Результат интеллектуальной деятельности: ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ МОБИЛЬНЫХ МАШИН И КРУПНОГАБАРИТНЫХ ШТУЧНЫХ ГРУЗОВ
Вид РИД
Изобретение
Изобретение относится к подъемно-транспортному машиностроению, а именно к грузозахватным устройствам преимущественно для выполнения погрузочно-разгрузочных работ различных видов техники и крупногабаритных грузов.
Известно грузозахватное устройство (см. авторское свидетельство №1393766), основной задачей которого является обеспечение горизонтального положения преимущественно контейнеров. Устройство содержит раму 1 с захватными органами 2. На раме установлена тележка 3 на подвижных катках. Тележка может передвигаться по раме с помощью реечного привода и гидродвигателя и соединена подвесками 5 к грузоподъемному устройству. Выравнивание несущей рамы достигается передвижением тележки. Датчиком положения рамы служит гироскоп с вертикальным расположением главной оси. Устройство имеет недостаток в том, что не позволяет центрировать груз в поперечной плоскости и не позволяет производить захваты грузов разных размеров.
Цель изобретения - создание универсального грузозахватного устройства, пригодного для транспортирования широкой номенклатуры грузов и центрирования их во взаимно перпендикулярных плоскостях.
Поставленная цель достигается тем, что грузозахватное устройство состоит из неподвижной рамы и двух выдвижных секций от передач винт - гайка, позволяющих изменять габариты траверсы по длине, и четырех подвижных кронштейнов с одноветвевыми стропами для подвески грузов. Кронштейны передвигаются вдоль направляющих в поперечной плоскости с помощью передач винт-гайка для изменения габаритов захватного устройства по ширине. Включением соответствующих приводов производится центрирование грузов.
