Результат интеллектуальной деятельности: ПОДВОДНЫЙ ПЛАНЕР (ВАРИАНТЫ)
Вид РИД
Изобретение
Изобретение относится к судостроению, конкретно к автономным необитаемым подводным самоходным аппаратам (планерам-глайдерам) для исследования водных акваторий.
На сегодняшний день выпускается несколько моделей планеров. Среди них наиболее известны Scarlet Knight, APEX производитель Teledyne Webb, Seaglider разработчик University of Washington, Spray разработчик Woods Hole Oceanographic Institution, Scripps Institution of Oceanography SeaExplorer производитель ACSA, ALBAC Kawaguchi Япония (http://en.wikipedia.org/wiki/Seaglider'). Подводные планеры имеют различную форму корпуса от торпедообразной до удобообтекаемой и, как правило, жестко закрепленные крылья (симметричные или плоские) (IEEE Journal of oceanic engineering, vol. 26, n.4, p.437-446, 2001).
Однако жесткое крепление крыльев, с начальным углом установки ноль градусов для создания одинаковых условий обтекания жидкости при планировании вверх и вниз (погружение и всплытие), приводит к увеличению коэффициента гидродинамического сопротивления, поскольку угол планирования не совпадает с продольной осью планера, так как угол атаки крыла задается дифферентом.
Известны подводные планеры с подвижным крылом, например, подводный планер по з. США №20090241826. Планер оборудован системой управления движением каждой из консолей крыла, обеспечивающей движение консолей крыла вверх, когда планер опускается вниз и вниз, когда планер идет вверх. Такая конструкция планера за счет V образности крыла приводит к увеличению поперечной устойчивости аппарата и дает возможность управления поворотом за счет удержания электромагнитом или другим устройством одну из консолей в противоположном положении.
Однако такая конструкция планера не позволяет уменьшить коэффициент гидродинамического сопротивления и не позволяет минимизировать угол планирования без увеличения лобового сопротивления и как следствие потери скорости.
Наиболее близким к заявляемому является подводный планер, корпус которого снабжен крылом из двух подвижных консолей и подвижным хвостовым оперением, которые приводятся в движение четырьмя двигателями. Планер оборудован электронными системами сбора и передачи информации, управления движением планера и движением консолей, системами регулирования плавучестью и изменения дифферента, расположенными внутри корпуса. Консоли и хвостовое оперение установлены на корпусе планера на оси по принципу горизонтальных рулей подводной лодки, то есть выполнены балансирными, для уменьшения величины вращающего момента, создаваемого электродвигателем при изменении углов атаки, с возможностью принудительного по заданной программе изменения угла атаки консолей и хвостового оперения, которое осуществляется двигателями (в.з. Японии №2007276609А). В авиации, когда ось вращения смещена назад по отношению к передней кромке, такое расположение оси вращения называют осевой компенсацией, для уменьшения шарнирного момента.
Такая конструкция планера дополнительно решает проблему высокой маневренности для выполнения сложных движений - крутые виражи, резкие торможения, остановки, погружение при сохранении горизонтального положения планера, что не могут выполнять планеры с неподвижным крылом.
Однако данная конструкция планера сложна и дорога, требует затрат энергии для работы двигателей, обеспечивающих повороты консолей и хвостового оперения, приводит к увеличению веса и размеров планера из-за установки дополнительных электроприводов (серводвигатели, редукторы), необходимости герметизации валов вращения оси, дополнительного программного обеспечения для системы управления движением консолей и оперения и, как следствие, к уменьшению веса полезной нагрузки и автономности аппарата. Кроме того, из-за увеличения плотности внутренней компоновки планера увеличивается диапазон изменения силы плавучести, что требует увеличения времени и затрат энергии на изменение плавучести. Применение дополнительных электромеханических устройств увеличивает шумы оборудования, что ведет к повышению вероятности обнаружения планера и вносит помеху при гидроакустических исследованиях. Выполнение крыла из двух лежащих в одной плоскости консолей снижает поперечную устойчивость планера.
