Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КРИТИЧЕСКОГО СНИЖЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА В РАБОЧЕЙ МАШИНЕ
Вид РИД
Изобретение
Область изобретения
Настоящее изобретение относится к рабочей машине и, более конкретно, к способу определения критического снижения скорости вращения вала в рабочей машине.
Предпосылки к созданию изобретения
Одним типом рабочей машины является сельскохозяйственный комбайн. Сельскохозяйственные комбайны представляют собой машины с силовым приводом двигателя, которые убирают, обмолачивают, сепарируют и очищают урожай сельскохозяйственных культур. Полученное чистое зерно хранится в бункере для зерна, расположенном на комбайне. Затем чистое зерно можно транспортировать из бункера для зерна в грузовик, зерновоз или другой приемный бункер с помощью выгружающего шнека.
Сельскохозяйственные комбайны имеют несколько вращающихся валов (напр., ротор, элеватор чистого зерна и пр.), которые контролируются для изменения скорости. Обычно, имеется большая таблица, в которой указаны допустимые диапазоны скорости вращения для каждого вала, на основе типа машины и других пользовательских установках. Когда скорость вращения вала падает ниже величины, определенной в этой таблице, активируется устройство тревоги, уведомляющее оператора о низкой скорости вращения вала.
Однако, при таком подходе, при каждом изменении в установках и опциях машины, таблицу становится все труднее выдерживать. Кроме того, оператор может испытывать ложную тревогу, когда на самом деле все в порядке.
Краткое описание изобретения
Настоящее изобретение в одной из его форм относится к способу определения критического снижения скорости вращения вала в рабочей машине, имеющей, по меньшей мере, один контролируемый вал, приводимый во вращение коленчатым валом двигателя машины. Способ включает в себя определение фактической скорости вращения коленчатого вала; определение фактической скорости вращения первого контролируемого вала; определение отфильтрованной скорости вращения первого контролируемого вала на основе алгоритма, в котором используется фактическая скорость вращения первого контролируемого вала, фактическая скорость вращения коленчатого вала, и опорная скорость вращения коленчатого вала; сравнение отфильтрованной скорости вращения первого контролируемого вала с фактической скоростью вращения первого контролируемого вала; определение, имеется ли отклонение фактической скорости вращения первого контролируемого вала от отфильтрованной скорости вращения первого контролируемого вала на заданную величину; и активацию устройства тревоги, если фактическая скорость вращения первого контролируемого вала отклоняется от отфильтрованной скорости вращения первого контролируемого вала на заданную величину.
В другой своей форме настоящее изобретение относится к способу определения критического снижения скорости вращения вала в рабочей машине, имеющей, по меньшей мере, один контролируемый вал, приводимый во вращение коленчатым валом двигателя. Способ включает в себя определение фактической скорости вращения коленчатого вала; определение фактической скорости вращения первого контролируемого вала; определение смещенной скорости вращения первого контролируемого вала на основе, по меньшей мере, фактической скорости вращения первого контролируемого вала, фактической скорости вращения коленчатого вала и опорной скорости вращения коленчатого вала; определение отфильтрованной скорости вращения первого контролируемого вала, посредством пропускания смещенной скорости вращения первого контролируемого вала через фильтр нижних частот; сравнение отфильтрованной скорости вращения первого контролируемого вала с фактической скоростью вращения первого контролируемого вала; определение, имеется ли отклонение фактической скорости вращения первого контролируемого вала от отфильтрованной скорости вращения первого контролируемого вала на заданную величину; и активацию устройства тревоги, если фактическая скорость вращения первого контролируемого вала отклоняется от отфильтрованной скорости вращения первого контролируемого вала на заданную величину.
В своей другой форме настоящее изобретение относится к рабочей машине. Рабочая машина включает в себя, имеющий коленчатый вал. Рабочий агрегат выполнен с возможностью выполнения рабочей функции. Рабочий агрегат имеет, по меньшей мере, один контролируемый вал, соединенный с возможностью приведения во вращение с коленчатым валом двигателя. Система текущего контроля вала содержит устройство контроля и множество датчиков, контактно подключенных к устройству контроля. Множество датчиков контролируют скорость вращения коленчатого вала и, по меньшей мере, одного контролируемого вала. Устройство контроля включает в себя контроллер и устройство тревоги. Устройство контроля выполняет команды программы для идентификации критического снижения скорости вращения каждого контролируемого вала. Команды программы выполняют действия определения фактической скорости вращения коленчатого вала; определения фактической скорости вращения первого контролируемого вала; определения отфильтрованной скорости вращения первого контролируемого вала на основе алгоритма, в котором используется фактическая скорость вращения первого контролируемого вала, фактическая скорость вращения коленчатого вала и опорная скорость вращения коленчатого вала; сравнения отфильтрованной скорости вращения первого контролируемого вала с фактической скоростью вращения первого контролируемого вала; определения, имеется ли отклонение фактической скорости вращения первого контролируемого вала от отфильтрованной скорости вращения первого контролируемого вала на заданную величину; и активации устройства тревоги, если фактическая скорость вращения первого контролируемого вала отклоняется от отфильтрованной скорости вращения первого контролируемого вала на заданную величину.
