Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Вид РИД
Изобретение
Изобретение относится к радиолокационной технике и может быть использовано в тренажерах подготовки операторов радиолокационных станций, а также для функционально-диагностического контроля радиолокационных систем.
Известен способ имитации траекторий движения воздушных объектов [1], который осуществляется путем ручного ввода начальных полярных координат объекта в виде пеленга П0, дальности d0, курса kоб и начальной скорости νоб и последующего автоматического формирования траектории движения в виде отрезка прямой, исходящего из точки (П0; d0) в направлении kоб. Сигнал к началу маневра (поворота) поступает синхронно с вводом нового курса движения kоб и скорости объекта νоб к моменту выхода на новый курс. В результате выполняется имитация поворота путем сопряжения двух прямолинейных разнонаправленных участков движения дугой окружности, радиус которой определяется скоростью изменения курса ωк, которая также задается в момент начала маневра.
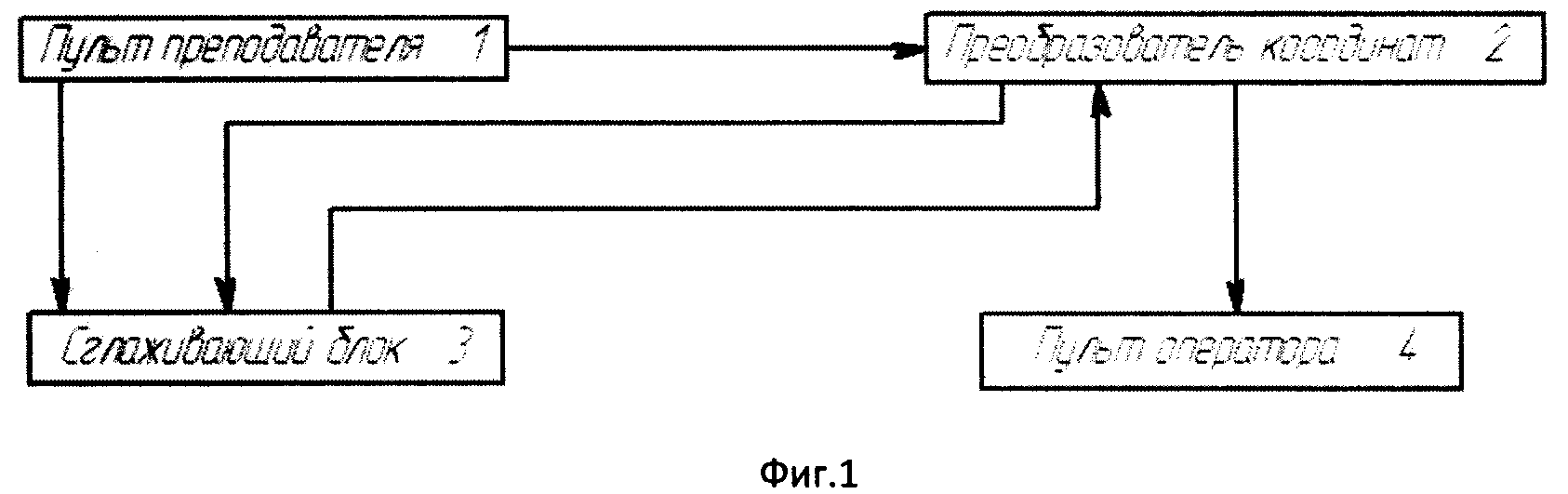
Данный способ осуществляется в известном устройстве тренажера (фиг.1) операторов РЛС [1], содержащем пульт преподавателя 1; предназначенный для набора параметров движения объекта в виде цифровых кодов, первый выход которого соединен с первым входом преобразователя координат 2, предназначенного для вычисления текущих координат при имитации движения воздушного объекта, а второй выход - с первым входом сглаживающего блока 3, превращающего скачки курса и скорости движущегося объекта в плавное движение по дуге окружности, второй вход которого соединен с первым выходом преобразователя координат 2, выход сглаживающего блока 3 соединен со вторым входом преобразователя координат 2; второй выход преобразователя координат 2 соединен со входом пульта оператора 4 со встроенным выносным панорамным индикатором для слежения и вычисления координат объекта.
Известному способу присущи следующие два основных недостатка. С одной стороны, это нереальная имитация траектории движения с учетом кинематики маневра воздушного объекта, когда объект (его пилот) испытывает мгновенное воздействие перегрузки вследствие скачка центробежной силы Fц=mυ2/R, (m и υ - соответственно масса и скорость воздушного объекта), который неизбежно возникает при переходе с траектории движения по прямой с радиусом кривизны R→∞ на траекторию движения с конечным радиусом Rокр. С другой стороны, имитируемая траектория является плоскостной кривой, все точки которой расположены на некоторой условно заданной высоте над поверхностью земли, что не характерно для реальных полетов воздушных объектов в трехмерном пространстве.
Недостатком устройства тренажера является также приблизительное задание значений параметров движения по переходной кривой и ограниченные точностные возможности наложения на первичную радиолокационную обстановку вторичной имитируемой информации.
Известен способ имитации траекторий движения воздушных объектов, в котором производится автоматический расчет уравнений движения по трем координатам x(t), y(t), z(t) и скорости ϑ(t) непосредственно после ввода исходных данных на рабочем месте оператора с последующей передачей коэффициентов указанных уравнений в блок расчета координат, в котором в ответ на запрос информации о текущем положении объекта вычисляются его декартовы координаты путем подстановки параметра времени t в уравнения движения, соответствующие преодолеваемому в момент t участку траектории, для чего траектория движения воздушного объекта представляется состоящей из элементарных сегментов в виде отрезков прямых, сопряжение которых при значении угла между ними φ<90° производится с исключением скачков скорости и ускорения согласующими участками в виде дуги окружности и двух сегментов кубических парабол, на которых радиус кривизны Rк плавно меняется от бесконечного в точках стыка с прямолинейными участками до радиуса согласования Rс в точках стыка с участком в виде дуги окружности или с исключением участка в виде дуги окружности при значении угла между согласуемыми отрезками прямых φ≥90° по параметрическим уравнениям, вычисленные в блоке расчета координат декартовы координаты воздушного объекта в момент времени t конвертируются затем в полярные в преобразователе координат [2].
Недостатком данного способа являются малые функциональные возможности при тренировке операторов, поскольку не обеспечивается формирование параметров и моделей воздушных объектов как источников вторичного излучения, например, в виде эффективной отражающей поверхности объекта (ЭПР), связанной с их отражающей способностью к излучению РЛС S и затуханием мощности отраженного эхосигнала А(Д) в зависимости от расстояния Д воздушного объекта до РЛС. В имитируемых воздушных объектах отсутствуют каналы вторичной радиолокации, обеспечивающие получение о них дополнительной информации, например, запас топлива, признаки опознавания государственной принадлежности (ОГП), номер борта (NB) и т.д.
Отсутствует имитация дополнительных параллельных парциальных каналов приема информации о воздушных объектах, например при использовании многолепестковых ДНА по углу места, а также канала обработки информации по боковым лепесткам ДНА.
