Результат интеллектуальной деятельности: УСТРОЙСТВО СОВМЕСТНОЙ ОБРАБОТКИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ КУРСА МОБИЛЬНОГО СРЕДСТВА ГНСС-КОМПАСОМ И ГИРОГОРИЗОНТКОМПАСОМ
Вид РИД
Изобретение
Заявленное устройство относится к устройствам навигации, в частности к устройствам совместной обработки результатов измерения курса ГНСС-компасом и гирогоризонткомпасом. Здесь и далее ГНСС-компасом будем называть радионавигационную аппаратуру для определения фазо-метрическим методом пространственной ориентации подвижного объекта по сигналам ГНСС с использованием трех и более приемных антенн (например, аппаратура МРК-32, разработка Красноярского политехнического университета, Satellite Compass Model SC, разработка фирмы FURUNO, и ряд других).
Заявленное устройство может быть использовано в навигационных комплексах мобильных средств (МС).
Основным требованием, предъявляемым к устройствам совместной обработки, является уменьшение погрешности навигационных измерений.
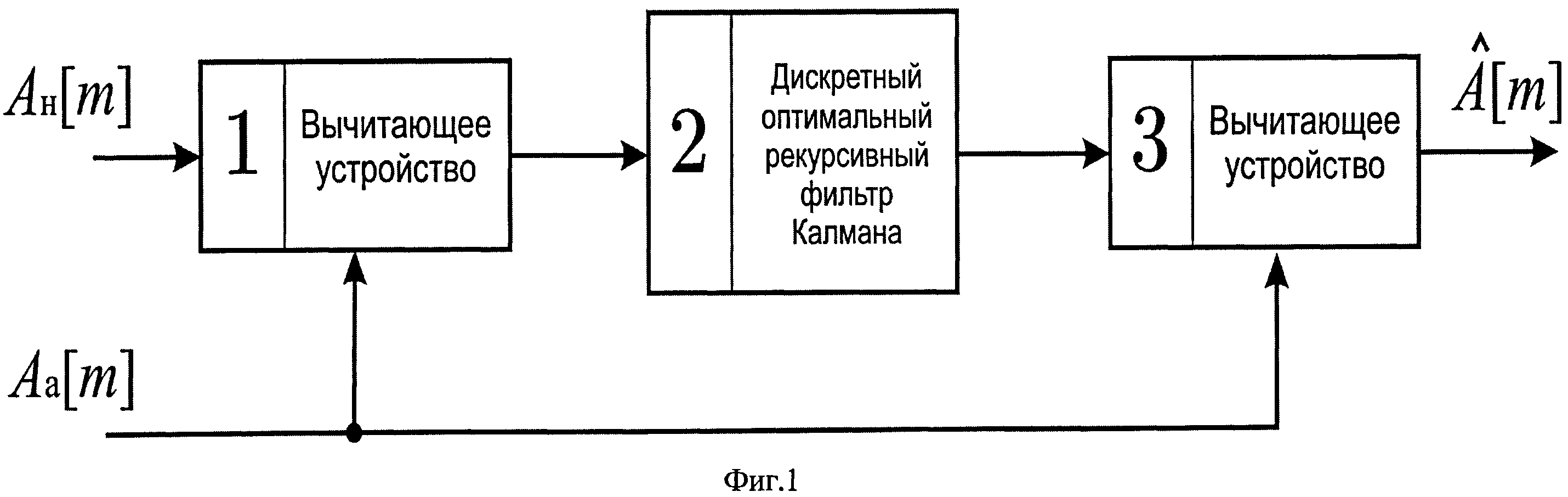
Известно устройство [1-11], выполняющее в дискретном времени tm (m=1, 2, 3, …, М-1, М) совместную обработку текущих значений координат объекта, измеренных автономным и неавтономным навигационными каналами. Схема функциональная такого устройства приведена на фиг.1. Приведенную схему в известной литературе называют схемой компенсации ошибок.
Известное устройство содержит:
- вычитающие устройства 1 и 3 (всего 2 шт.);
- дискретный рекурсивный оптимальный фильтр Калмана 2.
На входы вычитающего устройства 1 поступают значения координат подвижного объекта Aa[m] и Ан[m], измеренные автономным и неавтономным навигационными каналами, соответственно. Кроме того, значения координат подвижного объекта Aa[m], измеренные автономным навигационным каналом, поступают на вход вычитающего устройства 3.
Выход вычитающего устройства 1 подключен к входу дискретного рекурсивного оптимального фильтра Калмана 2. Выход дискретного рекурсивного оптимального фильтра Калмана 2 подключен к входу вычитающего устройства 3. Выход вычитающего устройства 3 подключен к аппаратуре потребителя навигационной информации.
Вычитающее устройство 1 решает задачу расчета текущего значения псевдонаблюдения погрешности автономного навигационного канала P[m] по формуле

