Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ ДЕФЕКТОВ В СТЕНКЕ ТРУБЫ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к способу и системе для обнаружения дефектов в стенке трубы, содержащим ультразвуковой преобразователь, приспособленный для излучения через выходное отверстие ультразвуковых сигналов из внутренней части трубы в направлении ее стенки и для приема через входное отверстие сигналов обратного рассеяния от ее стенки.
Уровень техники
Прототипы ультразвуковых систем, иногда называемые «внутритрубными дефектоскопами (инспекционными скребками)» («pigs»), содержат один ультразвуковой преобразователь и зеркало, посредством которого звук направляется на стенку трубы. Этот же преобразователь принимает эхо (эхо-сигналы) обратного рассеяния от стенки трубы. Этот известный способ имеет ряд ограничений, например:
должно быть обеспечено практически идеальное выравнивание преобразователя; в противном случае эхо-сигналы не будут обнаружены;
поверхность стенки трубы должна быть гладкой; в противном случае сигнал нельзя будет использовать;
не обнаруживаются трещины и коррозионное изъязвление.
В патенте EP1707956 раскрыты способ и система для обнаружения глубины трещин в трубе. Система включает в себя внутритрубный дефектоскоп, который сконфигурирован для посылки ультразвуковых сигналов по окружности в стенки трубопровода и приема отраженных сигналов. В этом документе описан пример, в котором вокруг внутритрубного дефектоскопа расположено множество датчиков, которые приспособлены для передачи ультразвуковых сигналов, попадающих на стенку трубопровода под определенным углом. Поверхности стенки трубы, а также трещины в стенке действуют как ультразвуковые отражатели, которые создают отражение с различными временами задержки. Отражения от поверхностей стенки повторяются с так называемыми «расстояниями однократного отражения», зависящими от толщины стенки. Отражения от трещин можно отличить, поскольку они принимаются с другими задержками. Расстояние до отражателя определяют по времени задержки и троссировке ультразвукового луча для имитации пути отражений. Расстояние до отражателей используют для оценки глубины трещины. В качестве оценочной глубины трещины используют максимальную из глубин, определенных разными датчиками.
В этой известной системе определяются лишь глубины отдельных трещин. Система не пытается использовать процесс формирования изображений для создания изображения стенки трубы. Кроме того, эта известная система основана на направленных датчиках, создающих лучи, которые попадают на стенку трубопровода под известным углом. Это открывает возможность использования трассировки луча для определения глубины.
Обнаружено, что на практике поверхность стенки трубы может быть неровной, с непостоянными вариациями толщины из-за коррозии и износа, а не только с изолированными трещинами. Из-за значительных различий скорости звука между стенкой трубы и текучей средой в трубе указанная неравномерность приводит к значительному рассеянию ультразвуковых лучей под непредсказуемыми углами. Это обстоятельство приводит к тому, что формирование изображений с помощью системы, описанной в патенте EP1707956, оказывается весьма ненадежным в случае труб, подверженных коррозии и износу.
Сущность изобретения
Среди прочего целью изобретения является обеспечение улучшенного контроля состояния труб.
Предложены способ согласно п.1 и система согласно п.8.
В них излучают и принимают множества ультразвуковых сигналов, имеющих основные направления в плоскости, преимущественно перпендикулярной продольному направлению оси трубы. Излученные сигналы и сигналы обратного рассеяния обрабатывают с использованием процесса формирования изображений с высоким разрешением на основе времени передачи излученных сигналов и сигналов обратного рассеяния. Процесс формирования изображения создает изображение, например, интенсивности обратного рассеяния как функции положения на указанной плоскости. Предпочтительно, каждый сигнал из множества излучается и/или принимается под углами, распределенными по плоскости. Предпочтительно, диаметр указанного выходного и/или входного отверстия, используемого для излучения и/или приема, выбирается достаточно малым по отношению к частоте излучения преобразователя, на которой преобразователь передает ультразвуковые сигналы, так что ультразвуковой сигнал передачи от каждого отверстия отклоняется по достаточно большой площади к стенке трубы и/или так, что каждое отверстие принимает каждый сигнал, обратно отраженный от достаточно большой площади стенки трубы. Это можно реализовать путем использования, например, выходных и/или входных отверстий, имеющих диаметр величины длины волны ультразвука, например, диаметр в окружном направлении, не больше, чем две длины волны ультразвука в текучей среде в трубе на частоте излучения звука преобразователем. Эти отверстия могут иметь больший диаметр в аксиальном направлении.
