Результат интеллектуальной деятельности: ЭЛЕКТРОПРИВОД РОБОТА
Вид РИД
Изобретение
Изобретение относится к робототехнике и может быть использовано при создании электроприводов роботов.
Известно устройство для управления приводом робота, содержащее последовательно соединенные первый сумматор, первый вход которого является входом устройства, второй сумматор, первый блок умножения, третий сумматор, усилитель и электродвигатель, связанный непосредственно с первым датчиком скорости и через редуктор - с первым датчиком положения, выход которого подключен к второму входу первого сумматора, последовательно подключенные второй датчик скорости, второй блок умножения, третий блок умножения и четвертый сумматор, второй вход которого соединен с вторым входом второго сумматора и выходом первого датчика скорости, третий вход - с выходом релейного элемента, подключенного входом к второму входу третьего блока умножения и выходу первого датчика скорости, а выход - со вторым входом третьего сумматора, последовательно соединенные датчик массы и пятый сумматор, второй вход которого подключен к выходу первого задатчика сигнала, а выход - к второму входу первого блока умножения, последовательно соединенные второй датчик положения, первый косинусный функциональный преобразователь, четвертый блок умножения, шестой сумматор, второй вход которого подключен к выходу второго задатчика сигнала, пятый блок умножения, второй вход которого соединен с выходом первого датчика ускорения, а выход - с четвертым входом четвертого сумматора, последовательно соединенные третий задатчик сигнала, седьмой сумматор, второй вход которого подключен к выходу датчика массы, и шестой блок умножения, второй вход которого через второй синусный функциональный преобразователь подключен к выходу второго датчика положения, а выход - к второму входу второго блока умножения, причем второй вход четвертого блока умножения соединен с выходом седьмого сумматора, его выход - с третьим входом пятого сумматора, пятый вход четвертого сумматора через седьмой блок умножения, второй вход которого соединен с выходом второго блока умножения, подключен к выходу второго датчика скорости, последовательно соединенные четвертый задатчик сигнала, восьмой сумматор, второй вход которого подключен к выходу датчика массы и третьему входу шестого сумматора, и восьмой блок умножения, второй вход которого через третий синусный функциональный преобразователь соединен с выходом первого датчика положения, а также последовательно соединенные девятый сумматор, первый и второй входы которого подключены соответственно к выходам первого и второго датчиков положения, четвертый синусный функциональный преобразователь и девятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, десятый сумматор, второй вход которого подключен к выходу восьмого блока умножения и десятый блок умножения, второй вход которого соединен с выходом второго датчика ускорения, а выход - с шестым входом четвертого сумматора, последовательно соединенные пятый косинусный функциональный преобразователь, вход которого подключен к выходу первого датчика положения, одиннадцатый блок умножения, второй вход которого подключен к выходу восьмого сумматора, одиннадцатый сумматор, второй вход которого через последовательно соединенные шестой косинусный функциональный преобразователь и двенадцатый блок умножения, второй вход которого подключен к выходу седьмого сумматора, соединен с выходом девятого сумматора, и тринадцатый блок умножения, второй вход которого подключен к выходу третьего датчика ускорения, а выход - к седьмому входу четвертого сумматора (см. патент России №2272312, БИ №8, 2006 г.).
Его недостатком является то, что в нем отсутствует полная инвариантность динамических свойств рассматриваемого электропривода к непрерывным изменениям его моментных нагрузочных характеристик, поскольку здесь рассматривается робот с другой кинематической схемой.
