Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ПОЛУЧЕНИЯ ДАННЫХ ДЛЯ ПОМОЩИ В ОБНАРУЖЕНИИ СИГНАЛА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Раскрытый способ и устройство относится к беспроводной связи и, более конкретно, к беспроводным системам, которые используют данные для помощи в обнаружении сигнала, чтобы помогать принимающей станции в обнаружении выбранных сигналов.
Уровень техники
Отрасль беспроводной связи разрабатывает службы, которые генерируют информацию о точном местоположении беспроводных терминалов. Разработка частично мотивирована потребностями поставщиков услуг в области общественной безопасности в их усилиях быстро реагировать на экстренные вызовы. Во многих случаях вызывающая сторона может не желать или не иметь возможности предоставлять информацию о точном местоположении. Когда эта информация предоставляется автоматически, власти в области общественной безопасности могут быстро реагировать и предоставлять услугу. В общем, местоположение, в котором объект общественной безопасности принимает экстренные телефонные вызовы '911', называют точкой отклика общественной безопасности (далее "PSAP").
Широко известная система глобального позиционирования (GPS) предлагает один возможный подход к предоставлению определения местоположения беспроводных терминалов. С помощью технологии GPS информация о местоположении и скорости беспроводного терминала может быть определена в рамках требований по точности, необходимых отчетами и предписаниями FCC. Помимо предоставления достаточно точной информации о местоположении мобильного терминала, новые признаки GPS легко интегрируются в беспроводной телефон после того, как технология GPS добавлена в устройство. Дополнительные полезные признаки могут быть использованы, чтобы повысить рыночную ценность беспроводного телефона и увеличить доходы за счет предоставления дополнительных услуг конечным пользователям этих телефонов.
Как широко известно, система навигации GPS использует спутники, которые располагаются на орбите вокруг земли. Любой пользователь GPS в любой точке Земли может получать точную навигационную информацию, включая трехмерное положение, скорость и время суток. Система GPS включает в себя 24 спутника, которые развернуты на круговых орбитах с радиусом 26600 километров в трех плоскостях, наклоненных под углом 55° по отношению к экватору и размещенных с интервалом 120° по отношению друг к другу. Восемь спутников размещены на равном расстоянии в рамках каждого из трех путей орбит. Измерения положения с помощью GPS основаны на измерениях времени задержек на широковещательное распространение GPS-сигналов с орбитальных спутников GPS-приемному устройству. Обычно прием сигналов от 4 спутников необходим для точного определения местоположения в 4 измерениях (широта, долгота, высота над уровнем моря и время). После того, как приемное устройство измерит соответствующие задержки на распространение сигналов, диапазон для каждого спутника вычисляется посредством умножения каждой задержки на скорость света. Местоположение и время находятся посредством решения набора из четырех уравнений с четырьмя неизвестными, содержащими измеренные диапазоны и измененные местоположения спутников. Точные возможности системы GPS поддерживаются с помощью встроенных атомных часов для каждого спутника вместе со станциями слежения, которые постоянно отслеживают и корректируют часы спутников и параметры орбиты. Каждый спутниковый движущийся объект (SV) GPS передает два закодированных кодом прямой последовательности сигнала с расширенным спектром в диапазоне сверхвысоких частот: сигнал L1 с несущей частотой 1,57542 ГГц и сигнал L2 с частотой 1,2276 ГГц. Сигнал L1 состоит из двух фазоманипулированных (PSK) сигналов с расширенным спектром, модулированных в квадратуре (со сдвигом по фазе на 90°): сигнал P-кода (P - "точность"), и сигнал C/A-кода (C/A - "необработанный/обнаружение"). Сигнал L2 содержит только сигнал P-кода. P- и C/A-коды - это повторяющиеся псевдослучайные (также называются псевдошумом, или "PN") последовательности битов (называемые специалистами в области телекоммуникаций "элементами сигнала"), которые модулируются на несущих. Основанная на часах природа этих кодов используется приемным устройством во время проведения измерений задержек по времени. Коды PN для каждого SV уникальны, давая возможность приемному устройству различать, какой спутник передает данный код, даже если они все передаются на одной несущей частоте. Поток данных 50 бит/с, содержащий информацию о состоянии системы и параметры орбиты спутников, полезные для навигационных вычислений, также модулируется на каждой несущей. Сигналы P-кода зашифрованы и, в общем, не доступны для коммерческих и частных пользователей. C/A-сигнал доступен всем пользователям.