Краткое описание чертежей
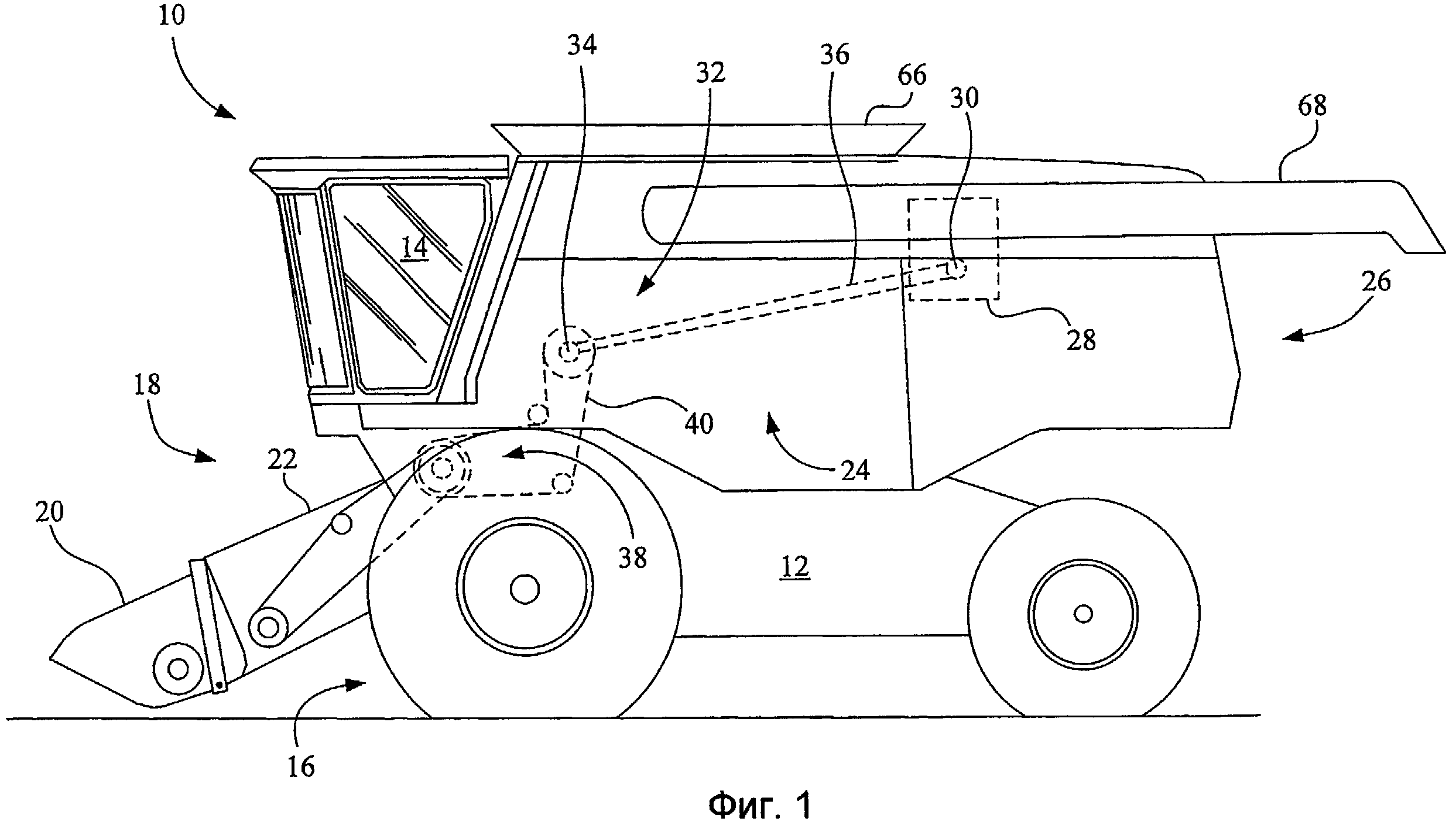
Фиг.1 - схематический вид слева рабочей машины в форме сельскохозяйственного комбайна, воплощающего настоящее изобретение.