Известен также электропривод робота, содержащий последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и электродвигатель, связанный с первым датчиком 6 скорости непосредственно и через редуктор - с шестерней, приводящей в движение рейку, закрепленную неподвижно на втором телескопическом звене исполнительного органа робота, и первый датчик положения, измеряющий положение этого второго звена относительно его горизонтальной оси вращения, последовательно соединенные релейный блок и третий сумматор, второй вход которого подключен к выходу первого датчика скорости, входу релейного блока и второму входу первого сумматора, а выход - ко второму входу второго сумматора, третий вход которого соединен с выходом первого сумматора, последовательно соединенные первый задатчик сигнала, четвертый сумматор, второй вход которого соединен с выходом первого датчика положения и с первым входом пятого сумматора, подключенного вторым входом к входу устройства, а выходом - к первому входу первого сумматора, шестой сумматор, ко второму входу которого подключен второй задатчик сигнала, второй блок умножения, седьмой сумматор, второй вход которого подключен к выходу четвертого сумматора, и третий блок умножения, второй вход которого через первый квадратор подключен к выходу второго датчика скорости, а выход - к третьему входу третьего сумматора, а также датчик массы, выход которого подключен ко вторым входам первого и второго блоков умножения, последовательно соединенные третий датчик скорости, четвертый блок умножения, второй квадратор и пятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - к четвертому входу третьего сумматора, последовательно соединенные второй датчик положения, первый синусный функциональный преобразователь, шестой блок умножения, второй вход которого подключен к выходу датчика массы, и восьмой сумматор, второй вход которого подключен к выходу первого синусного функционального преобразователя, а выход - к пятому входу третьего сумматора, второй вход четвертого блока умножения через второй косинусный функциональный преобразователь подключен к выходу второго датчика положения, последовательно соединенные третий задатчик сигнала, девятый сумматор, второй вход которого подключен к выходу датчика массы, седьмой блок умножения, второй вход которого соединен с выходом второго косинусного функционального преобразователя, восьмой блок умножения, второй вход которого через третий косинусный функциональный преобразователь подключен к выходу третьего датчика положения, и девятый блок умножения, второй вход которого соединен с выходом первого датчика ускорения, а выход - с шестым входом третьего сумматора (см. патент России №2424894, БИ №21, 2011 г.).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому решению.
Недостатком прототипа также является то, что в нем отсутствует полная инвариантность динамических свойств рассматриваемого электропривода к непрерывным изменениям его моментных нагрузочных характеристик, поскольку в нем рассматривается робот с кинематической схемой, имеющей лишь четыре степени подвижности.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение полной инвариантности динамических свойств рассматриваемого электропривода к непрерывным и быстрым изменениям его динамических моментных нагрузочных характеристик при движении конкретного робота с заданной кинематической схемой исполнительного органа по всем его пяти степеням подвижности.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительного сигнала управления, подаваемого на вход электропривода, который обеспечивает формирование моментного воздействия, необходимого для обеспечения полной инвариантности его показателей качества к непрерывно изменяющимся параметрам нагрузки.
Поставленная задача решается тем, что в электропривод робота, содержащий последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и электродвигатель, связанный с первым датчиком 6 скорости непосредственно и через редуктор - с шестерней, приводящей в движение рейку, закрепленную неподвижно на втором телескопическом звене исполнительного органа робота, и первый датчик положения, измеряющий положение этого второго звена относительно его горизонтальной оси вращения, последовательно соединенные релейный блок и третий сумматор, второй вход которого подключен к выходу первого датчика скорости, входу релейного блока и второму входу первого сумматора, а выход - ко второму входу второго сумматора, третий вход которого соединен с выходом первого сумматора, последовательно соединенные первый задатчик сигнала, четвертый сумматор, второй вход которого соединен с выходом первого датчика положения и с первым входом пятого сумматора, подключенного вторым входом к входу устройства, а выходом - к первому входу первого сумматора, шестой сумматор, ко второму входу которого подключен второй задатчик сигнала, второй блок умножения, седьмой сумматор, второй вход которого подключен к выходу четвертого сумматора, и третий блок умножения, второй вход которого через первый квадратор подключен к выходу второго датчика скорости, а выход - к третьему входу третьего сумматора, а также датчик массы, выход которого подключен ко вторым входам первого и второго блоков умножения, последовательно соединенные третий датчик скорости, четвертый блок умножения, второй квадратор и пятый блок умножения, второй вход которого подключен к выходу седьмого сумматора, а выход - к четвертому входу третьего сумматора, последовательно соединенные второй датчик положения, первый синусный функциональный преобразователь, шестой блок умножения, второй вход которого подключен к выходу датчика массы, и восьмой сумматор, второй вход которого подключен к выходу первого синусного функционального преобразователя, а выход - к пятому входу третьего сумматора, второй вход четвертого блока умножения через второй косинусный функциональный преобразователь подключен к выходу второго датчика положения, последовательно соединенные третий задатчик сигнала, девятый сумматор, второй вход которого подключен к выходу датчика массы, седьмой блок умножения, второй вход которого соединен с выходом второго косинусного функционального преобразователя, восьмой блок умножения, второй вход которого через третий косинусный функциональный преобразователь подключен к выходу третьего датчика положения, и девятый блок умножения, второй вход которого соединен с выходом первого датчика ускорения, а выход - с шестым входом третьего сумматора, дополнительно вводятся последовательно соединенные четвертый синусный функциональный преобразователь, подключенный входом к выходу третьего датчика положения, десятый блок умножения, второй вход которого соединен с выходом седьмого блока умножения, и одиннадцатый блок умножения, второй вход которого соединен с выходом второго датчика ускорения, а выход - с седьмым входом третьего сумматора.
