Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к устройству управления сцеплением гибридного транспортного средства.
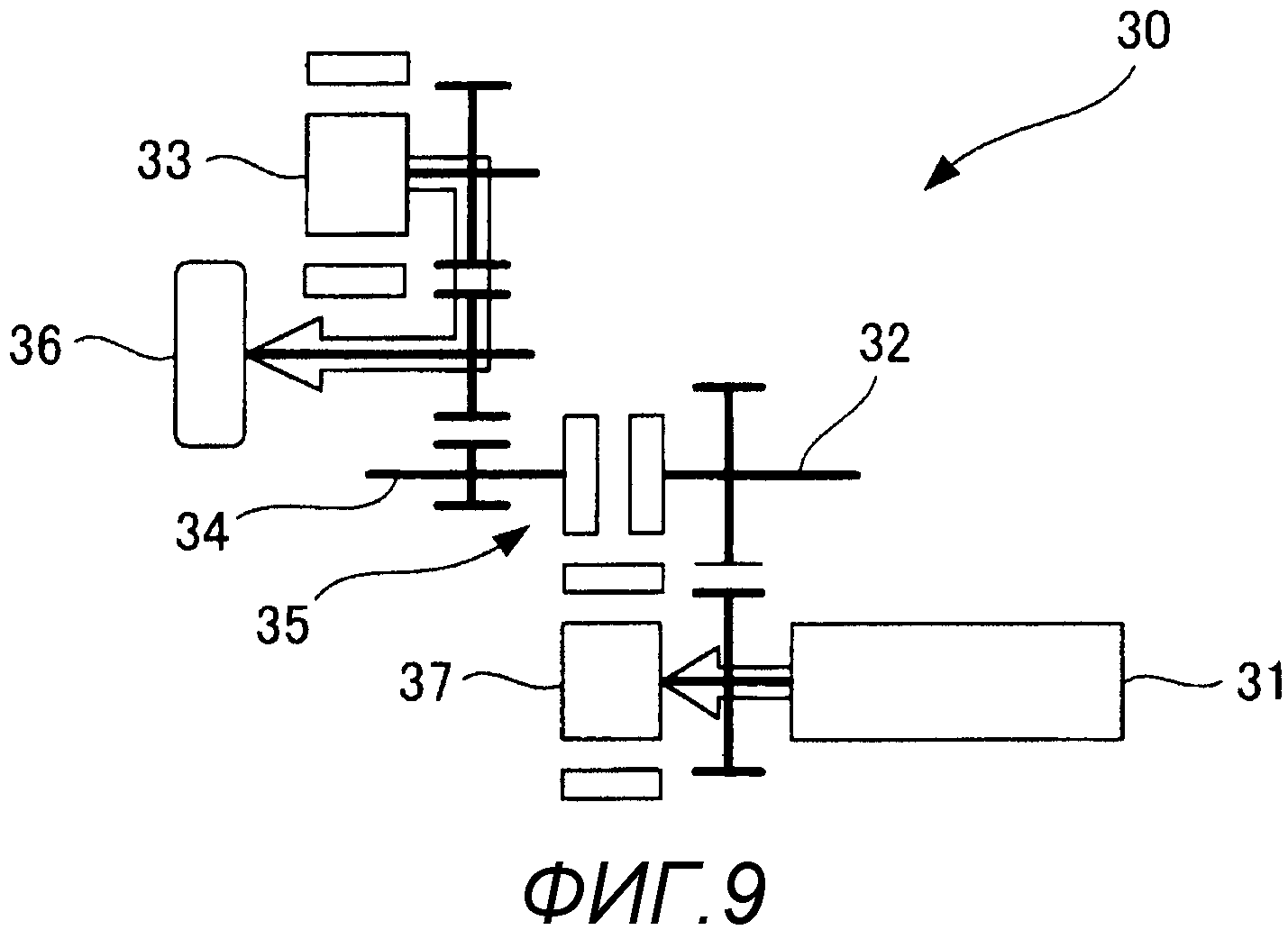
Гибридное транспортное средство, оборудованное двигателем и электродвигателем, имеет различные режимы привода, включающие в себя режим EV-привода, режим последовательного привода и режим параллельного привода. Как показано на фиг.8-10, такое гибридное транспортное средство включает в себя сцепление 35, которое зацепляет/отпускает коленчатый вал 32 двигателя на стороне двигателя 31 с/от вала 34 электродвигателя на стороне электродвигателя 33, и гибридное транспортное средство удерживает сцепление 35 во включенном (зацепленном) состоянии/выключенном (отпущенном) состоянии на основе режима привода (см., например, японский патент № 3702897B). Любое сцепление мокрого типа (однодисковое/многодисковое) и сухого типа (однодисковое/многодисковое) может использоваться в качестве сцепления. Далее в данном документе оба типа будут называться сцеплением.
В данном документе, обращаясь к фиг.8-10, будут описаны взаимосвязи между каждым из режимов привода и сцеплением.
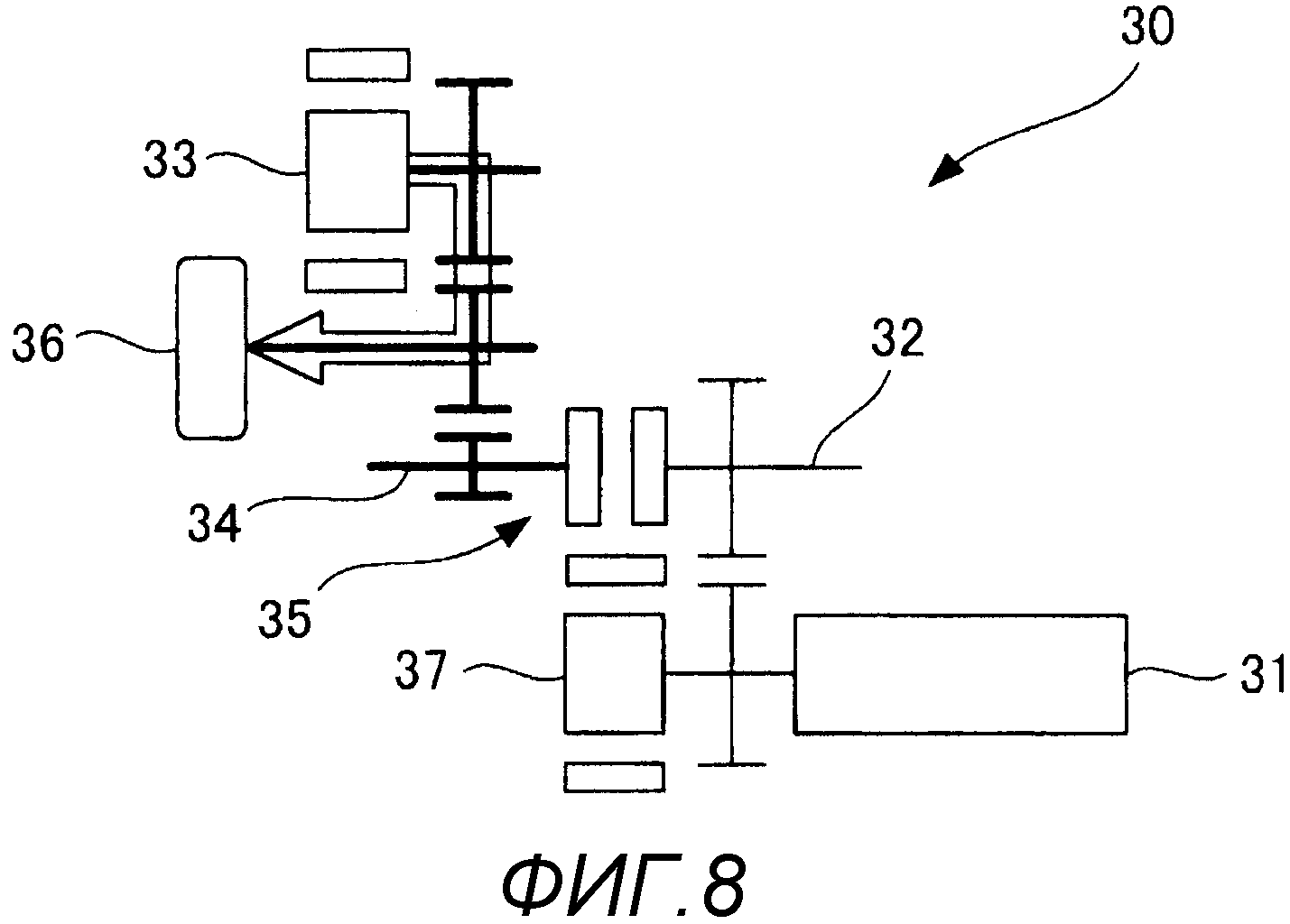
В режиме EV-привода колесо 36 транспортного средства 30 приводится в движение посредством вращения электродвигателя 33, как показано на фиг.8. В этом случае двигатель 31 останавливается, генерирование электричества посредством генератора 37 также прекращается, и сцепление 35 находится в выключенном состоянии.
В режиме последовательного привода электричество генерируется генератором 37 посредством приведения в действие двигателя 31, а электродвигатель 33 приводится в действие с помощью электричества, сгенерированного генератором 37, а также электричества, накопленного в аккумуляторе (не показан), так что колесо 36 транспортного средства приводится в движение, как показано на фиг.9. Даже в этом случае сцепление 35 находится в выключенном состоянии.
