Результат интеллектуальной деятельности: СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
Вид РИД
Изобретение
Группа изобретений относится к области радиолокации и может быть использована в обзорных радиолокационных станциях (РЛС).
Известен способ радиолокационного обнаружения целей, при котором в каждом направлении зоны обзора РЛС излучают зондирующий сигнал, принимаемый отраженный сигнал сравнивают с порогом обнаружения, при превышении которого в соответствующем элементе зоны обзора принимают решение об обнаружении цели (Справочник по радиолокации. Ред. М. Сколник, т.1, 1976, с.180, Обнаружитель с фиксированным объемом выборки).
Под элементом зоны обзора понимается пространственная область, размеры которой по углу места, азимуту, дальности равны размерам элементов разрешения по соответствующим координатам.
Известное устройство радиолокационного обнаружения целей содержит последовательно соединенные умножитель, интегратор и пороговое устройство (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, 1970, с.102-103). На умножитель подается опорное колебание, соответствующее ожидаемому сигналу, и принятый сигнал. Опорное колебание вырабатываться специальным гетеродином в зависимости от установленного времени запаздывания отраженного сигнала, пропорционального дальности до цели. Сигнал с выхода интегратора подается на пороговое устройство, где сравнивается с порогом обнаружения, который выбирается исходя из вероятности ложной тревоги. Превысивший порог сигнал является сигналом обнаружения цели.
В известных способе и устройстве решение об обнаружении цели принимается по результатам одного зондирования, поэтому любой принятый сигнал, близкий по структуре к излученному сигналу, превысивший порог обнаружения, считается сигналом от цели. К таким сигналам кроме сигналов от целей относятся сигналы от других отражающих объектов: подстилающей поверхности, местных предметов, облачности, облаков дипольных помех, специально создаваемых противником для подавления РЛС. Таким образом, наряду с целями обнаруживаются и пассивные помехи. Это является недостатком известных технических решений.
Наиболее близким к заявляемому способу является способ радиолокационного обнаружения целей, включающий излучение в зоне обзора РЛС зондирующих сигналов, прием сигналов от отражающих объектов и сравнение их с порогом обнаружения в элементах зоны обзора (амплитудный режим), излучение в зоне обзора РЛС импульсов системы СДЦ, прием сигналов от отражающих объектов и сравнение сигналов с выхода системы СДЦ с порогом обнаружения в элементах зоны обзора (режим СДЦ), принятие решения об обнаружении целей в элементах зоны обзора (Воздушно-космическая оборона, №4(11) 2003, с.17, кол. 1-2).