Сопоставительный анализ существенных признаков предлагаемого технического решения с существенными признаками аналога и прототипа свидетельствуют о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения обеспечивают высокую точность и устойчивость работы электропривода рассматриваемого робота в условиях существенного изменения его параметров нагрузки.
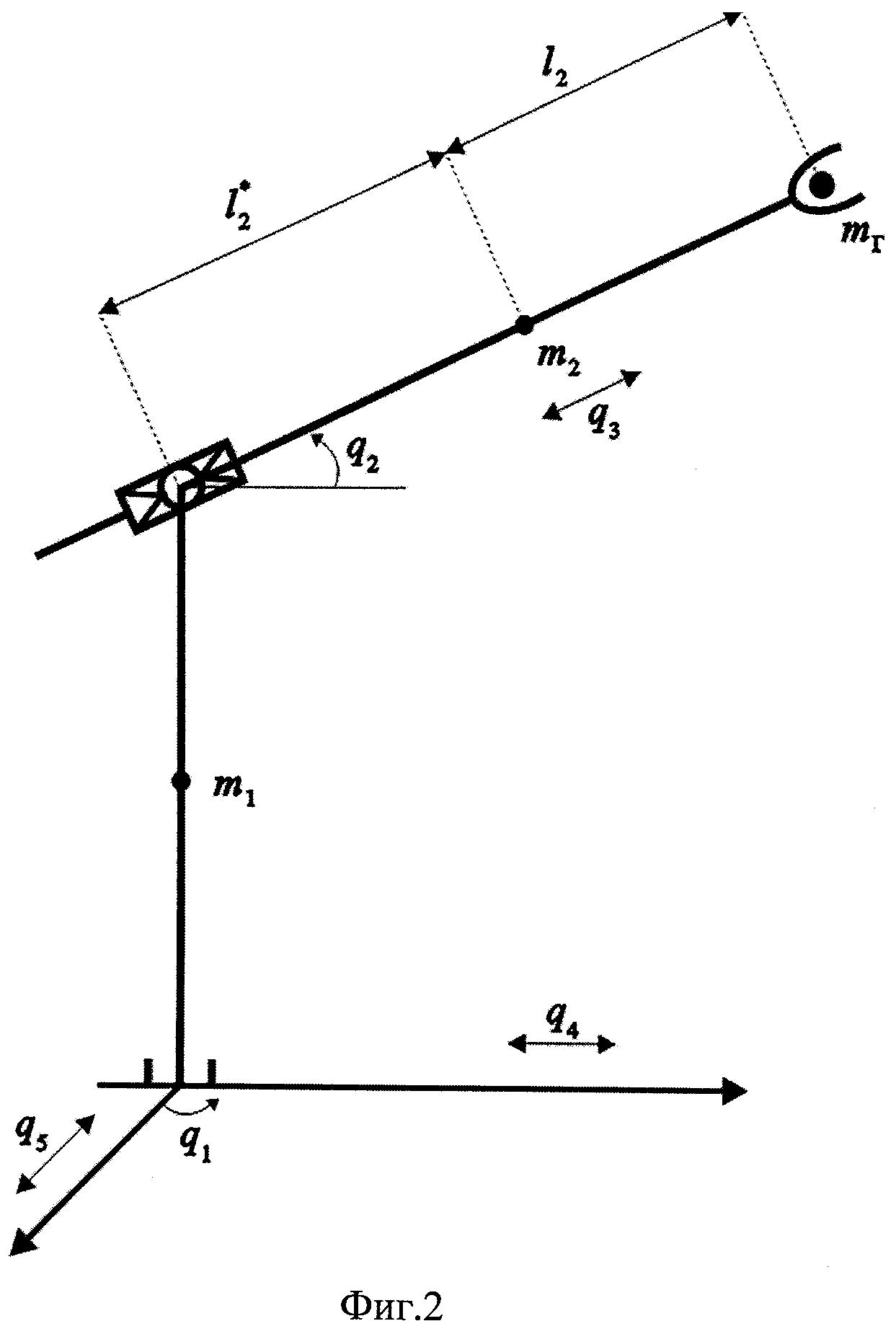
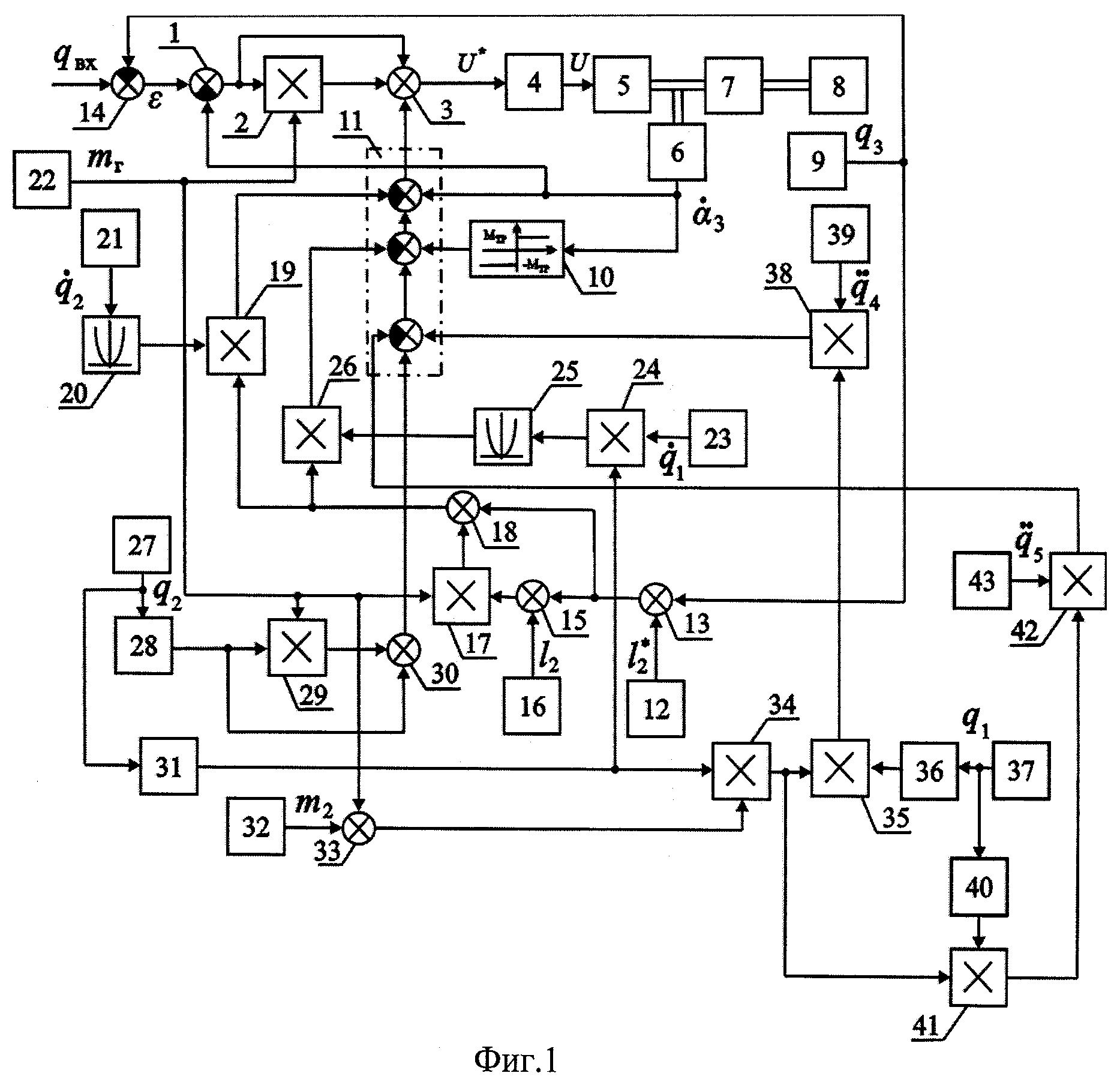
На фиг.1 дана блок-схема предлагаемого электропривода робота, а на фиг.2 - кинематическая схема исполнительного органа этого робота.
