Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ОТНОСИТЕЛЬНО ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области навигации и может быть использовано для определения координат подвижных объектов.
Известен способ определения положения объекта относительно источника электромагнитного поля (интерферометрический способ), принятый в качестве аналога, включающий прием на измеряющем объекте сигналов электромагнитного поля в двух точках пространства на известной базе, сравнение и выделение сигналов отображений объекта каждой антенной, измерение амплитуды и периода принимаемых сигналов, определение фазовых сдвигов выделенных сигналов в точках измерений экстремальных значений и вычисление по полученным данным положения объекта-передатчика, используя размер базы как опорный параметр.
Основным недостатком интерферометрического способа является использование трансцендентных функций при представлении напряжения комплексным числом, которые имеют разрывы в особых точках. Из-за сложности и слабой формализуемости решаемых задач это приводит при обработке информации к использованию многочисленных эмпирических алгоритмов и методов.
Известен также способ определения положения объекта относительно источника электромагнитного поля, выбранный в качестве прототипа, включающий прием на объекте сигналов электромагнитного поля источника двумя параллельными дипольными антеннами, расположенными на расстоянии - базе, определение разности фаз и их распределения между принятыми сигналами, путем измерения времени между тремя последовательными экстремальными значениями принимаемых сигналов и времени прохождения вспомогательного электромагнитного сигнала между антеннами, и определение по оценкам времен отстояния объекта от источника.
Известен также радиоприемник для определения положения объекта относительно источника электромагнитного поля, выбранный в качестве прототипа, содержащий антенное устройство в виде двух параллельных, дипольных антенн, установленных на расстоянии (базе), между которыми размещен измеритель расстояния между ними, блок управления, измерительный блок, блок определения положения объекта относительно передатчика электромагнитного поля и регистратор, при этом антенное устройство и измеритель расстояния между антеннами через блок управления подключены к измерительному блоку, выход которого соединен с блоком определения положения объекта относительно источника, выход которого подключен к регистратору.
Основным недостатком прототипов способа и реализующего его устройства является измерение магнитной составляющей электромагнитного поля, что ограничивает, а иногда и исключает, возможность их использования, а также ограничения в быстродействии.
Целью заявляемого изобретения является расширение возможностей и упрощение способа и реализующего его устройства определения положения объекта относительно источника электромагнитного поля.
Указанная цель достигается тем, что в известном способе определения положения объекта относительно источника электромагнитного поля, включающем прием на объекте сигналов электромагнитного поля источника двумя параллельными дипольными антеннами, расположенными на расстоянии - базе, определение разности фаз и их распределения между принятыми сигналами, путем измерения времени между тремя последовательными экстремальными значениями принимаемых сигналов и времени прохождения вспомогательного электромагнитного сигнала между антеннами, и определение по оценкам времен отстояния объекта от источника, при этом время прохождения вспомогательного сигнала используют для создания временной развертки, служащей осью системы координат, совпадающей с направлением базы, проектируют принимаемые сигналы от передатчика на эту развертку, а в качестве точек экстремальных значений используют центры протяженности площадок этих значений и определяют положение источника в плоскостной ортогональной системе координат, построенной на базе и плоскости, проходящей через базу и источник, в которой лежит вторая ось системы.
Указанная цель достигается также тем, что радиоприемник для осуществления способа по п.1 содержит антенное устройство в виде двух параллельных, дипольных антенн, установленных на расстоянии (базе), между которыми размещен измеритель расстояния между ними, блок управления, измерительный блок, блок определения положения объекта относительно источника электромагнитного поля и регистратор, при этом антенное устройство и измеритель расстояния между антеннами через блок управления подключены к измерительному блоку, выход которого соединен с входом блока определения положения объекта относительно источника, выход которого подключен к регистратору, а антенное устройство подключается к измерительному блоку через коммутаторы, соединенные с блоком управления, блок управления включает опорный генератор и устройство линейной развертки, выход которой подключен к измерительному блоку, а в блок определения положения объекта относительно источника электромагнитного поля входит устройство определения протяженности амплитудных уровней сигналов.
Пример выполнения заявляемого изобретения.
На фиг.1 показан способ определения расстояния от объекта до источника электромагнитного поля.