Операции, выполняемые приемными устройствами GPS, - это, по большей части, типичные операции, выполняемые приемными устройствами сигналов с расширенным спектром прямой последовательности. Эффект расширения модуляции по PN-коду должен быть устранен из каждого сигнала посредством его умножения на выровненную по времени локально сгенерированную копию кода в процессе, известном как "сужение по спектру". Поскольку маловероятно, что надлежащее выравнивание по времени или задержка по коду известна в момент запуска приемного устройства, она должна быть определена посредством осуществления поиска в ходе первой фазы "обнаружения" работы приемного устройства GPS.
После того, как выполнено сужение по спектру, каждый сигнал состоит из PSK-сигнала 50 бит/с при промежуточной частоте несущей. Точная частота данного PSK-сигнала неизвестна вследствие доплеровского эффекта, вызванного относительным перемещением между спутником и терминальным устройством, а также вследствие локальных ошибок опорных часов GPS приемного устройства. Поиск доплеровской частоты должен выполняться при первоначальном обнаружении сигнала, поскольку она обычно неизвестна до обнаружения сигнала. Демодуляция по несущей может продолжаться после того, как доплеровская частота приблизительно определена.
После выполнения демодуляции по несущей согласование по времени битов данных получается с помощью контура синхронизации битов, и поток данных в итоге распознается. Навигационные вычисления можно осуществлять после того, как были обнаружены и заблокированы сигналы от спутников, проведены вычисления задержек по времени доплеровские вычисления и принято достаточное число (достаточное, чтобы определить опорную синхронизацию GPS и параметры орбиты).
Один недостаток системы GPS определения местоположения - относительно большое время, требуемое, чтобы выполнить обнаружение сигнала. Как упоминалось выше, SV-сигналы не могут отслеживаться до тех пор, пока они не были сначала найдены посредством поиска в двумерном пространстве поиска, измерения которых - это задержка фазы кода и сдвиг доплеровской частоты. Обычно, если нет знания априори о местоположении сигнала в рамках данного пространства поиска, что имеет место после "холодного пуска" приемного устройства, большое число задержек по коду (около 2000) и доплеровских частот (около 15) должно быть найдено для каждого SV-сигнала, который должен быть обнаружен и отслежен. Таким образом, для каждого сигнала должно быть проверено до 30000 местоположений в пространстве поиска. Обычно эти местоположения проверяются последовательно, по одному за раз, в процессе, который может занять от 5 до 10 минут. Время обнаружения дополнительно увеличивается, если опознавательные данные (т.е. PN-коды) четырех спутников в области видимости приемной антенны неизвестны.
Обнаружение сигнала необходимо, по меньшей мере, когда приемное устройство GPS потеряло сигнал, что может произойти, например, после отключения питания или когда сигнал был заблокирован для приемного устройства в течение некоторого периода времени. После обнаружения сигналов они могут быть сохранены или "отслежены".
Тем не менее многие устройства, такие как сотовые телефонные мобильные станции (MS), обладают функциональными возможностями GPS в качестве дополнительного признака или усовершенствования, а не основного назначения устройства. Для этих устройств необходимость постоянно отслеживать SV-сигналы GPS увеличивает стоимость, уменьшает срок службы аккумуляторов или снижает функциональные возможности основного устройства (к примеру, в основном функционирующего как сотовый телефон). Например, поскольку SV-сигналы GPS предоставляются на частотах, которые отличаются от частот сигналов сотового телефона, одно приемное устройство не может одновременно отслеживать обе частоты. Чтобы выполнять это, MS потребуется дополнительное приемное устройство, тем самым увеличивается стоимость устройства. Более того, производительность обработки в системе должна будет быть уменьшена, чтобы параллельно отслеживать оба сигнала, что увеличит как стоимость, так и энергопотребление. Следовательно, многие такие системы редко отслеживают SV-сигналы GPS, а вместо этого обнаруживают требуемые сигналы только по требованию.
Все системы с поддержкой GPS требуют обнаружения SV-сигналов GPS. Некоторые системы только периодически требуют такого обнаружения, тогда как другие требуют обнаружения SV-сигналов GPS каждый раз, когда они нужны для функции GPS. Необходимость обнаружения сигнала, к сожалению, не устраняет срочной потребности в функциях GPS, например, когда местоположение MS требуется быстро, чтобы облегчить реакцию на экстренный вызов. В таких ситуациях задержка по времени, ассоциативно связанная с холодным пуском обнаружения спутникового сигнала GPS, в течение 5-10 минут GPS/беспроводным терминальным устройством до того, как может быть получено определение местоположения, очень нежелательна.