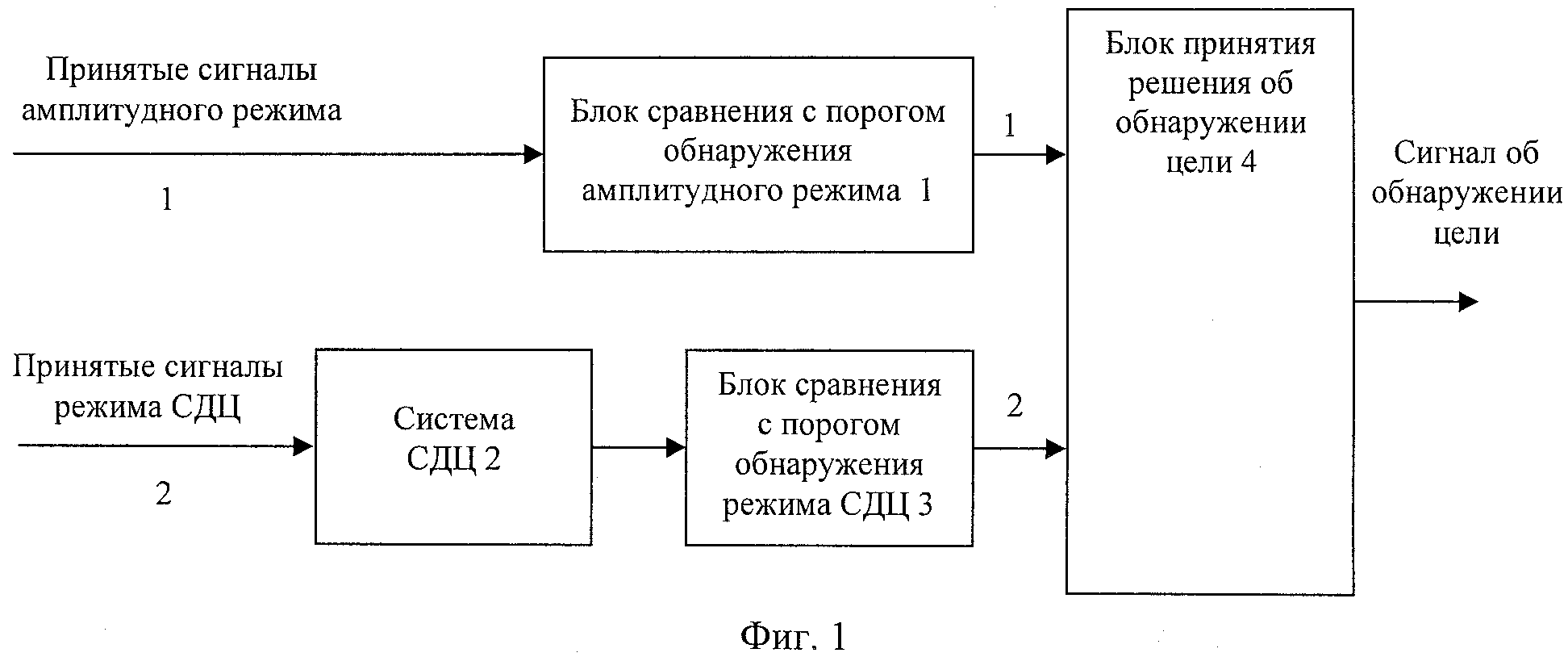
Устройство радиолокационного обнаружения целей, реализующее наиболее близкий способ (фиг.1), содержит блок сравнения с порогом обнаружения амплитудного режима 1, систему СДЦ 2, блок сравнения с порогом обнаружения режима СДЦ 3, блок принятия решения об обнаружении цели 4, при этом вход блока сравнения с порогом обнаружения амплитудного режима 1 и вход системы СДЦ 2 являются соответственно первым и вторым входами устройства, выход системы СДЦ 2 соединен со входом блока сравнения с порогом обнаружения режима СДЦ 3, выходы блока сравнения с порогом обнаружения амплитудного режима 1 и блока сравнения с порогом обнаружения режима СДЦ 3 соединены соответственно с первым и вторым входами блока принятия решения об обнаружении цели 4, выход которого является выходом устройства радиолокационного обнаружения цели (Воздушно-космическая оборона, №4 (11) 2003, с.17, кол. 1-2).
В системе СДЦ используется несколько (обычно не менее трех) импульсов, излучаемых через заданные интервалы времени. В результате вычитания принятых отраженных импульсов подавляются те из них, которые отражены от неподвижных и медленно движущихся объектов, поскольку они мало изменяются от импульса к импульсу. В меньшей степени подавляются импульсы от объектов, движущихся с большими скоростями. В результате на выход системы СДЦ выдаются сигналы, амплитуда которых зависит от скорости отражающего объекта.
В наиболее близких технических решениях в амплитудном режиме осматривается вся зона обзора РЛС, в режиме СДЦ - ее часть. Это связано с тем, что в режиме СДЦ в каждом направлении зоны обзора необходимо излучать несколько импульсов, а временные ресурсы РЛС, как правило, ограничены. Поэтому режим СДЦ преимущественно используется в областях зоны обзора РЛС, где предполагается наибольшее количество пассивных помех, например, в нижней части зоны обзора. Таким образом, там, где применяется режим СДЦ, элементы зоны обзора в этом режиме перекрываются с элементами зоны обзора в амплитудном режиме.
Для элементов зоны обзора, находящихся в области работы только амплитудного режима, решение об обнаружении цели принимается по результатам амплитудного режима, а в области, где работа ведется еще и в режиме СДЦ - по результатам обнаружения в режиме СДЦ. В последнем случае решение об обнаружении цели принимается при превышении порога обнаружения в режиме СДЦ независимо от того, превышен порог обнаружения в амплитудном режиме или нет.