В одном варианте сигналы обрабатывают с применением принципа Ферма, который утверждает, что путь, принимаемый звуковым лучом между двумя точками, есть путь, который может быть пройден за наименьшее время. Применение принципа Ферма может содержать определение времен передачи, связанных с набором путей от и/или к преобразователю, и выбор пути, имеющего наименьшее время передачи. Было обнаружено, что это обеспечивает более надежное решение при обработке неровностей стенок трубы, являющихся результатом коррозии и износа. Это дает преимущества для варианта, где для обработки сигналов с целью получения изображения внутренности стенки трубы используют оценку местоположения поверхности стенки трубы.
В одном варианте учитывают передачу звука и скорость звука в гомогенной среде в трубе, а также:
передачу звука и скорость звука в стенке трубы,
рефракцию звука на границе между средой в трубе и стенкой трубы, и
отражения в стенке трубы;
эффективно определяют пути передачи звука в трубе, а также в стенке трубы, и эффективно применяя принцип Ферма, устанавливающего, что путь, принимаемый звуковым лучом между двумя точками, есть путь, который может быть пройден за наименьшее время;
представляют изображение стенки трубы для облегчения визуальной интерпретации результатов измерений.
Матрицы преобразователей приспосабливают для излучения и приема множества сигналов во множестве направлений, в основном перпендикулярных оси трубы, в сочетании с использованием преобразователей, имеющих выходные/входные отверстия с размерами порядка длины волны используемого ультразвука, что заставляет ультразвуковой сигнал передачи расходиться и отражаться, или обратно рассеиваться по достаточно большой площади стенки трубы. Преобразователи в матрице могут использоваться одновременно или последовательно. Поскольку звук отражается (обратно рассеивается) на большой площади, комплекс излученных сигналов и сигналов обратного рассеяния можно (и следует) использовать в процессе формирования изображений с высоким разрешением на основе времени передачи излученных сигналов и сигналов обратного рассеяния, чтобы все нужное место получить в подробном изображении, которое может быть выполнено из поперечного сечения (соответствующего плоскости, преимущественно перпендикулярной оси трубы). Заметим, что процессы формирования изображений с высоким разрешением широко известны в различных областях техники, например, в области медицинской (ультразвуковой) сонографии и в сейсмических исследованиях [A.J. Berkhout. Applied seismic wave theory. ISBN 0-444-42898-4. Elsevier Science Publishers B.V., 987].
Шаги формирования изображений предпочтительно содержат:
а. Формирование изображения данных с помощью модели, которая включает в себя только скорость жидкости (с учетом скорости звука в жидкости в трубе) с использованием, в частности, отражений от внутренней поверхности трубы.
b. Нахождение внутренней поверхности трубы.
с. Обновление модели скорости, включая скорость звука в стенке трубы в модели.
d. Изображение стенки трубы, ее внутренней и ее внешней поверхности, а также особенностей, таких как дефекты в стенке трубы.
Формирование изображения стенки трубы, ее внутренней и ее внешней поверхности, а также таких особенностей, как дефекты в стенке трубы, предпочтительно содержит:
а. Задание сетки из точек в стенке трубы.
b. Вычисление для каждой точки сетки времени передачи звука для пути звука между каждой парой излучающего элемента и принимающего элемента через указанную точку сетки.
c. Определение для каждой точки сетки суммы откликов, соответствующих вычисленным временам передачи звука, с применением истинных амплитудных весов излучаемых сигналов и сигналов обратного рассеяния.