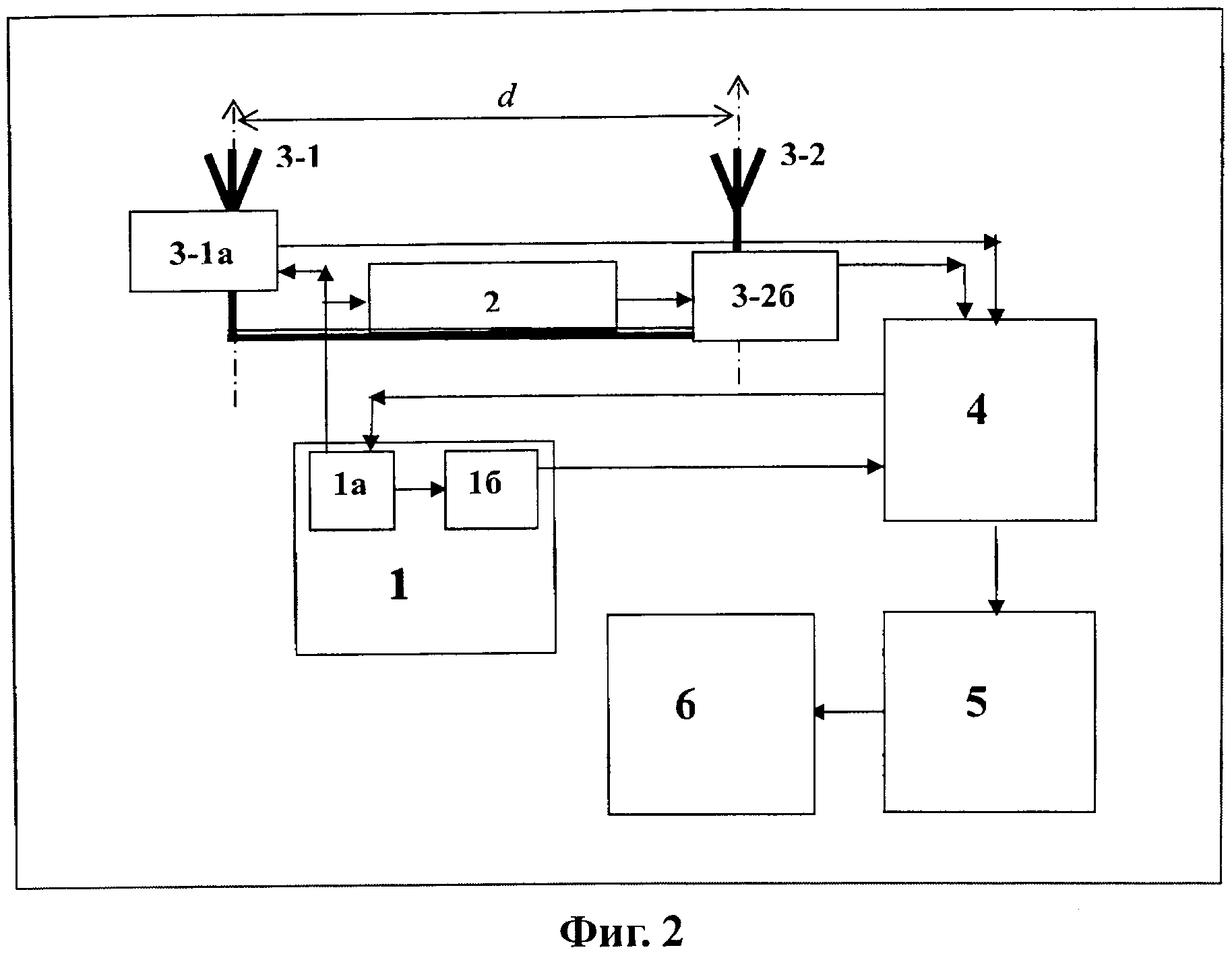
На фиг.2 приведена структурная блок схема заявленного приемного устройства.
Источник электромагнитного поля может быть неподвижным, установленным на берегу, либо подвижным, установленным на двигающейся платформе. Источник электромагнитного поля может быть активным - передатчиком, либо источником отраженного излучения, задаваемого другим излучающим устройством.
Заявленный способ реализуется приемным устройством, структурная блок-схема которого показана на фиг.2. Приемное устройство содержит блок управления 1, включающий опорный генератор 1а и устройство развертки измеряемых сигналов 1б; измеритель расстояния между антеннами 2; антенное устройство 3, содержащее две антенны 3-1 и 3-2 с коммутаторами 3-1а и 3-2б, разнесенными на постоянном расстоянии - базе d; измерительный блок 4; блок определения положения приемного устройства относительно источника 5; регистратор 6.
Блок управления 1 содержит опорный генератор 1а, выход которого подключен к устройству развертки измеряемых сигналов 1б. На вход опорного генератора 1а подключен выход с измерительного блока 4.
Опорный генератор 1а задает опорную частоту (нормированную скважность Δ) с импульсом цикла измерений. В качестве опорного генератора должен быть выбран генератор электромагнитного поля, имеющий частоту (длину волны), удовлетворяющую одному, наиболее жесткому, из двух условий: не менее чем на 3 порядка большую частоты источника электромагнитного поля и длину волны не менее чем на 3 порядка меньшую базы d. Цикл измерений устанавливают в соответствии со скоростями движений носителей приемного устройства (самолета, судна и др.) и источника (самолета, судна и др.). Генератор 1а требований к стабильности опорной частоты не имеет.
Выход с опорного генератора 1а связан с измерителем расстояния между антеннами 2 и коммутатором 3а. Выход устройства развертки измеряемых сигналов 1б подключен к измерительному блоку 4.
Измеритель расстояния между антеннами 2 размещают ортогонально направлению антенн 3-1 и 3-2. Измеритель 2 может быть выполнен в виде прямолинейного проводника, длинной линии, лазерного измерителя расстояний и других устройств. На его вход подключен выход блока управления 1, а его выход подключен к коммутатору 3-2б.
Коммутатор 3-1а подключает антенну 3-1 к входу измерительного блока 4. Коммутатор 3-2б подключает антенну 3-2 ко второму входу измерительного блока 4. В качестве антенн 3-1 и 3-2 могут быть использованы штыревые антенны.
К входам измерительного блока 4 подключены выходы антенн 3-1 и 3-2 через коммутаторы 3-1а и 3-2б. Кроме того, к нему подключен выход устройства развертки измеряемых сигналов 1б. Измерительный блок 4 имеет два выхода: первый подключен к блоку управления 1, отмечая окончание цикла измерений, второй - к блоку определения положения приемного устройства относительно источника 5, выход которого соединен с регистратором 6.
Блок определения положения приемного устройства относительно источника 5 является вычислителем. В его состав входит устройство определения протяженности амплитудных уровней сигналов.
Измерительный блок 4 и блок определения положения приемного устройства относительно источника 5 могут быть выполнены на основе микропроцессоров, например семейства AVR фирмы АТМЕС.
Радиоприемник работает следующим образом.
В блоке управления 1 опорный генератор 1а задает опорную частоту, из которой формирует импульсы нормированной скважности Δ, и импульс начала цикла измерений, которые поступают на устройство развертки измеряемых сигналов 1б. Устройство 1б формирует линейную развертку суммированием импульсов нормированной скважности Δ, выход которой поступает на измерительный блок 4, задавая напряжение линейной развертки Up, которое нормировано импульсами скважности Δ. Напряжение линейной развертки Up задает в пространстве ось системы координат, совпадающую с направлением базы d.
Импульс цикла измерений поступает на измеритель расстояния между антеннами 2 и на коммутатор 3-1а, который подключает антенну 3-1 к приемному блоку 4. Импульс цикла, прошедший по измерителю 2, запускает коммутатор 3б, который подключает антенну 3-2 ко второму каналу измерительного блока 4.
В общем случае, сигналы с антенн 3а и 3б имеют чисто синусоидальную форму, которые проектируются на оси независимых систем координат, например Xа и Xб, направленных произвольно. Но сигналы, снимаемые с антенн 3а и 3б, проектируются в момент измерений на общую ось Г, заданную напряжением линейной развертки Up, что приводит к смещению положения их экстремальных значений. Для оценки разности фаз принятых сигналов необходимо иметь три последовательных экстремальных значения с каждой из антенн (прототип).
В измерительный блок 4 поступают от источника поля два сигнала, начало которых сдвинуто в пространстве на размер базы - d. В результате на линейной развертке располагают два сигнала от источника поля, сдвинутые в пространстве на размер базы d, а по времени на отрезок, равный d/C, где C - скорость света. После прихода третьего экстремального значения сигнала (максимального и минимального), пришедшего с антенны 3б, измерительный блок 4 выдает импульс конца цикла измерений, поступающий в блок управления 1, который прерывает поступление импульсов нормированной скважности Δ в блоки 1б, 2 и 3а.
Одновременно измерительный блок 4 формирует группу измеряемых сигналов, состоящий из спроектированных на ось линейной развертки Г принимаемых сигналов, поступивших из антенн 3а и 3б, разделенных базой d, которые поступают в блок определения положения приемного устройства относительно источника 5.
После этого, в соответствии с заданным циклом измерений, блок 1 выдает следующий импульс начала измерений.
В блоке 5 определения расстояния от объекта до передатчика выделяют с нормированной скважностью Δ моменты времени трех последовательных экстремальных значений амплитуд двух сигналов.
При этом в качестве точек экстремальных значений амплитуд используют центры протяженности площадок этих значений. Это позволяет даже при недостаточной чувствительности измерителя напряжения сигналов не терять разрешающей способности устройства.
Вычисления положения объекта в плоскостной системе координат ГY выполняют по количеству импульсов нормированной скважности Δ, заключенных:
- между центрами антенн d, определяющих масштабный коэффициент измерений - N;
- между экстремальными значениями амплитуд в одинаковой фазе для сигналов с различных антенн - N1, N2;
- между экстремальными значениями амплитуд в противоположной фазе для сигналов с различных антенн - ΔN1, ΔN2.
Оценка количества импульсов имеет знак: вправо от положения антенны (+), влево - (-).
Отстояния источника (L, D) по осям координат Г, Y равно:


Где  - измеренный период принимаемого сигнала;
- измеренный период принимаемого сигнала;
 ;
;  - промежутки времени, характеризующие фазы амплитуд принимаемых сигналов.
- промежутки времени, характеризующие фазы амплитуд принимаемых сигналов.
Результаты вычислений положения объекта относительно передатчика L, D по осям Y и Г выводятся в регистратор 6.
Учитывая, что в качестве точек экстремальных значений используют центры протяженности площадок этих значений, как это делается при наблюдении в оптическом спектре, амплитуда напряжения измеряемого сигнала электромагнитного поля U и отсчетная точность измерения напряжения ΔU не влияют на получаемый результат.
Уравнения (1 и 2) являются линейной функцией двух переменных N1, ΔN1, и N2, ΔN2 от аргумента U. Оценку относительной погрешности определения отстояния L по оси У можно произвести по следующей формуле:

где ε(L) - относительная погрешность определения расстояния L;
ε(N) - относительная погрешность определения расстояния N между антеннами 3а и 3б;
ε(N1)=ε(N2) - относительная погрешность определения промежутков времени N1, N2 и ΔN1, ΔN2 принимаемых сигналов;
ε(U) - относительная погрешность определения экстремального значения амплитуды принимаемого сигнала U;
ΔU, U - разрешающая способность (чувствительность) измерения амплитуды и амплитуда сигнала, соответственно.
Отношение N=d/Δ в периоде принимаемой частоты выступает как масштабный коэффициент двух нестабильных во времени параметров: длины базы d, выраженной в метрах, и скважности Δ опорной частоты, которая зависит от множества факторов. Текущая оценка их отношений в каждом цикле измерений обеспечивает независимость масштабного коэффициента от изменений этих двух параметров во времени. Поэтому требование к временной стабильности нормированной частоты определяется только временем между тремя последовательными экстремальными значениями сигнала, равным 1,5 периодам принимаемого сигнала. Это практически исключает требования к стабильности опорной частоты во времени.
Абсолютную погрешность m(L) определения положения (L, D) можно оценить по формуле:

Оценим относительные погрешности измерения отстояния L для случаев использования:
- генератора, имеющего скважность Δ=10-15 с (λ0=0,3 мкн, f0=1015 Гц);
- базы между центрами антенн d=3 м (относительная погрешность ее определения ε(d) составит ε(d)=10-7);
- передатчиков электромагнитного поля с длинами волн в λ=3 м и λ=3000 м (значение ε(T1) составит 10-7, а при ε(T2)=10-10).
Тогда относительная погрешность определения отстояния L при использовании длин волн передатчиков электромагнитного поля от Δ=3÷3000 м составит ε(L)=10-7.
Абсолютная погрешность m(L) определения расстояния L для расстояния L=300 км составит 0,03 м, а для расстояния Δ=3000 км составит 0,3 м.
Таким образом, заявляемый способ повышает точность измерения отстояний L и D от объекта до передатчика электромагнитного поля за счет использования предельно достижимых опорных частот при быстродействии, равном 1,5 периодам принимаемого сигнала.
Физическая сущность заявленного способа для определения положения объекта относительно источника электромагнитного поля, показанная на фиг.1, состоит в определении положения источника в ортогональной системе координат на плоскости, связанной с расположением базы антенн радиоприемника электромагнитного поля, вторая ось которой лежит в плоскости, проходящей через базу и источник поля. Задание направления базы (первой оси системы координат) реализует линейная развертка временного сигнала, проходящего между антеннами приемника, на которую проектируют принимаемые от источника поля сигналы. Положение источника по осям координат определяют по произведению размера базы на коэффициенты, вычисленные геометрическим методом по проекциям сигналов измеряемых напряжений на первую ось системы координат (Г).
Положение приемного устройства относительно источника электромагнитного поля определяется в пространстве по одному источнику, по одному периоду принятого сигнала электромагнитного поля каждой антенной, без влияния помех окружающей среды, аналогично прототипу, но с большим быстродействием.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестно.
Способ определения положения объекта относительно источника электромагнитного поля, включающий прием на объекте сигналов электромагнитного поля источника двумя параллельными дипольными антеннами, расположенными на расстоянии - базе, определение разности фаз и их распределения между принятыми сигналами, путем измерения времени между тремя последовательными экстремальными значениями принимаемых сигналов и времени прохождения вспомогательного электромагнитного сигнала между антеннами, и определение по оценкам времен отстояния объекта от источника, отличающийся тем, что время прохождения вспомогательного сигнала используют для создания временной развертки, служащей осью системы координат, совпадающей с направлением базы, проектируют принимаемые сигналы от передатчика на эту развертку, а в качестве точек экстремальных значений используют центры протяженности площадок этих значений и определяют положение источника в плоскостной ортогональной системе координат, построенной на базе и плоскости, проходящей через базу и источник, в которой лежит вторая ось системы.
Радиоприемник для осуществления способа по п.1, содержащий антенное устройство в виде двух параллельных, дипольных антенн, установленных на расстоянии (базе), между которыми размещен измеритель расстояния между ними, блок управления, измерительный блок, блок определения положения объекта относительно источника электромагнитного поля и регистратор, при этом антенное устройство и измеритель расстояния между антеннами через блок управления подключены к измерительному блоку, выход которого соединен с входом блока определения положения объекта относительно источника, выход которого подключен к регистратору, отличающийся тем, что антенное устройство подключается к измерительному блоку через коммутаторы, соединенные с блоком управления, блок управления включает опорный генератор и устройство линейной развертки, выход которой подключен к измерительному блоку, а в блок определения положения объекта относительно источника электромагнитного поля входит устройство определения протяженности амплитудных уровней сигналов.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций упрощает и детерминирует задачу определения положения и размеров объекта-источника электромагнитного поля относительно объекта-приемника.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы устройства, оборудование и приспособления, применяемые для измерения электромагнитных полей.
Технико-экономическая эффективность заявленного способа заключается в возможности существенного упрощения устройства и унификации алгоритма обработки полученной информации, обеспечивающего повышение быстродействия определения положения приемника относительно источника электромагнитного поля.
Использованная литература
1. RU 2413240 C1, МПК G01S 13/06. Описание изобретения к патенту «Способ определения расстояния от приемника электромагнитного поля на объекте до передатчика и устройство для его осуществления».
2. С.Н. Гузевич. «О стереоскопической модели измерений расстояний в радиотехнических системах» // Радиотехника. Информационно-измерительные и управляющие системы - 2007. - №1. - С.4-9.
3. A.M. Байрашевский и др. Судовая радиоэлектроника и радионавигационные приборы. - М.: Транспорт, 1988. - 271 с.
Способ получения стереоотображений и устройство для его реализации
Оптический способ измерения размеров и положения объекта и дальномер-пеленгатор
Стереоскопический способ определений положения и формы объектов с контролем достоверности
Градиентометрический способ магнитной съемки и устройство для его осуществления
Фотограмметрический способ измерения положения и размеров объекта и устройство для его осуществления
Стереоскопический способ измерения расстояний и судовой дальномер-пеленгатор
Способ получения стереоотображений и устройство для его реализации
Оптический способ измерения размеров и положения объекта и дальномер-пеленгатор
Стереоскопический способ определений положения и формы объектов с контролем достоверности
Градиентометрический способ магнитной съемки и устройство для его осуществления
Фотограмметрический способ измерения положения и размеров объекта и устройство для его осуществления
Стереоскопический способ измерения расстояний и судовой дальномер-пеленгатор