Отсутствует имитация доплеровских частот, определяемых радиальными скоростями воздушных объектов, задание программы обзора РЛС пространства и формы диаграммы направленности антенны по азимуту β и углу места, формирование различного вида активных и пассивных помех, шумов приемных каналов, отражений от распределенных объектов, метеообразований, привязка и модуляция имитируемой воздушной обстановки к единому времени, текущему обзору пространства РЛС, введение режима с наложением имитируемой воздушной обстановки на реальную обстановку в процессе контроля воздушного пространства и тренировки операторов.
Указанные недостатки препятствуют полной имитации воздушной обстановки и использованию имитируемых сигналов воздушной обстановки в качестве тестовых эталонных воздействий при функционально-диагностическом контроле систем РЛС.
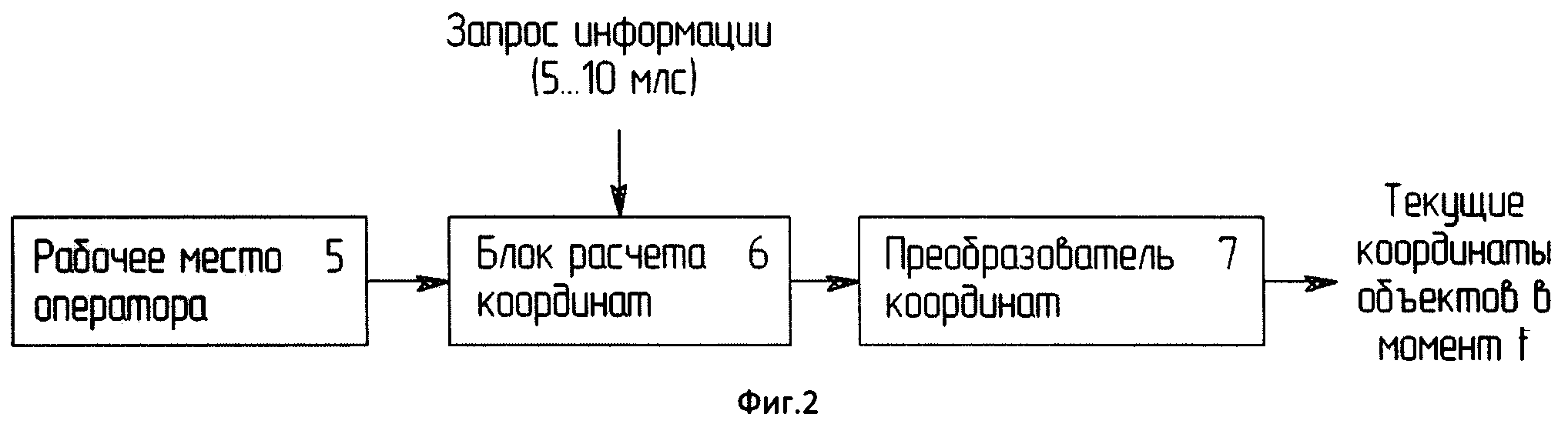
Данный способ осуществляется в известном устройстве имитации траекторий движения воздушных объектов (фиг.2), состоящем из рабочего места оператора 5, в котором производится автоматический расчет уравнений движения по трем координатам x(t), y(t), z(t) и скорости v(t) непосредственно после ввода исходных данных на рабочем месте оператора с последующей передачей коэффициентов указанных уравнений в блок расчета координат 6, в котором в ответ на запрос информации о текущем положении объекта вычисляются его декартовы координаты, которые в преобразователе координат 7 в момент времени t конвертируются в полярные [2].
Недостатком данного устройства являются малые функциональные возможности при тренировке операторов, поскольку не обеспечивается формирование параметров воздушных объектов как источников вторичного излучения, например, в виде эффективной отражающей поверхности объекта (ЭПР) и моделей, связанных с их отражающей способностью к излучению РЛС S и затуханием мощности отраженного эхосигнала А(Д) в зависимости от расстояния Д воздушного объекта до РЛС. В воздушных объектах отсутствуют каналы вторичной радиолокации, обеспечивающие получение о них дополнительной информации, например, запас топлива, признаки государственной принадлежности и т.д. Отсутствуют имитация дополнительных параллельных парциальных каналов приема информации о воздушных объектах, например, при использовании многолепестковых ДНА по углу места, а также канала обработки информации по боковым лепесткам ДНА, имитация доплеровских частот, определяемых радиальными скоростями воздушных объектов, рабочими частотами РЛС и моделями зондирующих и отраженных сигналов.
Не предусмотрены: задание программы обзора пространства РЛС и формы диаграммы направленности антенны по азимуту β и углу места; формирование различного вида активных и пассивных помех, шумов приемных каналов, отражений от распределенных объектов, метеоборазований; привязка имитируемой воздушной обстановки к единому времени, текущему обзору пространства РЛС; отсутствует режим с наложением имитируемой воздушной обстановки на реальную обстановку в процессе контроля воздушного пространства и тренировки операторов.
Указанные недостатки препятствуют полной имитации реальной воздушной обстановки и использованию имитируемых сигналов воздушной обстановки в качестве тестовых эталонных воздействий при функционально-диагностическом контроле систем РЛС.
Предлагаемым изобретением решаются задачи расширения функциональных возможностей устройства имитации траекторий движения воздушных объектов, формирования в реальном масштабе времени комплексных текущих эхо-сигналов с выхода приемного канала с привязанными к воздушным объектам поставщиками различного вида помех, точечных и распределенных объектов, шумов приемного тракта с наложением или без наложения на реальную воздушную обстановку имитируемых сигналов, обеспечение функционально-диагностического контроля систем РЛС, модуляции имитируемых эхо-сигналов в зависимости от отражающей поверхности воздушных объектов, их затухания в функции дальности от точки расположения и текущих угловых координат сканирования воздушного пространства антенной системы РЛС, имитации доплеровских частот, определяемых радиальными скоростями воздушных объектов, рабочими частотами РЛС и моделями зондирующих и отраженных эхо-сигналов, имитации активных каналов вторичной радиолокации.
Для достижения технического результата в способе имитации воздушной обстановки путем ручного ввода координат опорных точек траектории движения воздушных объектов, с указанием скоростей полета в этих точках, допустимых перегрузок и автоматического расчета уравнений движения по трем координатам x(t), y(t), z(t) и скорости ϑ(t) непосредственно после ввода исходных данных на рабочем месте оператора с последующей передачей коэффициентов указанных уравнений в блок расчета координат, в котором в ответ на запрос информации о текущем положении объекта вычисляются его декартовы координаты путем подстановки параметра времени t в уравнения движения, соответствующие преодолеваемому в момент t участку траектории, для чего траектория движения воздушного объекта представляется состоящей из элементарных сегментов в виде отрезков прямых, сопряжение которых при значении угла между ними φ<90° производится с исключением скачков скорости и ускорения согласующими участками в виде дуги окружности и двух сегментов кубических парабол, на которых радиус кривизны Rк плавно меняется от бесконечного в точках стыка с прямолинейными участками до радиуса согласования Rс в точках стыка с участком в виде дуги окружности или с исключением участка в виде дуги окружности при значении угла между согласуемыми отрезками прямых φ>90° по параметрическим уравнениям, вычисленные в блоке расчета координат декартовы координаты воздушного объекта в момент времени t конвертируются затем в полярные в преобразователе координат, дополнительно для введенных воздушных объектов задаются их дополнительные характеристики и модели как для источников вторичного излучения, активных каналов вторичной радиолокации, обеспечивающими получение дополнительной информации об воздушных объектах, во временных интервалах имитации воздушной обстановки вводят параметры, характеризующие воздушные объекты, как источники различного вида помех, задают функцию ослабления энергии отраженного эхо сигнала Aк(Д) на трассе распространения до воздушного объекта и обратно.