Задача изобретения - упрощение конструкции планера, снижение шума и энергозатрат, увеличение автономности и полезной нагрузки планера при тех же массогабаритных характеристиках, улучшение гидродинамических характеристик, поперечной устойчивости, что достигается достигается минимизацией коэффициента лобового сопротивления корпуса планера за счет автоматического изменения угла атаки в зависимости от величины скорости и направления набегающего потока
Поставленная задача решается подводным планером, состоящим из корпуса, крыла из двух шарнирпо присоединенных к корпусу консолей, киля и системы изменения углов атаки консолей, а также включает электронные системы сбора и передачи информации, управления движением планера, регулирования плавучестью и изменения дифферента и крена, расположенными внутри корпуса, при этом консоли установлены на оси, проходящей за центром давления крыла, а система изменения углов атаки крыла выполнена саморегулируемой в зависимости от скорости и направления набегающего потока и включает механическую систему ограничения диапазона изменения углов поворота консолей и связанные с ней упругие элементы, регулирующие пропорционально вращательному моменту изменение величины углов атаки крыла и имеющие жесткость, обеспечивающую угол атаки крыла ноль градусов при нахождении планера в покое.
Поставленная задача решается также подводным планером, состоящим из корпуса, крыла из двух подвижно присоединенных к корпусу консолей, киля и системы изменения углов атаки консолей, а также включает электронные системы сбора и передачи информации, управления движением планера, регулирования плавучестью и изменения дифферента и крена, расположенными внутри корпуса, при этом консоли установлены на оси вращения, проходящей за центром давления крыла, а системы изменения углов атаки консолей и соединения консолей с корпусом планера объединены путем установки на осях вращения консолей ротационных демпферов с двусторонним демпфирующим действием и ограниченным углом вращения
В данном варианте подводного планера функцию упругого элемента выполняет жидкость демпфера, а диапазон изменения угла атаки определяется углом вращения оси демпфера.
Предлагаемые конструкции планера с установкой крыла на оси вращения, проходящей за центром давления крыла и системой саморегуляции углов атаки крыла в зависимости от скорости и направления набегающего потока, обеспечивают изменение угла атаки крыла в зависимости от изменения величины и направления гидроаэродинамической силы и обеспечивают условия, при которых направление движения планера всегда совпадает с осью симметрии корпуса, то есть достигается минимизация угла планирования и коэффициента лобового сопротивления планера без дополнительных энергозатрат, снижение шумовых помех и увеличение автономности, полезной нагрузки планера, горизонтальной скорости и длины цикла движения при тех же массогабаритных характеристиках.
Из аэродинамики известно, что величину Cx/Cy 3/2 называют коэффициентом мощности, так как она характеризует мощность, развиваемую силой веса при опускании планера. Так же известно, что минимальная скорость снижения будет соответствовать минимальному значению коэффициента мощности, то есть необходимо снижать величину Cx и увеличивать Cy. Режим минимальной скорости снижения не соответствует режиму наибольшего качества крыла, а получается на несколько большем угле атаки, то есть планирование на режиме минимального снижения соответствует оптимальному коэффициенту подъемной силы Су опт
Установка консолей на оси вращения, проходящей за центром давления крыла приводит к увеличению вращающего (шарнирного) момента, необходимого для поворота консолей при изменении направления набегающего потока.
Система ограничения диапазона изменения углов поворота консолей может быть выполнена механической и конструктивно может быть реализована различными способами с достижением одного и того же результата, например, в виде двух противоположно расположенных на поверхности корпуса ограничителей (упоров) поворота каждой из консолей или, если консоли закреплены на одной оси вращения, ограничить угол поворота можно установив ограничители внутри корпуса; система может быть реализована и путем выполнения шарнирного соединения консолей с корпусом с использованием шарниров с ограниченным углом вращения. В зависимости от выбранной системы ограничения диапазона изменения углов поворота консолей изменяется и размещение связанного с ней упругого элемента, который регулирует изменение величины углов атаки, при этом жесткость упругого элемента, обеспечивающая нулевой угол атаки крыла при нахождении планера в покое, может быть рассчитана по известным закономерностям (С.Д. Пономарев, Л.Е. Андреева. Расчет упругих элементов машин и приборов. 1980 г.) или подобрана экспериментальным путем.