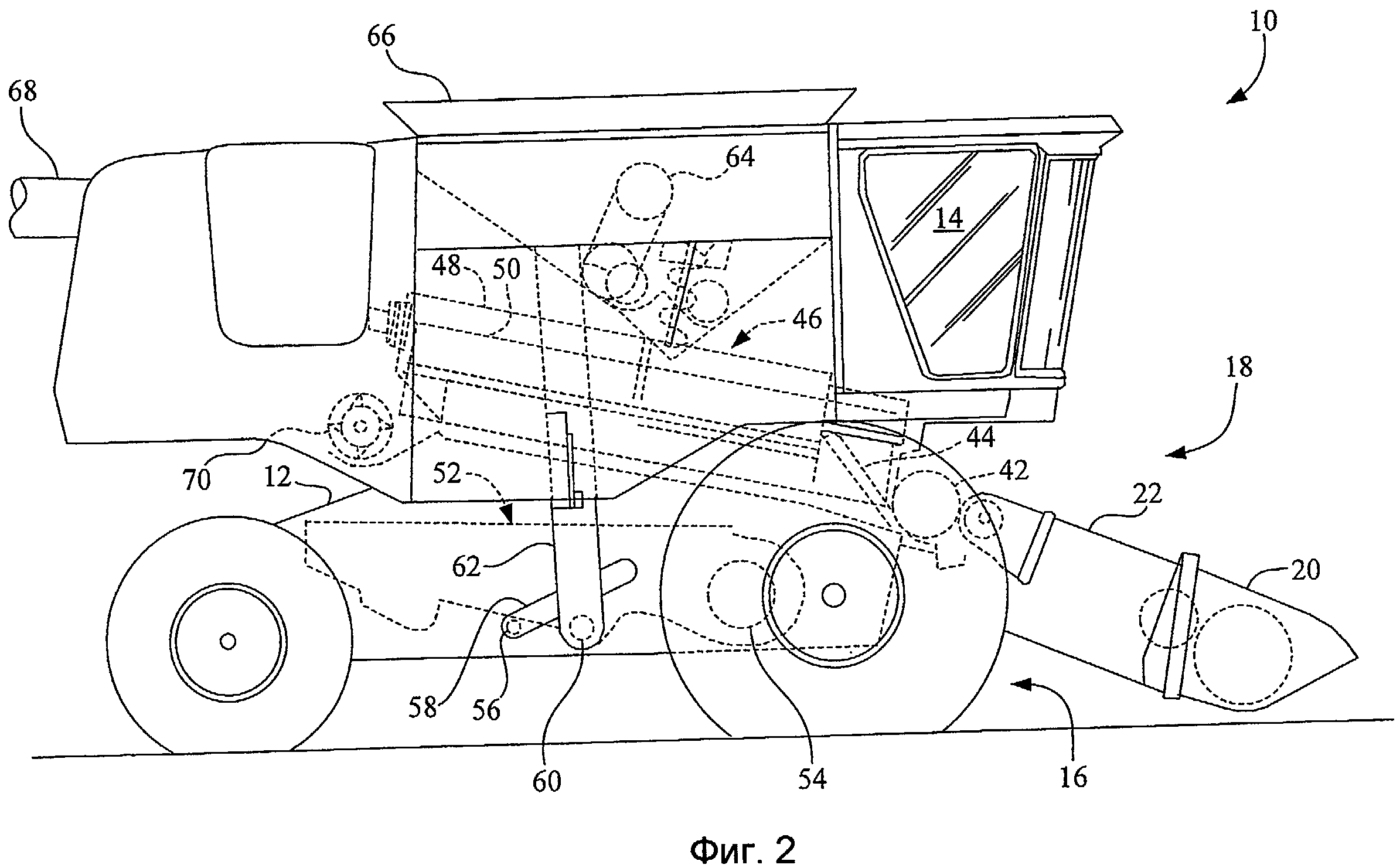
Фиг.2 - схематический вид справа сельскохозяйственного комбайна по фиг.1.