Электропривод робота содержит последовательно соединенные первый сумматор 1, первый блок 2 умножения, второй сумматор 3, усилитель 4 и электродвигатель 5, связанный с первым датчиком 6 скорости непосредственно и через редуктор 7 - с шестерней 8, приводящей в движение рейку, закрепленную неподвижно на втором телескопическом звене исполнительного органа робота, и первый датчик 9 положения, измеряющий положение этого второго звена относительно его горизонтальной оси вращения, последовательно соединенные релейный блок 10 и третий сумматор 11, второй вход которого подключен к выходу первого датчика 6 скорости, входу релейного блока 10 и второму входу первого сумматора 1, а выход - ко второму входу второго сумматора 3, третий вход которого соединен с выходом первого сумматора 1, последовательно соединенные первый задатчик 12 сигнала, четвертый сумматор 13, второй вход которого соединен с выходом первого датчика 9 положения и с первым входом пятого сумматора 14, подключенного вторым входом к входу устройства, а выходом - к первому входу первого сумматора 1, шестой сумматор 15, ко второму входу которого подключен второй задатчик 16 сигнала, второй блок 17 умножения, седьмой сумматор 18, второй вход которого подключен к выходу четвертого сумматора 13, и третий блок 19 умножения, второй вход которого через первый квадратор 20 подключен к выходу второго датчика 21 скорости, а выход - к третьему входу третьего сумматора 11, а также датчик 22 массы, выход которого подключен ко вторым входам первого 2 и второго 17 блоков умножения, последовательно соединенные третий датчик 23 скорости, четвертый блок 24 умножения, второй квадратор 25 и пятый блок 26 умножения, второй вход которого подключен к выходу седьмого сумматора 18, а выход - к четвертому входу третьего сумматора 11, последовательно соединенные второй датчик 27 положения, первый синусный функциональный преобразователь 28, шестой блок 29 умножения, второй вход которого подключен к выходу датчика 22 массы, и восьмой сумматор 30, второй вход которого подключен к выходу первого синусного функционального преобразователя 28, а выход - к пятому входу третьего сумматора 11, второй вход четвертого блока 24 умножения через второй косинусный функциональный преобразователь 31 подключен к выходу второго датчика 27 положения, последовательно соединенные третий задатчик 32 сигнала, девятый сумматор 33, второй вход которого подключен к выходу датчика 22 массы, седьмой блок 34 умножения, второй вход которого соединен с выходом второго косинусного функционального преобразователя 31, восьмой блок 35 умножения, второй вход которого через третий косинусный функциональный преобразователь 36 подключен к выходу третьего датчика 37 положения, и девятый блок 38 умножения, второй вход которого соединен с выходом первого датчика 39 ускорения, а выход - с шестым входом третьего сумматора 11, последовательно соединенные четвертый синусный функциональный преобразователь 40, подключенный входом к выходу третьего датчика 37 положения, десятый блок 41 умножения, второй вход которого соединен с выходом седьмого блока 34 умножения, и одиннадцатый блок 42 умножения, второй вход которого соединен с выходом второго датчика 43 ускорения, а выход - с седьмым входом третьего сумматора 11.
На фиг.1 и 2 введены следующие обозначения: qвх - сигнал с выхода программного устройства; ε - сигнал ошибки электропривода; U*, U - соответственно усиливаемый сигнал и сигнал управления электродвигателем 5; q1, q2, q3, q4, q5 - соответствующие обобщенные кординаты исполнительного органа робота;  ,
,  - скорости изменения соответствующих обобщенных координат;
- скорости изменения соответствующих обобщенных координат;  - скорость вращения ротора электродвигателя;
- скорость вращения ротора электродвигателя;  ,
,  - ускорение четвертой обобщенной координаты; m1, m2, mГ - соответственно, массы первого, второго звеньев исполнительного органа и захваченного груза;
- ускорение четвертой обобщенной координаты; m1, m2, mГ - соответственно, массы первого, второго звеньев исполнительного органа и захваченного груза;  - расстояние от оси вращения второго звена до его центра масс при q3=0; l2 - расстояние от центра масс второго звена до средней точки схвата.
- расстояние от оси вращения второго звена до его центра масс при q3=0; l2 - расстояние от центра масс второго звена до средней точки схвата.
В изобретении рассматривается электропривод, который управляет координатой q3, обеспечивая выдвижение второго телескопического звена исполнительного органа робота (см. фиг.2).
Устройство работает следующим образом. Сигнал ошибки 8 с выхода сумматора 14 после коррекции в блоках 1, 2, 3, усиливаясь, поступает на электродвигатель 5, приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от величины поступающего сигнала ε, моментов трения и внешнего моментного воздействия. Электропривод при работе с различными грузами, а также за счет взаимовлияния степеней подвижности исполнительного органа обладает переменными моментными характеристиками, которые могут меняться в широких пределах. Это снижает качественные показатели электропривода и даже приводит к потере устойчивости его работы.
Второе звено исполнительного органа перемещается электроприводом с помощью передачи шестерня-рейка. Причем рейка установлена вдоль второго звена, а шестерня - на выходном валу редуктора 7 электропривода и имеет радиус r. Несложно показать, что в процессе движения исполнительного органа робота, на его второе звено со стороны электропривода действует сила

где g - ускорение свободного падения.
Сила Р3 в процессе движения исполнительного органа создает на выходном валу редуктора 7 момент, равный

С учетом соотношения (1), а также уравнения электрической  и механической
и механической  цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения, рассматриваемый электропривод, управляющий координатой q3, можно описать следующим дифференциальным уравнением
цепей электродвигателя постоянного тока с постоянными магнитами или независимого возбуждения, рассматриваемый электропривод, управляющий координатой q3, можно описать следующим дифференциальным уравнением

где R - активное сопротивление якорной цепи электродвигателя; J - момент инерции его якоря и вращающихся частей редуктора, приведенный к валу электродвигателя; KM - коэффициент крутящего момента; Kω - коэффициент противо-ЭДС; KB - коэффициент вязкого трения; Ky - коэффициент усиления усилителя 4; MCTP - приведенный к валу электродвигателя момент сухого трения; i - ток якоря электродвигателя 5; iP - передаточное отношение редуктора; 

Из уравнения (2) видно, что его параметры, а следовательно, параметры и динамические свойства электропривода, управляющего координатой q3, являются существенно переменными, зависящими от q1, q2, q3,  ,
,  ,
,
,
,  и mГ. В связи с этим для качественного управления координатой q3 необходимо точно компенсировать отрицательное влияние изменения mГ и q1, q2, q3,
и mГ. В связи с этим для качественного управления координатой q3 необходимо точно компенсировать отрицательное влияние изменения mГ и q1, q2, q3,  ,
,  ,
,
,
,  на динамические свойства рассматриваемого электропривода. То есть сформировать такое корректирующее устройство, которое застабилизировало бы параметры этого электропривода так, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
на динамические свойства рассматриваемого электропривода. То есть сформировать такое корректирующее устройство, которое застабилизировало бы параметры этого электропривода так, чтобы он описывался дифференциальным уравнением с постоянными желаемыми параметрами.
Первый положительный вход сумматора 1 (со стороны сумматора 14) имеет единичный коэффициент усиления, а его второй отрицательный вход - коэффициент усиления Kω/Ky. Следовательно, на выходе сумматора 1 формируется сигнал  . Первый и второй положительные входы сумматоров 13 и 15 имеют единичные коэффициенты усиления. На выходах первого 12 и второго 16 задатчиков сигнала соответственно формируются сигналы
. Первый и второй положительные входы сумматоров 13 и 15 имеют единичные коэффициенты усиления. На выходах первого 12 и второго 16 задатчиков сигнала соответственно формируются сигналы  ,
,  . В результате на выходе сумматора 13 формируется сигнал
. В результате на выходе сумматора 13 формируется сигнал  а на выходе сумматора 15 - сигнал
а на выходе сумматора 15 - сигнал  , т.к. датчик 9 измеряет координату q3.
, т.к. датчик 9 измеряет координату q3.