Задают сцену поверхности земли со слоями рельефа и (или) растительности в виде точечных и распределенных объектов с моделью физического радиосигнала, являющегося суммой парциальных эхо-сигналов элементов сцены.
Задают аналитически или таблично по основному и боковым лепесткам диаграмму направленности антенны (ДНА) в азимутальной плоскости, например, в табличной форме в виде пар значений: угол φ, коэффициент направленного действия (КНД), где КНДд в азимутальной плоскости является функцией симметричного рассогласования от аргумента угла φ положения максимума главного лепестка ДНА АА(φ)=max при φ=0, задают ДНА в угломестной плоскости ДНАу в виде одного или i лепестков для i парциальных угломестных каналов одновременного приема информации как функции рассогласования КНДу; в угломестной плоскости от аргументов углов αi пронумерованных i положений главных лепестков ДНА Ау(αi)=max при αi=0, задают параметры обзора пространства в азимутальной и угломестной плоскостях, формирования кодограммы единого времени, текущих координат обзора пространства, например, в сферической системе координат в виде текущего углового положения главного лепестка диаграммы направленности антенны радиолокационной станции при сканировании воздушного пространства в азимутальной и угломестной плоскостях с привязкой их к соответствующим отметкам «Север» или 0°, «Земля» и (или) нулевая линия горизонта, задают параметры для формирования физического эталона текущей дальности обзора пространства с нулевой дальности, соответствующей точке стояния и зондирующему импульсу начала рабочей дистанции (НРД) РЛС. Вводят рабочие частоты РЛС и модели зондирующих и отраженных эхосигналов для определения по радиальным скоростям воздушных объектов дискретного набора частот Доплера и соответствующей каждой из них ближайшей модели со сдвигом спектра частоты имитируемого сигнала.
Сформированный на рабочем месте оператора файл определения воздушной обстановки ФОВО обеспечивает имитацию воздушной обстановки в соответствии со следующими синхронными этапами и процессами: формируют кодограммы единого времени, текущие координаты обзора пространства, текущие периодические запросы для воспроизведения текущего состояния воздушной обстановки, формируют из пачки отметок дистанции, привязанной к НРД, текущий линейно-нарастающий код дальности обзора пространства с элементом разрешения по дальности, например, 125 м, соответствующим временным дискретом 0,833 мкс, обеспечивающие пространственную временную развертку и отображение информации в зоне ответственности РЛС в соответствии с заданной программой обзора пространства. В хронизаторе единого времени и текущих координат обзора пространства имитируется сложный зондирующий сигнал передатчика с большой базой и внутриимпульсной линейно - частотной модуляцией.
После определения по текущему запросу сферических координат воздушных объектов производится определение амплитуд эхо-сигналов в функциях дальности в виде произведений Sk Ak (Д), где Sk - эффективная отражающая поверхность K-ого воздушного объекта, Ak(Д) характеризует затухание сигнала в зависимости от расстояния Дк воздушного объекта до РЛС, определяются радиальные скорости воздушных объектов и соответствующие им частоты Доплера, формируются кодограммы с параметрами воздушных объектов и имитируемыми помехами, в которых для каждого воздушного объекта проверяется время начала и конца формирования активных шумовых и других помех, в кодограмму в соответствии с ФОВО вводятся параметры характеризующие объекты как объекты с активными каналами вторичной радиолокации, обеспечивающие получение о них дополнительной информации, формируют сигналы имитации шумов приемных каналов РЛС, помех.
Распределяют и (или) передают сформированные кодограммы эхо-сигналов воздушных объектов в соответствии с их текущими координатами в N1…Nn пространственных параллельных парциальных каналах формирования комплексных сигналов в соответствии с алгоритмами работы параллельных приемных каналов, обрабатывающих информацию от соответствующих антенных систем РЛС, работающих на прием.
Осуществляют модуляцию выражений Sk Ak(Д) на коэффициенты модуляции AA(φ) и Ау(φ), определяемые формой диаграммы направленности антенны в соответствии с коэффициентами направленного действия AA(φ) азимутом γk воздушного объекта и угловым положением антенны β: например, для азимутального сканирования Sрк=SкАк(Д) AA(β-γk).
По рассчитанной частоте Доплера воздушного объекта выбирают ближайший, соответствующий ей номер доплеровского канала и формируют ответный эхо-сигнал воздушного объекта со сдвигом спектра, соответствующим заданной модели и модели сложного зондирующего сигнала РЛС с внутриимпульсной модуляцией.
Производят упорядоченную последовательную запись сформированных кодограмм комплексных эхо-сигналов о воздушной обстановке для каждого из приемных каналов в приемное оперативное запоминающее устройство обмена данными и последующей выдачей данных через коммутаторы - смесители в порядке очередности их поступления с привязкой к внешней хронизации по единому времени, текущим углам обзора пространства антенной, началу рабочей дальности РЛС и дискретному изменению текущей дальности обзора пространства с элементом разрешения по дальности, например, 125 м, соответствующим дискретом 0,833 мкс следования опросных импульсов выдачи информации в виде пачки отметок дистанции.
Предусмотрен режим совмещенной работы, в котором по команде с рабочего места оператора осуществляется синхронное совмещение первичной информации, формируемой в зоне ответственности РЛС, с имитируемой воздушной обстановкой в коммутаторах-смесителях сигналов с исключением имитации шумов приемного канала.
В совмещенном режиме работы при наложении на первичную информацию в реальном масштабе времени с выходов приемных каналов РЛС вторичной для совмещения и синхронизации имитируемой информации с первичной информацией имитируемые кодограммы синхронизации в виде единого времени, текущих координат обзора пространства и запросов для воспроизведения воздушной обстановки по команде с рабочего места оператора переключают на соответствующие рабочие кодограммы с РЛС, одновременно производится исключение имитации шумов приемных каналов РЛС в имитаторе.
Для воздушных объектов как для источников вторичного излучения, вводятся значения эффективной отражающей поверхности S, например, дискретные, при этом Sк∈[0,001;100] м2.
Для воздушных объектов как для источников вторичного излучения, вводятся цифровые модели вторичного излучения учитывающие статику и динамику движения целей и их элементов.
Для воздушных объектов, имеющих активные каналы вторичной радиолокации, вводятся параметры начального количества топлива, %, сигналы бедствия, опознавание государственной принадлежности.
Формируются активные шумовые помехи.
Формируются активные несинхронные помехи и активные синхронные помехи.
При формировании распределенных объектов указываются их размеры по азимуту, углу места и дальности.