Если точка сетки соответствует части стенки трубы, рассеивающей звук, взвешенная сумма откликов будет безусловно иметь ненулевое значение (с уровнем, превышающим уровень шума). Обыкновенно времена передачи звука вычисляют с использованием способов трассировки луча. Согласно одному аспекту, времена передачи звука предпочтительно определять более эффективно с применением принципа Ферма путем выбора набора соседних путей передачи звука, вычисления соответствующих времен передачи звука и выбора пути звука с кратчайшим временем прохождения. Преимущества раскрытого способа измерения заключаются в следующем:
нечувствительность к нормальным ошибкам выравнивания;
высокое разрешение, позволяющее обнаруживать малые дефекты;
нечувствительность к поверхностным неровностям.
Краткое описание чертежей
Эти и другие цели и преимущественные аспекты изобретения станут очевидными из описания примерных вариантов с использованием следующих чертежей.
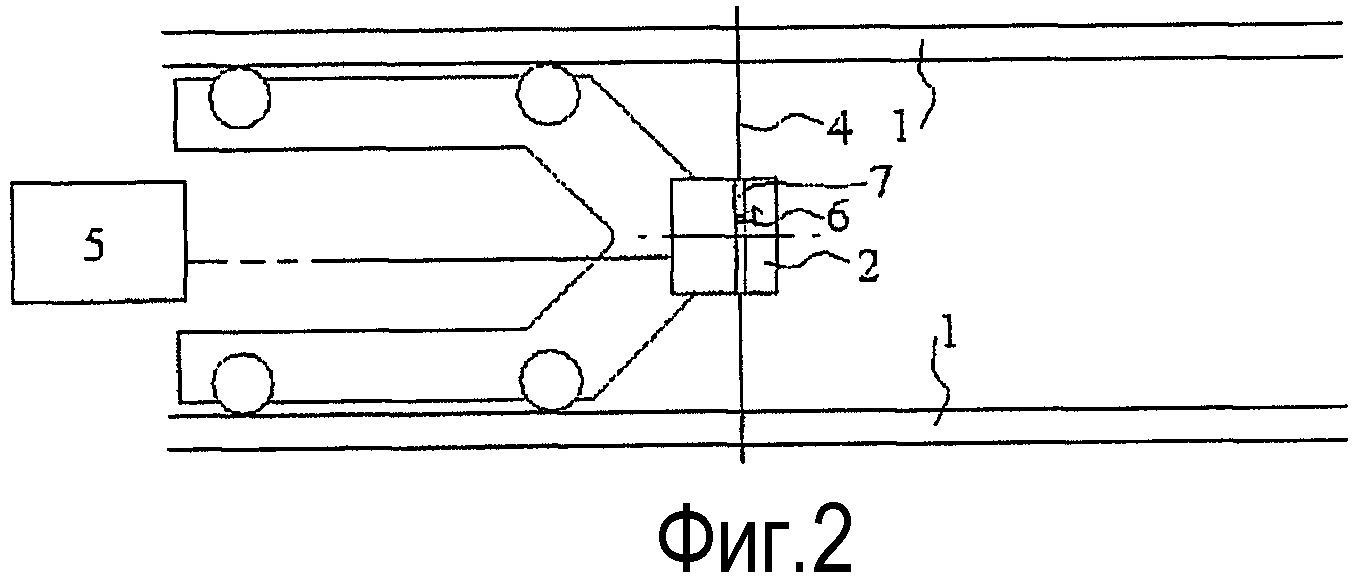
Фиг.1 - первый вариант системы.