Датчики 37, 27 и 9 установлены соответственно в первой, второй и третьей степенях подвижности исполнительного органа (см. фиг.2) и измеряют величины q1, q2 и q3, соответственно. Датчики 23, 21 и 6 также установлены соответственно в первой, второй и третьей степенях подвижности исполнительного органа (см. фиг.2) и измеряют величины  ,
,  и
и  , соответственно, а датчики 39 и 43 - в четвертой и пятой степенях подвижности исполнительного органа и измеряют величины
,
, соответственно.
, соответственно, а датчики 39 и 43 - в четвертой и пятой степенях подвижности исполнительного органа и измеряют величины
,
, соответственно.
Первый положительный вход сумматора 18 (со стороны блока 17) имеет коэффициент усиления r/iP, a его второй положительный вход - коэффициент усиления rm2/iP. В результате на выходе сумматора 18 формируется сигнал  , на выходе блока 19 - сигнал
, на выходе блока 19 - сигнал  , а на выходе блока 26 - сигнал
, а на выходе блока 26 - сигнал  .
.
Первый (со стороны блока 29) и второй положительные входы сумматора 30 соответственно имеют коэффициенты усиления rg/iP и m2rg/iP. В результате на выходе этого сумматора формируется сигнал rg(m2+mr)sin(q2)/iP.
На выходе задатчика 32 формируется сигнал m2. Первый и второй положительные входы сумматора 33 имеют коэффициенты усиления r/iP. В результате на выходе блока 38 формируется сигнал  , а на выходе блока 42 - сигнал
, а на выходе блока 42 - сигнал  .
.
Выходной сигнал релейного блока 10 имеет вид
где |MT| - величина момента сухого трения при движении.
Первый положительный вход сумматора 11 (со стороны блока 10) имеет единичный коэффициент усиления, второй положительный (со стороны датчика 6) - коэффициент усиления  , третий (со стороны блока 19), четвертый (со стороны блока 26) и седьмой (со стороны блока 42) отрицательные, а также пятый (со стороны сумматора 30) и шестой (со стороны блока 38) его положительные входы имеют единичные коэффициенты усиления. В результате на выходе сумматора 11 формируется сигнал
, третий (со стороны блока 19), четвертый (со стороны блока 26) и седьмой (со стороны блока 42) отрицательные, а также пятый (со стороны сумматора 30) и шестой (со стороны блока 38) его положительные входы имеют единичные коэффициенты усиления. В результате на выходе сумматора 11 формируется сигнал  .
.
Все входы сумматора 3 положительные. Его первый вход (со стороны блока 2) имеет коэффициент усиления  , второй вход (со стороны сумматора 11) - коэффициент усиления R/(KMKy), а третий (со стороны сумматора 1) - коэффициент усиления
, второй вход (со стороны сумматора 11) - коэффициент усиления R/(KMKy), а третий (со стороны сумматора 1) - коэффициент усиления  .
.
В результате на выходе сумматора 3 формируется сигнал

Несложно показать, что поскольку  при движении электропривода достаточно точно соответствует МСТР, то после
при движении электропривода достаточно точно соответствует МСТР, то после
подстановки полученного значения U* (3) в уравнение (2), уравнение (2) преобразуется в уравнение  , с постоянными желаемыми параметрами. То есть заявляемый электропривод, управляющий координатой q3, будет обладать постоянными желаемыми динамическими свойствами и показателями качества.
, с постоянными желаемыми параметрами. То есть заявляемый электропривод, управляющий координатой q3, будет обладать постоянными желаемыми динамическими свойствами и показателями качества.
Способ определения веса судна и аппликаты его центра тяжести
Сеть для мониторинга акватории
Стеновая панель
Сборно-разборная стеновая конструкция
Энергетическая установка
Генератор энергии
Энергетическая установка
Способ изготовления многослойных конструкционных панелей
Способ получения углеродного наноматериала
Способ получения сорбента цезия
Генератор энергии
Генератор энергии
Электромашина
Ветроэнергетическая установка
Генератор энергии
Генератор энергии
Технологическая линия для переработки золошлаковых отходов - продуктов сжигания угольного топлива
Способ криосохранения морских микроводорослей
Судно снабжения подводной нефтедобывающей платформы
Сеть для мониторинга акватории