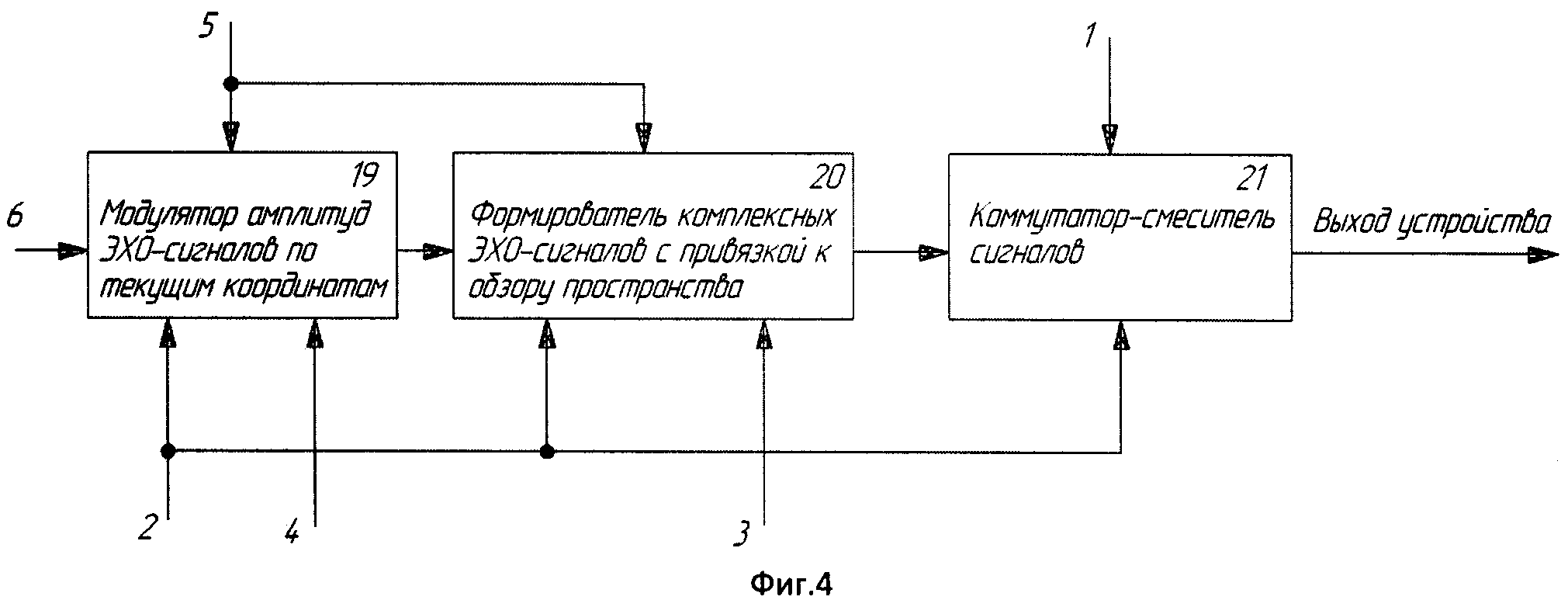
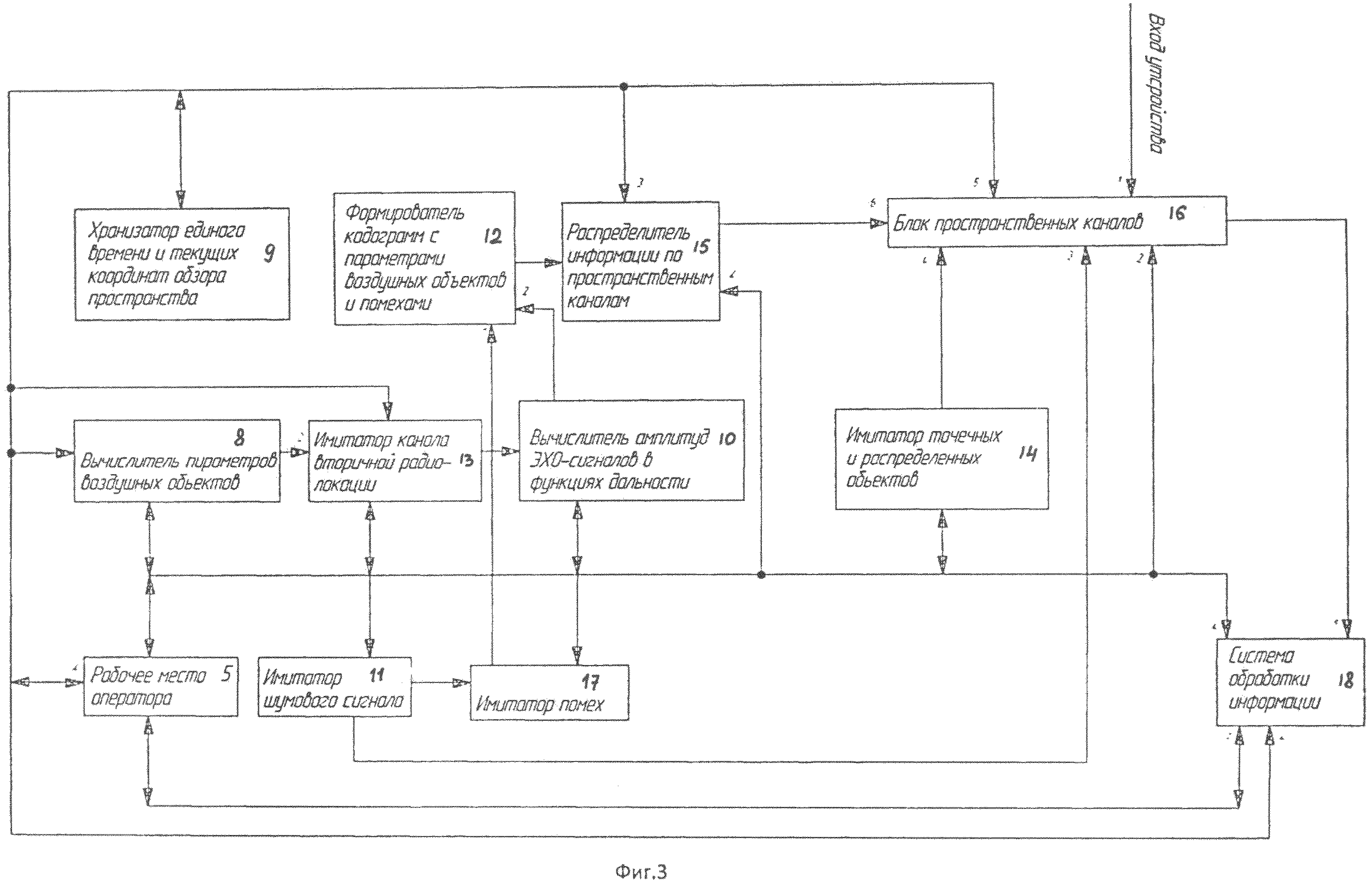
Предлагаемый способ имитации радиолокационной информации осуществляется в предлагаемом устройстве, которое, как и наиболее близкое к нему (фиг.2), содержит рабочее место оператора. В отличие от известного в предлагаемое устройство дополнительно введены вычислитель амплитуд эхо-сигналов в функциях дальности, имитатор шумового сигнала, имитатор помех, хронизатор единого времени и текущих координат обзора пространства, формирователь кодограмм с параметрами воздушных объектов и помехами, имитатор точечных и распределенных объектов, система обработки информации, вычислитель параметров воздушных объектов, имитатор канала вторичной радиолокации, распределитель информации по пространственным каналам, блок пространственных каналов, который состоит из одного или нескольких N1…Nn каналов, каждый из которых включает модулятор амплитуд эхо-сигналов по текущим координатам, формирователь комплексных эхо-сигналов с привязкой к обзору пространства и коммутатор-смеситель сигналов.