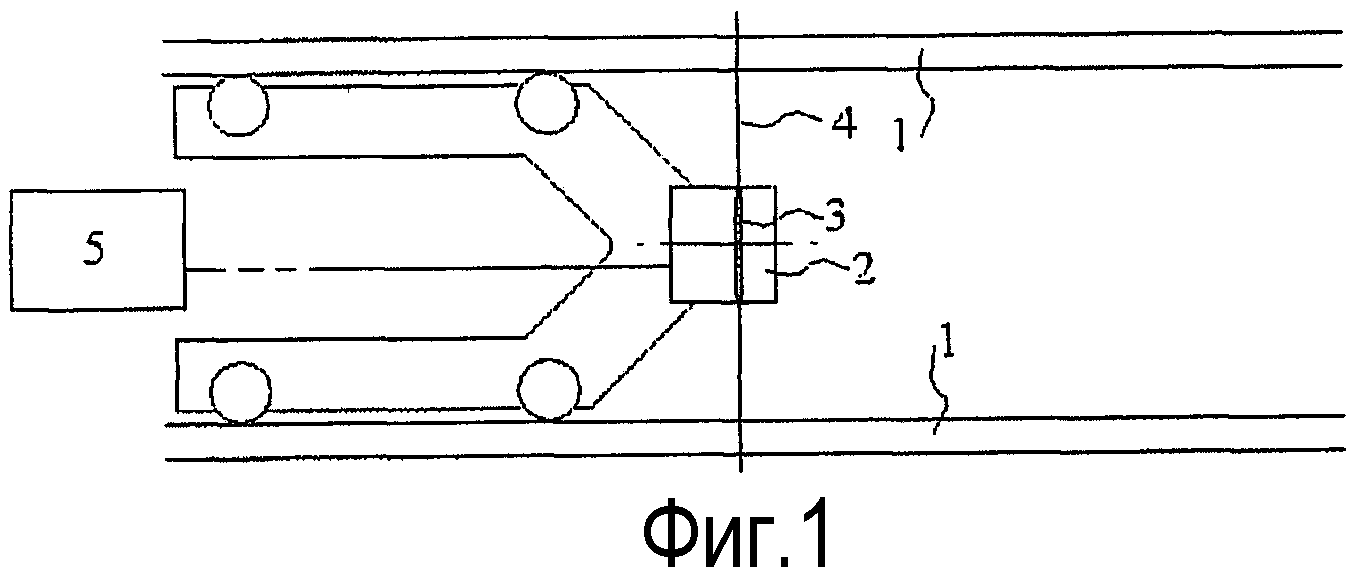
Фиг.2 - второй вариант системы.
Подробное описание примерных вариантов осуществления изобретения
На фиг.1 показан примерный вариант системы для обнаружения дефектов в стенке 100 трубы, содержащей ультразвуковые преобразователи 2, приспособленные для излучения через выходное отверстие ультразвуковых сигналов из внутренней части трубы в направлении стенки 1 и для приема через входное отверстие сигналов обратного рассеяния от ее стенки 1. В этом примерном варианте преобразователи содержат преимущественно круговую матрицу ультразвуковых преобразователей 3, приспособленных для излучения и приема множества сигналов, имеющих разные основные направления в плоскости 4, преимущественно перпендикулярной оси трубы. Преобразователи 3 соединены с управляющим модулем 5, который приспособлен подавать энергию преобразователям 3 для излучения сигналов, то есть сигнальных импульсов. Эти сигнальные импульсы могут излучаться одновременно, последовательно или смешанным образом. Сигнальные импульсы обратного рассеяния могут приниматься теми же самыми преобразователями во временных интервалах (интервалах приема) между временными интервалами (интервалами излучения), в которых излучаются сигнальные импульсы в направлении стенки трубы. Сигнальные импульсы обратного рассеяния передаются в управляющий модуль 5 и обрабатываются там или в другом процессоре. Используемый здесь термин «процессор» может относиться к программируемому процессору, снабженному программой (например, в его памяти или на диске) для выполнения описанных операций. Вместо процессора можно использовать схему, которая аппаратно-реализована для выполнения указанных операций. Процессор может содержать множество подпроцессоров для выполнения соответствующих задач из этих операций.
Диаметр выходных отверстий (для импульсного излучения) и входных отверстий (для импульсного приема) преобразователей имеет в основном величину длины волны используемых ультразвуковых сигналов, что заставляет расходиться сигнальные импульсы и, вследствие этого, облучать достаточно большую площадь стенки трубы, и быть восприимчивыми к различного рода дефектам стенки трубы.