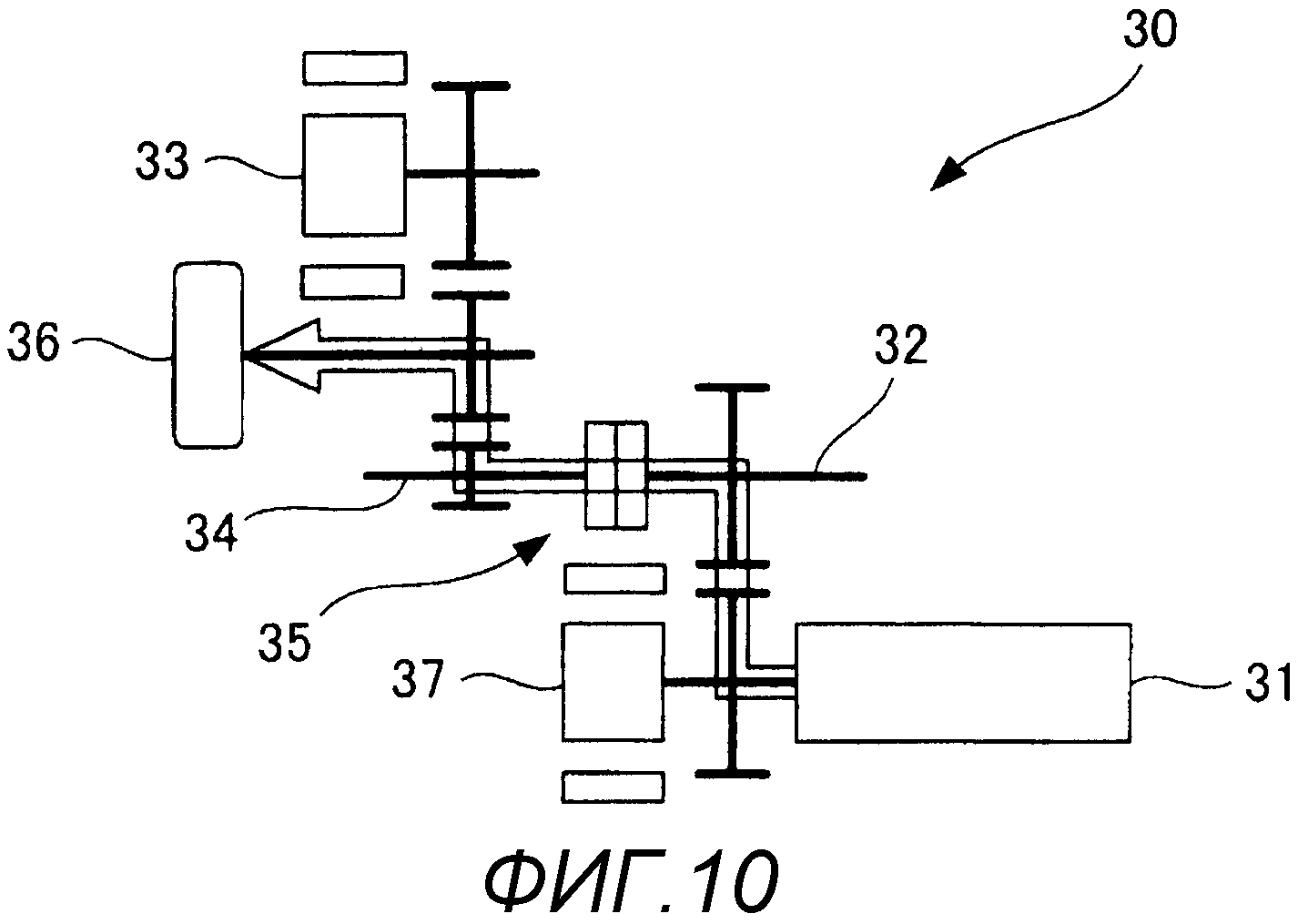
Тем временем, в параллельном режиме привода колесо 36 транспортного средства 30 приводится в движение посредством приведения в действие двигателя 31, и сцепление 35 находится в зацепленном состоянии. В результате, движущая сила двигателя 31 передается в сторону вала 34 электродвигателя (сторону ведущего вала), как показано на фиг.10. В режиме параллельного привода колесо 36 транспортного средства 30 может приводиться в движение посредством приведения в действие как двигателя 31, так и электродвигателя 33.
Как описано выше, транспортное средство 30 приводится в движение, в то время как сцепление 35 выключено, и вал 32 двигателя и вал 34 электродвигателя находятся в механически выключенном состоянии, в режиме EV-привода и в режиме последовательного привода, в которых электродвигатель 33 используется в качестве движущей силы. В отличие от этого, в параллельном режиме привода, в котором двигатель 31 используется в качестве движущей силы, транспортное средство 30 приводится в движение, в то время как сцепление 35 включено, и вал 32 двигателя и вал 34 электродвигателя механически соединены друг с другом.
Соответственно, когда режим привода переключается с EV-режима привода или последовательного режима привода на параллельный режим привода, сцепление 35, которое было выключенным, включается, тогда как, когда режим привода переключается из параллельного режима привода на EV-режим привода или последовательный режим привода, сцепление 35, которое было включенным, выключается.
Максимальная движущая сила двигателя 31 имеет предварительно определенное значение в зависимости от скорости транспортного средства, в то время как максимальная движущая сила, которая может быть выведена электродвигателем 33, зависит не только от скорости транспортного средства, но также от возможной выходной мощности аккумулятора, которая может быть выведена аккумулятором (подробное описание будет сделано со ссылкой на фиг.2-4, которые будут описаны ниже). Когда режим привода переключается из параллельного режима привода на последовательный режим привода, движущая сила смещается от двигателя 31 к электродвигателю 33 посредством выключения сцепления 35, которое было включенным. Однако, сразу после выключения сцепления 35, если возможная выходная мощность аккумулятора не учитывается, существует большая разница между максимальной движущей силой двигателя 31 и максимальной движущей силой, которая может быть выведена электродвигателем 33, и возникает резкое изменение крутящего момента, так что гибридным транспортным средством некомфортно управлять.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, целью изобретения является предоставление устройства управления сцеплением гибридного транспортного средства, способного предотвращать возникновение резкого изменения крутящего момента при переключении режима привода гибридного транспортного средства.
Для того чтобы достигать цели, согласно изобретению, предоставляется устройство управления сцеплением гибридного транспортного средства, устройство управления сцеплением содержит: аккумулятор, который заряжается с помощью электричества, сгенерированного генератором; электродвигатель, который приводит в действие вал электродвигателя, который соединяется с ведущим валом гибридного транспортного средства, с помощью, по меньшей мере, одного из электричества, сгенерированного генератором, и электричества, накопленного в аккумуляторе; двигатель, который приводит в действие генератор и гибридное транспортное средство; сцепление; и блок управления, который получает возможную выходную мощность аккумулятора, которая может быть выведена аккумулятором, и который устанавливает скорость транспортного средства для изменения режима привода в зависимости от возможной выходной мощности аккумулятора, блок управления, который изменяет включенное состояние сцепления, в котором вал электродвигателя и вал двигателя сцеплены друг с другом, на выключенное состояние сцепления, в котором вал электродвигателя и вал двигателя отсоединяются друг от друга, и изменяет состояние привода от двигателя гибридного транспортного средства, в котором гибридное транспортное средство приводится в движение двигателем, на состояние привода от электродвигателя гибридного транспортного средства, в котором гибридное транспортное средство приводится в движение электродвигателем, когда скорость гибридного транспортного средства равна скорости транспортного средства для изменения режима привода.
Блок управления может получать возможную движущую силу электродвигателя, которая может быть выведена электродвигателем и которая соответствует скорости транспортного средства, на основе максимальной выходной мощности генерирования электроэнергии, которая выводится генератором, и максимальной выходной мощности аккумулятора, блок управления может получать максимальную движущую силу двигателя, которая выводится двигателем и которая соответствует скорости транспортного средства, и блок управления может устанавливать скорость, при которой разница между возможной движущей силой электродвигателя и максимальной движущей силой электродвигателя равна или меньше предварительно определенной разницы, в качестве скорости транспортного средства для изменения режима привода.
Блок управления может получать максимальную движущую силу электродвигателя, которая выводится электродвигателем и которая соответствует скорости транспортного средства, и блок управления может устанавливать скорость, при которой разница между максимальной движущей силой электродвигателя и максимальной движущей силой двигателя равна или меньше предварительно определенной разницы, в качестве скорости транспортного средства для изменения режима привода, когда возможная движущая сила электродвигателя равна или больше максимальной движущей силы электродвигателя.
В случае, где возможная выходная мощность аккумулятора равна или меньше выходной мощности при определении критической ситуации для определения предыдущего этапа переразряда аккумулятора, блок управления может предотвращать включение сцепления, независимо от скорости транспортного средства, и выключать сцепление, когда сцепление находится во включенном состоянии.
Блок управления может получать возможную выходную мощность аккумулятора из температуры и состояния заряда аккумулятора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
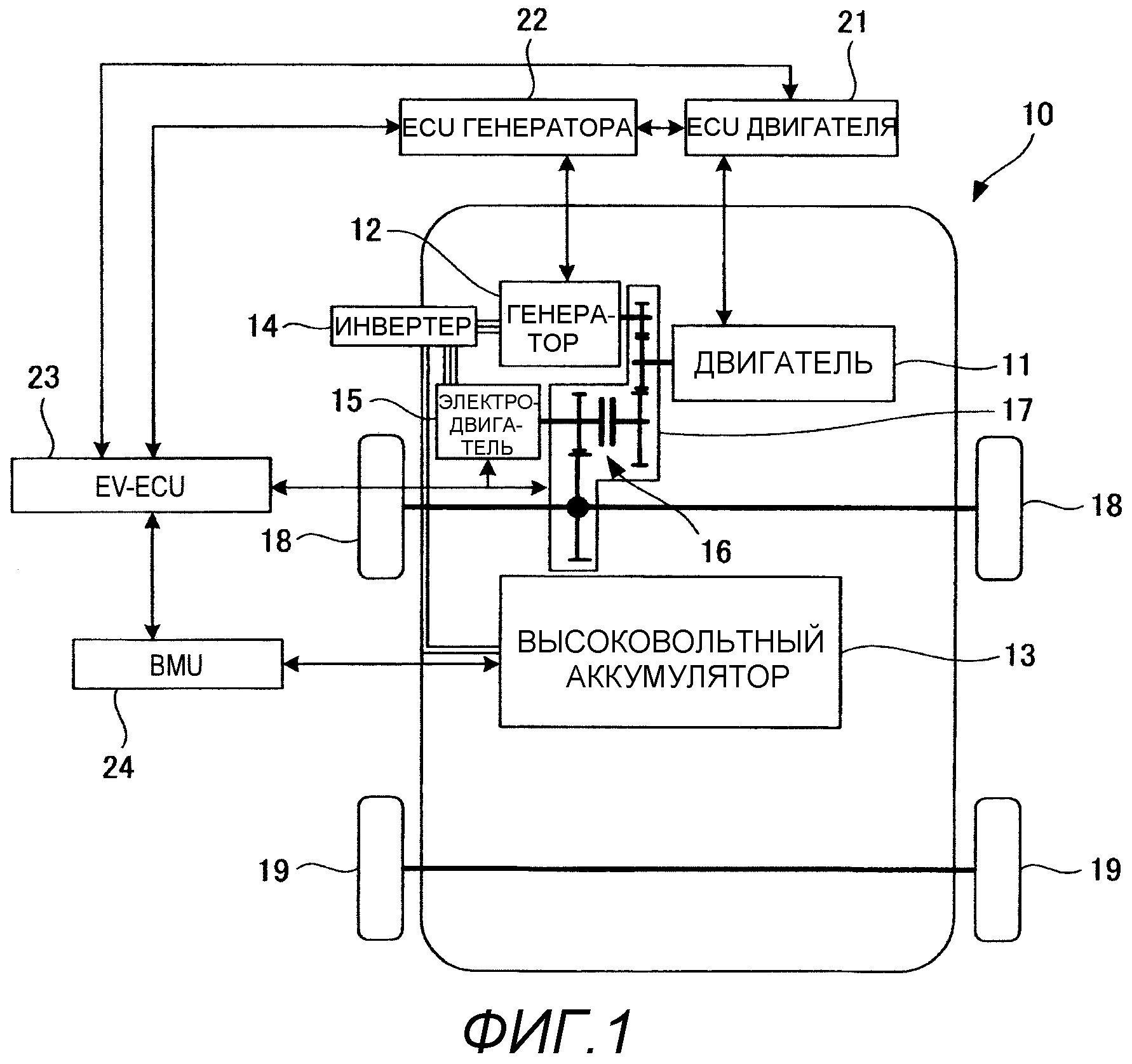
Фиг.1 - схема конфигурации транспортного средства, включающего в себя устройство управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения.
