Результат интеллектуальной деятельности: БЕСПЛАТФОРМЕННЫЙ ОРБИТАЛЬНЫЙ ГИРОКОМПАС С ПРОИЗВОЛЬНОЙ КУРСОВОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано при создании трехосного бесплатформенного орбитального гирокомпаса (БОГК) гироскопической системы ориентации (ГСО) для космического аппарата (КА), движущегося по околокруговым орбитам.
Наиболее близким аналогом может служить техническое решение, представленное в статье авторов Кэмпбел, Коффи «Цифровые системы отсчета углов». Журнал «Вопросы ракетной техники», 1971 г., №11, стр.63-88. В нем рассматривается БОГК в составе гироскопического трехосного блока датчиков угловых скоростей, оптикоэлектронного построителя местной вертикали и вычислителя, реализующего алгоритм режима орбитального гирокомпасирования относительно орбитальной системы координат (ОСК).
Известна также система ориентации в составе трехосного гироприбора ориентации в кардановом подвесе, ИК-вертикали, вычислителя и задатчика путевого угла по курсу («Системы управления космических комплексов на базе орбитальной станции «Алмаз»». Эскизный проект. Система ориентации, стр.6, 72, 188. НПО Машиностроения. 1990 г.). Данная система работает в режиме трехосного орбитального гирокомпаса и в процессе программного движения по курсу непрерывно строит путевой угол. Недостаток системы заключается в том, что при построении ПСК ограничен угол курсового поворота КА. Сохраняя режим орбитального гирокомпасирования, КА можно повернуть относительно ОСК на углы ≤3÷4°, при дальнейшем повороте КА падает точность ориентации и при углах курсового поворота КА≥10° погрешности становятся недопустимо большими, в то время как требуется круговое вращение КА по курсу без потери точности ориентации относительно ОСК.
Целью предлагаемого решения является устранение указанных недостатков, т.е. создание устройства - бесплатформенного орбитального гирокомпаса для осуществления поворота КА по курсу на неограниченные углы без потери точности ориентации КА относительно ОСК.
Согласно изобретению технический результат достигается тем, что в известное устройство, содержащее построитель местной вертикали (ПМВ), выход которого по каналу крена подключен к последовательно соединенным первому сумматору, второй вход которого соединен с выходом БОГК по крену, параллельно включенным первым и вторым усилительно-преобразовательными блоками (УПБ), выход первого из которых подключен к первому входу второго сумматора, а выход второго - к первому входу третьего сумматора, вторые входы которых соединены с выходами гироскопического датчика угловых скоростей (ГДУС) по каналам ориентации КА по крену и курсу соответственно, а выходы - с первыми входами четвертого и пятого сумматоров, выходы которых подключены соответственно к первому и второму интегрирующим устройствам (ИУ), выходы которых образуют выходы БОГК по крену и курсу, при этом выход БОГК по курсу подключен ко входу первого блока компенсации перекрестных связей (БКПС), выход которого соединен со вторым входом четвертого сумматора, а выход БОГК по крену подключен ко входу второго БКПС, выход которого соединен со вторым входом пятого сумматора, вместе с этим выход ПМВ по каналу тангажа подключен к последовательно соединенным шестому сумматору, второй вход которого соединен с выходом БОГК по тангажу, третьему УПБ и седьмому сумматору, второй вход которого подключен к выходу ГДУС канала ориентации КА по тангажу, а выход - ко входу третьего ИУ, выход которого образует выход БОГК по тангажу, причем третий вход седьмого сумматора подключен к выходу задатчика орбитальной угловой скорости (ЗОУС) дополнительно введены новые блоки и связи: первый, второй, третий и четвертый синусные преобразователи (СП), первый, второй, третий и четвертый косинусные преобразователи (КП), восьмой, девятый, десятый сумматоры, третий и четвертый БКПС и блок формирования программной системы координат (БФПСК), при этом выход первого сумматора подключен одновременно ко входам первого СП и первого КП, выход шестого сумматора подключен одновременно ко входам второго СП и второго КП, выходы первого КП и второго СП подключены к первому и второму входам восьмого сумматора, выходы второго КП и первого СП подключены к первому и второму входам девятого сумматора, выход восьмого сумматора подключен ко входам первого и второго УПБ, а выход девятого сумматора подключен ко входу третьего УПБ, выход первого БКПС подключен ко входу третьего КП выход которого подключен ко второму входу четвертого сумматора, выход второго БКПС подключен ко входу четвертого КП, выход которого подключен ко второму входу пятого сумматора, вход третьего БКПС подключен к выходу БОГК по тангажу, а выход ко входу третьего СП, выход которого подключен к третьему входу пятого сумматора, вход четвертого БКПС подключен к выходу БОГК по курсу, а выход - к четвертому СП, выход которого подключен ко второму входу десятого сумматора, первый вход которого соединен с выходом седьмого сумматора, при этом третьи входы второго, третьего и седьмого сумматоров подключены к соответствующим выходам БФПСК, сигналы по которым равны -ΩsinψП,  , ΩcosψП соответственно для каналов крена, курса и тангажа, причем вход БФПСК подключен к выходу ЗОУС.