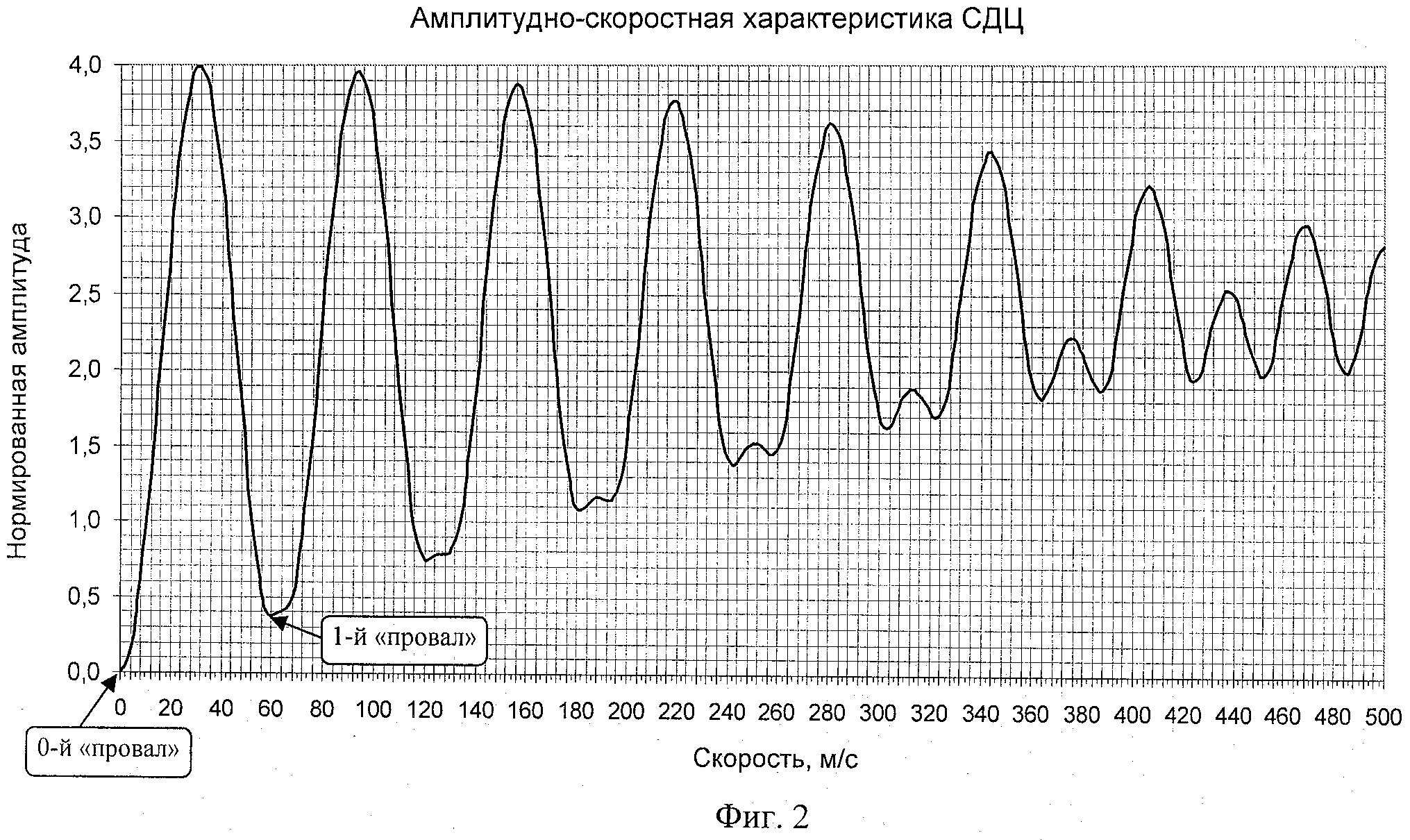
Известно, что в СДЦ вследствие периодического характера амплитудно-скоростной характеристики (АСХ) возникают потери в обнаружении целей (фиг.2). Это происходит при скорости цели, соответствующей положению одного из «провалов» АСХ (Теоретические основы радиолокации. Под ред. Ширмана Я.Д., 1970, с.479, 481).
В наиболее близких технических решениях возможны ситуации, при которых принимаются ошибочные решения:
- в амплитудном режиме порог обнаружения превышен, в режиме СДЦ не превышен. Принимается решение об отсутствии цели, хотя в действительности цель есть, но оказалась в «провале» АСХ
- в амплитудном режиме и в режиме СДЦ пороги обнаружения превышены. Принимается решение об обнаружении цели, хотя присутствует пассивная помеха, уровень которой превышает возможности системы СДЦ по подавлению помех.