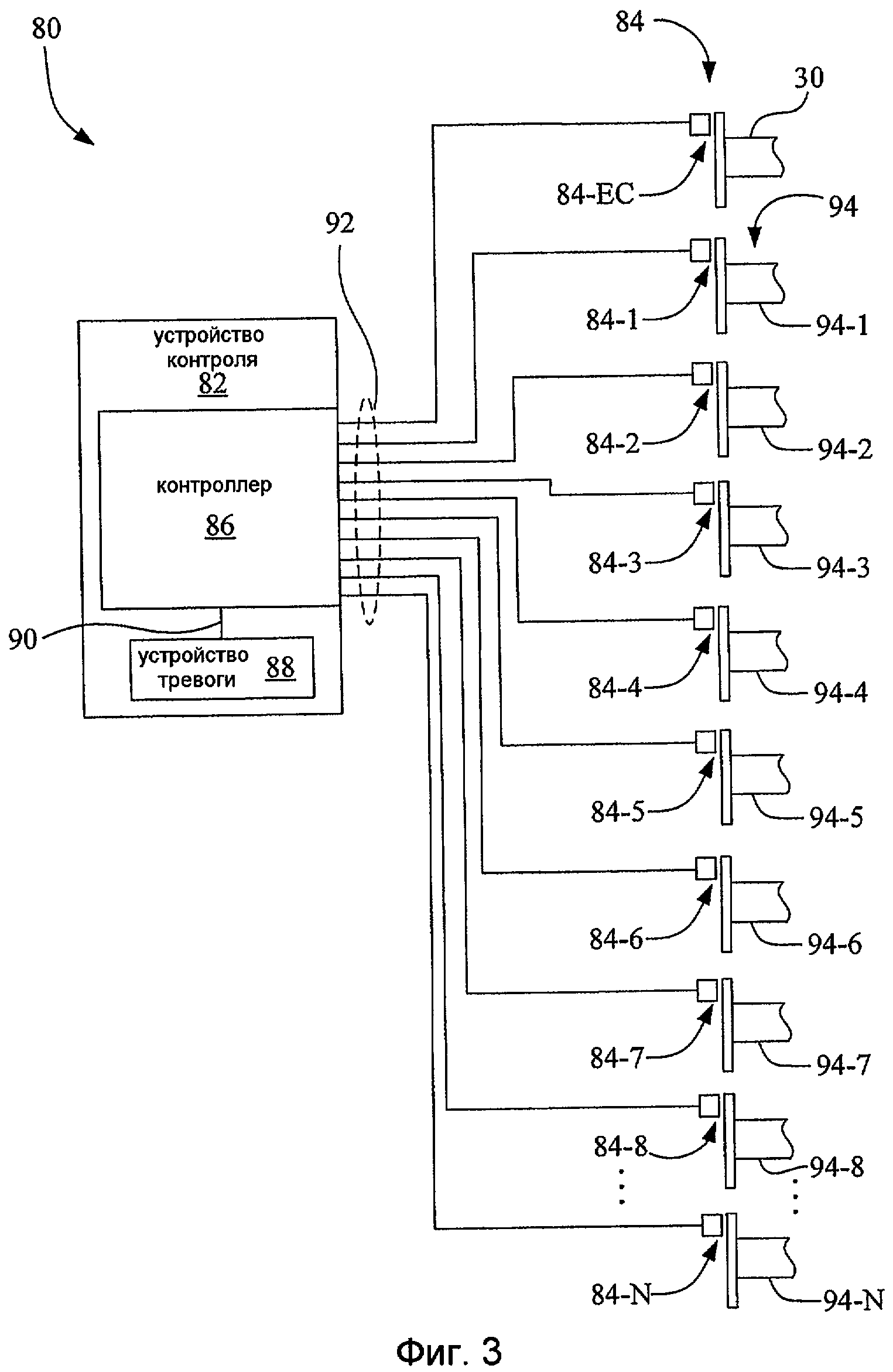
Фиг.3 - блок-схема, изображающая систему текущего контроля вала, сконфигурированную в соответствии с вариантом настоящего изобретения.