Возможен вариант реализации системы саморегулирования углов атаки, при котором ограничители используют для крепления упругих элементов, например в виде пружин различного вида и конструкции: плоских, витых, пружин растяжения и других.
Возможен вариант, при котором упругий элемент выполнен в виде одной или двух зеркально установленных пружин кручения на оси шарниров.
В качестве упругого элемента, в зависимости от места его установки и характера работы (изгиб, растяжение, сжатие), может выступать, например, плоская пружина или пружины кручения, растяжения, сжатия или торсион. От выбора типа упругого элемента зависит выбор материала для его изготовления, например, металл, пластик, резина и другие.
Сущность изобретения приведена на Фиг.1-3.
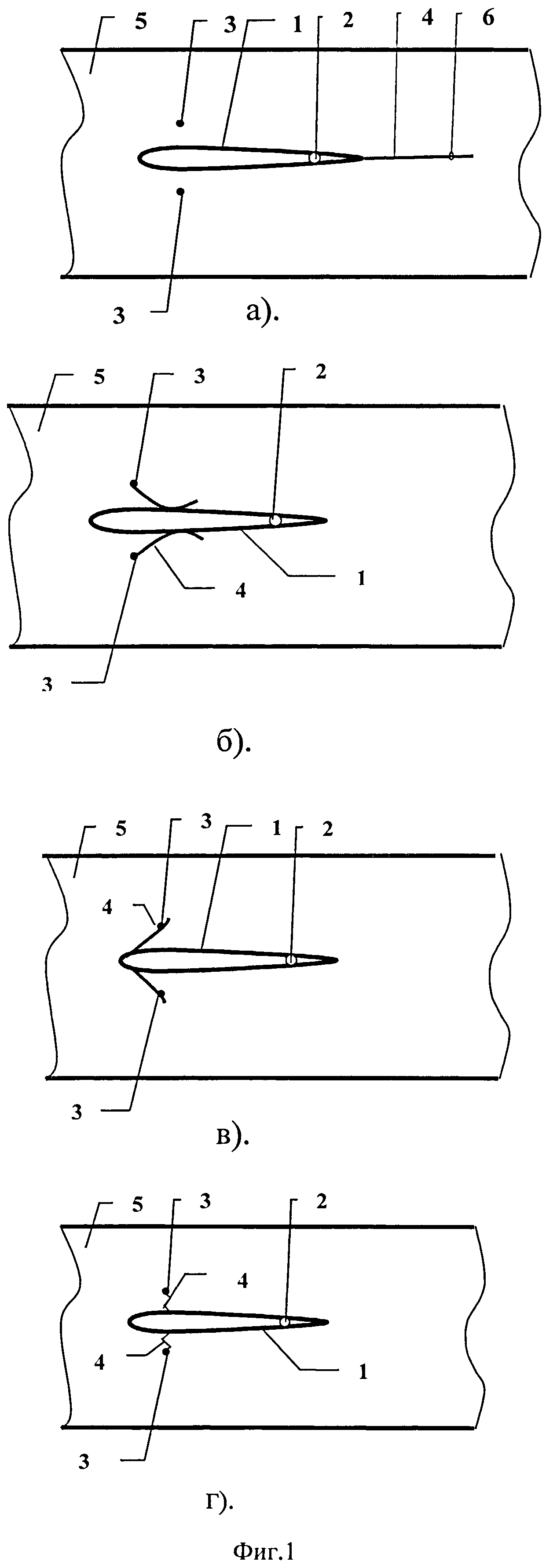
На Фиг.1 (а-г) представлено несколько возможных схем систем саморегулирования угла атаки консоли при установке ограничителей угла поворота на поверхности корпуса планера и различных вариантах размещения упругих элементов, им соответствующих, где 1 - консоль, 2 - ось вращения (крепления) консоли, 3 - ограничители угла поворота, 4 - упругий элемент, 5 - корпус, 6 - фиксатор-стопор для упругого элемента.