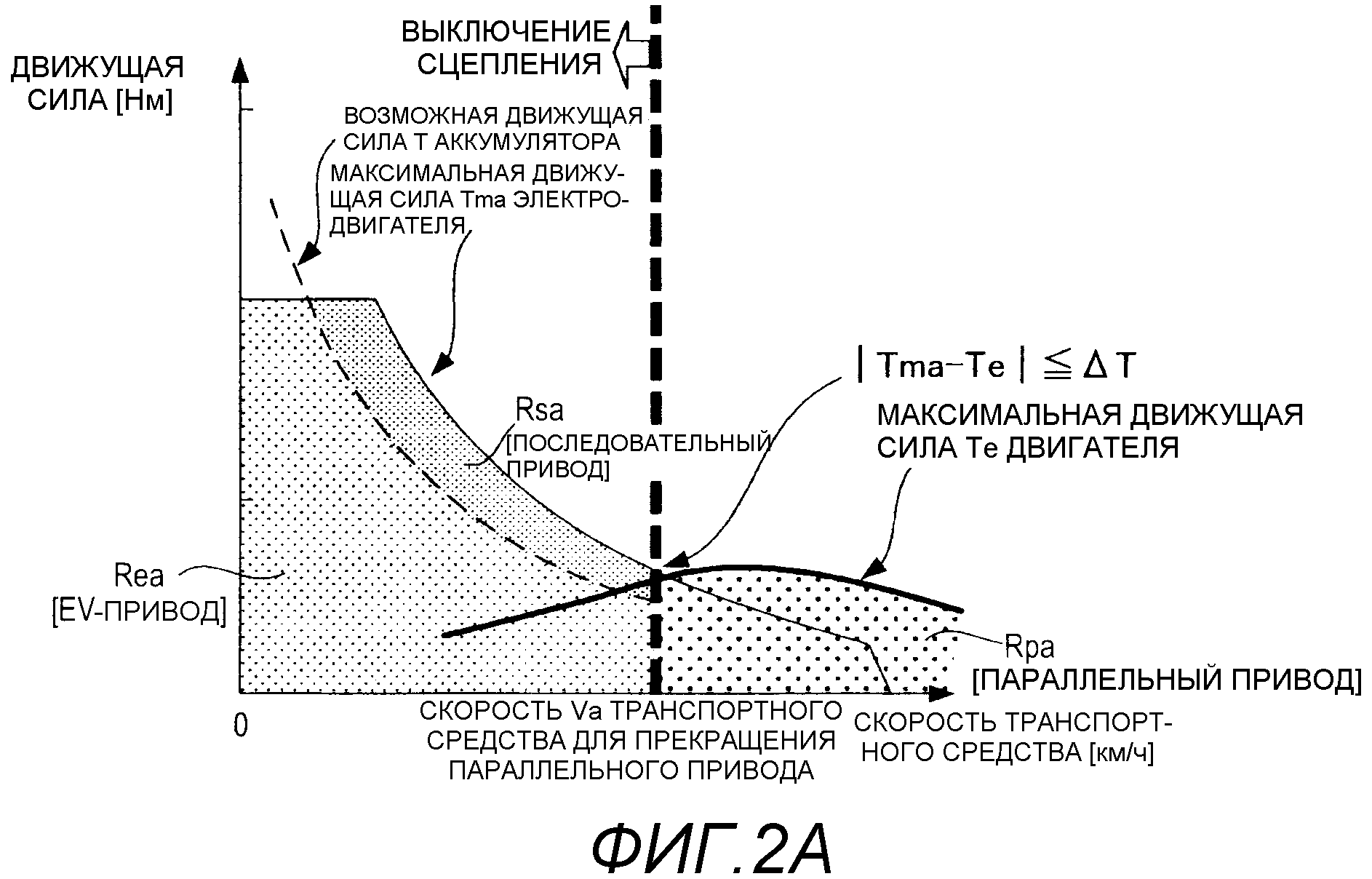
Фиг.2A и фиг.2B - схемы, объясняющие управление в устройстве управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения, и фиг.2A - график управления, когда возможная выходная мощность аккумулятора равна или больше предварительно определенной выходной мощности.
Фиг.3A и фиг.3B - схемы, объясняющие управление в устройстве управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения, и фиг.3A - график управления, когда возможная выходная мощность аккумулятора меньше предварительно определенной выходной мощности.
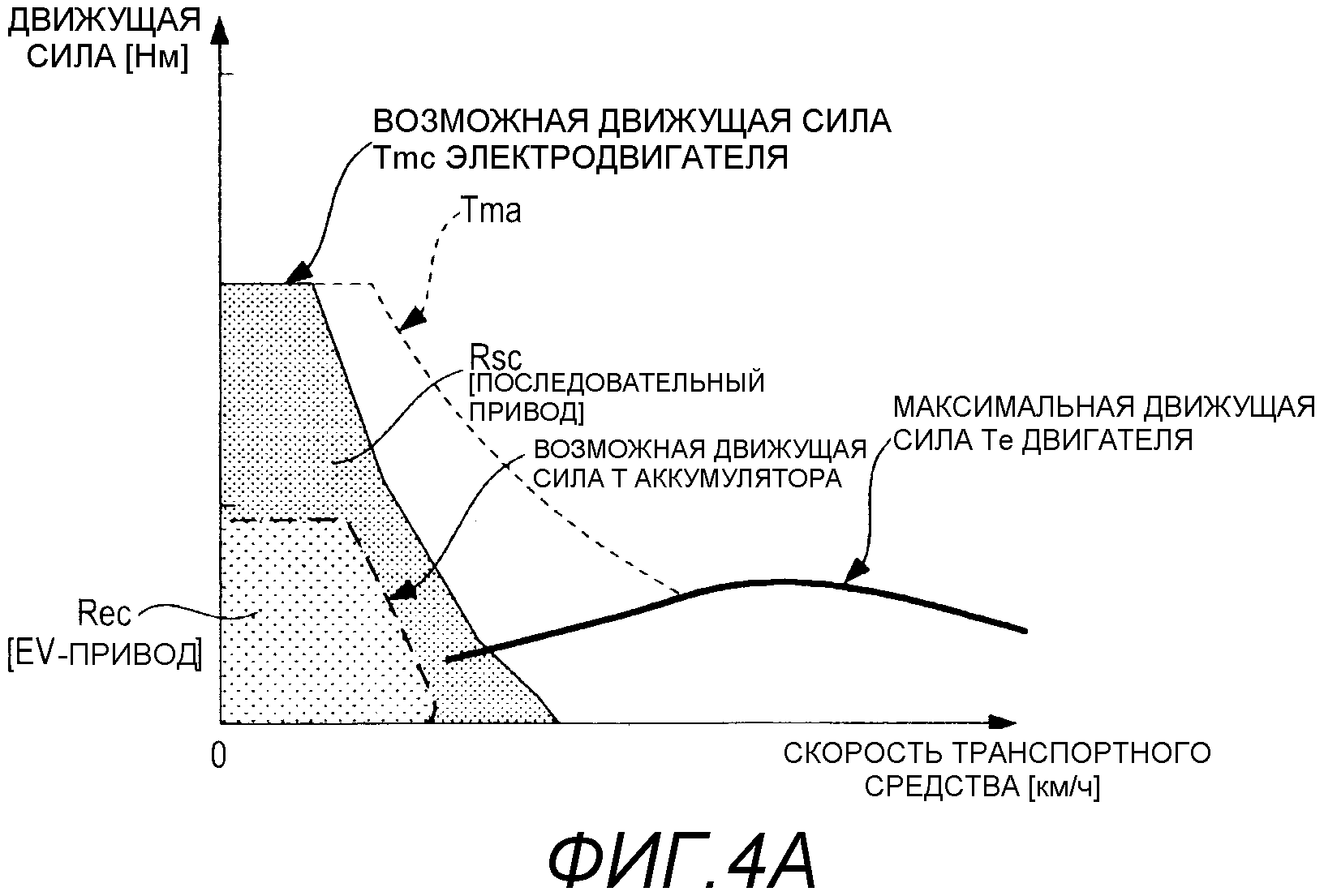
Фиг.4A и фиг.4B - схемы, объясняющие управление в устройстве управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения, и фиг.4A - график управления, когда возможная выходная мощность аккумулятора равна или меньше выходной мощности при определении критической ситуации.
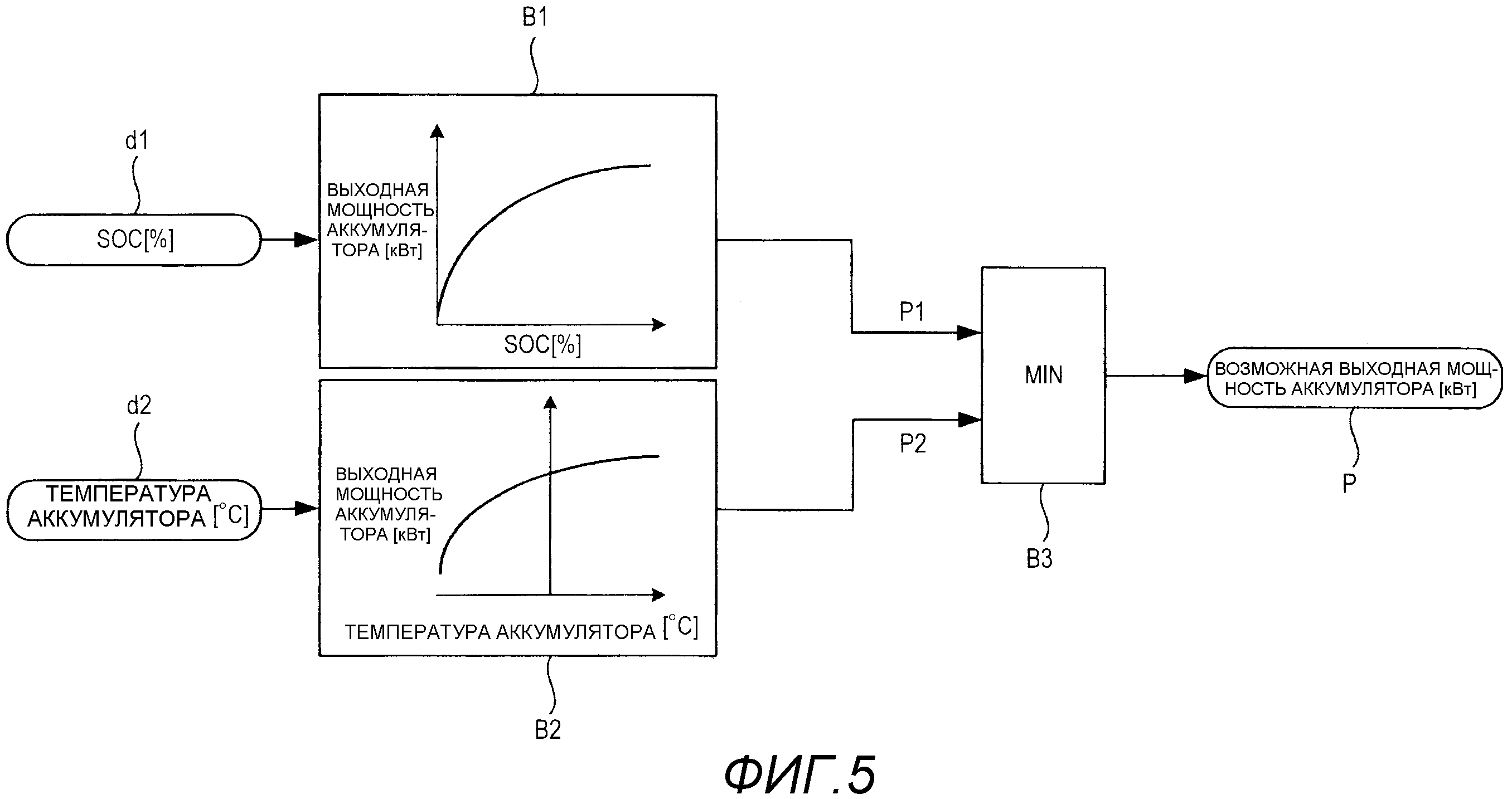
Фиг.5 - блок-схема, когда возможная выходная мощность аккумулятора вычисляется в устройстве управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения.