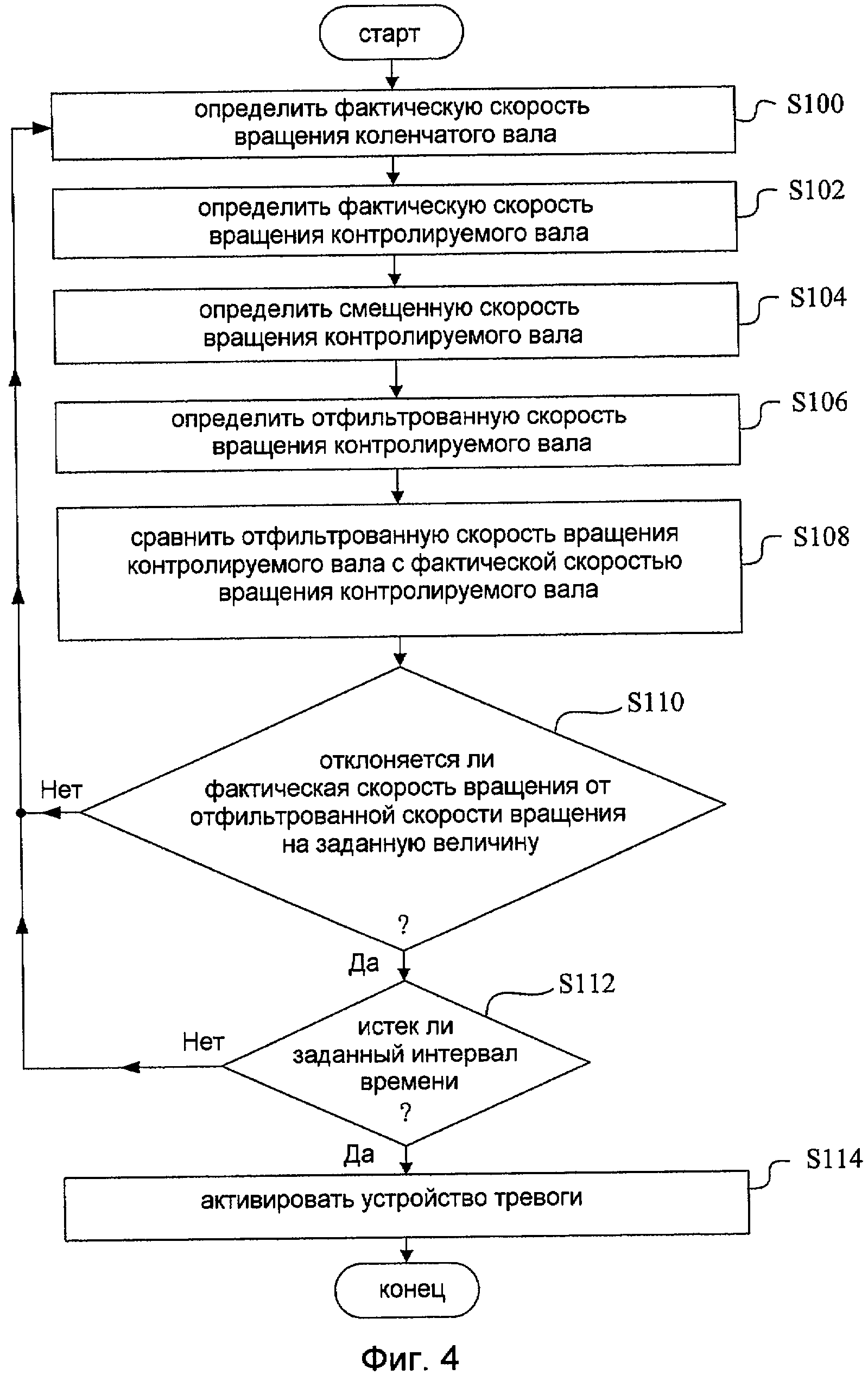
Фиг.4 - структурная схема способа определения критического снижения скорости вращения контролируемого вала в рабочей машине, используемая в системе текущего контроля по фиг.3.
Подробное описание изобретения
На чертежах, и в частности на фиг.1, показана рабочая машина 10 в форме самодвижущегося сельскохозяйственного комбайна. Хотя настоящее изобретение описывается в применении к комбайну, предусматривается, что настоящее изобретение может быть использовано на рабочих машинах других типов, имеющих один или более контролируемый вращающийся вал.
Рабочая машина 10 в форме сельскохозяйственного комбайна включает в себя поддерживающую структуру 12. На передней части рабочей машины 10 установлена приподнятая кабина 14 оператора. Блок 16 движения может включать в себя шины и/или гусеницы, которые зацепляются с грунтом, соединенные с поддерживающей структурой 12 и выполняющие функции движения и/или управления направлением движения.
С поддерживающей структурой 12 соединен рабочий агрегат 18, выполненный с возможностью выполнения рабочей функции. В настоящем варианте рабочей машины 10, сконфигурированной как сельскохозяйственный комбайн, рабочий агрегат 18 может включать в себя уборочную платформу 20, приемную камеру 22 молотилки, блок 24 главного сепаратора и блок 26 обработки остатков урожая. Уборочная платформа 20, например, насадка для кукурузы или насадка для бобовых, и т.п., используется для уборки урожая и направления урожая в приемную камеру 22 молотилки. Приемная камера 22 молотилки направляет собранный урожай на блок 24 главного сепаратора, который выполняет операции обмолота, сепарирования и очистки. Затем остатки урожая направляются в блок 26 обработки остатков урожая, который в свою очередь может дополнительно измельчать и разбрасывать остатки урожая по полю.