Предлагаемое устройство имитации радиолокационной информации иллюстрируется чертежами, представленными на фиг.3, фиг.4.
Устройство имитации радиолокационной информации содержит рабочее место оператора 5, вычислитель амплитуд эхо-сигналов в функциях дальности 10, имитатор шумового сигнала 11, имитатор помех 17, хронизатор единого времени и текущих координат обзора пространства 9, формирователь кодограмм с параметрами воздушных объектов и помехами 12, имитатор точечных и распределенных объектов 14, систему обработки информации 18, вычислитель параметров воздушных объектов 8, имитатор канала вторичной радиолокации 13, распределитель информации по пространственным каналам 15, блок пространственных каналов 16, который состоит из одного или нескольких N1…Nn каналов, каждый из которых включает модулятор амплитуд эхо-сигналов по текущим координатам 19, формирователь комплексных эхо-сигналов с привязкой к обзору пространства 20 и коммутатор-смеситель сигналов 21 (фиг.4).
Рабочее место оператора 5 выполняет и функции рабочего места инструктора, при этом вход устройства соединен с первым входом блока пространственных каналов 16, второй вход блока пространственных каналов 16 соединен с третьим входом-выходом рабочего места оператора 5, третий вход блока пространственных каналов 16 соединен со вторым выходом имитатора шумового сигнала 12, четвертый вход блока пространственных каналов 16 соединен с выходом имитатора точечных и распределенных объектов 14, пятый вход блока пространственных каналов 16 соединен с входом-выходом хронизатора единого времени и текущих координат обзора пространства 9, шестой вход блока пространственных каналов 16 соединен с выходом распределителя информации по пространственным каналам 15, а выход блока пространственных каналов 16 соединен с первым входом системы обработки информации 18, четвертый вход которой соединен с входом-выходом вычислителя параметров воздушных объектов 8, а второй вход соединен с входом-выходом хронизатора единого времени и текущих координат обзора пространства 9, третий вход-выход системы обработки информации 18 соединен с первым входом-выходом рабочего места оператора 5, второй вход-выход которого соединен с входом-выходом хронизатора единого времени и текущих координат обзора пространства 9, а третий вход-выход соединен с входом имитатора шумового сигнала 11, вторым входом имитатора помех 17, вторым входом распределителя информации по пространственным каналам 15, входом-выходом имитатора точечных и распределенных объектов 14, входом-выходом имитатора канала вторичной радиолокации 13, входом-выходом вычислителя амплитуд эхо-сигналов в функциях дальности 10, входом-выходом вычислителя параметров воздушных объектов 8, вход которого соединен с входом-выходом хронизатора единого времени и текущих координат обзора пространства 9, а выход соединен со вторым входом имитатора канала вторичной радиолокации 13, первый вход которого соединен с входом-выходом хронизатора единого времени и текущих координат обзора пространства 9, выход имитатора канала вторичной радиолокации 13 соединен с входом вычислителя амплитуд эхо-сигналов в функциях дальности 10, выход которого соединен со вторым входом формирователя кодограмм с параметрами воздушных объектов и помехами 12, первый вход которого соединен с выходом имитатора помех 17, а выход соединен с первым входом распределителя информации по пространственным каналам 15, третий вход которого соединен с входом-выходом хронизатора единого времени и текущих координат обзора пространства 9, первый выход имитатора шумового сигнала 11 соединен с первым входом имитатора помех 17.
Вычислитель параметров воздушных объектов 8 и другие блоки, например, 10, 13, 15 реализуются, например, на основе процессоров 1892 ВМ2Т производства ГУП НПЦ «ЭЛВИС» [2]. Для их программирования использовался язык ассемблер, операционная система Windows 98/98SE/NT/2000/XP [3, 4]
Устройство имитации радиолокационной информации работает следующим образом.
Инструктор вручную на рабочем месте оператора 5 задает сценарий воздушной обстановки [2, 3, 4]. Отображение воздушной (радиолокационной) обстановки в зоне ответственности РЛС и управление системами и режимами работы РЛС на экране монитора рабочего места оператора 5 осуществляется с помощью графических интерфейсов и электронного меню. Формирование сценария воздушного налета, управление работой монитора также осуществляются с помощью электронного меню и штатных устройств ввода специализированной ЭВМ (СЭВМ) - трекбола, клавиатуры рабочего места оператора 5.
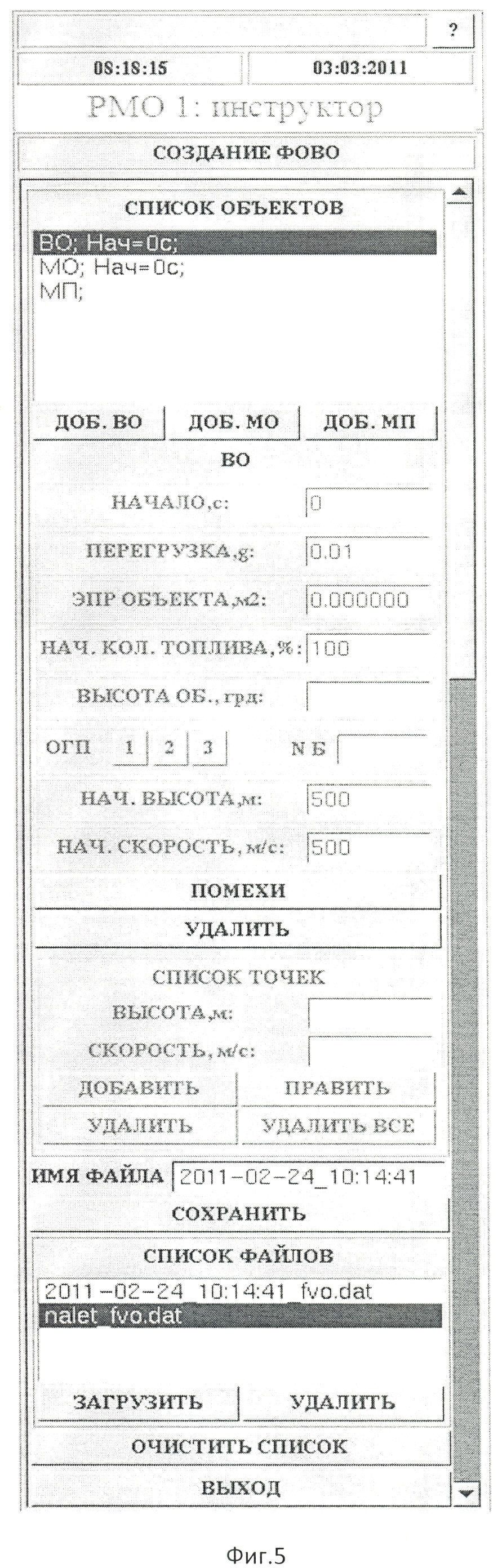
Таким образом, инструктор вручную через наглядный пользовательский интерфейс задает сценарий воздушной обстановки [2, 3, 4]. Основой в сценарии воздушной обстановки являются имитируемые воздушные объекты и траектории их движения. Каждая из траекторий и объект описываются следующими параметрами: время появления имитируемого объекта начало с (Нач=Ос); модель объекта как источник вторичного излучения и (или) эффективная отражающая поверхность (ЭПР) объекта, м2 (Sk); максимальная переносимая перегрузка в числах ускорения свободного падения  (перегрузка, g: …) и т.д. (фиг.5). Модели объектов, как источников вторичного излучения приведены, например, в [5, стр.102, 115].
