Результат интеллектуальной деятельности: АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ С САМОНАСТРОЙКОЙ ДИНАМИЧЕСКОГО КОРРЕКТОРА
Вид РИД
Изобретение
Изобретение относится к системам автоматического регулирования и может быть использовано при построении адаптивных систем управления априорно неопределенными линейными динамическими объектами с относительным порядком передаточной функции, большим единицы.
Наиболее близким техническим решением к предлагаемому является самонастраивающаяся система управления (А.с. 1019400 СССР, Бюллетень открытий и изобретений. - 1983, №19, прототип), содержащая блок задания коэффициентов, последовательно соединенные блок суммирования, первый умножитель, интегратор, второй умножитель, объект регулирования, выходы которого соединены с соответствующими входами блока задания коэффициентов, входы блока суммирования подключены к соответствующим выходам блока задания коэффициентов, выход блока суммирования соединен с первым и вторым входом первого умножителя и вторым входом второго умножителя, выход первого умножителя подключен к входу интегратора, выход которого соединен с первым входом второго умножителя, выход второго умножителя подключен к входу объекта регулирования.
Однако недостатком данной системы является потеря работоспособности в случае управления априорно неопределенными линейными динамическими объектами, относительный порядок передаточной функции которых превышает единицу.
Технической задачей, на решение которой направленно заявленное изобретение, является расширение функциональных возможностей системы, т.е. обеспечение асимптотической устойчивости при управлении априорно неопределенными линейными динамическими объектами с относительным порядком передаточной функции, большим единицы.
Решение поставленной задачи достигается за счет того, что в систему, содержащую блок задания коэффициентов, последовательно соединенные блок суммирования, первый умножитель, интегратор, второй умножитель и объект регулирования, дополнительно вводятся последовательный динамический корректор и функциональный блок, также из системы исключаются блок задания коэффициентов и блок суммирования, при этом выход объекта регулирования соединен с первым и вторым входами первого умножителя и вторым входом второго умножителя, выход первого умножителя подключен к входу интегратора, выход которого соединен с входом функционального блока и первым входом второго умножителя, выход второго умножителя подключен к первому входу последовательного динамического корректора, ко второму входу которого подключен выход функционального блока, выход последовательного динамического корректора соединен с входом объекта регулирования.