Установленный поперечно двигатель 28 внутреннего сгорания обеспечивает механическую энергию, необходимую для выполнения движения и операций уборки, молотьбы, сепарирования, очистки и переработки остатков урожая. Двигатель 28 включает в себя коленчатый вал 30, соединенный с системой 32 привода ременного типа. Система 32 привода ременного типа включает в себя первичный промежуточный вал 34, соединенный с коленчатым валом 30 двигателя 28 через вал и конфигурацию 36 коробки передач, которые показаны схематически. С первичным промежуточным валом 34 через приводной ремень 40 соединен агрегат 38 переменной скорости, который в свою очередь соединен с различными вращающимися валами с одной или более уборочной платформой 20, приемной камерой 22 молотилки, блоком 24 главного сепаратора и блоком 26 обработки остатков урожая.
Как показано на фиг.2, уборочная платформа 20 облегчает уборку урожая и направляет урожай в приемную камеру 22 молотилки. Убираемый урожай направляют посредством приемной камеры 22 молотилки на блок 24 главного сепаратора. Блок 24 главного сепаратора включает в себя ускоритель 42 подачи, который направляет убираемый урожай вверх через входную переходную секцию 44 на осевой блок 46 переработки урожая.
Осевой блок 46 переработки урожая расположен между и может быть поддержан бортами рабочей машины 10 и поддерживающей структурой 12. Осевой блок 46 переработки урожая включает в себя корпус 48 осевого ротора и осевой ротор 50, расположенный в корпусе 48 осевого ротора. Убираемый урожай входит в корпус 48 осевого ротора через входную переходную секцию 44. Осевой ротор 50 обеспечен входным участком, молотильным участком и отделяющим участком. Корпус 48 осевого ротора имеет соответствующие входную секцию, молотильную секцию и отделяющую секцию.
Оба участка переработки урожая, молотильный участок и сепарирующий участок снабжены агрегатами, увлекающими за собой урожай. Молотильная секция корпуса 48 осевого ротора снабжена углублением, а отделяющая секция - решеткой. Зерно и мякина, высвобожденные из урожая, проходят сквозь решетку и углубление. Решетка и углубление препятствуют прохождению материала урожая, по размеру превышающего зерна или мякину, в систему 52 очистки, которая включает в себя очищающий вентилятор 54.
Зерно и мякина, проходящие сквозь углубление и решетку направляются в систему 52 очистки, которая отделяет зерно от мякины. Шнек 56 для отходов направляет обратно остатки, собранные на дне системы 52 очистки на подъемник 58 для повторной обработки в системе 52 очистки. Очищенное зерно направляется шнеком 60 очищенного зерна на подъемник 62 очищенного зерна и, далее на разбрасывающий шнек 64. Разбрасывающий шнек 64 направляет зерно в бункер для зерна или зернохранилище 66. Зерно удаляется из бункера для зерна выгружающим шнеком 68.
По мере того как остатки урожая, т.е., солома, стебли, мякина, пыль и пр., достигают конца блока 24 главного сепаратора, они выбрасываются через выходное отверстие в блок 26 переработки остатков урожая. Блок 26 переработки остатков урожая включает в себя, например, битер 70, который проталкивает остатки урожая через заднюю часть комбайна. Блок 26 переработки остатков урожая дополнительно может включать в себя, например, измельчитель соломы (не показан).
На фиг.3 показана блок-схема системы 80 текущего контроля вала, выполненная в соответствии с воплощением настоящего изобретения. Система 80 текущего контроля вала имеет устройство 82 контроля и множество датчиков 84. Устройство 82 контроля может быть установлено в кабине 14 оператора и включает в себя контроллер 86, контактно связанный с устройством 88 тревоги по проводной связи 90. Множество датчиков 84 контактно связанны с контроллером 86 устройства 82 контроля по каналу связи 92, например, по многожильному кабелю.
Контроллер 86 может состоять только из аппаратного средства, или из аппаратного средства, в котором используется программно-аппаратные/программные средства, которые выполняют заданную операцию текущего контроля вала. Например, контроллер 86 может состоять из микропроцессора и связанной с ним памяти с хранящимися в ней командами на выполнение операции текущего контроля вала. Альтернативно, процедура текущего контроля вала может быть аппаратным решением с логикой, например, в форме специализированной интегральной схемы (ASIC).
Устройство 88 тревоги может предусматривать звуковой и/или визуальный сигнал тревоги, который воспринимается оператором рабочей машины 10. Например, звуковое обозначение тревоги может быть повторяющимся тоном или прерывистым звуком, а визуально обозначение тревоги может быть освещением светового индикатора или освещением участка схематического изображения контролируемых валов.