, ΩcosψП соответственно для каналов крена, курса и тангажа, причем вход БФПСК подключен к выходу ЗОУС.
На фиг.1 показана структурно-функциональная схема бесплатформенного орбитального компаса с произвольной курсовой ориентацией космического аппарата
На фиг.1 обозначено:
1 - построитель местной вертикали (ПМВ) с выходами по крену γП и тангажу ϑП соответственно;
2 - гироскопический датчик угловых скоростей (ГДУС) с измерительными осями угловых скоростей КА в проекциях на собственные оси: продольная ось Х (по крену) - ωx, вертикальная ось Y (по курсу) - ωу и тангажу - ωz;
3÷12 - сумматоры;
13, 14, 15 - усилительно-преобразовательные блоки (УПБ);
16 - задатчик орбитальной угловой скорости (ЗОУС);
17 - блок формирования программной системы координат (БФПСК);
18÷20 - интегрирующие устройства (ИУ);
21÷24 - блоки компенсации перекрестных связей (БКПС);
25÷28 - косинусные преобразователи (КП);
29÷32 - синусные преобразователи;
Δβ, Δα, Δθ - выходные углы БОГК по крену, курсу и тангажу соответственно;
ψП,  - программный угол и программная угловая скорость поворота КА по курсу;
- программный угол и программная угловая скорость поворота КА по курсу;
К1, К2, К3 - коэффициенты коррекции;
ωX, ωY, ωZ - выходные сигналы ГДУС, соответствующие угловым скоростям КА по крену, курсу и тангажу;
γП, ϑП - сигналы ПМВ по крену и тангажу соответственно;
Ω - орбитальная угловая скорость.
Работа БОГК совершается следующим образом (см. фиг.1).
В начальный период строится приборная ОСК и КА ориентируется в орбитальной системе координат. При поступлении сигналов - ΩsinψП,
, ΩcosψП от БФПСК на выходы ГДУС через третьи входы сумматоров 7, 8 и 9, КА поворачивается по курсу на угол ψП с угловой скоростью  , при этом начнут преобразовываться сигналы коррекции и сигналы компенсации перекрестных связей, а положение приборных осей БОГК относительно ОСК сохранится без изменения. В соответствии с фиг.1 уравнения БОГК примут вид:
, при этом начнут преобразовываться сигналы коррекции и сигналы компенсации перекрестных связей, а положение приборных осей БОГК относительно ОСК сохранится без изменения. В соответствии с фиг.1 уравнения БОГК примут вид:



к1=к3
ψ=α+ΔαП;
γ=β+Δβ;
ϑ=θ+Δθ,

где α, β, θ - углы ориентации приборных осей БОГК относительно ОСК соответственно по курсу, крену и тангажу.
Выходные сигналы ГДУС будут равны:



где γ,  , ψ,
, ψ,  , ϑ,
, ϑ,  - углы и угловые скорости КА относительно ПСК.
- углы и угловые скорости КА относительно ПСК.
Примеры. Повороты КА на 90° и 180°:
-ψn=90°, уравнения движения принимают вид:



ψКА=ψП=90°
таким образом, в установившемся режиме КА повернулся на 90°, БОГК сохранил ориентацию относительно ОСК, т.к. β=α=θ=0, при этом каналы крена и тангажа поменялись местами, в канале тангажа поменялся знак перед коэффициентом коррекции из-за изменения полярности сигнала ПМВ относительно ОСК при повороте КА;
-ψn=180°, уравнения движения принимают вид:
 ;
;

 ,
,
получаем ψКА=180°, в установившемся режиме β=α=θ=0, знаки перед коэффициентами коррекции поменялись из-за изменения полярности сигнала ПМВ относительно ОСК при повороте КА.