В варианте каждый преобразователь реализован как тело из пьезоэлектрического материала, которое может действовать как излучатель при приложении к нему электрического поля или как приемник при обнаружении электрического поля, созданного указанным телом. В данном варианте выходное отверстие и входное отверстие преобразователя может определяться упомянутым телом. Таким образом, диаметр выходного отверстия и входного отверстия может соответствовать диаметру тела из пьезоэлектрического материала. Круговая матрица из таких тел может быть предусмотрена по окружности цилиндра с целью ее использования внутри трубы. В другом варианте множество преобразователей может быть реализовано на одном теле из пьезоэлектрического материала с множеством пар электродов, обращенных к телу в соответствующих местах, причем каждая пара определяет выходное отверстие и входное отверстие соответствующего преобразователя.
Предпочтительно, диаметр выходного отверстия и входного отверстия в окружном направлении трубы представляет собой самое большее двойную длину волны ультразвукового сигнала в трубе. Например, можно использовать диаметр между половиной и двумя длинами волн или между половиной и одной длиной волны. Таким образом, можно реализовать по существу всенаправленное ультразвуковое излучение, распределенное в радиальных направлениях, перпендикулярных осевому направлению трубы. Диаметр выходного отверстия и входного отверстия в осевом направлении трубы может быть больше, например, составлять по меньшей мере пять длин волн, чтобы обеспечить излучение, сконцентрированное по существу в плоскости, перпендикулярной осевому направлению трубы.
Излученные сигнальные импульсы и сигнальные импульсы обратного рассеяния (включая времена их задержки/передачи) обрабатывают в обрабатывающем модуле или дополнительных обрабатывающих/вычислительных средствах с использованием подходящего процесса формирования изображений с высоким разрешением, например, процесса, описанного в работе E.Luiten TNO-report IS-RPT-060054, Delft, 17 February 2006. Verbeterde afbeeldingstechnieken voor ultrageluid (Улучшенные способы формирования изображений для ультразвука; на голландском языке).
Короче говоря, указанный процесс обеспечивает создание изображения с использованием томографических способов. Используемое здесь изображение содержит значения изображения, связанные с пространственными местоположениями, распределенными по меньшей мере в двумерной области. С помощью сигналов, полученных при осевой компоновке преобразователей в трубе, можно получить двумерное изображение значений изображения в плоскости, перпендикулярной оси трубы, например, как функции радиального расстояния от оси трубы и угла по окружности вокруг оси трубы. С помощью повторных измерений в разных аксиальных местоположениях вдоль трубы можно получить трехмерное изображение.
В случае излученных сигнальных импульсов и сигнальных импульсов обратного рассеяния значения изображения представляют интенсивность обратного рассеяния из пространственных местоположений. Отдельный сигнал обратного рассеяния от отверстия преобразователя и обратно в отверстие обеспечивает интенсивность обратного рассеяния как функцию времени. Для любого одного момента времени эта интенсивность обратного рассеяния является суммой вкладов интенсивностей обратного рассеяния от набора пространственных местоположений, которые дают одно и то же время задержки ультразвукового распространения в и от местоположения через отверстия. Время задержки может быть присвоено каждой комбинации из излучающего преобразователя, местоположения пикселя в таком изображении и принимающего преобразователя. Присвоенное время задержки является временем задержки между излучением и приемом ультразвукового сигнала, который излучается излучающим преобразователем, отражается материалом в том месте трубы, которое соответствует местоположению пикселя, и принимается принимающим преобразователем. Таким образом, когда амплитудный сигнал отражения как функция времени рассматривается для комбинации излучающего преобразователя и принимающего преобразователя, каждый момент времени соответствует набору местоположений пикселей в изображении с присвоенными временами задержки, равными значению времени для данного момента времени.
В томографических способах множество таких комбинаций излучающего преобразователя и принимающего преобразователя используют для реализации пространственного разрешения интенсивности обратного рассеяния. В процессе, описанном Luiten, это соответствует вычислению интенсивности обратного рассеяния для пространственных местоположений, которые соответствуют местоположениям изображения посредством определения времен задержек, связанных с этим пространственным местоположением для каждой комбинации излучающего преобразователя и принимающего преобразователя и суммирования сигналов обратного рассеяния для этих комбинаций при данных временах задержки. В результате, создается изображение вычисленных интенсивностей обратного рассеяния как функции местоположения.
В варианте используют вычисление посредством первого и второго прохода. Причина этого состоит в том, что времена задержки, связанные с пространственными местоположениями в стенке трубы, зависят от формы стенки трубы, которая может быть непредсказуемой из-за коррозии и износа. Соответственно, первый проход используют, в котором вычисляют первое изображение интенсивности обратного рассеяния в предположении, что скорость распространения ультразвука не зависит от пространственного положения. Конечно, это предположение не соответствует реальности, поскольку скорость распространения ультразвука в текучей среде в трубе и в стенке трубы значительно отличаются друг от друга. Однако первое изображение для интенсивности обратного рассеяния предоставляет информацию, открывающую возможность определить положение внутренней поверхности стенки трубы. Это дает возможность выполнить второй проход, при котором вычисляют второе изображение для интенсивности обратного рассеяния в предположении, что скорость распространения ультразвука имеет первое и второе значение, соответствующие скорости в текучей среде и в стенке трубы, внутри и вне внутренней поверхности, которая была определена из первого изображения соответственно. Необязательно, могут быть использованы дополнительные проходы, подобные второму проходу, где второе изображение, созданное предшествующим проходом, заменяет первое изображение.
Соответственно, упомянутый процесс предпочтительно содержит:
а. Вычисление первого изображения с использованием модели скорости звука (например, значений скорости звука как функции пространственного местоположения), которая включает в себя только скорость жидкости для всех положений (с учетом скорости звука в жидкости в трубе) с использованием, в частности, отражений от внутренней поверхности трубы.
b. Нахождение внутренней поверхности трубы из первого изображения.
с. Обновление модели скорости путем включения в модель скорости звука в стенке трубы, ограниченной внутренней поверхностью, найденной из первого изображения.
d. Вычисление второго изображения с использованием обновленной модели для построения изображения стенки трубы, ее внутренней и ее внешней поверхности и особенностей, подобного дефектам в стенке трубы.
Вычисление второго изображения стенки трубы, ее внутренней и ее внешней поверхности, и особенностей, подобных дефектам в стенке трубы, предпочтительно содержит:
а. Задание сетки из точек в стенке трубы.
b. Вычисление для каждой точки сетки и для каждой пары из излучающего элемента и принимающего элемента времени передачи звука вдоль пути звука от излучающего элемента в паре к принимающему элементу в паре посредством отражения от указанной точки сетки.
c. Определение для каждой точки сетки суммы откликов обратного рассеяния, определенных с помощью разных одних из пар при вычисленных временах передачи звука для этих пар.
Факультативно, при определении суммы можно применять веса амплитуд. Если точка сетки соответствует части стенки трубы, рассеивающей звук, взвешенная сумма откликов будет безусловно иметь ненулевое значение (с уровнем, превышающим уровень шума).
Таким путем вычисление второго изображения зависит от внутренней поверхности стенки трубы, которая была найдена из первого изображения. Следовательно, положение внутренней поверхности, а значит и время передачи звука не имеют предопределенного значения. На это значение может повлиять коррозия и износ, и оно может зависеть от положения по окружности и осевого направления в трубе.
В традиционных способах формирования изображений подобного типа времена передачи звука для использования в данном способе вычисляют, применяя способы трассировки луча. Однако было обнаружено, что это приводит к ошибкам, когда подобный способ применяется к формированию изображения внутренней части стенки трубы, подвергающейся коррозии и износу. Большое различие между скоростью звука в текучей среде в трубе и в материале стенки трубы (например, металл) проявляется в том, что малые ошибки в модели внутренней поверхности могут привести к большим ошибкам трассировки луча. Также возможная неравномерность исследуемой поверхности может привести к тому, что неточности вычисления при трассировке луча могут иметь следствием большие ошибки.