(перегрузка, g: …) и т.д. (фиг.5). Модели объектов, как источников вторичного излучения приведены, например, в [5, стр.102, 115].
Траектория полета воздушного объекта задается набором опорных вершин {Mn(xn,yn,zn)} ломаной линии, очерчивающей траекторию движения воздушного объекта.
Ввод точек Mn, начальных скоростей движения в этих точках осуществляется средствами человеко-машинного интерфейса на экране индикатора кругового обзора в естественном для оператора виде {Mn(xn,yn.hn)} с привязкой к прямоугольной системе координат, когда в качестве третьей координаты удобно задавать высоту hn воздушного объекта над поверхностью Земли.
В рабочем месте оператора 5 производится автоматический расчет уравнений движения воздушного объекта по трем координатам x(t), y(t,), z(t) [2; 4].
Сформированный оператором налет, состоящий из нескольких (до 200) траекторий движения воздушных объектов, с привязанными к ним параметрами и моделями как источников вторичного излучения, активных каналов вторичной радиолокации, обеспечивающими получение дополнительной информации о воздушных объектах, помехах и т.д, записывается в файл определения воздушной обстановки [5, стр.412]. Работу с файлами обеспечивает разработанная программа ввода информации и имитации воздушной обстановки для СЭВМ рабочего места оператора 5. Управление файлами осуществляется посредством электронного меню. Создание файла определения воздушной обстановки (ФОВО) производится в соответствии с составом иерархии электронного меню в СЭВМ рабочего места оператора 5. При нажатии программной кнопки «Создание ФОВО» вызывается первое подменю (фиг.5), предназначенное для задания воздушной обстановки на экране системы отображения и формирования файла определения воздушной обстановки.
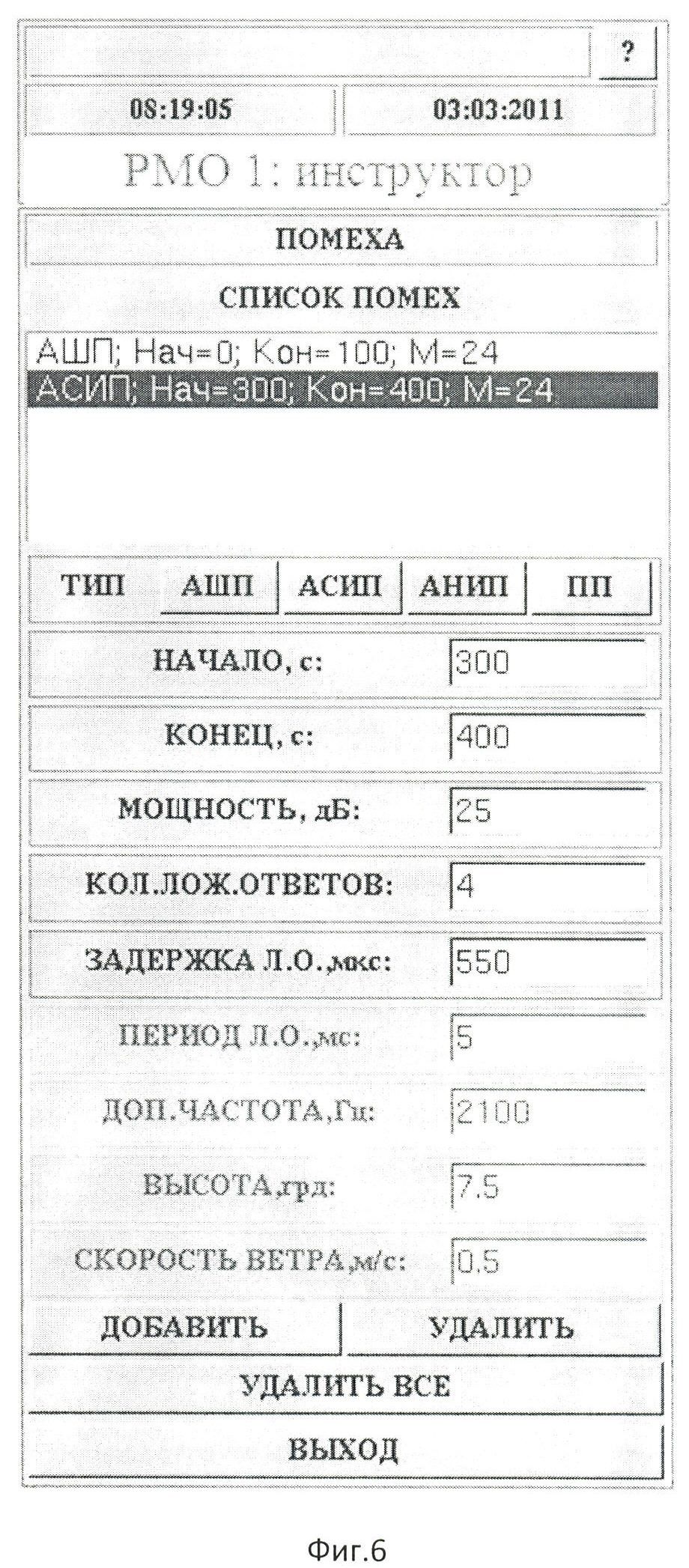
Активные шумовые помехи (АШП), активные синхронные и несинхронные импульсные помехи (АСИП, АНИП), пассивные помехи (ПП), привязанные к конкретным воздушным объектам, задаются с помощью подменю «ПОМЕХА» и т.д. (фиг.6).
Исходные данные для формирования точечных и распределенных объектов также задаются на экране монитора рабочего места оператора 5. Координаты центров объектов задаются в плоскостной (прямоугольной) системе координат в зоне ответственности РЛС. Для распределенных объектов в полярной системе координат задаются в двоичных кодах линейные и угловые размеры, например, с ценой деления младшего разряда по дальности 125 м и азимуту  , аналогично задаются размеры по углу места.
, аналогично задаются размеры по углу места.
Производится загрузка, аналитически или таблично, диаграмм направленности антенны (ДНА), например, в азимутальной плоскости в табличной форме в виде пар значений: угол φ, коэффициент направленного действия (КНД). КНД является функцией симметричного рассогласования от аргумента угла ср положения максимума главного лепестка ДНА AA(φ)=max при φ=0. Вводится также программа обзора пространства РЛС, которая, в частности, включает задание скорости сканирования антенны по угловым координатам с определением характеристик физических эталонов единого времени и датчиков-имитаторов азимута, угла места и текущей дальности обзора пространства, параметров сложного зондирующего сигнала передатчика с большой базой и с внутриимпульсной линейно-частотной модуляцией.