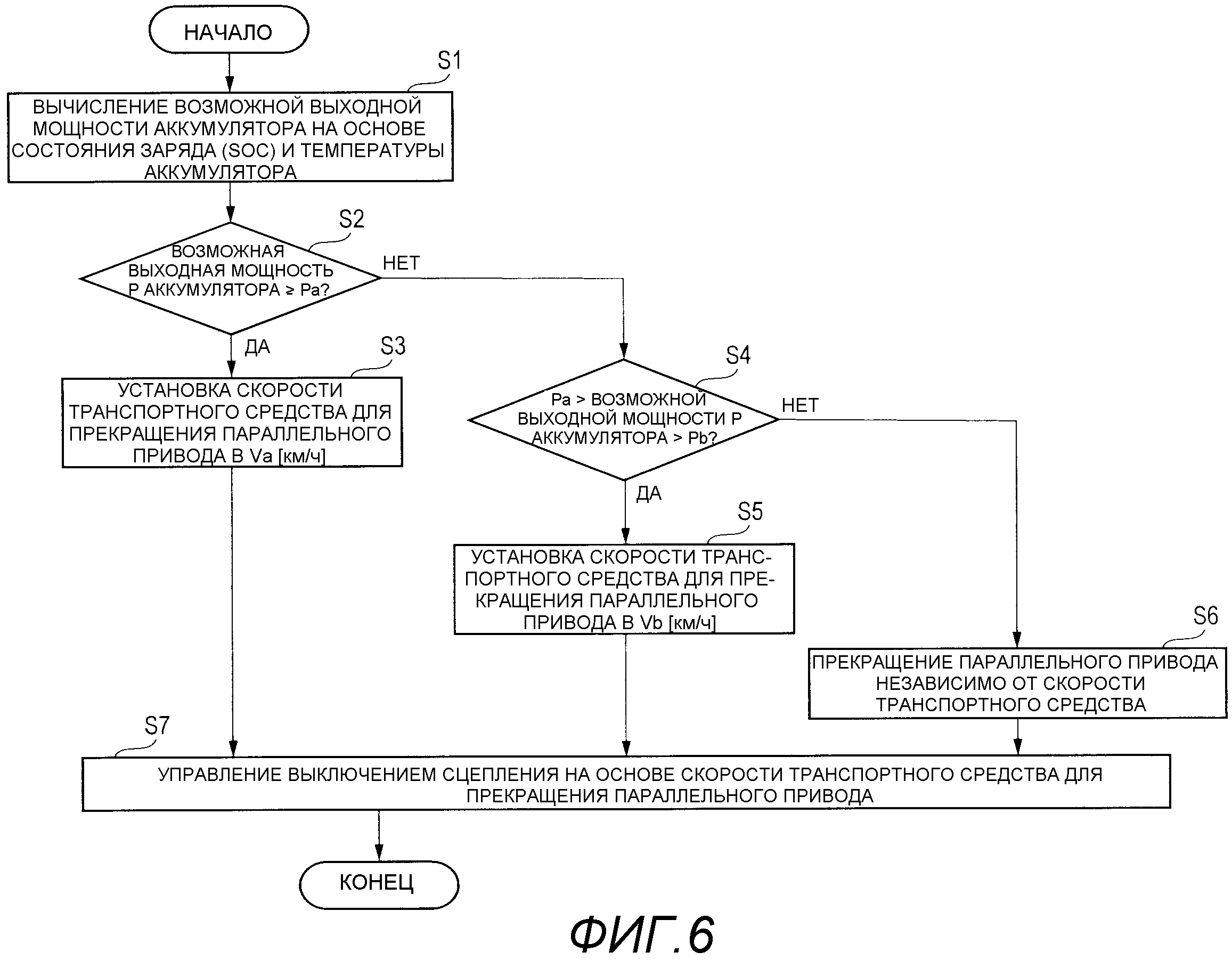
Фиг.6 - блок-схема последовательности операций, иллюстрирующая управление в устройстве управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения.
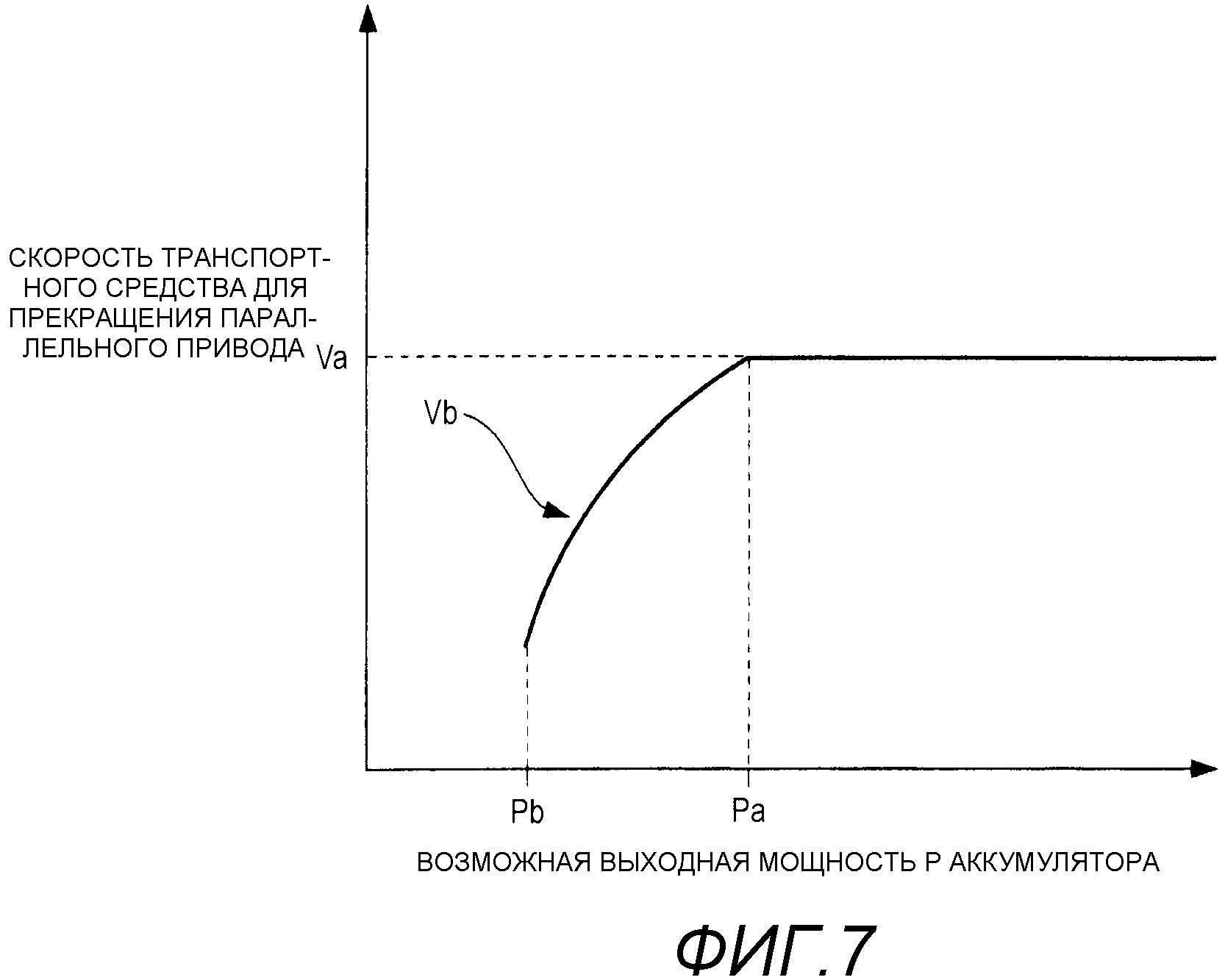
Фиг.7 - график, иллюстрирующий соотношение между возможной выходной мощностью аккумулятора и скоростью транспортного средства для прекращения параллельного привода в устройстве управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения.
Фиг.8 - схематический чертеж, иллюстрирующий EV-режим привода в гибридном транспортном средстве.
Фиг.9 - схематический чертеж, иллюстрирующий последовательный режим привода в гибридном транспортном средстве.
Фиг.10 - схематический чертеж, иллюстрирующий параллельный режим привода в гибридном транспортном средстве.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее в данном документе устройство управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения будет описано со ссылкой на фиг.1-7.
Первый примерный вариант осуществления
Фиг.1 - схема конфигурации транспортного средства, имеющего устройство управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения. Фиг.2A-7 - схемы, объясняющие управление в устройстве управления сцеплением гибридного транспортного средства согласно примерному варианту осуществления настоящего изобретения. Конкретно, фиг.2A - график управления, когда возможная выходная мощность аккумулятора равна или больше предварительно определенной выходной мощности, фиг.3A - график управления, когда возможная выходная мощность аккумулятора меньше предварительно определенной выходной мощности, фиг.4A - график управления, когда возможная выходная мощность аккумулятора равна или меньше выходной мощности определения критической ситуации, фиг.5 - блок-схема, когда вычисляется возможная выходная мощность аккумулятора, фиг.6 - блок-схема, иллюстрирующая управление вычислением, и фиг.7 - график, иллюстрирующий соотношение между возможной выходной мощностью аккумулятора и скоростью транспортного средства для прекращения параллельного привода.