Таким образом, при повороте КА на неограниченный угол курсового поворота (0÷±360°) сохраняется режим орбитального гирокомпасирования без потери точности ориентации КА относительно ОСК.
Бесплатформенный орбитальный гирокомпас (БОГК) с произвольной курсовой ориентацией космического аппарата, содержащий построитель местной вертикали (ПМВ), выход которого по каналу крена подключен к последовательно соединенным первому сумматору, второй вход которого соединен с выходом БОГК по крену, параллельно включенным первым и вторым усилительно-преобразовательными блоками (УПБ), выход первого из которых подключен к первому входу второго сумматора, а выход второго - к первому входу третьего сумматора, вторые входы которых соединены с выходами гироскопического датчика угловых скоростей (ГДУС) по каналам ориентации КА по крену и курсу соответственно, а выходы - с первыми входами четвертого и пятого сумматоров, выходы которых подключены соответственно к первому и второму интегрирующим устройствам (ИУ), выходы которых образуют выходы БОГК по крену и курсу, при этом выход БОГК по курсу подключен ко входу первого блока компенсации перекрестных связей (БКПС), выход которого соединен со вторым входом четвертого сумматора, а выход БОГК по крену подключен ко входу второго БКПС, выход которого соединен со вторым входом пятого сумматора, вместе с этим выход ПМВ по каналу тангажа подключен к последовательно соединенным шестому сумматору, второй вход которого соединен с выходом БОГК по тангажу, третьему УПБ и седьмому сумматору, второй вход которого подключен к выходу ГДУС канала ориентации КА по тангажу, а выход - ко входу третьего ИУ, выход которого образует выход БОГК по тангажу, причем третий вход седьмого сумматора подключен к выходу задатчика орбитальной угловой скорости (ЗОУС), отличающийся тем, что в него введены первый, второй, третий и четвертый синусные преобразователи (СП), первый, второй, третий и четвертый косинусные преобразователи (КП), восьмой, девятый, десятый сумматоры, третий и четвертый БКПС и блок формирования программной системы координат (БФПСК), при этом выход первого сумматора подключен одновременно ко входам первого СП и первого КП, выход шестого сумматора подключен одновременно ко входам