ПОЗИЦИОНЕР ПРИВОДНОГО МЕХАНИЗМА
Вид РИД
Изобретение
Изобретение относится к комплектующим пневмоприводов мембранного или поворотного типа систем автоматического регулирования или дистанционного управления технологическими процессами в химической промышленности, нефтехимических, нефтегазоперерабатывающих, нефтегазодобывающих и других производствах.
Основная функция позиционера - обеспечение соответствия между положением рабочего органа регулирующей арматуры и величиной входного сигнала, независимо от трения, гистерезиса и несбалансированных усилителей в пневмоприводе и арматуре.
Известен позиционер и метод его использования, включающий регулятор положения штока клапана, первый вход которого определяет заданное положение штока клапана, второй вход - текущее положение штока клапана, а выход связан с управляемым приводом, устройство обнаружения погрешности, связанное со вторым входом регулятора, устройство сравнения (Патент US 6512960, G05B 19/19, 2003).
Известен также регулятор положения, связанный пневматической линией с пневматическим приводом. Привод включает пусковой элемент предохранительного клапана и имеет электрическую шину питания для управления электропневмопреобразователем посредством коммутатора. Коммутатор регулируется схемой управления, связанной с шиной питания и установлен в регуляторе положения (Патент US 20060266966, F16K 31/02, 2006).
Наиболее близким к предполагаемому изобретению является позиционер приводного механизма, содержащий блок питания, блок расчета заданного положения штока, выход которого связан с первым входом регулятора положения штока, второй вход которого через преобразователь линейного перемещения в напряжение связан со штоком клапана, а выход регулятора - с первым входом регулятора давления, второй вход которого через пневмоэлектрический преобразователь связан с входом мембранного привода клапана и выходом электропневматического преобразователя, вход которого связан с выходом регулятора давления, при этом первый выход блока питания связан с входами питания блока расчета заданного положения штока, регулятора положения штока, преобразователя линейного перемещения, регулятора давления, пневмоэлектрического и электропневматического преобразователей, а второй выход блока питания связан с вторым входом питания электропневмопреобразователя (Патент РФ 2347951, F15B 9/03, 2009).
Недостатком прототипа является возможность возникновения колебательного переходного процесса или недостаточного быстродействия устройства при применении на различных типах приводных механизмов.
Задачей, на решение которой направлено настоящее изобретение, является улучшение качества управления положением клапана за счет устранения отмеченных недостатков.
Поставленная задача решается тем, что позиционер приводного механизма, содержащий блок питания, блок расчета заданного положения штока, выход которого связан с первым входом регулятора положения штока, второй вход которого через преобразователь линейного перемещения в напряжение связан со штоком клапана, а выход регулятора - с первым входом регулятора давления, второй вход которого через пневмоэлектрический преобразователь связан с входом мембранного привода клапана и выходом электропневматического преобразователя, вход которого связан с выходом регулятора давления, при этом первый выход блока питания связан с входами питания блока расчета заданного положения штока, регулятора положения штока, преобразователя линейного перемещения, регулятора давления, пневмоэлектрического и электропневматического преобразователей, а второй выход блока питания связан с вторым входом питания электропневмопреобразователя, согласно изобретению дополнительно содержит переключатель задания давления, первый вход которого связан с выходом регулятора положения, второй вход - с выходом таймера, первый выход связан с первым входом регулятора давления, второй выход - с первым входом блока анализа переменных, второй вход которого связан с выходом пневмоэлектрического преобразователя, третий вход - с выходом преобразователя линейного перемещения, а первый выход через таймер и блок расчета коэффициента интегрирования - с третьим входом регулятора положения, второй выход через блок расчета максимальных приращений переменных и блок расчета коэффициента пропорциональности с - четвертым входом регулятора положения, при этом первый выход блока питания связан с входами питания переключателя задания давления, таймера, блока анализа переменных, блоков расчета коэффициента интегрирования, максимальных приращений и коэффициента пропорциональности.