Таким образом, недостатком наиболее близких технических решений является низкая достоверность обнаружения целей.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является увеличение достоверности обнаружения целей.
Указанный технический результат достигается тем, что в способе радиолокационного обнаружения целей, включающем излучение в зоне обзора РЛС зондирующих сигналов, прием сигналов от отражающих объектов и сравнение их с порогом обнаружения в элементах зоны обзора (амплитудный режим), излучение в зоне обзора РЛС импульсов системы СДЦ, прием сигналов от отражающих объектов и сравнение сигналов с выхода системы СДЦ с порогом обнаружения в элементах зоны обзора (режим СДЦ), принятие решения об обнаружении целей в элементах зоны обзора, в которых в режиме СДЦ порог обнаружения превышен, а в амплитудном режиме не превышен, согласно изобретению, в каждом элементе зоны обзора, в котором в амплитудном режиме превышен порог обнаружения, вычисляют отношение:
где АСДЦ и ААМП - отношения амплитуд принятых сигналов в режиме СДЦ и в амплитудном режиме к среднеквадратическому значению шума соответственно;
отношение KИ сравнивают с пороговым значением KП, заранее вычисленным для граничной радиальной скорости отражающего объекта Vr гр, задаваемой исходя из допустимых потерь по целям, при выполнении условия KИ>KП принимают решение об обнаружении цели.
Указанный технический результат достигается также тем, что что в качестве системы СДЦ применяют трехимпульсную разностно-временную систему СДЦ, для которой пороговое значение KП вычисляют в соответствии с формулой:

где λ - длина волны сигналов, излучаемых РЛС;
Т1 и Т2 - интервалы времени между излучениями первого и второго, второго и третьего импульсов режима СДЦ соответственно;
Vr гр - граничная радиальная скорость отражающего объекта, при превышении которой объект считается целью, задается исходя из допустимых потерь по целям, имеющих радиальные скорости, значения которых находятся в окрестностях ненулевых «провалов» амплитудно-скоростной характеристики СДЦ;
GСДЦ и GАМП - коэффициенты усиления антенны РЛС в режиме СДЦ и в амплитудном режиме соответственно;
τИ СДЦ и τИ АМП - длительность импульсов в режиме СДЦ и длительность зондирующего сигнала в амплитудном режиме соответственно;
δСДЦ и δАМП - величины потерь сигнала в режиме СДЦ и в амплитудном режиме соответственно.
Указанный технический результат достигается также тем, что радиальную граничную скорость Vr гр задают в соответствии с формулой:
где k - номер ненулевого «провала» (k≥1) амплитудно-скоростной характеристики СДЦ.
Указанный технический результат достигается также тем, что в устройстве радиолокационного обнаружения целей, содержащем блок сравнения с порогом обнаружения амплитудного режима, систему СДЦ, блок сравнения с порогом обнаружения режима СДЦ, блок принятия решения об обнаружении цели, при этом вход блока сравнения с порогом обнаружения амплитудного режима и вход системы СДЦ являются соответственно первым и вторым входами устройства, выход системы СДЦ соединен со входом блока сравнения с порогом обнаружения режима СДЦ, выход блока сравнения с порогом обнаружения амплитудного режима и выход блока сравнения с порогом обнаружения режима СДЦ соединены соответственно с первым и вторым входами блока принятия решения об обнаружении цели, предназначенными для сигналов об обнаружении в амплитудном режиме и в режиме СДЦ соответственно, выход блока принятия решения об обнаружении цели является выходом устройства радиолокационного обнаружения целей, согласно изобретению, вход блока сравнения с порогом обнаружения амплитудного режима и выход системы СДЦ соединены соответственно с третьим и четвертым входами блока принятия решения об обнаружении цели, предназначенными для принятых сигналов амплитудного режима и сигналов с выхода СДЦ соответственно.
Суть заявляемых технических решений заключается в следующем.
Заявляемые технические решения, как и в прототипе, работают в области зоны обзора, где обнаружение ведется совместно в амплитудном режиме и в режиме СДЦ.