В устройстве управления сцеплением гибридного транспортного средства согласно настоящему примерному варианту осуществления транспортное средство 10 - это гибридное транспортное средство, использующее двигатель 11 и электродвигатель 15 в качестве источника энергии, как показано на фиг.1. В частности, транспортное средство 10 включает в себя двигатель 11, служащий в качестве источника энергии для генерирования электричества, в то же время приводящего в движение транспортное средство, генератор 12, приводимый в действие двигателем 11, чтобы генерировать электричество, высоковольтный аккумулятор 13, накапливающий электричество, сгенерированное генератором 12, и электродвигатель 15, получающий электричество от генератора 12 и высоковольтного аккумулятора 13 через инвертер 14 и использующий, по меньшей мере, одно из электричества, сгенерированного генератором 12, и электричества, накопленного в высоковольтном аккумуляторе 13, чтобы приводить в движение транспортное средство 10.
Электродвигатель 15 приводит в движение ведущий вал передних колес 18 и соединяется с ведущим валом передних колес 18 через коробку передач (трансмиссию) 17 (в частности, через дифференциал в коробке 17 передач). Между тем, двигатель 11 также соединяется с передними колесами 18 через коробку 17 передач, но соединяется с передними колесами 18 через сцепление 16 (дополнительно, через дифференциал в коробке 17 передач), установленное в коробке 17 передач, при вращении ведущего вала передних колес 18. Сцепление 16 управляется гидравлическим регулирующим клапаном (не показан), таким как соленоид, и, в частности, зацепляет/отсоединяет вал двигателя 11 и вал (ведущий вал) электродвигателя 15 друг с/от другом(а). Поскольку сцепление 16 и коробка 17 передач могут иметь любые конфигурации, их подробное описание будет опущено в данном документе. Сцепление 16 может быть отделено от коробки 17 передач, и, дополнительно, любое сцепление мокрого типа (одно-/многодисковое) и сухого типа (одно-/многодисковое) может быть использовано в качестве сцепления 16.
В примерном варианте осуществления, в качестве примера, электродвигатель 15 устанавливается на стороне передних колес 18, но может быть дополнительно установлен электродвигатель, приводящий в движение задние колеса 19. В примерном варианте осуществления гибридное транспортное средство, в котором двигатель 11 приводится в действие и электричество генерируется генератором 12, чтобы накапливать сгенерированное электричество в высоковольтном аккумуляторе 13, приводится в качестве примера, тем не менее, может быть использовано гибридное транспортное средство со штепсельным контактом, в котором высоковольтный аккумулятор 13 может заряжаться от домашнего источника электропитания или быстродействующего зарядного устройства вне транспортного средства.
Транспортное средство 10 включает в себя электронный блок управления (ECU) 21 двигателя, управляющий двигателем 11, ECU 22 генератора, управляющий генератором 12, и EV-ECU (интегрированный в транспортное средство контроллер, блок управления) 23, управляющий высоковольтным аккумулятором 13, электродвигателем 15 и коробкой 17 передач (сцеплением 16). Высоковольтный аккумулятор 13 соединяется с EV-ECU 23 через блок управления аккумулятором (BMU) 24, управляющий высоковольтным аккумулятором 13. BMU 24 наблюдает за напряжением, током, температурой и состоянием заряда (SOC) высоковольтного аккумулятора 13 и вычисляет возможную выходную мощность аккумулятора на основе температуры и SOC, и сообщает о возможной выходной мощности аккумулятора в дополнение к напряжению, току, температуре и SOC в EV-ECU 23. Функции BMU 24 могут выполняться непосредственно посредством EV-ECU 23.
ECU 21 двигателя, ECU 22 генератора и EV-ECU 23 могут передавать и принимать информацию друг другу и друг от друга с помощью, например, локальной сети контроллеров (CAN). В устройстве управления сцеплением согласно примерному варианту осуществления EV-ECU 23 управляет сцеплением 16 в зависимости от скорости транспортного средства и требуемой движущей силы транспортного средства 10, чтобы переключать EV-привод, при котором используется аккумулятор, последовательный привод, при котором используется комбинация аккумулятора и двигателя, и параллельный привод, при котором используется двигатель, выполняя управление сцеплением, которое будет описано ниже. EV-ECU 23 обнаруживает скорость транспортного средства 10 от датчика скорости транспортного средства (не показан) и получает требуемую движущую силу на основе степени открытия акселератора, обнаруженной от педали акселератора (не показана).
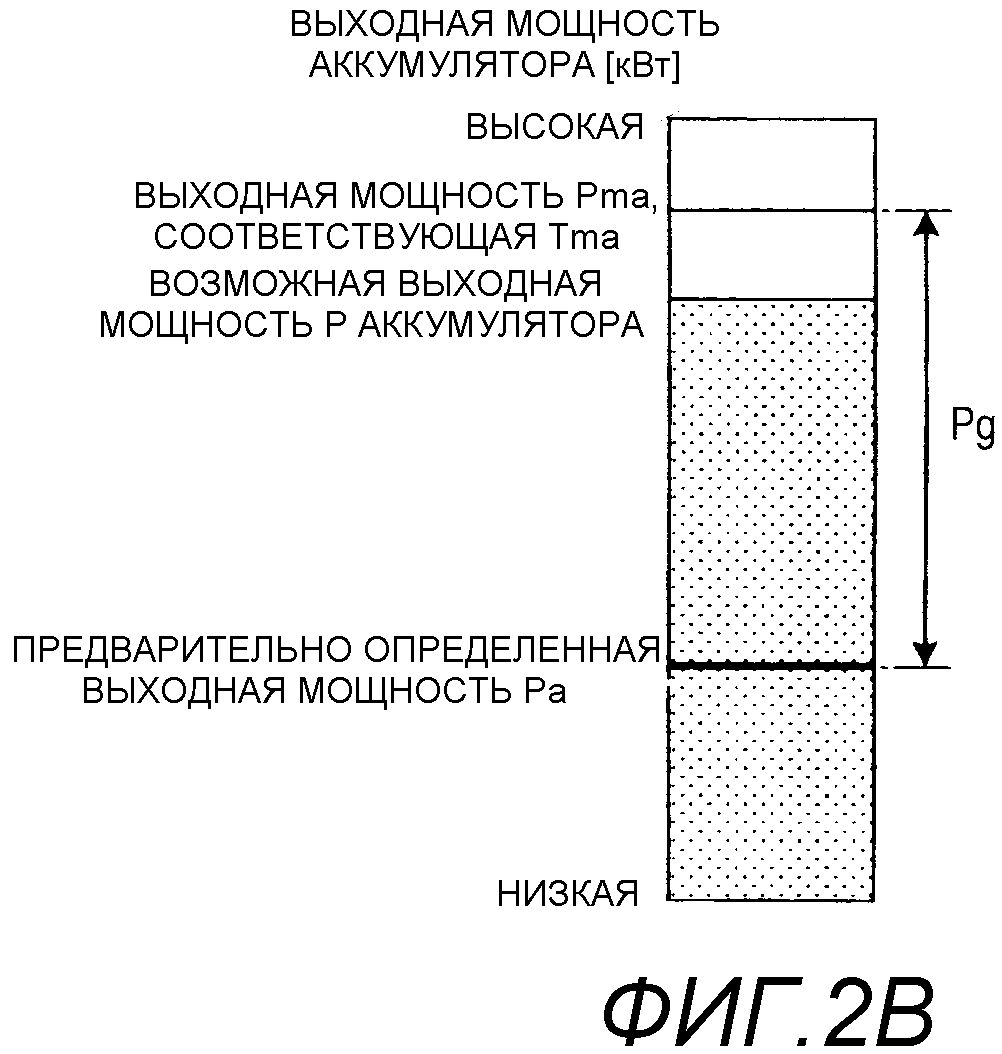
Сначала, обращаясь к фиг.2A и 2B, будет описан график управления, когда возможная выходная мощность P аккумулятора равна или больше предварительно определенной выходной мощности Pa. Подробное описание будет приведено ниже. Когда возможная выходная мощность P аккумулятора равна или больше предварительно выходной мощности Pa, возможная движущая сила электродвигателя на основе возможной выходной мощности P аккумулятора и максимальная выходная мощность Pg генерирования равна или больше максимальной движущей силы Tma электродвигателя.
Режим привода транспортного средства переключается в зависимости от скорости транспортного средства и требуемой движущей силы. Режим привода включает в себя EV-привод и последовательный привод (состояние привода от электродвигателя), в которых сцепление 16 выключено и транспортное средство приводится в движение электродвигателем 15, и параллельный привод (состояние привода от двигателя), в котором сцепление 16 включено и транспортное средство приводится в движение двигателем 11, принимая во внимание управление сцеплением 16. Скорость транспортного средства для изменения режима привода, при которой включенное состояние сцепления 16 изменяется на выключенное состояние сцепления 16, устанавливается в качестве скорости Va транспортного средства для прекращения параллельного привода, и подробное описание этого будет приведено ниже.
В случае, где возможная выходная мощность P аккумулятора равна или больше предварительно определенной выходной мощности Pa, если скорость транспортного средства меньше скорости Va транспортного средства для прекращения параллельного привода, сцепление 16 выключается и транспортное средство движется в EV-режиме привода или последовательном режиме привода. Движущая сила, требуемая для EV-привода и последовательного привода, является движущей силой от электродвигателя 15. Если скорость транспортного средства и движущая сила являются скоростью транспортного средства и движущей силой в области Rea графика возможной движущей силы T аккумулятора от выходной мощности P аккумулятора, которая может быть выведена из высоковольтного аккумулятора 13 в настоящий момент, выполняется EV-привод, а если скорость транспортного средства и движущая сила являются скоростью транспортного средства и движущей силой в области Rsa максимальной движущей силы Tma электродвигателя, которая является максимальной движущей силой, которую выводит сам электродвигатель 15, выше области Rea графика, выполняется последовательный привод.
Между тем, когда скорость транспортного средства равна или больше скорости Va транспортного средства для прекращения параллельного привода, сцепление 16 включается и транспортное средство движется в параллельном режиме привода. Движущая сила, требуемая для параллельного привода, является движущей силой от двигателя 11. Параллельный привод выполняется со скоростью транспортного средства и движущей силой в области Rpa графика максимальной движущей силы Te двигателя, которая является максимальной движущей силой, выдаваемой двигателем 11.