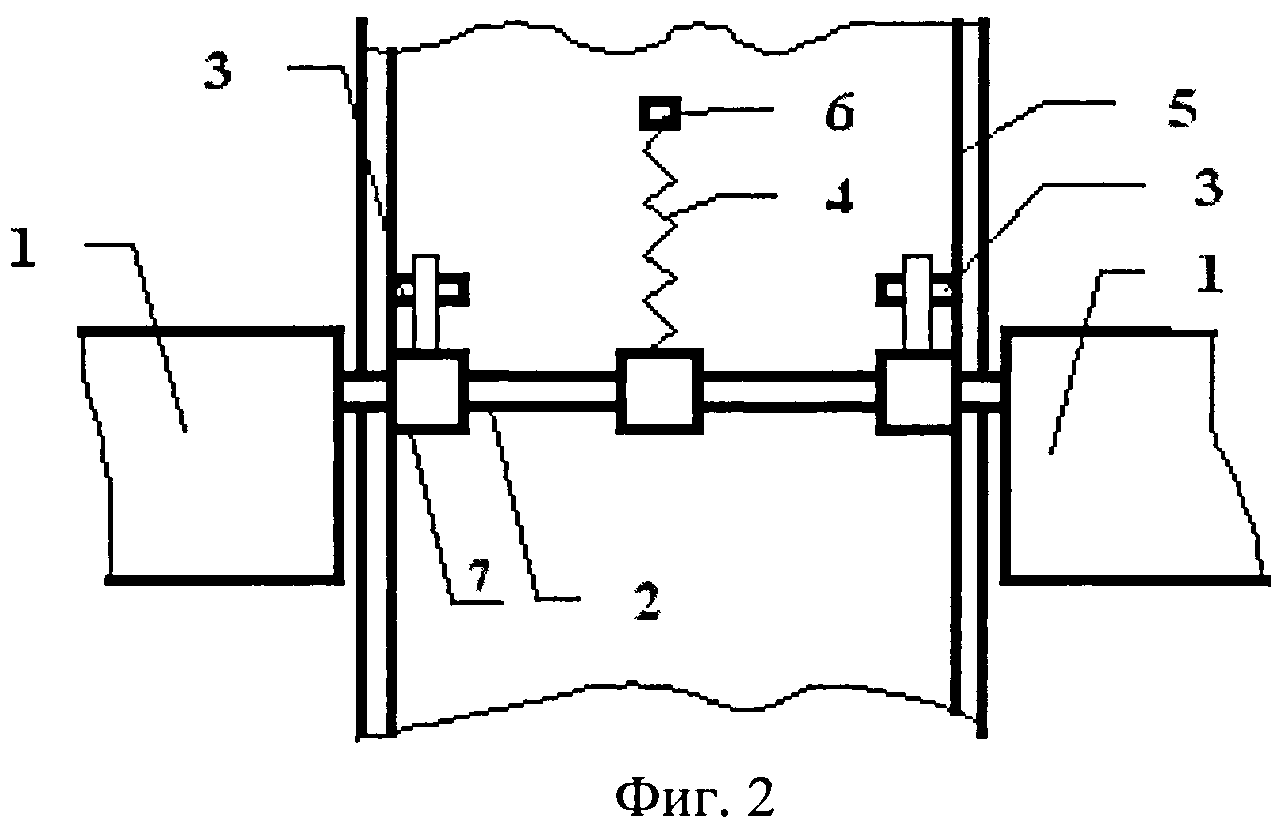
На Фиг.2 - представлена схема системы саморегулирования угла атаки крыла при установке ограничителей угла поворота и упругого элемента внутри корпуса планера на общей оси вращения консолей, где 7 - втулка.