В элементах зоны обзора, в которых в амплитудном режиме порог обнаружения превышен, решение об обнаружении цели принимается на основе анализа отношения величины сигнал/шум AСДЦ на выходе СДЦ в режиме СДЦ к величине сигнал/шум AАМП в амплитудном режиме в соответствии с формулой (1). При этом не важно, превышен порог обнаружения в режиме СДЦ или нет.
Указанный анализ основан на следующем.
Положение минимумов («провалов») и максимумов («пиков») АСХ однозначно связано с типом СДЦ, количеством и параметрами импульсов, периодами их следования (на фиг.2 приведен пример нормированной к одному импульсу СДЦ АСХ трехимпульсной разностно-временной СДЦ). «Провалы» и «пики» АСХ принято нумеровать. В описании «провалы» пронумерованы целыми числами, начиная с нуля. Нулевой «провал» соответствует нулевой скорости.
В качестве признака, по которому отражающий объект принимается за цель или за пассивную помеху, используется его радиальная скорость. Если радиальная скорость объекта превышает заранее выбранную граничную радиальную скорость Vr гр, то объект считается целью, в противном случае - пассивной помехой. Граничная радиальная скорость Vr гр выбирается исходя из допустимых потерь по целям в соответствии с формулой (3).
При принятии решения об обнаружении цели, движущейся относительно РЛС, используется не значение радиальной скорости объекта (которая, например, при регулярном обзоре зоны неизвестна), а измеренное в элементе зоны обзора РЛС отношение KИ величины сигнал/шум AСДЦ на выходе СДЦ в режиме СДЦ к величине сигнал/шум AАМП в амплитудном режиме (1). Указанное отношение зависит от радиальной скорости цели и не зависит от многих неизвестных параметров цели и РЛС, например таких как эффективная поверхность рассеяния цели и уровень коэффициента усиления антенны в направлении на цель.
Отношение KИ сравнивается с пороговым значением KП (2), заранее вычисленным для выбранной граничной радиальной скорости отражающего объекта Vr гр. При выводе формулы (2) учитывалось выполняющееся на практике равенство импульсных мощностей сигналов, излучаемых в амплитудном режиме и в режиме СДЦ.
При выполнении условия KИ>KП принимается решение об обнаружении цели в данном элементе зоны обзора.
Величину граничной радиальной скорости Vr гр отсчитывают в области АСХ СДЦ от нулевой скорости до ее первого «пика» (фиг.2). При этом значение Vr гр снимают в точке этой области АСХ, соответствующей нормированной амплитуде выбранного ненулевого «провала» АСХ. Предпочтительным является задание граничной радиальной скорости Vr гр исходя из нормированной амплитуды первого (k=1) «провала» АСХ (зависимый пункт 3 формулы изобретения), поскольку в этом случае значение скорости Vr гp относительно других «провалов» АСХ наименьшее и потерь в обнаружении целей со скоростями, соответствующими другим «провалам», нет.
Таким образом, принятие решения об обнаружении сигнала от цели при совместном использовании амплитудного режима и режима СДЦ позволяет увеличить достоверность обнаружения сигналов от целей, то есть достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - функциональная схема устройства радиолокационного обнаружения целей, реализующего наиболее близкий способ.
Фиг.2 - пример амплитудно-скоростной характеристики трехимпульсной разностно-временной системы СДЦ, нормированной к амплитуде одного импульса СДЦ.