второго СП и второго КП, выходы первого КП и второго СП подключены к первому и второму входам восьмого сумматора, выходы второго КП и первого СП подключены к первому и второму входам девятого сумматора, выход восьмого сумматора подключен ко входам первого и второго УПБ, а выход девятого сумматора подключен ко входу третьего УПБ, выход первого БКПС подключен ко входу третьего КП, выход которого подключен ко второму входу четвертого сумматора, выход второго БКПС подключен ко входу четвертого КП, выход которого подключен ко второму входу пятого сумматора, вход третьего БКПС подключен к выходу БОГК по тангажу, а выход - ко входу третьего СП, выход которого подключен к третьему входу пятого сумматора, вход четвертого БКПС подключен к выходу БОГК по курсу, а выход - к четвертому СП, выход которого подключен ко второму входу десятого сумматора, первый вход которого соединен с выходом седьмого сумматора, при этом третьи входы второго, третьего и седьмого сумматоров подключены к соответствующим выходам БФПСК, сигналы по которым равны -Ωsinψ, , Ωcosψ, соответственно для каналов крена, курса и тангажа, причем вход БФПСК подключен к выходу ЗОУС.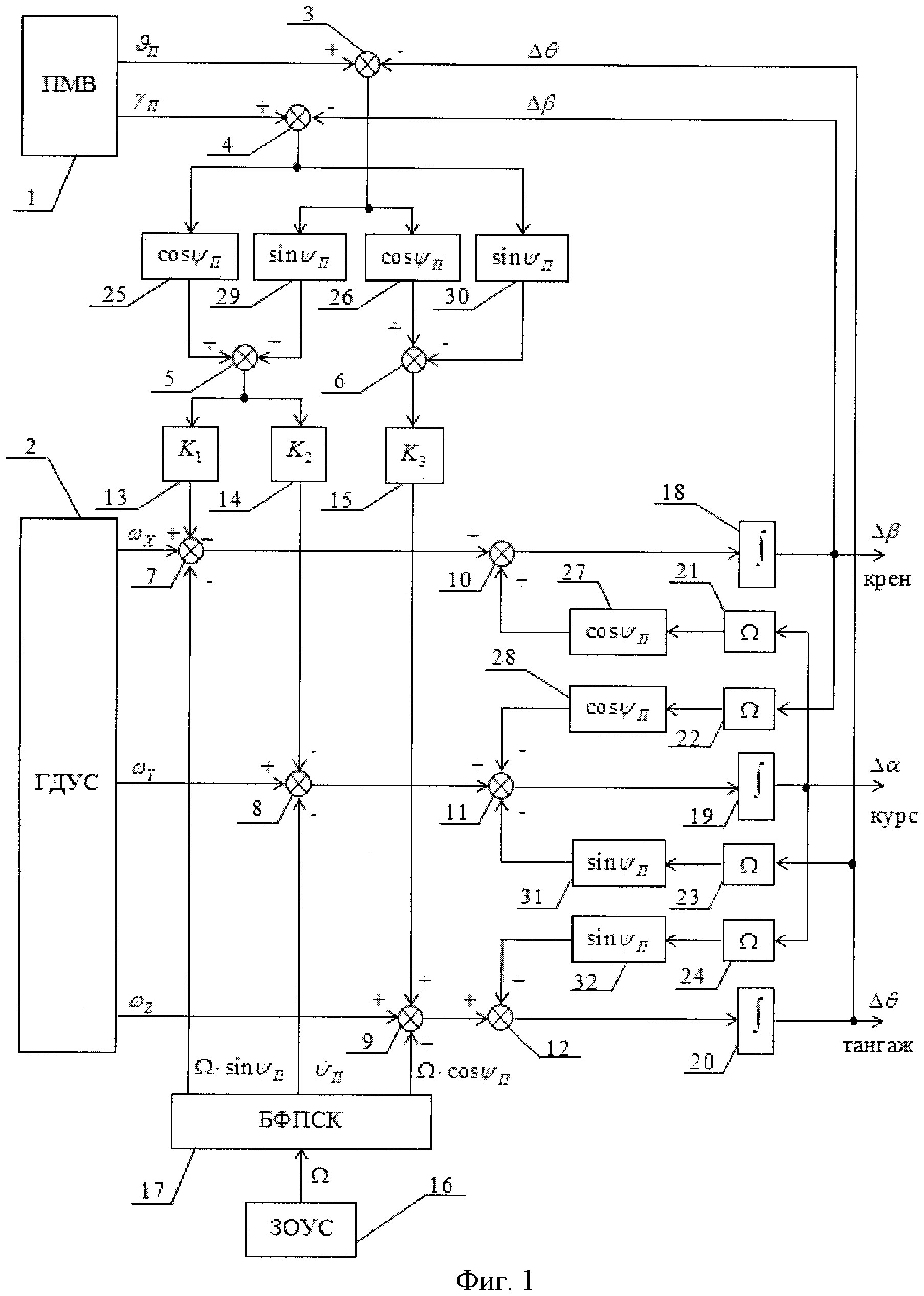
Способ компоновки космического аппарата
Устройство для крепления двух взаимно перпендикулярных панелей
Устройство автоматизированного формирования эталонной информации для навигационных систем
Космический аппарат
Раскрываемый руль ракеты
Аэродинамический руль ракеты
Коммутационное устройство
Способ подрыва осколочно-фугасной боевой части управляемого боеприпаса
Способ теплорадиотехнических испытаний радиопрозрачных обтекателей летательных аппаратов
Способ тепловых испытаний приборного отсека летательного аппарата
Способ компоновки космического аппарата
Устройство для крепления двух взаимно перпендикулярных панелей
Устройство автоматизированного формирования эталонной информации для навигационных систем
Космический аппарат
Раскрываемый руль ракеты
Аэродинамический руль ракеты
Коммутационное устройство
Способ подрыва осколочно-фугасной боевой части управляемого боеприпаса
Способ теплорадиотехнических испытаний радиопрозрачных обтекателей летательных аппаратов
Способ тепловых испытаний приборного отсека летательного аппарата