Сформированный ФОВО в виде параметрически представленных уравнений траекторий движения воздушных объектов в функции времени t, привязанных к ним с заданными параметрами постановщиков активных и пассивных помех, вспомогательных сигналов, различного вида метеообразований, местных предметов и т.д. в виде кодограмм по стандартным интерфейсам передается через СЭВМ рабочего места оператора 5 на модули устройства имитации радиолокационной информации для задания алгоритмов их работы.
После передачи информации о формируемом воздушном налете (ФОВО) рабочее место оператора 5 перестает выполнять функции рабочего места инструктора и с целью унификации, экономии аппаратуры оно начинает функционировать в качестве рабочего места оператора с отображением воздушной обстановки в полярной системе координат в зоне ответственности РЛС [3-6].
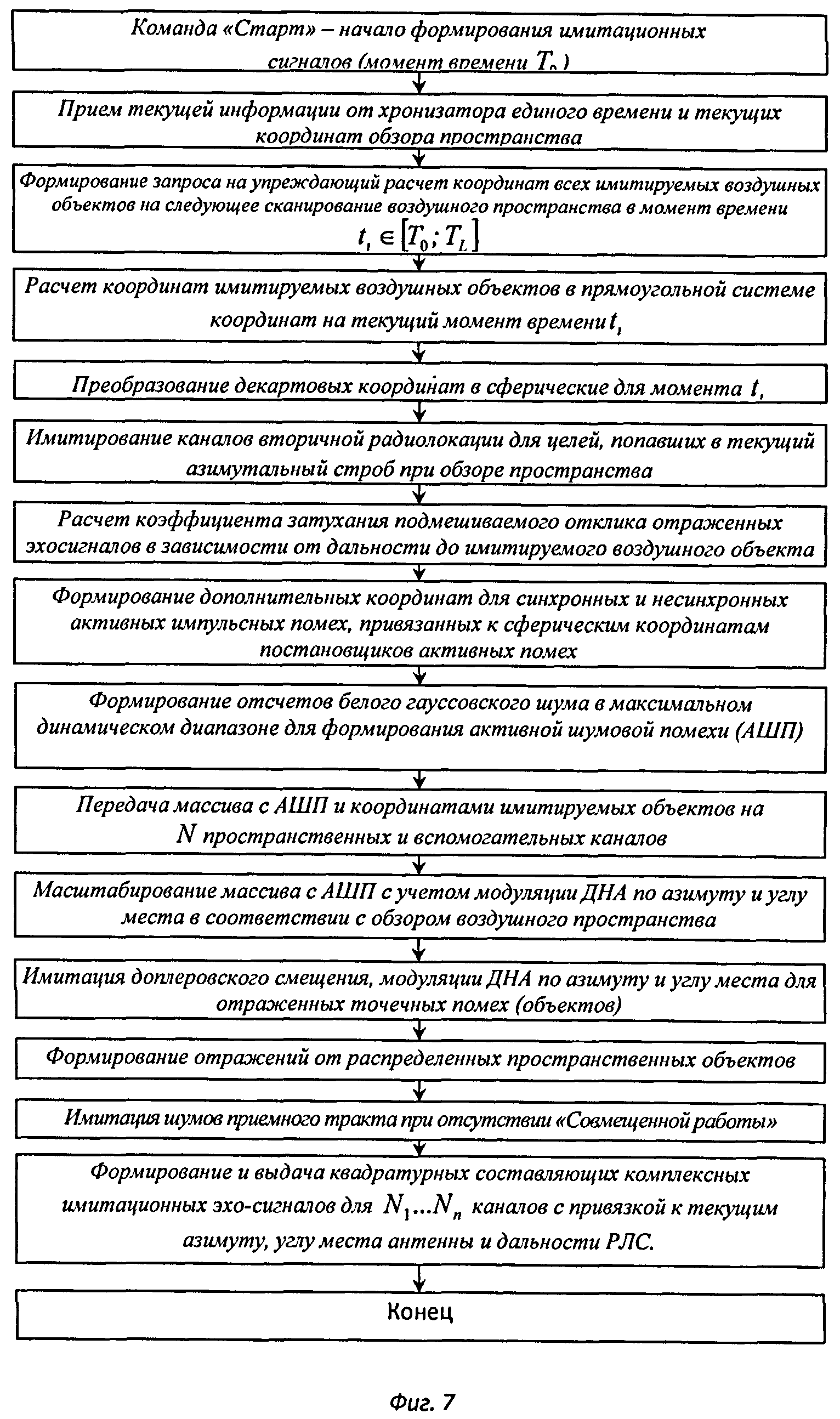
Упрощенный вариант алгоритма работы устройства в режиме имитации воздушной обстановки представлен на фиг.7. Имитация подготовленного сценария воздушной обстановки начинается по команде «Старт» с рабочего места оператора в момент времени T0 и продолжается в интервале t∈[T0;TL].
Хронизатор единого времени и текущих координат обзора пространства осуществляет формирование текущей информации и запроса на расчет координат.
В соответствии с переданными с рабочего места оператора 5 уравнениями движения воздушных объектов по трем координатам x(t), y(t), z(t), в вычислителе параметров воздушных объектов 8 периодически в ответ на запросы информации о текущем положении объектов из хронизатора единого времени и текущих координат обзора пространства 9 вычисляются их декартовы и сферические координаты путем подстановки параметра времени t в уравнения движения, соответствующие преодолеваемому в момент времени t участку траектории.
Вычислитель амплитуд эхо-сигналов в функциях дальности 10 осуществляет вычисление произведений Sk Ak(D), где Sk - эффективная отражающая поверхность k-ого воздушного объекта, Ak(D) - затухание сигнала в зависимости от расстояния D воздушного объекта до РЛС. Производится расчет радиальных скоростей объектов и частот Доплера в соответствии с выражением Fg=2Vp/λ, где λ - длина рабочей волны передатчика. Частота Fg в дальнейшем определяет ближайший номер доплеровского канала с соответствующим сдвигом спектра частоты в модели при замешивании отраженного эхо-сигнала, в комплексный эхо-сигнал в формирователе комплексных эхо-сигналов с привязкой к обзору пространства 20.
К заданным воздушным объектам в имитаторе канала активной вторичной радиолокации 13 привязываются их соответствующие признаки, определенные в ФОВО. Имитатор канала активной вторичной радиолокации 13 предназначен для реализации стандартного протокола обмена информации с РЛС в объеме, достаточном для идентификации воздушного объекта, например, для его опознавания [5, стр.413]. Объектом обмена информации от РЛС в данном случае является система обработки информации 18. Предусмотрен режим автоматического опознавания по запросу от системы обработки информации для заданных воздушных объектов с активными каналами вторичной радиолокации.
Рассчитанные координаты воздушных объектов с амплитудами отраженных сигналов с учетом отражающей поверхности и удаленности отражающего объекта от места стояния РЛС частотами Доплера подаются в формирователь кодограмм с параметрами воздушных объектов и имитируемыми помехами 12, в котором для каждого воздушного объекта проверяется время начала и конца формирования активных шумовых, импульсных помех и т.д.