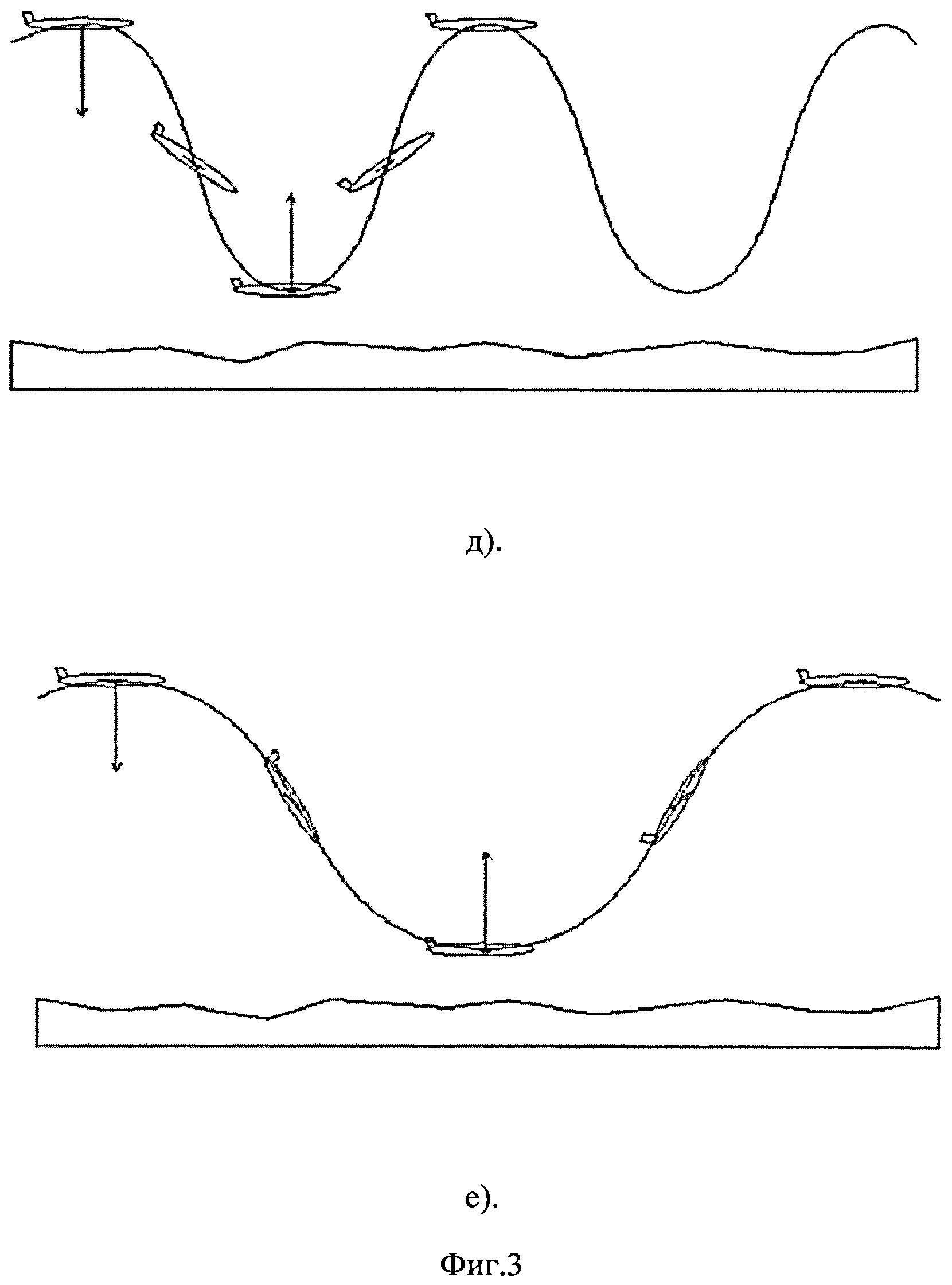
На Фиг.3 для сравнения представлены схема движения планера с неподвижным (д) и крылом с системой регулирования угла атаки крыла (е).
При закреплении ограничителей 3 на поверхности корпуса 5 (Фиг.1 а-г), они устанавливаются за передней кромкой консоли 1, угол поворота определяется их расстоянием от продольной оси планера и равен углу оптимального качества для применяемого крыла.
Консоли крыла в свою очередь могут быть установлены как на одной оси 2, проходящей через корпус, так и на двух независимых осях.
Установка же упругого элемента может быть выполнена различными способами, каждый из которых обеспечивает выполнение им своей функции - регулирование угла атаки крыла. Например,
- упругий элемент 4 (пружина, работающая на изгиб) одним концом жестко закреплен на задней (Фиг.1а) или передней кромке корневой части консоли, а его свободный конец зафиксирован на корпусе с возможностью свободного продольного (горизонтального) перемещения (скольжения) в фиксаторе, так как при изгибе упругого элемента происходит его удлинение;
- упругий элемент 4 может быть выполнен из двух частей, при этом один конец каждой из частей жестко закреплен на соответствующем ограничителе 3, а другой имеет возможность свободного скольжения по поверхности консоли 1 (Фиг 1б);
- упругий элемент 4 может быть выполнен V-образным, центральная часть которого жестко закреплена на передней кромке корневой части консоли 1, а свободные концы расположены касательно между ограничителями 3 угла поворота консоли и поверхностями консоли 1 (Фиг.1в);
- упругий элемент выполнен в виде пружины растяжения и закреплен между ограничителями и поверхностями крыла (Фиг.1г);
- при размещении консолей 1 на одной оси, упругий элемент 4 одним концом жестко закреплен по центру оси 2, а его свободный конец зафиксирован с возможностью продольного скольжения, при этом ограничители изменения диапазона угла поворота могут располагаться как на поверхности корпуса, так и внутри него.
При установке ограничителей угла поворота и упругого элемента внутри корпуса планера на общей оси 2 вращения консолей ось 2 герметизируется от внешней среды сальниками, осевое перемещения фиксируется втулками 7, выполненными в виде цилиндрических секторов с центральным углом равным диапазону поворота консолей 1 и ограничителей (стопоров) 3, установленных на внутренней части корпуса в секторе вращения втулок, или двух стопоров на каждой из внутренней сторон корпуса и двух рычагов между стопорами установленных на оси 2. По центру оси 2 закреплен рычаг (на фиг.2 не показан), к концу которого крепится подвижно одним концом упругий элемент 4 (витая пружина растяжения, эластичная резина), а другой конец закреплен к корпусу на фиксаторе 6. В случае применения упругих элементов работающих на изгиб крепление к рычагу должно быть жестким (неподвижным), а второй конец имел возможность перемещаться в своей плоскости (Фиг.2).
Перечисленные выше примеры реализации системы саморегулирования углов атаки крыла подводного планера в зависимости от скорости и направления набегающего потока не являются исчерпывающими и конкретный выбор будет определяться исходя из выбранных материалов для изготовления планера, формы и размеров корпуса, профиля и размеров крыла и от поставленных научных задач.
Для увеличения поперечной устойчивости планера целесообразно использовать шаровые шарниры для крепления консолей к корпусу, что позволит изменять V-образность крыла в зависимости от планирования вверх или вниз.
Движение планера осуществляется следующим образом (Фиг.3е). Первоначально планер находится на плаву на поверхности воды и за счет вычисленной или подобранной экспериментально жесткости упругих элементов 4 его крыло имеет нулевой угол атаки. По команде системы управления планер любыми известными способами изменяет дифферент на нос, плавучесть на отрицательную, дифферент на нос и начинает погружение. При погружения возникает сила сопротивления набегающего потока на нижние плоскости консолей и, так как ось вращения смещена к задней кромке консолей, возникает вращающий момент, который, преодолевая сопротивление упругих элементов 4, поворачивает консоли 1 на угол пропорционально силе давления набегающего потока, что приводит к увеличению угла атаки и, как следствие, увеличению подъемной силы крыла и горизонтальному движению. Дальнейшее изменение плавучести и смещение центра тяжести планера приведут к ускорению движения. При достижении максимальной скорости планирования, ограниченной гидродинамическим сопротивлением, вращающий момент поворачивает крыло на наивыгоднейший угол атаки для установленного крыла, то есть на угол атаки оптимального качества крыла, заданный верхним ограничителем, чем и достигается оптимальный режим планирования. При достижении заданной глубины планирования с системы управления поступает команда на смену тангажа (дифферента) и плавучести на противоположные по знаку. Так как процесс смены плавучести происходит постепенно, то так же постепенно происходит и замедление планирования. Давление набегающего потока воды падает и под действием упругих элементов плавно уменьшается угол атаки и подъемная сила крыла. Планер с дифферентом на корму начинает всплывать, набегающий поток воды давит на верхнюю плоскость крыла и преодолевая сопротивления упругих элементов разворачивает крыло на отрицательный угол атаки, что вызывает инверсию точки приложения подъемной силы крыла и планер начнет планировать вверх опираясь уже на верхнюю плоскость крыла. При увеличении силы плавучести увеличится вращающий момент на крыле и в зависимости от увеличения скорости всплытия пропорционально увеличивается угол атаки крыла. При достижении заданной глубины всплытия процесс повторяется, если это задано программой.
Дополнительно возможно выполнение ограничителей в виде электромагнитных защелок, что позволит задействовать консоли в процессе поворотов и уменьшит радиус поворота.
В случае второго варианта подводного планера, его конструкция включает корпус, крыло, установленное на оси вращения, проходящей за центром давления и состоящее из двух консолей, киль, а также электронные системы сбора и передачи информации, управления движением планера, регулирования плавучестью и изменения дифферента и крена, расположенными внутри корпуса. Консоли соединены с корпусом посредством ротационных демпферов с двусторонним демпфирующим действием и ограниченным углом вращения, величину которого выбирают исходя из угла атаки крыла при движении подводного планера.
Ротационный демпфер с ограниченным углом вращения является промышленно выпускаемой продукцией (http://www.bibus.ru/ru/produktyreshenija/pnevmatika/tekhnologii-tormozhenija/rotacionnye-dempfery/; http://bibus.com.ua/prod/21; http://bibus.com.ua/tmp/ACE_Kat_2006_engl.pdf;).
Демпфер состоит из герметичного цилиндрического корпуса (статора) с внутренними наплывами на стенках, которые являются упорами для статора, обеспечивающими заданный угол поворота консолей, равный углу атаки, образуя при этом рабочие камеры. Ротор включает две пластины в продольной оси вала. Пространство между ротором и статором заполнено жидкостью. Жидкость проталкивается из одной камеры в другую с помощью движения ротора через регулирующие отверстия, находящиеся либо в пластинах либо в зазорах между ротором и статором либо другим приемлемым способом. Момент демпфирования определен вязкостью жидкости и размером перепускаемых отверстий, что позволяет плавно изменять угол атаки в зависимости от величины потока.