В данном документе возможная выходная мощность P аккумулятора будет описана со ссылкой на фиг.5. Как показано на фиг.5, первый блок B1 вычислений получает первую возможную выходную мощность P1 аккумулятора на основе SOC-значения d1, введенного в BMU 24 из графика соответствия выходной мощности аккумулятора и SOC-значения. Второй блок B2 вычислений получает вторую возможную выходную мощность P2 аккумулятора на основе значения d2 температуры аккумулятора, введенного в BMU 24 из графика соответствия выходной мощности аккумулятора и значения температуры аккумулятора. Третий блок B3 вычислений выбирает меньшую из первой возможной выходной мощности P1 аккумулятора и второй возможной выходной мощности P2 аккумулятора и устанавливает меньшую мощность в качестве возможной выходной мощности P аккумулятора. Выходная мощность аккумулятора для SOC-значения выше, когда SOC-значение выше, как видно из графика соответствия первого блока B1 вычислений. Выходная мощность аккумулятора для значения температуры аккумулятора выше, когда значение температуры аккумулятора выше, как видно из графика соответствия второго блока B2 вычислений.
Как описано выше, в BMU 24 возможная выходная мощность P аккумулятора получается из SOC и температуры высоковольтного аккумулятора 13 и после этого сообщается в EV-ECU 23. В электродвигателе 15, приводимом в действие посредством возможной выходной мощности P аккумулятора, выводимая в настоящий момент движущая сила становится возможной движущей силой T аккумулятора.
На фиг.2A максимальная движущая сила Tma электродвигателя является максимальной движущей силой, которую выводит сам электродвигатель 15. Когда скорость транспортного средства низкая, движущая сила может выводиться с помощью возможной выходной мощности P аккумулятора, а когда скорость транспортного средства средняя, движущая сила может выводиться с помощью возможной выводимой мощности P аккумулятора и генерируемого электричества, выводимого от генератора 12. Когда максимальная выходная мощность, сгенерированная генератором 12, устанавливается в максимальную выходную мощность Pg генерирования электричества, предварительно определенная выходная мощность Pa может быть определена как выражение Pa=Pma-Pg посредством выходной мощности Pma, соответствующей максимальной движущей силе Tma электродвигателя и максимальной выходной мощности Pg генерирования электричества. Соответственно, как показано на столбчатой диаграмме на фиг.2B, когда возможная выходная мощность P аккумулятора равна или больше предварительно определенной выходной мощности Pa, EV-привод и последовательный привод могут выполняться с максимальной движущей силой Tma электродвигателя посредством добавления выходной мощности генерирования электричества (сгенерированной энергии, которая равна или меньше максимальной выходной мощности Pg генерирования электричества) от генератора.
Максимальная движущая сила Tma электродвигателя получается соответствующей скорости транспортного средства, максимальная движущая сила Te двигателя, выводимая двигателем 11, получается соответствующей скорости транспортного средства, а скорость Va транспортного средства для прекращения параллельного привода устанавливается как удовлетворяющая выражению |Tma-Te|≤ΔT, где ΔT - это предварительно определенная разность движущей силы для предотвращения возникновения резкого изменения крутящего момента. Т.е., обращаясь к фиг.2A, скорость транспортного средства поблизости от точки пересечения выходной кривой максимальной движущей силы Tma электродвигателя и выходной кривой максимальной движущей силы Te двигателя устанавливается в качестве скорости Va транспортного средства для прекращения параллельного привода.
В случае, где параллельный привод переключается на последовательный привод или EV-привод, если сцепление 16 выключается при скорости транспортного средства, отличной от скорости Va транспортного средства для прекращения параллельного привода, изменение в движущей силе является большим, и возникает резкое изменение крутящего момента, как очевидно из фиг.2A.
Между тем, когда возможная выходная мощность P аккумулятора равна или больше предварительно определенной выходной мощности Pa, т.е. возможная движущая сила электродвигателя равна или больше максимальной движущей силы Tma электродвигателя, используется скорость Va транспортного средства для прекращения параллельного привода, и когда параллельный привод переключается на последовательный привод или EV-привод, если скорость транспортного средства равна скорости Va транспортного средства для прекращения параллельного привода, сцепление 16 выключается, и, как результат, посредством выключения сцепления 16 изменение в движущей силе является небольшим, и резкое изменение крутящего момента уменьшается, даже если движущая сила смещается от двигателя 11 к электродвигателю 15.
Соотношение между возможной выходной мощностью аккумулятора и скоростью транспортного средства для прекращения параллельного привода в случаях на фиг.2A и 2B, также как и на фиг.3A-4B, которые будут описаны ниже, является графиком, показанным на фиг.7. Поскольку скорость Va транспортного средства для прекращения параллельного привода определяется посредством максимальной движущей силы Tma электродвигателя, когда возможная выходная мощность P аккумулятора равна или больше предварительно определенной выходной мощности Pa, скорость Va транспортного средства для прекращения параллельного привода становится предварительно определенным значением и, например, устанавливается в любое значение в диапазоне от 80 до 100 км/ч.
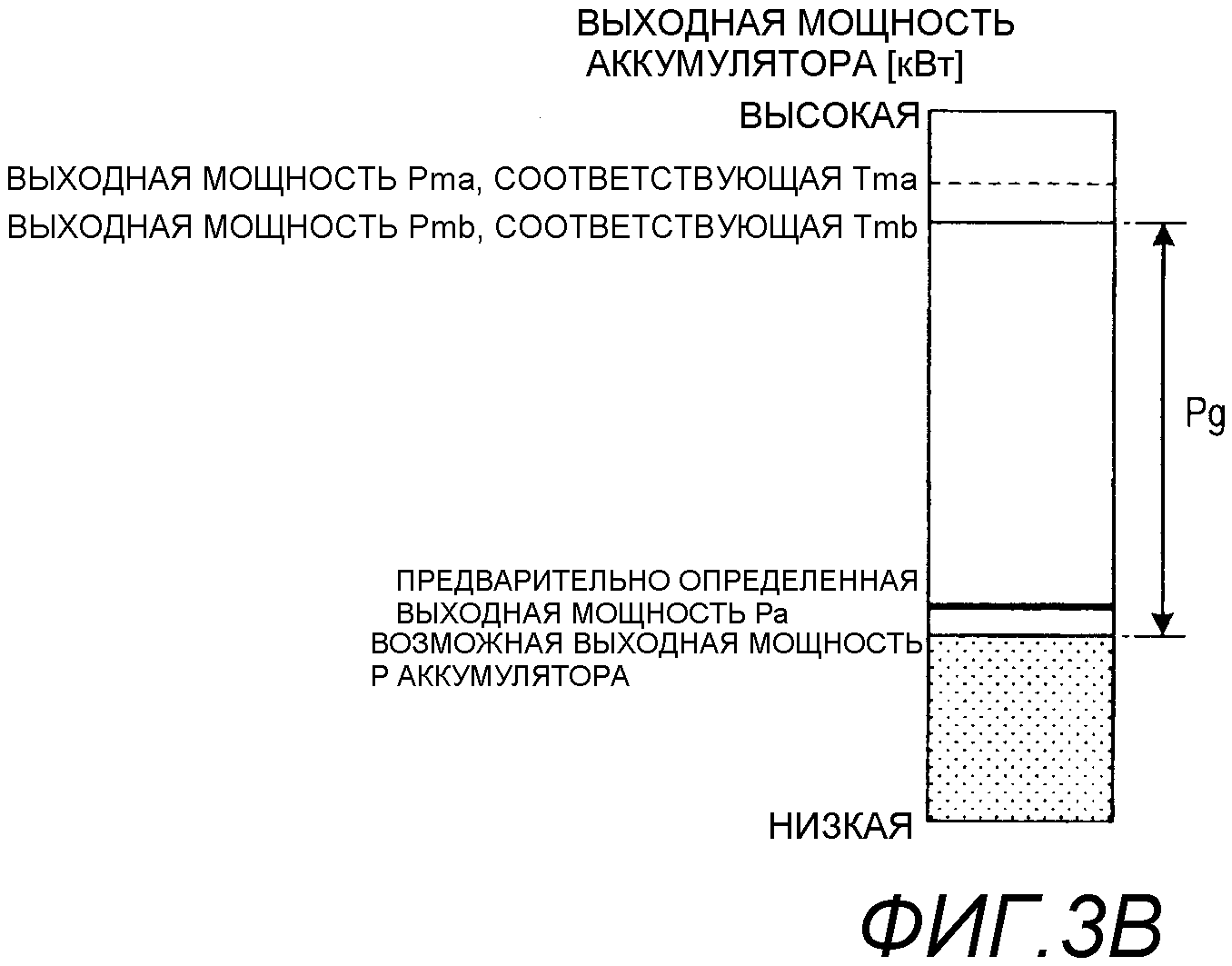
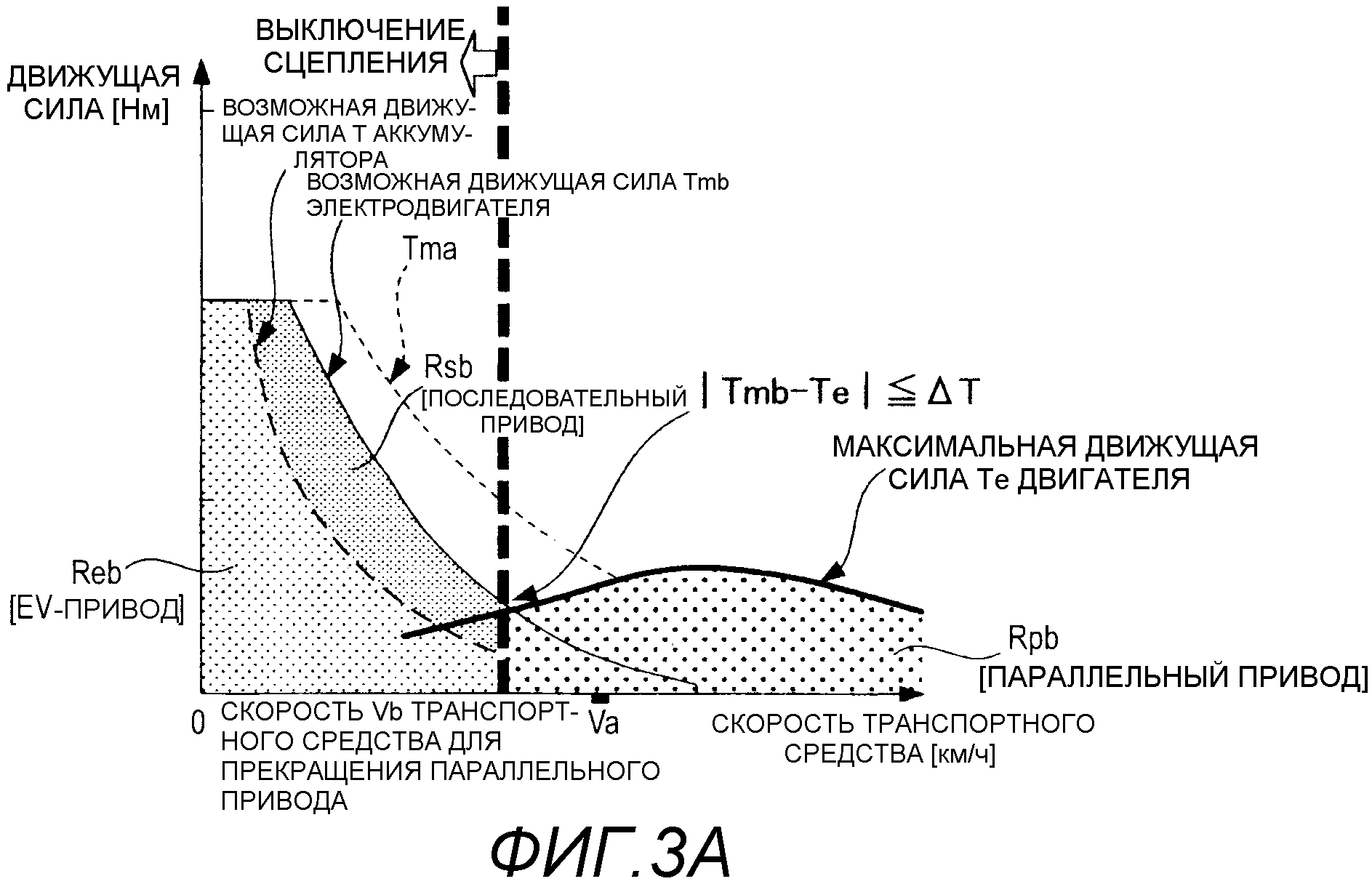
Далее, обращаясь к фиг.3A и 3B, будет описан график управления, когда возможная выходная мощность P аккумулятора меньше предварительно определенной выходной мощности Pa (однако, равна или больше, чем выходная мощность Pb при определении критической ситуации, которая будет описана ниже). Когда возможная выходная мощность P аккумулятора меньше предварительно определенной выходной мощности Pa, возможная движущая сила Tmb электродвигателя, основанная на возможной выходной мощности P аккумулятора и максимальной выходной мощности Pg генерирования электричества, меньше, чем максимальная движущая сила Tma электродвигателя.