Фильтр Калмана 2 решает задачу определения оптимальной оценки погрешности определения текущих координат подвижного объекта  автономным навигационным каналом с использованием следующего алгоритма:
автономным навигационным каналом с использованием следующего алгоритма:

где  - переходная матрица состояния погрешностей автономного канала;
- переходная матрица состояния погрешностей автономного канала;
δ[m] - поправка, вычисляемая по формуле

K[m] - матрица коэффициентов передачи фильтра.
В приведенном алгоритме реализована концепция «экстраполяция - коррекция». Согласно этой концепции оценку погрешностей канала автономных средств навигации  полученную на предшествующем такте счета, экстраполируют на последующий такт счета путем ее умножения на переходную матрицу состояния погрешностей автономного канала Ф[m/m-1] и уточняют путем вычитания из нее поправки δ[m].
полученную на предшествующем такте счета, экстраполируют на последующий такт счета путем ее умножения на переходную матрицу состояния погрешностей автономного канала Ф[m/m-1] и уточняют путем вычитания из нее поправки δ[m].
Коэффициент передачи фильтра Калмана K[m] определяют с использованием следующих формул



где V[m/m-1] - вариация погрешностей экстраполяции;
V[m] - вариация погрешностей оценки состояния составляющих вектора ΔXa[m-1];
cov{nн[m]} - ковариация δ-коррелированных гауссовых шумов измерения неавтономного канала;
cov{na[m]} - ковариация δ-коррелированных гауссовых шумов измерения автономного канала;
I - единичная матрица;
T - знак транспонирования матрицы.
На входы вычитающего устройства 3 поступают от фильтра Калмана 2 совместная оптимальная оценка погрешности автономного навигационного канала  и значение координаты подвижного объекта
и значение координаты подвижного объекта  измеренное автономным каналом. Вычитающее устройство 3 решает задачу расчета совместной оптимальной оценки координаты подвижного объекта по формуле
измеренное автономным каналом. Вычитающее устройство 3 решает задачу расчета совместной оптимальной оценки координаты подвижного объекта по формуле