Для текущего контроля скорости вращения коленчатого вала 30 и скоростей вращения множества контролируемых валов 94, в настоящем варианте воплощения индивидуально обозначенных как контролируемые валы 94-1, 94-2, 94-3, 94-4, 94-5, 94-6, 94-7, 94-8 … 94-N, можно использовать множество датчиков 84, в настоящем варианте воплощения индивидуально обозначенных как датчики 84-ЕС, 84-1, 84-2, 84-3, 84-4, 84-5, 84-6, 84-7, 84-8 … 84-N, где N - представляет некоторое конечное количество контролируемых валов. Каждый из множества датчиков 84 может иметь известную в данной области техники конфигурацию датчика, например, являться средством индуктивного датчика, средством оптического датчика, средством датчика Холла и т.д. В настоящем иллюстративном варианте, где рабочей машиной 10 является сельскохозяйственный комбайн, контролируемые валы 94-1, 94-2, 94-3, 94-4, 94-5, 94-6, 94-7, 94-8 … 94-N могут быть валами, например, соответственно связанными с ускорителем 42 подачи, осевым ротором 50, очищающим вентилятором 54, подъемником 58 остатков, шнеком 60 очищенного зерна, подъемником 62 очищенного зерна, разгружающим битером 70 и измельчителем соломы (факультативно). Каждый из множества контролируемых валов 94 приводится во вращение прямо или косвенно коленчатым валом 30 двигателя 28 внутреннего сгорания. Специалистам в данной области понятно, что количество контролируемых валов можно увеличивать или уменьшать относительно показанного в настоящем иллюстративном варианте.
На фиг.4 приведена диаграмма последовательности способа определения критического снижения скорости вращения вала в рабочей машине, например в рабочей машине 10 по варианту воплощения настоящего изобретения. Способ может выполняться, например, как команды программы, исполняемые системой 80 текущего контроля вала по фиг.3.
На действии S100 определяют фактическую скорость вращения коленчатого вала двигателя. Фактическая скорость вращения коленчатого вала 30 двигателя 28 может определяться, например, датчиком 84-ЕС, генерирующим сигнал, соответствующий скорости вращения коленчатого вала 30 и этот сигнал, представляющий фактическую скорость вращения коленчатого вала 30, в свою очередь, подается на контроллер 86 устройства контроля 82. Например, если датчик 84-ЕС является сборкой индуктивного датчика, начальный сигнал может указывать на частоту вращения, которая переводится контроллером 86 в обороты в минуту (об/мин). Например, SpeedRPM = SpeedHZ × 60/PPR, где SpeedRPM - фактическая скорость вращения в об/мин, SpeedHZ - фактическая частота вращения в Гц, а PPR - количество выходных импульсов на оборот контролируемого вала.
На действии S102 определяют фактическую скорость вращения контролируемого вала. Например, контролируемым валом может быть один из множества контролируемых валов 94, который контролируется соответствующим одним из множества датчиков 84. Для целей настоящего примера, предположим, что интересуемым валом является контролируемый вал 94-2, связанный с осевым ротором 50 и который контролируется датчиком 84-2. В вариантах воплощения, где датчик 84-2 является сборкой индуктивного датчика, начальный сигнал может указывать на частоту вращения вала 94-2, которая переводится контроллером 86 в обороты в минуту.
На действии S104 определяют смещенную скорость вращения контролируемого вала, т.е., контролируемого вала 94-2, основываясь, по меньшей мере, на фактической скорости вращения контролируемого вала, т.е., контролируемого вала 94-2, фактической скорости вращения коленчатого вала 30 и опорной скорости вращения коленчатого вала 30. Опорная скорость вращения коленчатого вала является константой, имеющей величину, соответствующую номинальной максимальной скорости вращения коленчатого вала 30 двигателя 28. В одном варианте воплощения, например, опорная скорость вращения коленчатого вала 30 равна 2340 об/мин.
Действие определения смещенной скорости вращения контроллер 86 устройства контроля 82 может проводить расчет на основе логики, представленной уравнением:
BRSS = ARSSЧ(ARSC/RRSC)
где:
BRSS - смещенная скорость вращения контролируемого вала, т.е., контролируемого вала 94-2;
ARSS - фактическая скорость вращения контролируемого вала, т.е., в контролируемого вала 94-2;
ARSC - фактическая скорость вращения коленчатого вала 30; и
RRSC - опорная скорость вращения коленчатого вала 30.