За счет введения последовательного динамического корректора и функционального блока обеспечивается асимптотическая устойчивость адаптивной системы в случае управления априорно неопределенными линейными динамическими объектами с относительным порядком передаточной функции, превышающим единицу.
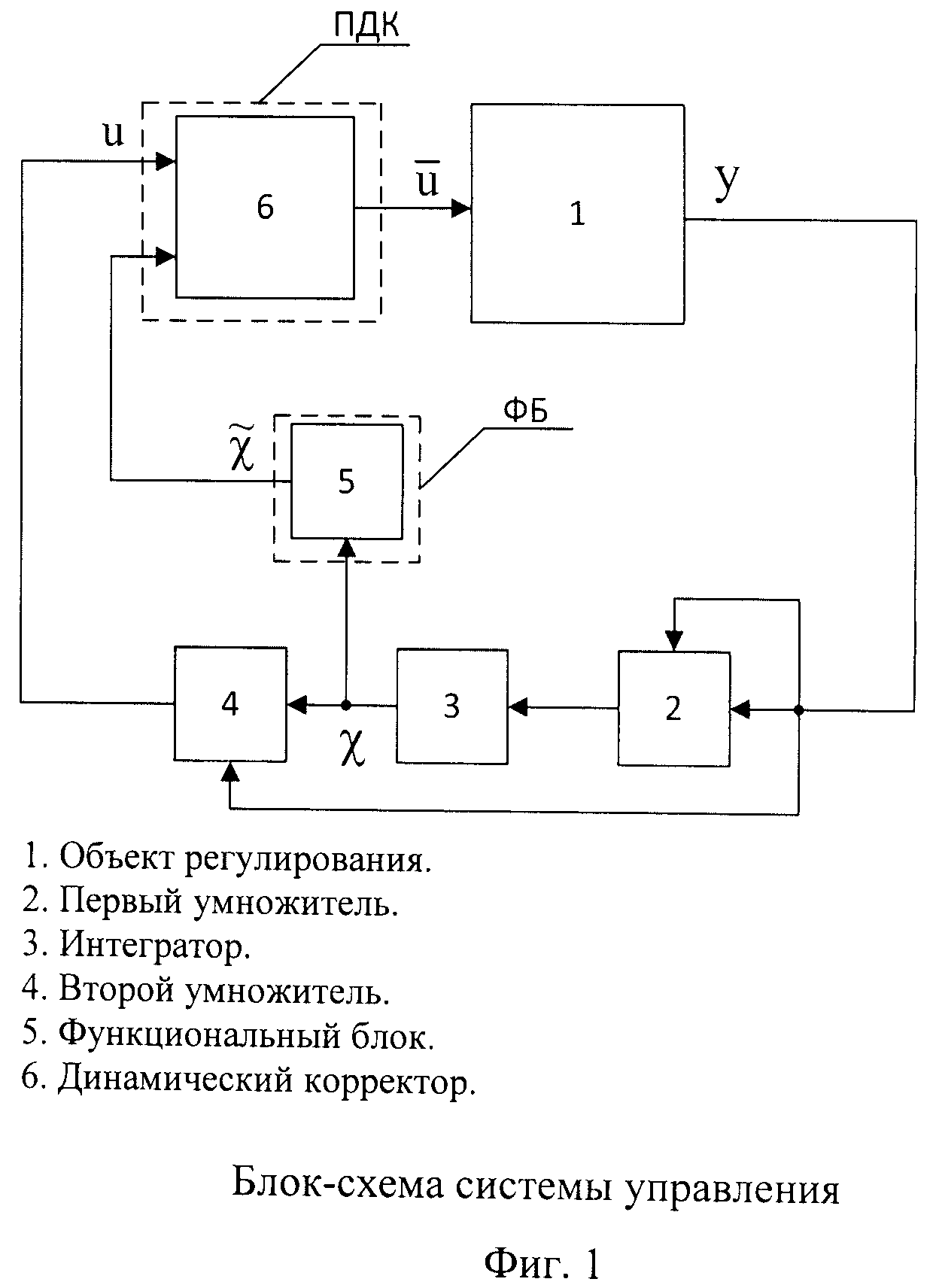
Сущность изобретения поясняется чертежом, где на фиг.1 представлена блок-схема системы управления; на фиг.2 изображена блок-схема функционального блока; фиг.3 иллюстрирует блок-схему последовательного динамического корректора. Система содержит: объект регулирования 1, первый умножитель 2, интегратор 3, второй умножитель 4, функциональный блок 5, последовательный динамический корректор 6, y - выходной сигнал объекта регулирования, χ - сигнал настройки адаптивного регулятора,  - сигнал настраиваемого коэффициента динамического корректора, u - сигнал управления,
- сигнал настраиваемого коэффициента динамического корректора, u - сигнал управления,  - выходной сигнал последовательного динамического корректора.
- выходной сигнал последовательного динамического корректора.
Объект регулирования (OP) имеет относительный порядок ρ=(n-m)>1 и описывается с помощью передаточной функции

где s - комплексная переменная;
α(s) - гурвицев полином степени m;
β(s) - полином степени n с произвольным расположением корней;
αj=αj(ξ), βi=βi(ξ) (j=0, 1, …, m; i=1, 2, …, n) - постоянные числа;
ξ - набор неизвестных параметров, принадлежащих некоторому известному множеству Ξ.
Последовательный динамический корректор (ПДК) состоит из k (k=ρ-1=(n-m)-1) последовательно соединенных быстродействующих упругих звеньев, каждое из которых описывается дифференциальным уравнением

где u(t),  - соответственно входной и выходной сигналы упругого звена;
- соответственно входной и выходной сигналы упругого звена;
T>0 - постоянная времени;
 - параметр, настаиваемый в соответствии с алгоритмом
- параметр, настаиваемый в соответствии с алгоритмом

где ψ0, ψ1>1 - некоторые числа;
χ(t) - настраиваемый коэффициент адаптивного регулятора, заданного соотношением

где y(t) - скалярный выход OP (1).
С помощью критерия гиперустойчивости В.М.Попова можно показать, что реализация алгоритма настройки адаптивного регулятора (4) в виде

где h0>0 - число; обеспечит асимптотическую устойчивость рассматриваемой системы управления.
Система функционирует следующим образом.
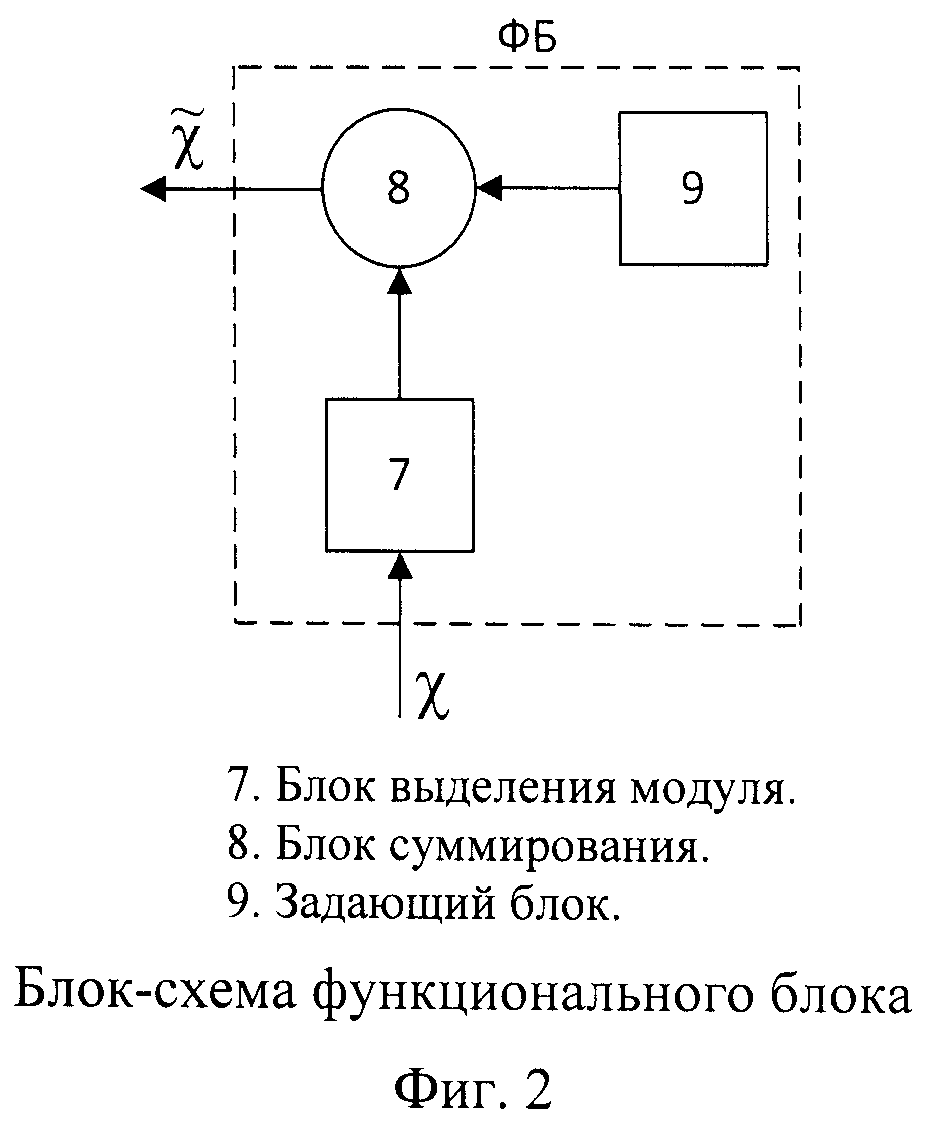
Скалярный сигнал y с выхода OP 1 подается на оба входа первого умножителя 2 и на второй вход второго умножителя 4, выходной сигнал первого умножителя 2 с соответствующим коэффициентом идет на вход и интегратора 3, выходной сигнал которого (χ) одновременно поступает на первый вход второго умножителя 4 и на вход функционального блока (ФБ) 5, сигнал и с выхода второго умножителя 4 идет на первый вход ПДК 6, на второй вход которого подается сигнал  с выхода ФБ 5. Входной сигнал χ ФБ 5 (структурная схема представлена на фиг.2) поступает на вход блока выделения модуля 7, сигнал с выхода которого с соответствующим коэффициентом идет на первый вход блока суммирования 8, на второй вход блока суммирования 8 подается постоянный сигнал с выхода задающего блока 9, сигнал
с выхода блока суммирования 8 поступает на выход ФБ 5.
с выхода ФБ 5. Входной сигнал χ ФБ 5 (структурная схема представлена на фиг.2) поступает на вход блока выделения модуля 7, сигнал с выхода которого с соответствующим коэффициентом идет на первый вход блока суммирования 8, на второй вход блока суммирования 8 подается постоянный сигнал с выхода задающего блока 9, сигнал
с выхода блока суммирования 8 поступает на выход ФБ 5.
Сигнал u с первого входа ПДК 6 (структурная схема представлена на фиг.3) идет на первый вход блока суммирования 101, сигнал
со второго входа ПДК 6 одновременно подается на вторые входы умножителей 11h (h=1, 2, …, k), на первые входы которых поступает сигнал с выхода блоков суммирования 10h, выходные сигналы умножителей 11h одновременно поступают на входы интеграторов 12h и с соответствующими коэффициентами на вторые входы блоков суммирования 13h, выходные сигналы интеграторов 12h поступают на первые входы блоков суммирования 13h и на вторые входы блоков суммирования 10h, сигналы с выходов блоков суммирования 13r (r=1, 2, …, k-1) поступают на первые входы блоков суммирования 10f (f=2, 3, …, k), выходной сигнал блока суммирования 13k подается на выход ПДК 6, сигнал  с выхода ПДК 6 поступает на вход OP 1.
с выхода ПДК 6 поступает на вход OP 1.
Технический результат заключается в расширении функциональных возможностей системы, а именно - в обеспечении асимптотической устойчивости при управлении априорно неопределенными линейными динамическими объектами с относительным порядком передаточной функции, большим единицы.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Адаптивная система управления для априорно неопределенных объектов с самонастройкой динамического корректора, содержащая первый умножитель, интегратор, второй умножитель и объект регулирования, отличающаяся тем, что дополнительно введены последовательный динамический корректор и функциональный блок, при этом выход объекта регулирования соединен с первым и вторым входами первого умножителя и вторым входом второго умножителя, выход первого умножителя подключен к входу интегратора, выход которого соединен с входом функционального блока и первым входом второго умножителя, выход второго умножителя подключен к первому входу динамического корректора, вход функционального блока подключен к входу блока выделения модуля, выход которого соединен с первым вход блока суммирования, второй вход которого подключен к выходу задающего блока, выход блока суммирования соединен с вторым входом динамического корректора, первый вход динамического корректора подключен к первому входу блока суммирования, второй вход динамического корректора соединен со вторыми входами умножителей, первые входы которых подключены к выходам блоков суммирования (кроме последнего), выходы умножителей одновременно соединены с входами интеграторов и вторыми входами последующих блоков суммирования, выходы интеграторов подключены к вторым входам предыдущих блоков суммирования и к первым входам последующих блоков суммирования, выходы которых соединены с первыми входами блоков суммирования, выход последнего блока суммирования соответствует выходу динамического корректора, который соединен с входом объекта регулирования.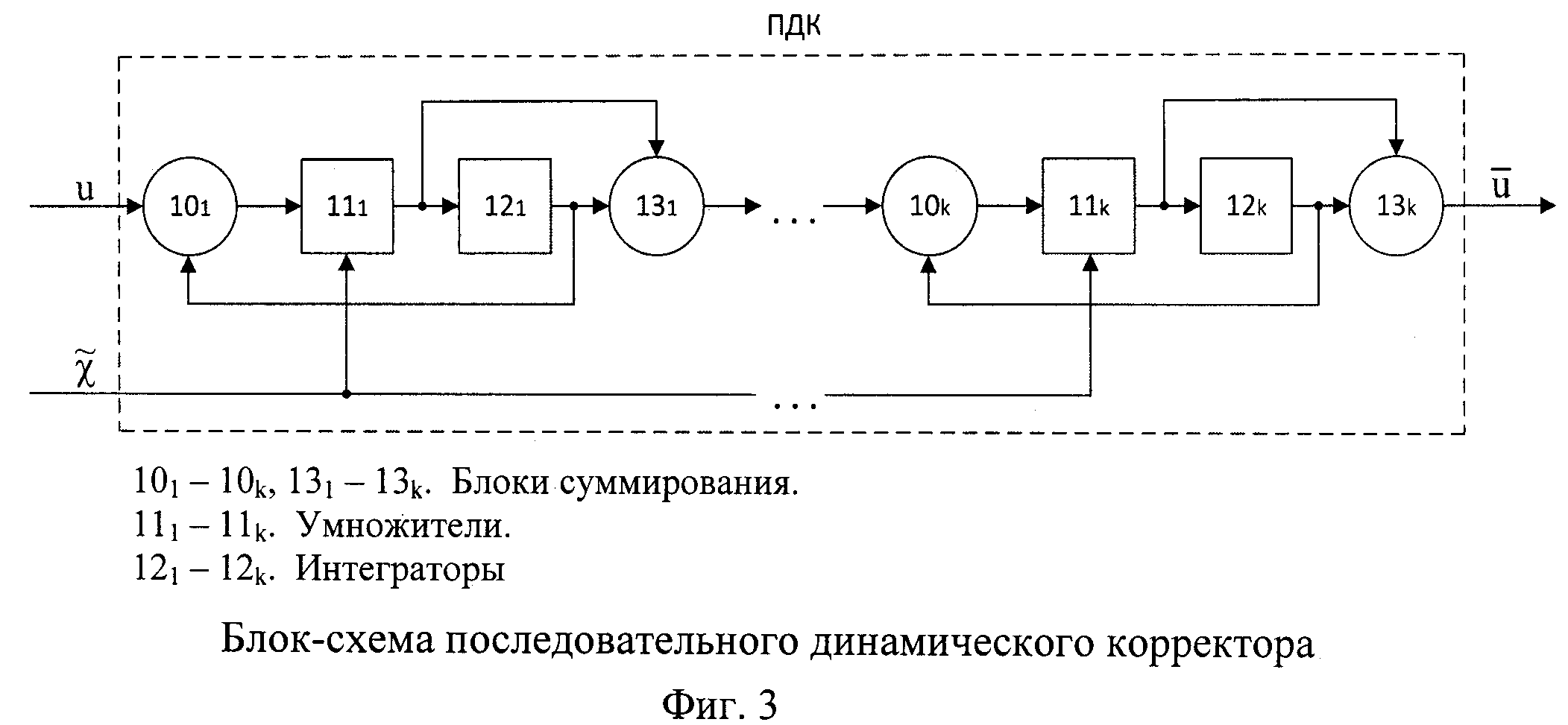
Адаптивная система управления с фильтр-корректором для динамических объектов с периодическими коэффициентами
Способ склеивания рулонных материалов
Гайка
Способ парофазного определения массовой концентрации четыреххлористого углерода, метиленхлорида, хлороформа, 1,2-дихлорэтана, 1.1.2-трихлорэтана в донных отложениях методом газовой хроматографии
Гайка
Способ измерения магнитного поля
Мобильный комплекс по вывозке снега
Заделывающий рабочий орган лесопосадочной машины
Подшипник скольжения
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Многоканальный трубопровод для транспортирования жидкости и/или газа