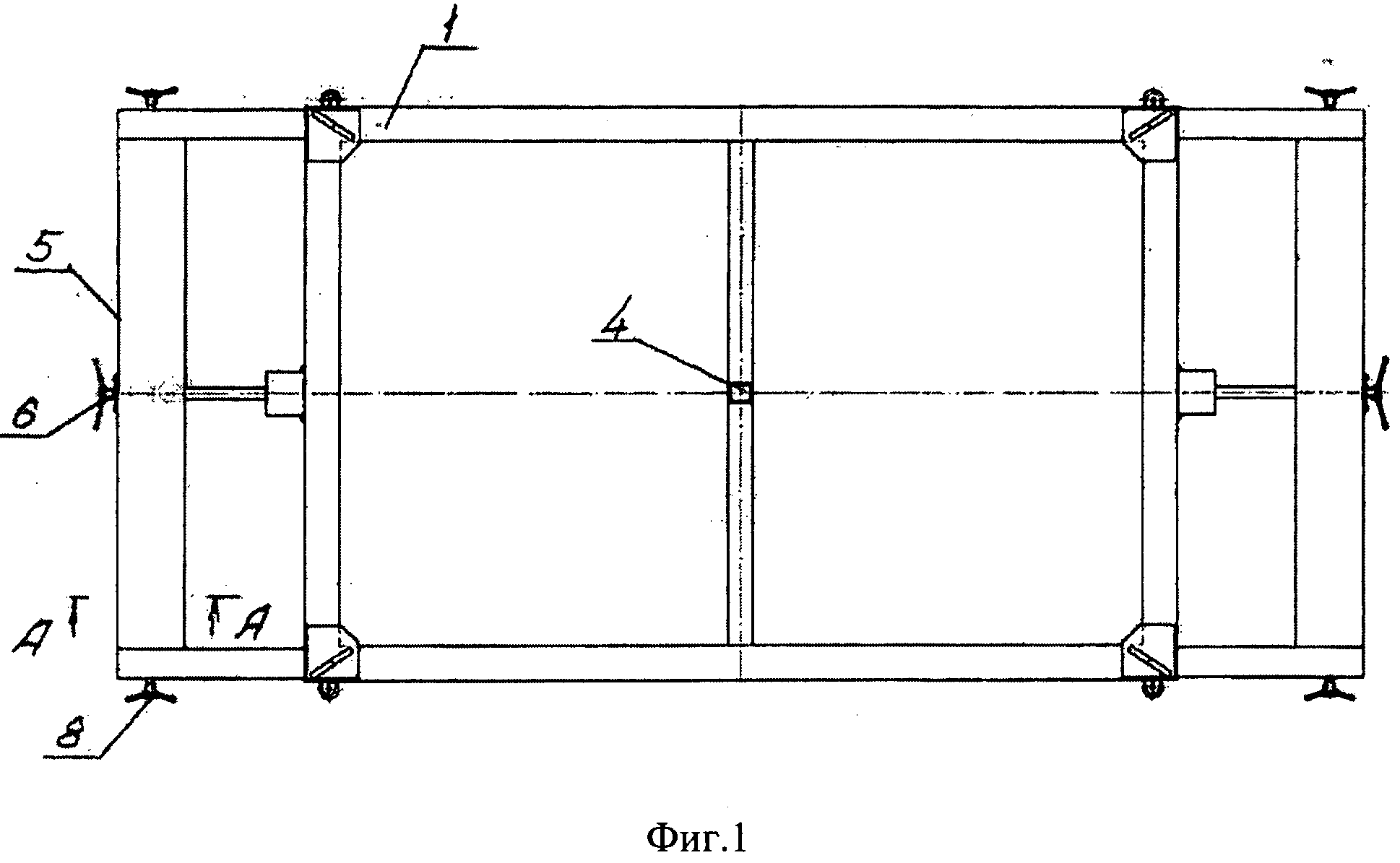
На чертеже фиг.1 показано грузозахватное устройство, вид сверху, на фиг.2 - вид сбоку, и сечение А-А балки подвижной рамы. Рама 1 с помощью кронштейнов и четырехветвевого стропа 3 подвешивается на крюк грузоподъемного крана. На раме установлен указатель уровня 4, входящий в комплект ограничителя грузового момента стрелового крана. Две подвижные секции 5 выдвигаются с помощью самотормозящей передачи винт-гайка для возможности захвата груза любого заданного габарита и центрирования неподвижной рамы в продольной плоскости. Вдоль поперечной балки 5 подвижных секций передвигаются кронштейны 7 вертикальных одноветвевых стропов 8 для подвески штучного груза. Кронштейны передвигаются в пазах типа «ласточкин хвост» с помощью передач винт-гайка для настройки вертикальных стропов по ширине груза и центрирования его в поперечной плоскости.
Захват и центрирование груза во взаимно перпендикулярных плоскостях производится следующим образом.
Включением привода 6 подвижных секций 5 вертикальные стропы 8 наводятся на груз в зависимости от расстояния между точками подвеса груза. Производится подъем груза до полного отрыва от опорной плоскости и по показателям датчика уклона 4 включением приводов подвижных секций 6 центрируется рама 1 в продольной плоскости, а затем включением приводов передвижения кронштейнов 7 центрируется траверса в поперечной плоскости.