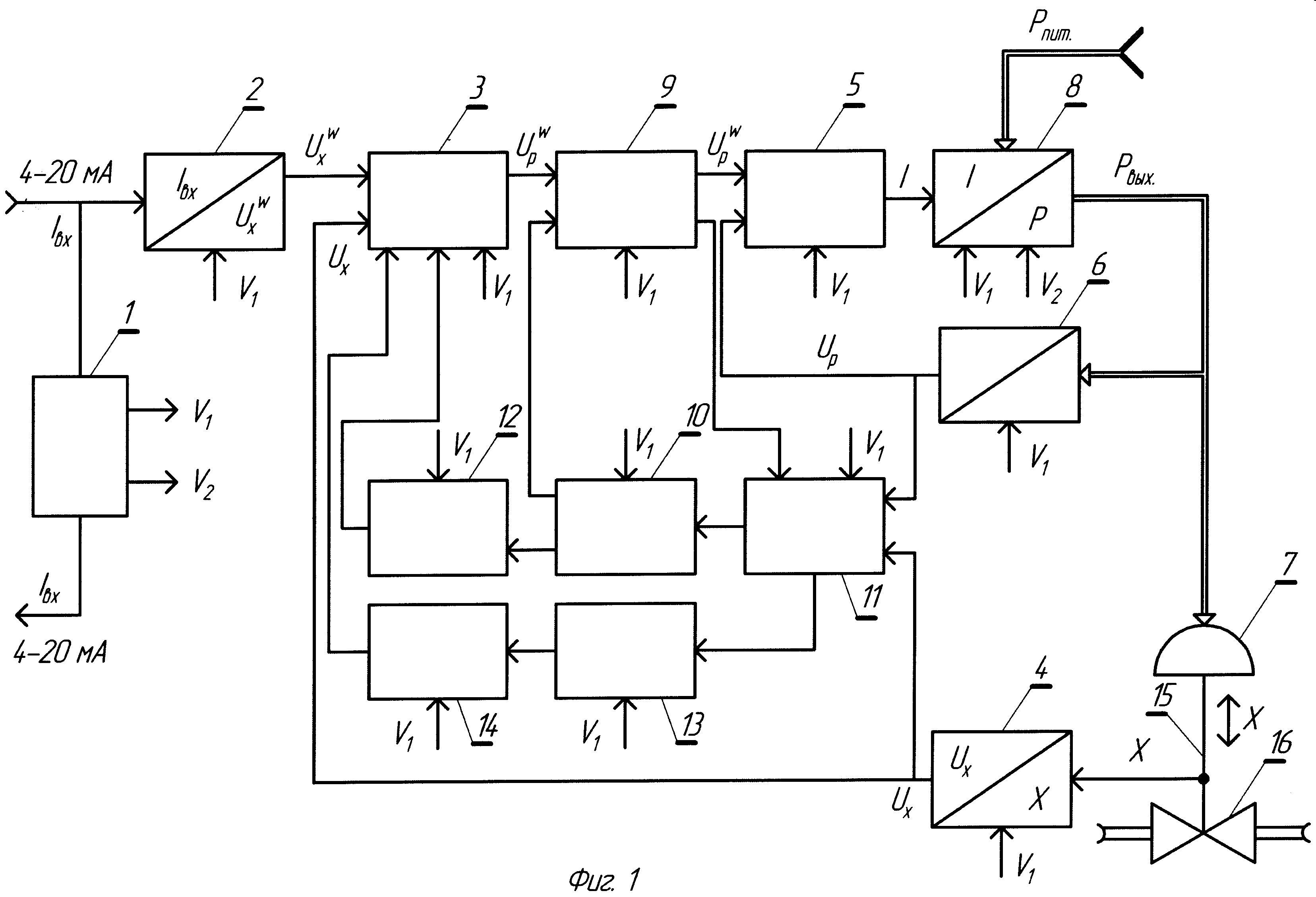
Изобретение поясняется фиг.1, где представлена блок-схема позиционера.
Позиционер содержит:
- 1 - блок питания,
- 2 - блок расчета заданного положения штока,
- 3 - регулятор положения штока,
- 4 - преобразователь линейного перемещения в напряжение,
- 5 - регулятор давления,
- 6 - пневмоэлектрический преобразователь,
- 7 - мембранный привод клапана,
- 8 - электропневматический преобразователь,
- 9 - переключатель задания давления,
- 10 - таймер,
- 11 - блок анализа переменных,
- 12 - блок расчета коэффициента интегрирования,
- 13 - блок расчета максимальных приращений,
- 14 - блок расчета коэффициента пропорциональности.
Для описания работы позиционера на фиг.1 указаны шток клапана 15 и регулирующий клапан 16.
Заявляемый позиционер приводного механизма работает следующим образом. Входные цепи позиционера подключаются по «токовой петле» диапазона 4-20 мА к внешнему регулятору технологического процесса. За счет падения напряжения на последовательно включенных входных резисторах осуществляется как измерение входного тока в блоке 2, так и формирование в блоке 1 напряжений питания уровнем в 3 и 50 вольт.