Переключение режима привода транспортного средства 10 в основном является таким же, что и тогда, когда возможная выходная мощность P аккумулятора равна или больше предварительно определенной выходной мощности Pa, однако, как описано ниже в данном документе, скорость транспортного средства для изменения режима привода, при котором включенное состояние сцепления 16 изменяется на выключенное состояние сцепления 16, устанавливается в качестве скорости Vb транспортного средства для прекращения параллельного привода.
Когда возможная выходная мощность P аккумулятора меньше предварительно определенной выходной мощности Pa, если скорость транспортного средства меньше, чем скорость Vb транспортного средства для прекращения параллельного привода, сцепление 16 выключается и транспортное средство движется в EV-режиме привода или последовательном режиме привода. Движущая сила, требуемая для EV-привода и последовательного привода, является движущей силой от электродвигателя 15. Если скорость транспортного средства и движущая сила являются скоростью транспортного средства и движущей силой в области Reb графика возможной движущей силы T аккумулятора от возможной выходной мощности P аккумулятора, которая может быть выведена из высоковольтного аккумулятора 13 в настоящий момент, выполняется EV-привод, а если скорость транспортного средства и движущая сила являются скоростью транспортного средства и движущей силой в области Rsb возможной движущей силы Tmb электродвигателя, которую электродвигатель 15 может выводить в настоящий момент, выше области Reb графика, выполняется последовательный привод.
Между тем, когда скорость транспортного средства равна или больше скорости Vb транспортного средства для прекращения параллельного привода, сцепление 16 включается и транспортное средство движется в параллельном режиме привода. Движущая сила, требуемая для параллельного привода, является движущей силой от двигателя 11, и параллельный привод выполняется со скоростью транспортного средства и движущей силой в области Rpb графика максимальной движущей силы Te двигателя от двигателя 11.
Как описано выше, случай, когда возможная выходная мощность P аккумулятора меньше, чем предварительно определенная выходная мощность Pa, выглядит так же, что и случай, когда возможная выходная мощность P аккумулятора равна или больше предварительно определенной выходной мощности Pa, однако, они отличаются друг от друга в некоторых точках по следующим причинам.
Как показано на фиг.3B, когда возможная выходная мощность P аккумулятора меньше предварительно определенной выходной мощности Pa, выходная мощность Pmb, соответствующая возможной движущей силе Tmb электродвигателя, не достигает выходной мощности Pma, соответствующей максимальной движущей силе Tma электродвигателя, даже посредством добавления максимальной выходной мощности Pg генерирования электричества.
Например, на фиг.3A, в качестве возможной движущей силы Tmb электродвигателя, которую электродвигатель 15 может вывести в настоящий момент, когда скорость транспортного средства низкая, максимальная движущая сила Tma электродвигателя может выводиться с помощью возможной выходной мощности P аккумулятора или возможной выходной мощности P аккумулятора и выходной мощности генерирования электричества от генератора 12, однако, когда скорость транспортного средства средняя, максимальная движущая сила Tma электродвигателя не может выводиться даже с помощью возможной выходной мощности P аккумулятора и максимальной выходной мощности Pg генерирования электричества.
В результате, область Rsb возможной движущей силы Tmb электродвигателя, показанная на фиг.3A, меньше, чем область Rsa, показанная на фиг.2A, и область Rpb становится больше на эту величину. Поскольку возможная выходная мощность P аккумулятора уменьшается, даже область Reb возможной движущей силы T аккумулятора, показанная на фиг.3A, естественно, является меньшей, чем область Rea, показанная на фиг.2A.
В данном документе возможная движущая сила Tmb электродвигателя получается соответствующей скорости транспортного средства на основе возможной выходной мощности P аккумулятора и максимальной выходной мощности Pg генерирования электричества, а скорость Vb транспортного средства для прекращения параллельного привода устанавливается как удовлетворяющая выражению |Tmb-Te|≤ΔT с помощью максимальной движущей силы Te двигателя, полученной соответствующей скорости транспортного средства и предварительно определенной разности ΔT движущей силы для предотвращения возникновения резкого изменения крутящего момента. Т.е., обращаясь к фиг.3A, скорость транспортного средства поблизости от точки пересечения выходной кривой возможной движущей силы Tmb электродвигателя и выходной кривой максимальной движущей силы Te двигателя устанавливается в качестве скорости Vb транспортного средства для прекращения параллельного привода. В диапазоне скорости транспортного средства, в котором сцепление 16 включается/выключается, удовлетворяется выражение Tma>Tmb, и, как результат, скорость Vb транспортного средства для прекращения параллельного привода является меньшей, чем скорость Va транспортного средства для прекращения параллельного привода, и скорость Vb транспортного средства для прекращения параллельного привода сдвигается от скорости Va транспортного средства для прекращения параллельного привода в сторону низкой скорости транспортного средства.
Как описано выше, когда возможная выходная мощность P аккумулятора меньше предварительно определенной выходной мощности Pa, скорость транспортного средства, при которой разница между возможной движущей силой Tmb электродвигателя и максимальной движущей силой Te двигателя равна или меньше предварительно определенной разности ΔT движущей силы, устанавливается как скорость Vb транспортного средства для прекращения параллельного привода. Между тем, когда возможная выходная мощность P аккумулятора, описанная выше, равна или больше, чем предварительно определенная выходная мощность Pa, скорость транспортного средства, при которой максимальная движущая сила Tma электродвигателя используется вместо возможной движущей силы электродвигателя, и разница между максимальной движущей силой Tma электродвигателя и максимальной движущей силой Te двигателя равна или меньше предварительно определенной разности ΔT движущей силы, устанавливается в качестве скорости Va транспортного средства для прекращения параллельного привода.
Когда параллельный привод переключается на последовательный привод или EV-привод, если сцепление 16 выключается при скорости транспортного средства, отличной от скорости Vb транспортного средства для прекращения параллельного привода, например, когда сцепление 16 выключается при скорости Va транспортного средства, разница движущей силы между возможной движущей силой Tmb электродвигателя и максимальной движущей силой Te двигателя является большой, как очевидно из фиг.3A, и, как результат, возникает резкое изменение крутящего момента.
Между тем, когда возможная выходная мощность P аккумулятора меньше предварительно определенной выходной мощности Pa, т.е. возможная движущая сила Tmb электродвигателя меньше максимальной движущей силы Tma электродвигателя, используется скорость Vb транспортного средства для прекращения параллельного привода, и когда параллельный привод переключается на последовательный привод или EV-привод, если скорость транспортного средства равна скорости Vb транспортного средства для прекращения параллельного привода, сцепление 16 выключается, и, как результат, посредством выключения сцепления 16 изменение в движущей силе является небольшим, и резкое изменение крутящего момента уменьшается, даже если движущая сила смещается от двигателя 11 к электродвигателю 15.
В данном документе, поскольку возможная движущая сила Tmb электродвигателя изменяется в зависимости от возможной выходной мощности P аккумулятора, скорость Vb для прекращения параллельного привода изменяется в зависимости от возможной выходной мощности P аккумулятора и устанавливается, например, в диапазоне 50-80 км/ч, как показано на фиг.7.
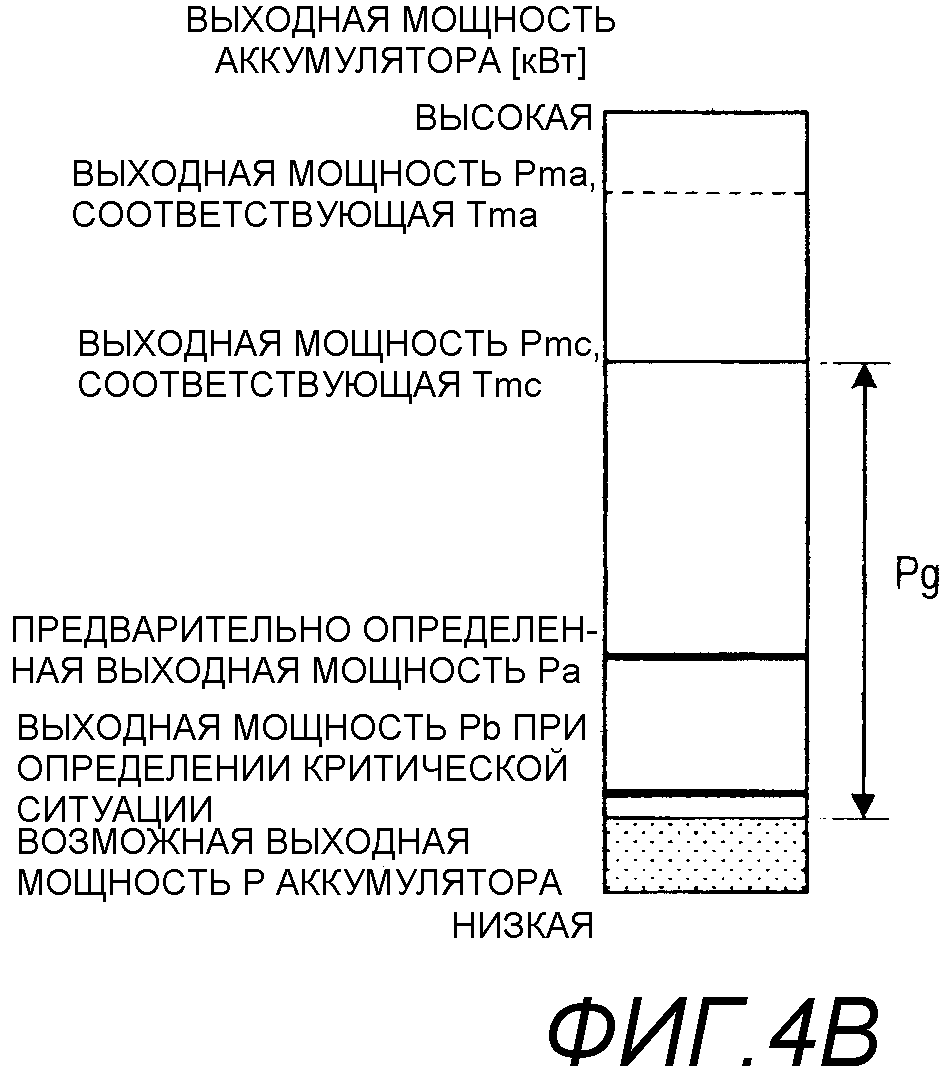
Далее, обращаясь к фиг.4A и 4B, будет описан график управления, когда возможная выходная мощность P аккумулятора равна или меньше выходной мощности Pb при определении критической ситуации. Выходная мощность Pb при определении критической ситуации - это выходная мощность аккумулятора при определении предыдущего этапа переразряда аккумулятора (разряда ячеек).