Совместная оптимальная оценка погрешности автономного навигационного канала поступает от вычитающего устройства 3 к потребителю навигационной информации.
В общем случае известное устройство проводит совместную обработку всех составляющих вектора состояния текущих координат подвижного объекта, и для его математического описания используют векторно-матричный аппарат теории пространства состояний. Ниже будет рассмотрен частный случай обработки информации о текущем состоянии только одной составляющей из состава вектора состояния текущих координат подвижного объекта. В этом случае все векторно-матричные величины, входящие в выражения (1-6), являются скалярными. Устройство совместной обработки информации о текущем состоянии только одной составляющей вектора состояния текущих координат подвижного объекта будем считать прототипом заявленного устройства.
К существенным признакам прототипа, совпадающим с существенными признаками заявляемого технического решения, относятся:
- назначение (оптимальная совместная обработка информации от разнородных навигационных датчиков);
- реализация канонической схемы компенсации ошибок автономного канала;
- реализация концепции «экстраполяция - коррекция» ошибок автономного канала (в рассматриваемом случае ошибок гирогоризонткомпаса);
- реализация рекурсивного метода обработки информации;
- функционирование в реальном масштабе времени.
К недостаткам прототипа, применительно к случаю оптимальной совместной обработки информации о курсе мобильного средства с использованием ГНСС-компаса и гирогоризонткомпаса, относятся отсутствие возможности анализа реальных ошибок навигационных измерений в динамике движения и, как следствие, отсутствие возможности принятия мер, исключающих:
- возрастание погрешности оптимальной совместной обработки информации при наличии выбросов результатов измерения курса ГНСС-компасом;
- наличие погрешности оптимальной совместной обработки информации вследствие неадекватности математических форм представления переходного коэффициента погрешности гирогоризонткомпаса и шумов измерения гирогоризонткомпаса неавтономного каналов, используемых в фильтре Калмана, реальным физическим процессам.
Математические формы адекватного представления изменений погрешностей измерения навигационных параметров МС в динамике его движения неизвестны, а их разработка связана с непреодолимыми трудностями, так как МС в общем случае выполняет непредсказуемые маневры по скорости и азимутальному углу.
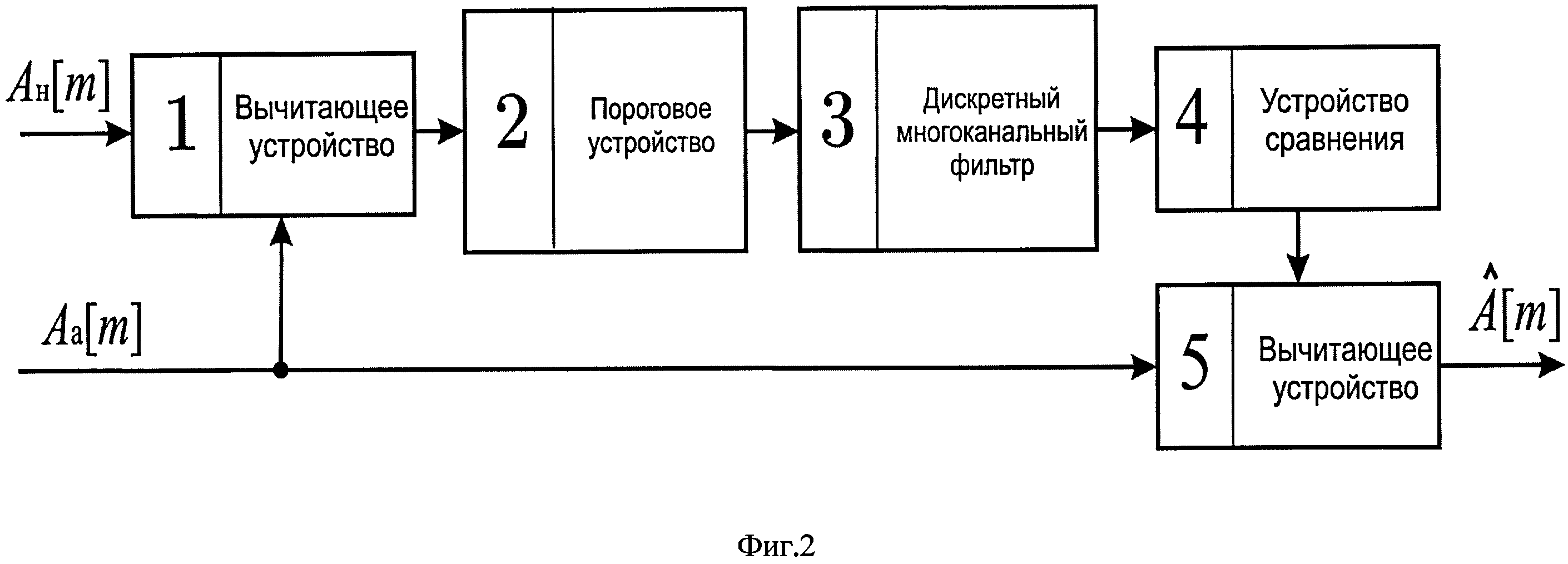
Задачей технического решения является уменьшение погрешности оптимальной совместной обработки информации о курсе мобильного средства. Схема функциональная заявленного устройства совместной обработки приведена на фиг.2.
Поставленная задача решается благодаря тому, что в заявленном устройстве совместной обработки результатов измерения курса мобильного средства ГНСС-компасом и гирогоризонткомпасом, содержащем вычитающие устройства 1 и 5 (всего 2 шт.), пороговое устройство 2, дискретный многоканальный фильтр 3 и устройство сравнения 4, предусмотрены следующие отличия от известного прототипа:
- включены в его состав пороговое устройство, дискретный многоканальный фильтр и устройство сравнения;
- исключен дискретный оптимальный фильтр Калмана, вместо которого включены в состав изделия многоканальный дискретный фильтр и устройство сравнения.
Между совокупностью существенных признаков заявленного объекта и достигаемым техническим результатом существует причинно-следственная связь, а именно:
- включение в состав заявленного объекта порогового устройства 2 уменьшает погрешность оптимальной обработки информации при появлении выбросов в результатах измерения курса ГНСС - компасом;
- включение в состав устройства дискретного многоканального фильтра и устройства сравнения уменьшает погрешность оптимальной обработки информации, обусловленную неадекватностью математических форм представления переходного коэффициента погрешности автономного канала и шумов измерения реальным физическим процессам.
Согласно схеме функциональной, приведенной на фиг.2, на входы вычитающего устройства 1 поступают значения курса МС Aa[m] и Aн[m], измеренные гирогоризонткомпасом и ГНСС-компасом, соответственно. Кроме того, значение координаты подвижного объекта Aa[m], измеренное автономным навигационным каналом поступает на вход вычитающего устройства 5. Выход вычитающего устройства 1 подключен к входу порогового устройства 2. Выход порогового устройства 2 подключен к входу дискретного многоканального фильтра 3. Выход дискретного многоканального фильтра 3 подключен к входу устройства сравнения 4. Выход устройства сравнения 4 подключен к входу вычитающего устройства 5. Выход вычитающего устройства 5 подключен к входу аппаратуры потребителя навигационной информации.
Вычитающее устройство 1 решает задачу расчета текущего значения псевдонаблюдения погрешности автономного навигационного канала P[m] по формуле