Движение планера с объединенной системой изменения углов атаки консолей и соединения консолей за счет устаноновки на оси вращения консолей ротационного демпфера с двусторонним демпфирующим действием и ограниченным углом вращения осуществляется следующим образом (Фиг.3е). Первоначально планер находится на плаву на поверхности воды и его крыло находится в безразличном состоянии. По команде системы управления планер любыми известными способами изменяет плавучесть на отрицательную и начинает погружение. При погружения возникает сила сопротивления набегающего потока на нижние плоскости консолей и, так как ось вращения смещена к задней кромке консолей, возникает вращающий (шарнирный) момент, который поворачивает консоли на угол атаки, заданный углом поворота в демпфера, при котором достигается оптимальное качество установленного крыла. Затем по команде изменяют дифферент на нос, что приводит к переходу вертикального движения в горизонтальное за счет подъемной силы крыла, увеличению угла атаки и, как следствие, увеличению подъемной силы крыла и горизонтальному движению. Дальнейшее изменение (уменьшение) плавучести и смещение центра тяжести планера приведут к ускорению движения. При достижении максимальной скорости планирования, ограниченной гидродинамическим сопротивлением планера, вращающий момент поворачивает крыло па оптимальный угол атаки для установленного крыла, то есть на угол атаки оптимального качества крыла, заданный углом поворота в демпфере, чем и достигается оптимальный режим планирования (минимальная скорость снижения) и плавность изменения. При достижении заданной глубины планирования с системы управления поступает команда на смену тангажа (дифферента) и плавучести на противоположные по знаку. Так как процесс смены плавучести происходит постепенно, то также постепенно происходит и замедление планирования. Планер с дифферентом на корму начинает всплывать, набегающий поток воды давит на верхнюю плоскость крыла и, преодолевая сопротивления жидкости в демпфере, разворачивает крыло на отрицательный угол атаки, что вызывает инверсию точки приложения подъемной силы крыла и планер начнет планировать вверх, опираясь уже на верхнюю плоскость крыла. При увеличении силы плавучести увеличится вращающий (шарнирный) момент на крыле и в зависимости от увеличения скорости всплытия пропорционально увеличивается угол атаки крыла. При достижении заданной глубины всплытия процесс повторяется, если это задано программой.
Таким образом, система саморегулирования угла атаки позволяет минимизировать угол планирования и коэффициент лобового сопротивления аппарата, то есть обеспечить планирование с минимально возможным гидродинамическим сопротивлением, в результате чего достигается максимально возможная скорость планирования при минимальной вертикальной скорости снижения, следовательно, увеличивается горизонтальная скорость и длина цикла при одинаковых с прототипом массогабаритных характеристиках, но с большей полезной нагрузкой и автономностью.
Предлагаемые конструкции подводного планера, обеспечивающие минимизацию угла планирования и коэффициента лобового сопротивления планера без дополнительных энергозатрат, позволят достичь снижения шумовых помех и увеличение автономности и полезной нагрузки планера, горизонтальной скорости и длины цикла при тех же массогабаритных характеристиках, что и прототипа, значительно упрощают сборку планера, позволяют снизить стоимость.
Метод определения нелинейного акустического параметра жидкостей и устройство для его осуществления
Способ определения местоположения источника свиста в легких человека
Способ оценки концентрации метана в водной толще в областях его пузырьковой разгрузки
Способ пассивной акустической локации подводных пловцов
Способ просветного акустического зондирования легких
Способ оценки доплеровского смещения несущей частоты сложного сигнала
Двухкомпонентный приемник градиента давления
Комбинированный гидроакустический приемник
Способ измерения структуры импульсной функции отклика во времени в неоднородной среде
Способ измерения эквивалентной температуропроводности верхнего слоя донных осадков морских акваторий и устройство для его осуществления
Метод определения нелинейного акустического параметра жидкостей и устройство для его осуществления
Способ определения местоположения источника свиста в легких человека
Способ оценки концентрации метана в водной толще в областях его пузырьковой разгрузки
Способ пассивной акустической локации подводных пловцов
Способ просветного акустического зондирования легких
Способ оценки доплеровского смещения несущей частоты сложного сигнала
Двухкомпонентный приемник градиента давления
Комбинированный гидроакустический приемник
Способ измерения структуры импульсной функции отклика во времени в неоднородной среде
Способ измерения эквивалентной температуропроводности верхнего слоя донных осадков морских акваторий и устройство для его осуществления