Напряжение 3 В подается на входы питания блока расчета заданного положения штока 2, регулятора положения штока 3, преобразователя линейного перемещения 4, регулятора давления 5 пневмоэлектрического 6 и электропневматического 8 преобразователей, переключатель задания 9, таймера 10, блока анализа переменных 11, блока расчета максимальных перемещений 13 и блоков расчета коэффициентов интегрирования 12 и пропорциональности 14.
Напряжение 50 В дополнительно подается на второй вход питания электропневмопреобразователя 8. Энергии «токовой петли» достаточно для питания всех элементов позиционера при уровне тока не менее 3,8 мА.
По величине входного тока в блоке 2 рассчитывается заданное (желаемое) положение штока регулирующего клапана 16 в процентах от диапазона перемещения в зависимости от вида клапана (НО - нормально открытый, НЗ - нормально закрытый) и типа его пропускной характеристики (линейная, равнопроцентная).
Заданное положение штока клапана Xзад затем преобразуется в сигнал электрического напряжения  , который поступает на первый вход регулятора положения штока 3 в качестве задания. На второй вход регулятора поступает в качестве переменной напряжение Ux, от преобразователя линейных перемещений 4, отслеживающего ход X штока 15 клапана 16.
, который поступает на первый вход регулятора положения штока 3 в качестве задания. На второй вход регулятора поступает в качестве переменной напряжение Ux, от преобразователя линейных перемещений 4, отслеживающего ход X штока 15 клапана 16.
Регулятор положения штока 3, исходя из сигнала заданного положения штока  и сигнала текущего положения штока Ux формирует управляющее воздействие
и сигнала текущего положения штока Ux формирует управляющее воздействие  по ПИ - закону регулирования
по ПИ - закону регулирования

где: КП - коэффициент пропорциональности;
КИ - коэффициент интегрирования.
Величина
в качестве текущего задания поступает на вход переключателя задания давления 9, в котором заданы величины минимального и максимального заданий  ,
,  . Переключатель при первом включении питания инициирует режим настройки коэффициентов КП, КИ (режим обучения). При этом регулятору давления 5 в качестве первого шага выдается минимальное задание
. Переключатель при первом включении питания инициирует режим настройки коэффициентов КП, КИ (режим обучения). При этом регулятору давления 5 в качестве первого шага выдается минимальное задание  и одновременно - инициализирующий сигнал на блок анализа переменных 11.
и одновременно - инициализирующий сигнал на блок анализа переменных 11.
Регулятор 5 по заданному давлению
и переменной величине Up, поступающей с выхода пневмоэлектрического преобразователя 6 устанавливает через электропневматический преобразователь 8 заданное управляющее давление воздуха,  поступающего на вход пневмоэлектрического преобразователя 6 и на мембранный исполнительный механизм 7, осуществляющий перемещение штока 15.
поступающего на вход пневмоэлектрического преобразователя 6 и на мембранный исполнительный механизм 7, осуществляющий перемещение штока 15.
Блок 11 фиксирует наступление установившегося режима по переменным давления Up и перемещения Uх, поступающих от пневмоэлектрического преобразователя 6 и преобразователя линейных перемещений 4 путем анализа их приращения. При  и
и  блок 11 посылает сигнал на включение таймера 10 и запоминания сигналов
блок 11 посылает сигнал на включение таймера 10 и запоминания сигналов  и
и  в блоке 13 (где
в блоке 13 (где  ,
,  - минимальные заданные значения приращений). Таймер 10 при поступлении сигнала фиксирует начало отсчета времени и инициирует работу переключателя 9, который в качестве второго шага выдает максимальное задание регулятору давления
- минимальные заданные значения приращений). Таймер 10 при поступлении сигнала фиксирует начало отсчета времени и инициирует работу переключателя 9, который в качестве второго шага выдает максимальное задание регулятору давления  и одновременно иницилизирующий сигнал на блок 11.
и одновременно иницилизирующий сигнал на блок 11.
Регулятор 5 при поступлении нового задания
через электропневматический преобразователь 6 устанавливает максимальный выходной сигнал  , поступающий на мембранный исполнительный механизм 7, который осуществляет максимальное перемещение Xmax штока клапана.
, поступающий на мембранный исполнительный механизм 7, который осуществляет максимальное перемещение Xmax штока клапана.