На действии S106 определяют отфильтрованную скорость вращения контролируемого вала, т.е. контролируемого вала 94-2, пропуская смещенную скорость вращения контролируемого вала через фильтр нижних частот. Действие определения отфильтрованной скорости вращения контролируемого вала может осуществлять расчет с помощью контроллера 86 устройства контроля 82 на основе логики фильтрования, представленной уравнением:
FRSS = (FRSSpreЧ99 + BRSS)/100
где:
FRSS - текущая отфильтрованная скорость вращения контролируемого вала, т.е., контролируемого вала 94-2;
FRSSpre - предыдущая отфильтрованная скорость вращения контролируемого вала, т.е., контролируемого вала 94-2; и
BRSS - смещенная скорость вращения контролируемого вала, т.е., контролируемого вала 94-2.
Таким образом, если смещенная скорость вращения медленно изменяется во времени (например, из-за температуры гидравлики или регулирования оператора), то логика фильтрования предотвратит генерирование каких-либо сигналов тревоги. Однако, если смещенная скорость вращения контролируемого вала упадет внезапно, то система 80 текущего контроля может сгенерировать сигнал тревоги для уведомления оператора о низкой скорости вала, если удовлетворены все остальные условия генерирования сигнала тревоги.
На действии S108 отфильтрованную скорость вращения контролируемого вала сравнивают с фактической скоростью вращения контролируемого вала.
На действии S110 определяют, отклоняется ли фактическая скорость вращения контролируемого вала от отфильтрованной скорости вращения контролируемого вала на заданную величину. В одном варианте воплощения, например, заданной величиной выбирают 25%. Однако, специалистам в данной области понятно, что эта заданная величина может выбираться выше или ниже 25%, в зависимости от применения и требуемой чувствительности к изменениям.
Если фактическая скорость вращения контролируемого вала не отклоняется от отфильтрованной скорости вращения контролируемого вала на заданную величину (т.е., определение на действии S110 является НЕТ), то процесс возвращается на действие S100 и процесс повторяется.
Если фактическая скорость вращения контролируемого вала отклоняется от отфильтрованной скорости вращения контролируемого вала на заданную величину (т.е., определение на действии S110 является ДА), то процесс переходит к действию S112.
На действии S112 определяют, истекло ли заданное время. В одном варианте воплощения, например, заданное время составляет две секунды. Однако, специалистам в данной области понятно, что заданное время можно выбрать больше или меньше двух секунд, в зависимости от применения и требуемой чувствительности к изменениям.
Если заданное время не истекло (т.е., определение на действии S112 является НЕТ), то процесс возвращается на действие S110 и процесс повторяется.
Если заданное время истекло, (т.е., определение на действии S112 является ДА), процесс переходит к действию S114.
На действии S114, активируется устройство 88 тревоги, например контроллером 86 устройства 82 контроля, указывающим, что скорость вращения контролируемого вала, т.е., контролируемого вала 94-2, критически снижается.
Оператор рабочей машины 10 может затем принять корректирующее действие по устранению причины активации устройства тревоги. Устройство тревоги может возвратиться в исходное состояние, например, при каждом отсоединении приемной камеры 22 молотилки, когда система 80 текущего контроля вала будет вновь перенастраивать фактические скорости вращения вала и вновь вычислять соответствующую отфильтрованную скорость вращения каждого контролируемого вала, когда приемная камера 22 молотилки вновь подключается. Кроме того, при этом устраняются ложные сигналы тревоги при любых изменениях конфигурации (например, установка с низкой скорости на высокую).
Для облегчения понимания способ по фиг.4 был описан в отношении единственного контролируемого вала, т.е., контролируемого вала 94-2. Однако, при работе можно последовательно или одновременно контролировать каждый из контролируемых валов 94, применяя описанный выше способ.
Выше был описан предпочтительный вариант воплощения, очевидно, что в настоящее изобретение могут быть внесены различные изменения, не выходящие за пределы объема приложенной формулы.
Система натяжения шпагата для пресс-подборщика
Система охлаждения/нагревания транспортного средства с консолидированным нагревательным/охлаждающим сердечником
Управление приводом на передние колеса
Защитный узел для транспортных средств повышенной проходимости
Смещающий узел транспортера и тележка для продукции со смещающим узлом транспортера
Контур подачи дизельного топлива
Колесный балансировочный узел
Сельскохозяйственный пресс-подборщик с датчиками формы и способ
Узел подножки транспортного средства
Подающий барабан со смещающимися в осевом направлении пальцами
Орудие с уменьшенным обменом гидравлического масла
Система и способ управления температурой машины
Подъемный рычажный механизм фронтального погрузчика