Пороговое устройство 2 сравнивает абсолютное значение псевдонаблюдения Р[m] с заданным порогом Z. Если порог не превышен, то псевдонаблюдение без изменения поступает на вход многоканального дискретного фильтра 3, иначе пороговое устройство подает на вход многоканального дискретного фильтра 3 псевдонаблюдение P[m-1], задержанное относительно P[m] на такт счета.
Дискретный многоканальный фильтр 3 решает следующие задачи:
- рассчитывает элементы  прямоугольной матрицы
прямоугольной матрицы  размерности I×J вида
размерности I×J вида
по формуле

где


- рассчитывает элементы  прямоугольной матрицы
прямоугольной матрицы  размерности I×J вида
размерности I×J вида
по формуле

где α - коэффициент «экспоненциального затухания»;
- выдает результаты расчета элементов матриц 
 на вход устройства сравнения 4.
на вход устройства сравнения 4.
Устройство сравнения 4 решает следующие задачи:
- определяет номер строки i* и столбца j*, на пересечении которых находится минимальный элемент матрицы 

где arg - функция, возвращающая номера строки и столбца элемента матрицы;
- выбирает значение элемента матрицы  расположенного на пересечении строки с номером i* и столбца с номером j*, и выдает выбранное значение
расположенного на пересечении строки с номером i* и столбца с номером j*, и выдает выбранное значение  на вход вычитающего устройства 5.
на вход вычитающего устройства 5.
Иными словами, дискретный многоканальный фильтр определяет зависимость текущего значения оценки погрешности гирогоризонткомпаса  и зависимость среднеквадратического значения разности между экстраполированным значением погрешности гирогоризонткомпаса и ее псевдонаблюдением
и зависимость среднеквадратического значения разности между экстраполированным значением погрешности гирогоризонткомпаса и ее псевдонаблюдением  от величины переходного коэффициента фильтра f(i)=i/I и коэффициента передачи фильтра k(j)=j/J. Устройство сравнения отыскивает минимум среднеквадратического значения разности между экстраполированным значением погрешности гирогоризонткомпаса и ее псевдонаблюдением, определяет значения i* и j*, соответствующие найденному минимуму, и находит оценку погрешности автономного канала
от величины переходного коэффициента фильтра f(i)=i/I и коэффициента передачи фильтра k(j)=j/J. Устройство сравнения отыскивает минимум среднеквадратического значения разности между экстраполированным значением погрешности гирогоризонткомпаса и ее псевдонаблюдением, определяет значения i* и j*, соответствующие найденному минимуму, и находит оценку погрешности автономного канала  соответствующую полученным значениям переходного коэффициента и коэффициента передачи.
соответствующую полученным значениям переходного коэффициента и коэффициента передачи.
Вычитающее устройство 5 решает задачу расчета совместной оптимальной оценки курса МС по формуле