Согласно одному аспекту, времена передачи звука предпочтительно определять более эффективно, используя принцип Ферма. Использование принципа Ферма содержит выбор набора соседних путей передачи звука от излучающего элемента к принимающему элементу пары через соответствующую точку сетки, вычисление соответствующих времен передачи звука и выбор пути звука с кратчайшим временем прохождения для комбинации точки сетки и пары. Это повышает устойчивость процесса к ошибкам того типа, которые появляются при использовании подхода трассировки луча.
На фиг.2 показан слегка модифицированный примерный вариант системы для обнаружения дефектов в стенке 1 трубы, содержащей средства 2 ультразвуковых преобразователей, которые приспособлены для излучения через выходное отверстие ультразвуковых сигналов из внутренней части трубы в направлении ее стенки 1 и для приема через входное отверстие сигналов обратного рассеяния от ее стенки 1. В этом примерном варианте средства преобразователей содержат по меньшей мере один ультразвуковой преобразователь 6 и вращающиеся или крутящиеся (смотри стрелку) направляющие средства 7, которые приспособлены для обеспечения того, чтобы ультразвуковые сигнальные импульсы излучались в и импульсы обратного рассеяния принимались со всех направлений в перпендикулярной плоскости 4 через средства 2 преобразователей. Вращающиеся направляющие средства 7 предпочтительно приводятся в движение шаговым двигателем (в явном виде не показан) под управлением управляющего модуля 5. В остальном этот примерный вариант аналогичен варианту по фиг.1.
Направляющее средство может представлять собой поворотное колесо, на котором смонтирован преобразователь, для управления перемещением преобразователя путем перемещения колеса. Скорость вращения колеса может быть гораздо меньше скорости звука. Таким образом, можно получить интенсивность обратного рассеяния как функцию времени от одного положения преобразователя по существу обратно до этого положения для ряда положений преобразователя, проходимых благодаря вращению колеса. В другом варианте направляющее средство может представлять собой щель между двумя частями корпуса, вдоль которой направляется преобразователь. В этом случае части корпуса можно также использовать для приложения электрических потенциалов к преобразователю вдоль краев щели. В другом варианте направляющее средство может представлять собой вращающуюся конструкцию с отверстием, которое направляет ультразвук наружу к стенке трубы.
В итоге, получается система для обнаружения дефектов в стенке (1) трубы, содержащая средства (2) ультразвуковых преобразователей, которые приспособлены для излучения через выходное отверстие ультразвуковых сигналов из внутренней части трубы в направлении ее стенки и для приема через входное отверстие сигналов 5 обратного рассеяния от ее стенки. В этой системе средства преобразователей приспособлены излучать и принимать множество сигналов, имеющих основные направления в плоскости (4), преимущественно перпендикулярной оси трубы. Диаметр указанного выходного и/или входного отверстия средств преобразователей имеет в основном величину длины волны используемых ультразвуковых сигналов. Комплекс излученных сигналов и сигналов обратного рассеяния обрабатывается в обрабатывающем средстве (5) с использованием процесса формирования изображений с высоким разрешением на основе времени передачи излученных сигналов и сигналов обратного рассеяния.
В варианте средства преобразователей содержат преимущественно круговую матрицу (3) ультразвуковых преобразователей, расположенных в указанной плоскости.
В варианте средства преобразователей содержат по меньшей мере один ультразвуковой преобразователь и направляющее средство (6), приспособленное обеспечивать, чтобы сигналы излучались в и импульсы обратного рассеяния принимались со всех направлений в перпендикулярной плоскости через средства преобразователей. В варианте обрабатывающее средство (5) содержит средство для:
а. формирования изображения данных с помощью модели, которая включает в себя только скорость жидкости, с учетом скорости звука в жидкости в трубе;
b. нахождения внутренней поверхности трубы;
с. обновления модели скорости, включая скорость звука в стенке трубы в модели;
d. формирования изображения стенки трубы, ее внутренней и ее внешней поверхности, и особенностей, подобных дефектам в стенке трубы, с применением принципа Ферма к пучкам соседних путей передачи звука.
Контроль коррозии
Ультразвуковое моделирование
Контроль коррозии
Ультразвуковое моделирование