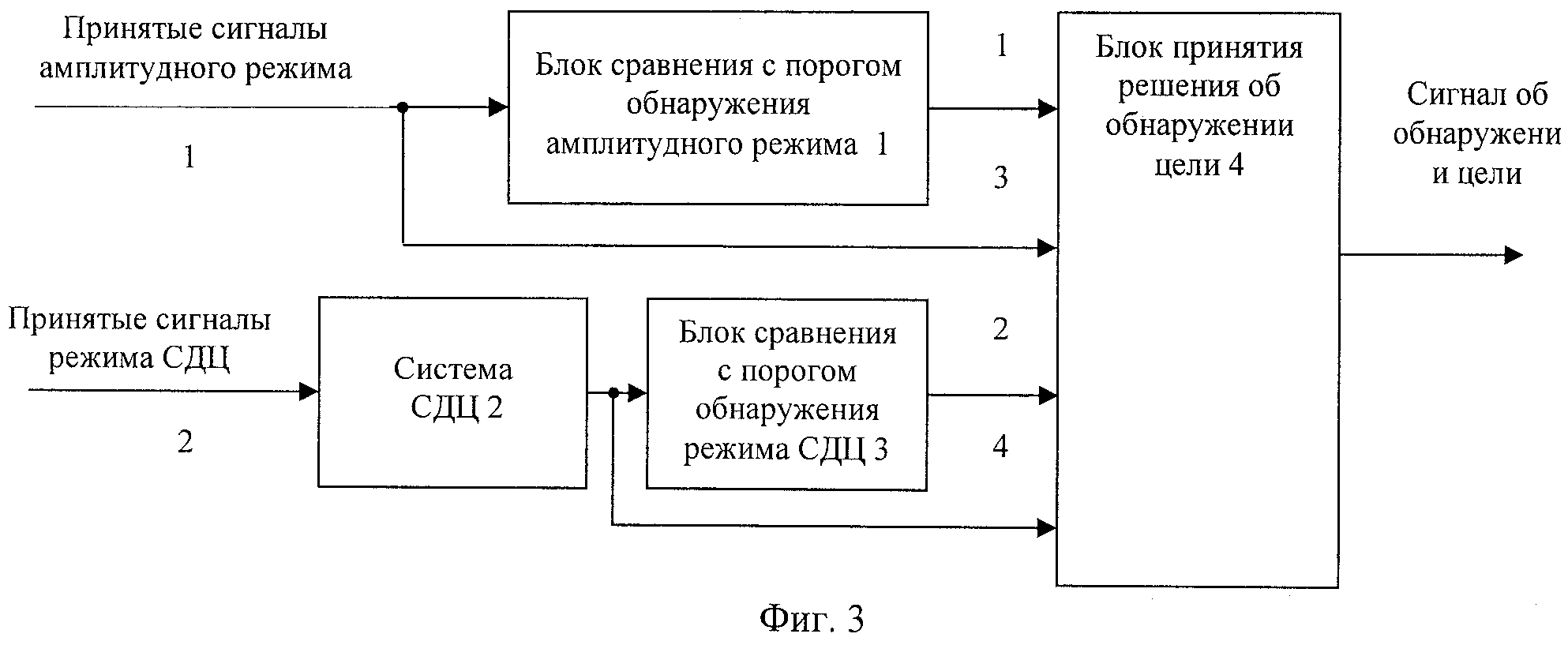
Фиг.3 - функциональная схема устройства радиолокационного обнаружения целей, реализующего заявляемый способ.
Устройство радиолокационного обнаружения целей, реализующее заявляемый способ (фиг.3), содержит блок сравнения с порогом обнаружения амплитудного режима, систему СДЦ, блок сравнения с порогом обнаружения режима СДЦ, блок принятия решения об обнаружении цели, при этом вход блока сравнения с порогом обнаружения амплитудного режима и вход системы СДЦ являются соответственно первым и вторым входами устройства, выход системы СДЦ соединен со входом блока сравнения с порогом обнаружения режима СДЦ, выход блока сравнения с порогом обнаружения амплитудного режима и выход блока сравнения с порогом обнаружения режима СДЦ соединены соответственно с первым и вторым входами блока принятия решения об обнаружении цели, вход блока сравнения с порогом обнаружения амплитудного режима и выход системы СДЦ соединены соответственно с третьим и четвертым входами блока принятия решения об обнаружении цели, выход которого является выходом устройства радиолокационного обнаружения целей.
Устройство радиолокационного обнаружения целей может быть выполнено с использованием следующих функциональных элементов.
Блок сравнения с порогом обнаружения амплитудного режима 1 - выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, 1984). В блоке производится сравнение амплитуды сигнала, принятого в амплитудном режиме, с порогом обнаружения амплитудного режима. С выхода блока 1 выдается единичный сигнал, если принятый сигнал превышает пороговый уровень, сигнал не выдается, если порог обнаружения не превышен.
Система СДЦ 2 - трехимпульсная разностно-временная система СДЦ, может быть реализована на двух сдвигающих линиях задержки, компенсирующей линии задержки и сумматоре (Справочник по радиолокации. Ред. М. Сколник, 1979, т.3, с.319-320).