Блок 11 отслеживает наступление нового установившегося режима путем сравнения уровня приращений переменных Up и Ux с ограничениями  и
и  При его установке блок 11 посылает сигналы на таймер 10 и блок 13 на запоминание сигналов
При его установке блок 11 посылает сигналы на таймер 10 и блок 13 на запоминание сигналов  и
и  Таймер 10 по этому сигналу отключает отсчет времени, при этом накопленное время является временем перехода клапана из одного крайнего положения в другое Тпер. Одновременно таймер 10 иницилизирует работу переключателя 9 и блока 12.
Таймер 10 по этому сигналу отключает отсчет времени, при этом накопленное время является временем перехода клапана из одного крайнего положения в другое Тпер. Одновременно таймер 10 иницилизирует работу переключателя 9 и блока 12.
Блок 12 по информации о величине Tпер рассчитывает коэффициент интегрирования KИ по формуле:
где: а - поправочный коэффициент, а=0,5÷1,0.
Коэффициент KИ передается на четвертый вход регулятора положения штока 3 в качестве настроечного коэффициента ПИ-регулятора.
Блок 13 при поступлении информации от блока 11 по величинам  ,
,
,
,
,
,  рассчитывает фактические рабочие диапазоны изменения управляющего давления ΔPвых и хода штока клапана ΔX по формулам:
рассчитывает фактические рабочие диапазоны изменения управляющего давления ΔPвых и хода штока клапана ΔX по формулам:

Блок 14 по информации от блока 13 рассчитывает коэффициент пропорциональности по формуле:
где: b - поправочный коэффициент, b=0,5÷1,0.
Коэффициент KП поступает на третий вход регулятора положения штока 3 в качестве настроечного коэффициента ПИ-регулятора.
Переключатель 9 при получении второго сигнала от блока 10 переключает режим работы регулятора 5 по заданию с выхода регулятора положения штока клапана 3, тем самым переводя работу устройства с режима настройки (обучения) на режим нормального функционирования. При этом осуществляется автоматическая стабилизация положения штока клапана на заданном значении в зависимости от уровня тока во входной цепи, а также вида клапана и его пропускной характеристики в каскадном режиме.
Введение в устройство переключателя задания давления 9, таймера 10, блока анализа переменных 11, блока расчета коэффициента интегрирования 12, блока расчета максимальных приращений 13 и блока расчета коэффициента пропорциональности 14 позволяет оптимизировать и упростить процедуру подбора настроечных коэффициентов позиционера при его установке на промышленные регулирующие клапана разнообразного типа.
Реализация в устройстве с помощью дополнительных блоков режима настройки (обучения) коэффициентов регулятора положения штока позволяет определять эти коэффициенты автоматически при включении электрического питания независимо от типа клапана и его размеров.
В целом, введение новых блоков в известное устройство позволяет повысить качество регулирования положения штока клапана в условиях промышленных помех и установки на разнообразных типах регулирующих клапанов.
Изготовлена опытная партия позиционеров приводного механизма в количестве 10 штук. Проведены промышленные испытания позиционера, подтвердившие его надежность и высокое качество регулирования положения клапана в условиях промышленных помех.
Позиционер приводного механизма, содержащий блок питания, блок расчета заданного положения штока, выход которого связан с первым входом регулятора положения штока, второй вход которого через преобразователь линейного перемещения в напряжение связан со штоком клапана, а выход регулятора - с первым входом регулятора давления, второй вход которого через пневмоэлектрический преобразователь связан с входом мембранного привода клапана и выходом электропневматического преобразователя, вход которого связан с выходом регулятора давления, при этом первый выход блока питания связан с входами питания блока расчета заданного положения штока, регулятора положения штока, преобразователя линейного перемещения, регулятора давления, пневмоэлектрического и электропневматического преобразователей, а второй выход блока питания связан с вторым входом питания электропневмопреобразователя, отличающийся тем, что он дополнительно содержит переключатель задания давления, первый вход которого связан с выходом регулятора положения, второй вход - с выходом таймера, первый выход связан с первым входом регулятора давления, второй выход - с первым входом блока анализа переменных, второй вход которого связан с выходом пневмоэлектрического преобразователя, третий вход - с выходом преобразователя линейного перемещения, а первый выход через таймер и блок расчета коэффициента интегрирования - с третьим входом регулятора положения, второй выход через блок расчета максимальных приращений переменных и блок расчета коэффициента пропорциональности - с четвертым входом регулятора положения, при этом первый выход блока питания связан с входами питания переключателя задания давления, таймера, блока анализа переменных, блоков расчета коэффициента интегрирования, максимальных приращений и коэффициента пропорциональности.