Совместная оптимальная оценка курса МС поступает от вычитающего устройства 5 к потребителю навигационной информации.
Устройство изготавливают в виде программно-аппаратного модуля с использованием перспективных программируемых логических интегральных схем (ПЛИС) фирмы Xilinx на основе программных пакетов MATLAB-Simulink R2008b с использованием библиотечных элементов Xilinx, экспортируемых из программного пакета Xilinx ISE 11.
Литература
1. Степанов О.А. Состояние, перспективы развития и применения наземных систем навигации для подвижных объектов. // Гироскопия и навигация. 2005. №2 (49). - С.95-121.
2. Харисов В.Н., Горев А.П. Синтез тесносвязанного алгоритма инерциально-спутниковой навигации. // Радиотехника. 2000. - №7. - С.80-86.
3. Харисов В.Н., Аникин А.Л., Оганесян А.А. Статистический анализ характристик помехоустойчивости алгоритма глубокой интеграции приемника спутниковой навигации и инерциальных датчиков. // Радиотехника. Радиосистемы. 2005. - №7. - С.21-26.
4. Синтез и анализ комплексированных ГЛОНАСС/ИНС приемников: Дис. маг. техники и технологий: 05.12.04. / Шатилов А.Ю. МЭИ, 2004. - 132 с.
5. Перов А.И., Шатилов А.Ю. Сравнительный анализ характеристик двух алгоритмов комплексной вторичной обработки информации в инерциально-спутниковых навигационных системах. II Радиотехника. Радиосистемы. 2003. - №7. - С.88-98.
6. Kreye C., Eissfeller B., Winkel J.O. Improvements of GNSS Receiver Performance Using Deeply Coupled INS Measurements. // ION GPS 2000. Salt Lake City, UT: 2000. - September 19-22. - Pp.844-854.
7. Перов А.И., Шатилов А.Ю. Синтез и анализ вторичных алгоритмов обработки информации в комплексных ГЛОНАСС/ИНС системах. // Сборник тезисов докладов 8-й Международной конференции «Радиотехника, электротехника и энергетика». - T.1. М.: МЭИ, 2002 - с.114.
8. Ривкин С.С. Метод оптимальной фильтрации Калмана и его применение в инерциальных навигационных системах. Л.: Судостроение, 1974. - 219 с.
9. Шебшаевич B.C., Дмитриев П.П. и др. Сетевые спутниковые радионавигационные системы. - М.: "Радио и связь", 1993. - 408 с.
10. Ярлыков М.С. Статистическая теория радионавигации [Текст] / Ярлыков М.С.: Радио и связь, 1985. - 344 с.
11. Ю.П.Гришин, В.П.Ипатов, Ю.М.Казаринов и др. Радиотехнические системы. Учеб. для вузов по спец. "Радиотехника" [Текст] / Ю.М.Казаринов. М.: Высшая школа, 1990. - 496 с.
Устройство быстрой установки и снятия антенны
Пространственно-распределительный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования
Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех
Радиопередающее устройство наземной радионавигационной станции длинноволнового диапазона, обеспечивающее формирование и сложение стандартного сигнала и сигнала повышенной точности для определения координат потребителей
Устройство для определения направлений на источники радиоизлучения
Способ управления автономной системой электроснабжения космического аппарата
Способ пространственной селекции расстояний при решении задачи позиционирования мобильного средства дальномерным методом в наземной локальной радионавигационной системе
Способ повышения точности дифференциальной коррекции навигационных параметров в длинноволновой системе определения местоположения
Способ выпекания теста
Компенсатор помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы
Способ эксплуатации никель-водородной аккумуляторной батареи в автономной системе электропитания искусственного спутника земли
Способ обнаружения преднамеренных помех нап гнсс
Устройство обнаружения источников ложных навигационных сигналов нап гнсс
Устройство пространственной селекции сигналов с компенсацией преднамеренных помех
Устройство компенсации преднамеренных радиопомех нап гнсс
Активная передающая антенная система радиоподавления низкоорбитальных спутников-ретрансляторов системы связи
Способ отождествления позиционных измерений и определения местоположения воздушных целей в пространственно-распределенной радионавигационной системе в условиях многоцелевой обстановки
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки

