразгона
Бортовая цифроаналоговая система управления летательным аппаратом
Способ управления движением разгонного блока в конце маневра
Способ коррекции параметров программы ориентации разгонного блока
Способ формирования отказоустойчивой вычислительной системы и отказоустойчивая вычислительная система
Способ формирования 4-канальной отказоустойчивой системы бортового комплекса управления повышенной живучести и эффективного энергопотребления и его реализация для космических применений