Грузозахватное устройство для выполнения погрузочно-разгрузочных работ мобильных самоходных машин и крупногабаритных штучных грузов, состоящее из неподвижной рамы, подвешенной четырехветвевым стропом на крюк грузоподъемного крана, двух выдвижных секций с приводом от передачи винт-гайка, четырех кронштейнов с вертикальными одноветвевыми стропами для подвески груза, передвигающихся в поперечной плоскости, отличающееся тем, что за счет выдвижения подвижных секций и кронштейнов с вертикальными стропами обеспечивается захват штучных грузов различных габаритов и центрирование рамы по показаниям указателя уровня.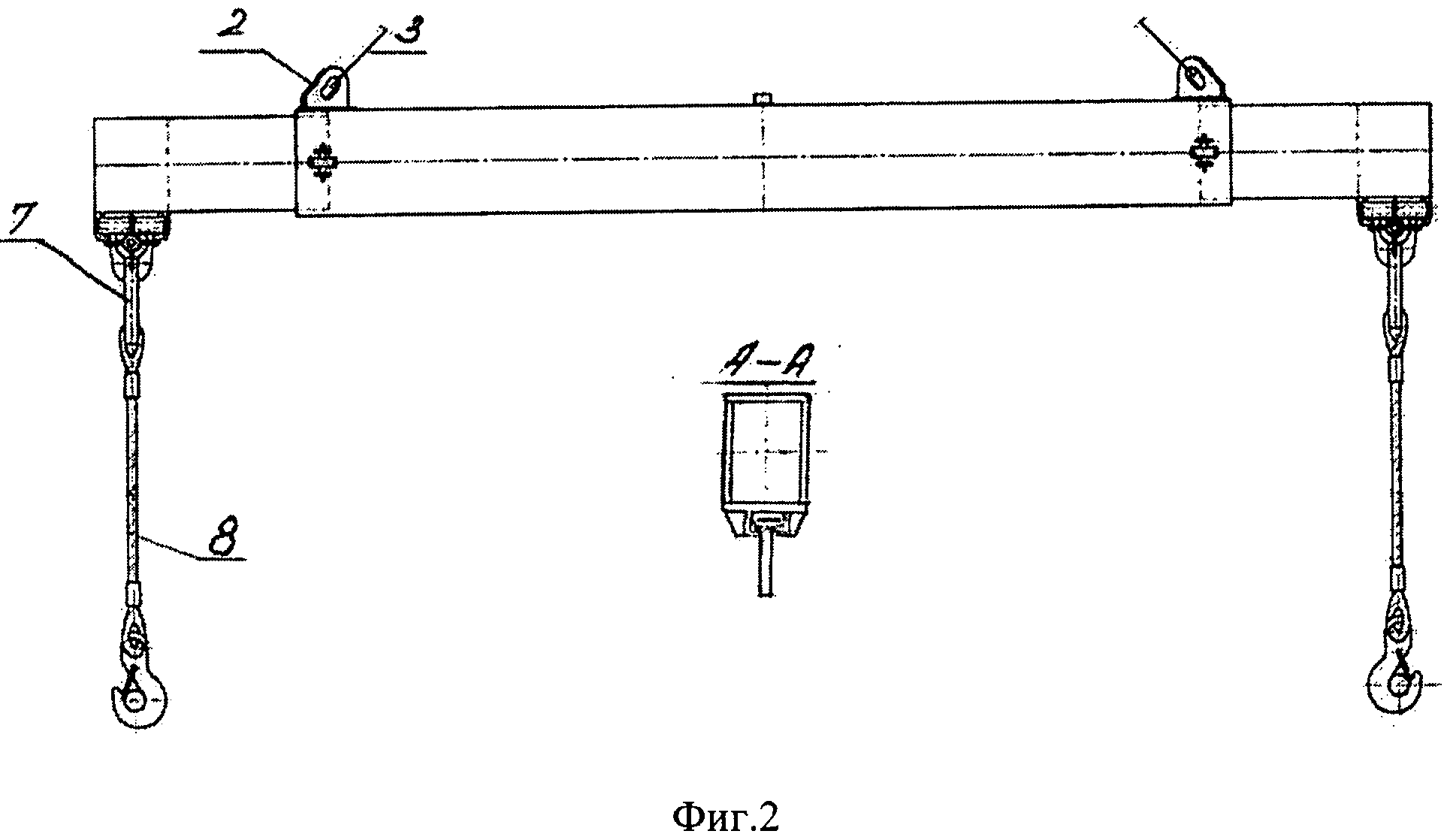
Гидропривод опрокидывающего механизма транспортного средства
Клещевое грузозахватное устройство для захвата и транспортирования труб из различных комплектов полевых магистральных трубопроводов
Привод затворов гидротехнических сооружений с возможностью экстренного ручного опускания и подъема