Обработка сигналов в трехимпульсной разностно-временной системе СДЦ осуществляется в соответствии с формулой:

где u - сигнал на выходе системы СДЦ,
u1, u2, u3, - амплитуды 1-го, 2-го и 3-го принятых импульсов соответственно.
Блок сравнения с порогом обнаружения режима СДЦ 3 - выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, 1984). В блоке производится сравнение амплитуды сигнала с выхода системы СДЦ 2 с порогом обнаружения. С выхода блока 3 выдается единичный сигнал, если принятый сигнал превышает пороговый уровень, сигнал не выдается, если порог обнаружения не превышен.
Блок принятия решения об обнаружении цели 4 - вычислитель (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, 1984), реализующий вычисления по формулам (1), (2), (3) и проверку условия об обнаружении цели KИ>KП. Пороговое значение KП вычисляется заранее для граничной радиальной скорости отражающего объекта Vr гр, задаваемой исходя из допустимых потерь по целям, и хранится в блоке 4. Заявляемое устройство радиолокационного обнаружения целей работает следующим образом.
В направлениях зоны обзора РЛС излучаются зондирующие сигналы амплитудного режима. В направлениях зоны обзора, в которых применяется режим СДЦ, после излучения зондирующего сигнала амплитудного режима, излучаются импульсы режима СДЦ. В блоке сравнения с порогом обнаружения амплитудного режима 1 принятые сигналы амплитудного режима сравниваются с порогом обнаружения амплитудного режима, установленным в соответствии с заданным уровнем ложных тревог. В системе СДЦ 2 осуществляется обработка принятых импульсов по формуле (4). Сигналы, зависящие от радиальной скорости отражающего объекта, с выхода СДЦ 2 поступают на вход блока сравнения с порогом обнаружения режима СДЦ 3, где сравниваются с порогом обнаружения режима СДЦ, установленным исходя из заданного уровня ложных тревог. Если сигналы, поступившие в блоки сравнения 1 и 3, превышают соответствующие пороги обнаружения, то на выходах этих блоков формируются стандартные единичные сигналы - признаки превышения порогов, которые подаются соответственно на первый и второй входы блока принятия решения об обнаружении цели 4. Принятые в амплитудном режиме сигналы и сигналы с выхода системы СДЦ 2 подаются соответственно на третий и четвертый входы блока принятия решения об обнаружении цели 4. В этом блоке принимается решение об обнаружении цели в элементе зоны обзора. При этом сигнал об обнаружении цели выдается в двух случаях:
- с входа блока сравнения с порогом обнаружения режима СДЦ 3 поступил сигнал о превышении порога обнаружения в режиме СДЦ, а сигнал с выхода блока сравнения с порогом обнаружения амплитудного режима 1 о превышении порога обнаружения в амплитудном режиме отсутствует;
- с выхода блока сравнения с порогом обнаружения амплитудного режима 1 поступил сигнал о превышении порога обнаружения и при этом отношение Кц, вычисленное в блоке 4 в соответствии с формулой (1) с использованием поступивших в блок 4 сигналов, принятых в амплитудном режиме, и с выхода СДЦ, удовлетворяет условию KИ>KП.
Пороговое значение KП вычисляется заранее по формуле (2) исходя из граничной радиальной скорости отражающего объекта Vr гр, задаваемой в соответствии с выражением (3), и постоянно хранится в блоке 4.
Таким образом достигается заявляемый технический результат.

Способ защиты обзорной радиолокационной станции с фазированной антенной решеткой от помех (варианты)
Способ защиты от пассивных помех и радиолокационная станция для его осуществления
Способ пеленгации постановщика активных помех
Способ обнаружения радиолокационных сигналов и радиолокационная станция для его осуществления
Способ радиолокационного обзора
Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления
Способ радиолокационного обнаружения сигналов, отраженных от целей, и устройство для его реализации
Способ осмотра зоны обзора и радиолокационная станция для его реализации
Устройство обработки сигнала (варианты)
Способ обзора пространства радиолокационной станцией
Способ радиолокационного обзора зоны пространства
Способ обнаружения траектории объекта
Способ радиолокационного обнаружения сигналов, отраженных от целей, и устройство для его реализации
Способ селекции движущихся целей и устройство для его реализации
Способ сопровождения траектории цели и радиолокационная станция для его реализации
Способ обзора зоны радиолокационной станции
Способ сопровождения траектории цели