Например, при наступлении времени формирования активной шумовой помехи к кодограмме «Замес» с параметрами воздушного объекта в формирователе кодограмм с параметрами воздушных объектов и имитируемыми помехами 12 добавляются ложные сигналы определенной мощности, например, в виде отсчетов белого Гауссова шума, получаемого путем суммирования двенадцати шумов с равномерным законом распределения в имитаторе помех 17, помеха имеет ширину спектра, перекрывающую ширину спектра зондирующего сигнала. Сформированные кодограммы воздушных объектов в соответствии с их сферическими координатами в распределителе информации по пространственным каналам 15 разделяются на несколько пространственных каналов N1…Nn. Обработка информации в различных пространственных каналах осуществляется однотипно с применением ДНА, соответствующей конкретному пространственному каналу. Имитатор шумового сигнала 11 формирует шумы приемного тракта РЛС. Эти шумы формируются, например, из последовательности максимальной длины. Коэффициенты формирующего полинома записываются в память процессора имитации шумового сигнала 11. В совмещенном режиме работы замешивание шумов с имитатора шумового сигнала 11 в комплексный эхо-сигнал не производится.
Алгоритм работы и структура реализации процесса в имитаторе точечных и распределенных объектов 14 осуществляется исходя из того, что эти объекты не изменяют своего пространственного положения от периода к периоду зондирования РЛС. Модели распределенных объектов получают путем формирования цифровых карт с разбиением объекта на сумму элементов и интегрированием отражений от этих элементов с учетом их спектральных характеристик [5, стр.129, 133].
Соответствующий модулятор амплитуд эхо-сигналов по текущим координатам 19 блока пространственных каналов 16 по текущим имитируемым координатам точечных и распределенных объектов 14 осуществляет перемножение выражений Sk Ak(D) на коэффициент модуляции АА(φ), определяемый формой диаграммы направленности в соответствии с коэффициентом направленного действия AA(φ), азимутом γk воздушного объекта и угловым положением антенны β: например, в азимутальной плоскости Sрк=SkAk(Д)AA(β-γк).
После чего в формирователе комплексных эхо-сигналов с привязкой к обзору пространства 20 по определенной для воздушного объекта частоте Доплера выбирается соответствующий ближайший канал Доплера со своей моделью изменения спектра сложного зондирующего сигнала. Таких каналов для диапазона скоростей воздушных объектов от 50 км/час до 5000 км/час с соответствующими доплеровскими частотами сигналов от 0 до ±23 кГц с дискретом 1,5 кГц может быть реализовано порядка 30-ти.
На следующем этапе эхо-сигналы с амплитудами, промодулированными в соответствии с текущими координатами обзора пространства РЛС в виде полных пакетов информации о воздушной обстановке, упорядочение в порядке увеличения текущей дальности воздушных объектов записываются в приемное оперативное запоминающее устройство обмена данными типа «первый зашел - первый вышел» (FIFO). После чего производится выдача данных в порядке очередности их поступления с привязкой к внешней хронизации по единому времени, текущим углам обзора пространства антенной, началу рабочей дистанции РЛС и дискретному изменению текущего линейно-нарастающего кода дальности с элементом разрешения, например, 125 м, соответствующим дискретом 0,833 мкс выдачи информации из оперативного запоминающего устройства в виде пачки отметок дистанции.
Предусмотрено два режима работы устройства имитации радиолокационной информации. В первом режиме с формирователя комплексных эхо-сигналов с привязкой к обзору пространства 20 через коммутатор-смеситель сигналов 21 на систему обработки информации 18 РЛС выдается в реальном масштабе времени только имитируемая текущая радиолокационная информация, например, в виде 12-ти разрядных двоичных кодов (с учетом знака). Радиолокационная информация в виде комплексных имитационных сигналов формируется (имитируется) в соответствии с заданным ФОВО и выбранным методом и темпом обзора воздушного пространства антенной системой РЛС по азимуту, угломестным каналам и дальности в сферической системе координат РЛС во временном интервале воздушного налета.
Во втором совмещенном режиме работы в коммутаторе-смесителе сигналов 21 производится наложение вторичной имитируемой обстановки с выхода формирователя комплексных эхо-сигналов с привязкой к обзору пространства 20 на первичную воздушную обстановку с выхода приемника РЛС.
Команды переключения режимов работы на коммутатор-смеситель сигналов 21 и имитатор шумового сигнала 11 производятся с рабочего места оператора 5.
Во втором режиме по команде с рабочего места оператора 5 блокируется ввод сигналов имитации шумов приемника РЛС с выхода имитатора шумового сигнала 11 в формирователь комплексных эхо-сигналов с привязкой к обзору пространства 20.
Таким образом, устройство имитации радиолокационной информации обеспечивает выполнение наиболее трудоемких вычислительных операций в некритичном процессе ввода и подготовки инструктором сценариев воздушного налета, когда время реализации вычислений не является определяющим. Параметрические уравнения вычисления текущих прямоугольных координат движения воздушных объектов в функции времени t, численные методы воспроизведения сферических координат обеспечивают заданный темп формирования и ввода в сечения обработки информации РЛС имитационных потоков в соответствии с реальным темпом обзора пространства современных и перспективных РЛС [4]. Имитируемая информация для тренировки операторов в виде набора отметок, целей воспроизводит траектории движения воздушных объектов и т.д., одновременно представляет собой и эталонные тестовые воздействия для функционально-диагностического контроля систем РЛС, например, для формирования эталонных траекторий движения воздушных объектов.
Устройство имитации радиолокационной информации обеспечивает проведение измерений, исследование характеристик программно-аппаратных средств первичной, вторичной обработки информации РЛС, а также функционально-диагностический контроль подсистем обнаружения, измерения координат целей, формирования траекторий, входящих в систему обработки информации.
Литература
1) А.С. №991479. СССР Тренажер оператора локационных станций. А.В. Гусев. Опубл. 1983 г. Бюл. №3.
2) Патент №2419072 на изобретение «Способ имитации траекторий движения воздушных объектов», заявка №2009120762/28(028681) от 01.06.2009 г. Авторы: Чекушкин В.В., Бобров М.С., Аверьянов A.M.
3) Чекушкин В.В., Юрин О.В., Дударев В.А. Автоматизированная система управления радиолокационным комплексом. Приборы и системы. Управление. Контроль. Диагностика. 2004, №1, с.18-21.
4) Свидетельство №2009611848 от 16.02.2009 г. на программу для ЭВМ «Программа сглаживания траекторий движения воздушных объектов для радиолокационных систем управления» («Trajectory»), Авторы: Бобров М.С., Колпикова Е.С., Чекушкин В.В.
5) Радиоэлектронные системы: Основы построения и теория. Справочник. Изд. 2-е / под. ред. Я.Д. Ширмана. М.: Радиотехника, 2007 г. - 512 с.
6) Чекушкин В.В., Юрин О.В Реализация индикатора кругового обзора на дисплее с телевизионным растром. Радиотехника, 2002, №3, с.86-89.
Способ калибровки измерительных систем
Усилитель мощности свч
Коаксиально-полосковый переход
Устройство для вычисления функциональных зависимостей
Способ имитации траекторий движения объектов
Комбинированный способ стерилизации костных имплантатов
Способ калибровки измерительных систем
Усилитель мощности свч
Коаксиально-полосковый переход
Устройство для вычисления функциональных зависимостей
Способ имитации траекторий движения объектов
Комбинированный способ стерилизации костных имплантатов
Способ и система для контроля радиолокационной станции