Когда возможная выходная мощность P аккумулятора равна или меньше выходной мощности Pb при определении критической ситуации, режим привода транспортного средства 10 переключается в зависимости от скорости транспортного средства и требуемой движущей силы, однако, в полном диапазоне скорости транспортного средства, сцепление 16 предохраняется от включения, а когда сцепление 16 находится во включенном состоянии, сцепление 16 выключается. Т.е. параллельный привод не используется и переключается на EV-привод или последовательный привод в зависимости от скорости транспортного средства и требуемой движущей силы.
Как описано выше, когда возможная выходная мощность P аккумулятора равна или меньше выходной мощности Pb при определении критической ситуации, сцепление 16 выключается независимо от скорости транспортного средства и транспортное средство движется в режиме EV-привода или последовательного привода. Движущая сила, требуемая для EV-привода и последовательного привода, является движущей силой от электродвигателя 15. Если скорость транспортного средства и движущая сила являются скоростью транспортного средства и движущей силой в области Rec графика возможной движущей силы T аккумулятора от возможной выходной мощности P аккумулятора, которая может быть выведена из высоковольтного аккумулятора 13 в настоящий момент, выполняется EV-привод, а если скорость транспортного средства и движущая сила являются скоростью транспортного средства и движущей силой в области Rsc возможной движущей силы Tmc электродвигателя, которую электродвигатель 15 может выводить в настоящий момент, выше области Rec графика, выполняется последовательный привод.
Как показано на фиг.4B, когда возможная выходная мощность P аккумулятора равна или меньше выходной мощности Pb при определении критической ситуации, выходная мощность Pmc, соответствующая возможной движущей силе Tmc электродвигателя, не достигает выходной мощности Pma, соответствующей максимальной движущей силе Tma электродвигателя, даже посредством добавления максимальной выходной мощности Pg генерирования электричества.
Например, на фиг.4A в качестве возможной движущей силы Tmc электродвигателя, которую электродвигатель 15 может вывести в настоящий момент, когда скорость транспортного средства низкая, максимальная движущая сила Tma электродвигателя может выводиться с помощью возможной выходной мощности P аккумулятора и выходной мощности генерирования электричества от генератора 12, однако, когда скорость транспортного средства средняя, максимальная движущая сила Tma электродвигателя не может выводиться даже с помощью возможной выходной мощности P аккумулятора и максимальной выходной мощности Pg генерирования электричества.
Как результат, область Rsc возможной движущей силы Tmc электродвигателя, показанная на фиг.4A, меньше, чем область Rsa, показанная на фиг.2A, и область Rsb, показанная на фиг.3A. Поскольку возможная выходная мощность P аккумулятора уменьшается, даже область Rec возможной движущей силы T аккумулятора, показанная на фиг.4A, естественно меньше, чем область Rea, показанная на фиг.2A, и область Reb, показанная на фиг.3A. Когда EV-привод продолжается в течение длительного времени, выходная мощность аккумулятора, минимально требуемая для электродвигателя 15, может не обеспечиваться, и, как результат, область Rec, т.е. диапазоны скорости транспортного средства и движущей силы, значительно ограничивается.
Следовательно, когда возможная выходная мощность P аккумулятора равна или меньше выходной мощности Pb при определении критической ситуации, не допускается включение сцепления 16 в полном диапазоне скоростей транспортного средства, и, дополнительно, когда сцепление 16 включено, сцепление 16 немедленно выключается, и предотвращается использование параллельного привода, таким образом предохраняя высоковольтный аккумулятор 13 от переразряда. В результате, в данном документе, аналогично скорости Va транспортного средства для прекращения параллельного привода, показанной на фиг.2A, и скорости Vb транспортного средства для прекращения параллельного привода, показанной на фиг.3A, нет необходимости устанавливать скорость транспортного средства для прекращения параллельного привода.
В заключение, со ссылкой на блок-схему последовательности операций, показанную на фиг.6, будет описана серия последовательных действий, ассоциированных с управлением, описанным выше.
(Этап S1)
Возможная выходная мощность P аккумулятора вычисляется на основе SOC и температуры аккумулятора. В частности, как описано на фиг.5, наименьшая мощность между первой возможной выходной мощностью P1 аккумулятора для SOC-значения d1 и второй возможной выходной мощности P2 аккумулятора для значения d2 температуры аккумулятора устанавливается в качестве возможной выходной мощности P аккумулятора.
(Этап S2)
В то время как возможная выходная мощность P аккумулятора отслеживается посредством EV-ECU 23, вычисленная возможная выходная мощность P аккумулятора сравнивается с предварительно определенной выходной мощностью Pa, и если удовлетворяется условие P≥Pa, процесс переходит к этапу S3, а если условие P≥Pa не удовлетворяется, процесс переходит к этапу S4.
(Этап S3)
Если условие P≥Pa удовлетворяется, скорость транспортного средства для прекращения параллельного привода устанавливается как скорость Va транспортного средства для прекращения привода, и процесс переходит к этапу S7. В качестве скорости Va транспортного средства для прекращения параллельного привода устанавливается скорость транспортного средства, которая удовлетворяет выражению |Tma-Te|≤ΔT, как описано выше.
(Этап S4)
Если условие P≥Pa не удовлетворяется, вычисленная возможная выходная мощность P аккумулятора сравнивается с предварительно определенной выходной мощностью Pa и выходной мощностью Pb при определении критической ситуации (Pa>Pb), и если условие Pa>P>Pb удовлетворяется, процесс переходит к этапу S5, а если условие Pa>P>Pb не удовлетворяется, процесс переходит к этапу S6.
(Этап S5)
Если условие Pa>P>Pb удовлетворяется, скорость транспортного средства для прекращения параллельного привода устанавливается как скорость Vb транспортного средства для прекращения параллельного привода, и процесс переходит к этапу S7. В качестве скорости Vb для прекращения параллельного привода устанавливается скорость транспортного средства, которая удовлетворяет выражению |Tmb-Te|≤ΔT, как описано выше.
(Этап S6)
Если условие Pa>P>Pb не удовлетворяется, условие Pb≥P удовлетворяется, и в таком случае настройка для прекращения параллельного привода устанавливается независимо от скорости транспортного средства, и процесс переходит к этапу S7.
(Этап S7)
Если условие P≥Pa удовлетворяется, выполняется управление выключением сцепления на основе скорости Va транспортного средства для прекращения параллельного привода. В частности, когда параллельный привод переключается на последовательный привод или EV-привод, если скорость транспортного средства становится скоростью Va транспортного средства для прекращения параллельного привода, выполняется управление изменением включенного состояния сцепления 16 в выключенное состояние сцепления 16. Если условие Pa>P≥Pb удовлетворяется, управление выключением сцепления выполняется на основе скорости Vb транспортного средства для прекращения параллельного привода. В частности, когда параллельный привод переключается на последовательный привод или EV-привод, если скорость транспортного средства становится скоростью Vb транспортного средства для прекращения параллельного привода, выполняется управление изменением включенного состояния сцепления 16 в выключенное состояние сцепления 16. Между тем, если условие Pb≥P удовлетворяется, параллельный привод прекращается независимо от скорости транспортного средства. Если сцепление 16 включено, сцепление 16 немедленно выключается. Если сцепление 16 выключено, не допускается включение сцепления 16.
Как описано выше, поскольку скорость транспортного средства для прекращения параллельного привода, чтобы выключить сцепление 16, устанавливается согласно возможной выходной мощности P аккумулятора, которая может быть выведена из высоковольтного аккумулятора 13, изменение в движущей силе невелико, и резкое изменение крутящего момента уменьшается даже посредством выключения сцепления 16, когда параллельный привод переключается на последовательный привод или EV-привод.
Согласно аспекту настоящего изобретения, поскольку скорость транспортного средства для изменения режима привода, при которой состояние привода от двигателя переключается на состояние привода от электродвигателя, устанавливается в зависимости от возможной выходной мощности аккумулятора, резкое изменение крутящего момента может быть предотвращено при переключении режима из состояния привода от двигателя в состояние привода от электродвигателя.
Настоящее изобретение подходит для гибридного транспортного средства.
Конструкция кузова транспортного средства
Система подачи топлива для двигателя внутреннего сгорания
Устройство регулируемых клапанов для двигателя внутреннего сгорания
Транспортное средство с приводом на передние и задние колеса
Приводное устройство регулируемых клапанов для двигателя внутреннего сгорания
Двигатель с регулируемым клапанным механизмом
Система охлаждения
Конструкция корпуса передней части транспортного средства
Устройство управления прогревом для транспортного средства
Регулируемое клапанное устройство для двигателя внутреннего сгорания
Устройство управления электродвигателем для электрического транспортного средства
Конструкция кузова транспортного средства
Система подачи топлива для двигателя внутреннего сгорания
Устройство регулируемых клапанов для двигателя внутреннего сгорания
Транспортное средство с приводом на передние и задние колеса
Приводное устройство регулируемых клапанов для двигателя внутреннего сгорания
Двигатель с регулируемым клапанным механизмом
Система охлаждения
Конструкция корпуса передней части транспортного средства
Устройство управления прогревом для транспортного средства