Чтобы уменьшить эту задержку, может быть предоставлена информация, чтобы оказывать помощь приемному устройству в обнаружении конкретного сигнала. Эта информация для помощи в обнаружении дает возможность приемному устройству сужать пространство, в котором должен осуществляться поиск, чтобы находить сигнал, посредством предоставления "кодового окна". Кодовое окно предоставляет меньший диапазон, в рамках которого "фаза кода" (по сути, время поступления сигнала) должна быть обнаружена, либо предсказанный диапазон доплеровского сдвига, связанного с сигналом. Помощь в обнаружении может также включать в себя другую информацию о сигнале, например, его код PN (псевдошум или псевдослучайный), частоту, модуляцию и содержимое. Чем уже окна неопределенностей сигнала, тем быстрее приемное устройство может обнаружить сигнал. Сужение этих окон не только дает возможность более быстрого обнаружения сигналов, что укорачивает задержку до того, как обнаружение местоположения может быть сгенерировано, но также снижает нагрузку по обработке на приемное устройство, что позволяет снизить энергопотребление. Системы, в которых приемные устройства находят сигналы выбора диапазона для определения местоположения (например, SV-сигналы GPS) по требованию с помощью информации, предоставленной от другого источника в рамках системы, обычно называются системами "беспроводного определения местоположения". С момента своего появления системы беспроводного определения местоположения приобрели популярность в качестве предпочтительной технологии определения местоположения. Они применимы в любой системе, где пользовательские терминалы, допускающие измерение сигналов выбора диапазона из заданных источников сигналов, могут осуществлять доступ к базе данных, чтобы получать информацию, облегчающую быстрое обнаружение сигналов выбора диапазона. Помимо прочего, одно из применений - использование беспроводными мобильными станциями (MS) с поддержкой определения местоположения, обменивающимися данными с одной или более базовыми станциями (BS), при этом BS подключены к одному или более серверов баз данных, также называемых модулями определения местоположения (PDE), которые могут предоставлять данные для помощи в обнаружении сигнала.
Информация для помощи в обнаружении сигнала, передаваемая в MS, может включать в себя описание типа сигналов выбора диапазона, доступных MS, и характеристики этих сигналов, например, частоту, смещение PN, ожидаемую фазу кода и т.д. Определение некоторых из этих параметров основано на приблизительном знании местоположения и внутреннего состояния MS. Цель такой информации для помощи в обнаружении - разрешить MS предсказывать время прихода (или фазу кода) конкретного SV-сигнала и доплеровский сдвиг SV-сигнала при необходимости, что в общем может быть названо предсказанием фазы кода. Вопросы включают в себя генерирование, передачу и использование информации для предсказания фазы кода.
Предсказание фазы кода точно ровно настолько, насколько точен ввод параметров для его расчета. Поскольку сдвиг тактового сигнала, положение и перемещение MS относительно источника конкретного сигнала (что требуется) обычно точно неизвестно, предсказываемая фаза кода имеет некоторую неопределенность, которая может быть выражена как окно неопределенности вокруг предсказанной фазы кода и окно неопределенности вокруг предсказанного доплеровского сдвига сигнала.
Системы беспроводного определения местоположения имеют недостаток, выражающийся в задержке вследствие необходимости принимать информацию для помощи в обнаружении сигнала, когда, например, требуются функции GPS. Задержка обусловлена не только временем, необходимым, чтобы обнаруживать требуемые сигналы, но также временем, необходимым, чтобы запрашивать информацию для помощи в обнаружении, обычно от другого объекта в системе телекоммуникаций, для этого объекта, чтобы собирать и предоставлять помощь в обнаружении, и для того, чтобы помощь в обнаружении была принята. Более того, передача информации для помощи в обнаружении негативно влияет на пропускную способность системы связи.
Поэтому существует необходимость в системе и способе, которые позволяют осуществлять точное предсказание фазы кода, используя помощь в обнаружении, при этом снижая нагрузку по обработке и обмену данными на приемные устройства в системах беспроводного определения местоположения.
Сущность изобретения
Описанные в данном документе система и способ включают в себя признаки для передачи информации для помощи в обнаружении пользовательскому терминалу и для обнаружения параметров помощи в обнаружении в сетевой инфраструктуре и пользовательском терминале. Различные аспекты системы и способа направлены на вышеуказанную потребность в обеспечении возможности точного предсказания фазы кода с использованием помощи в обнаружении, при этом снижается нагрузка по обработке и обмену данными на приемные устройства в системах беспроводного определения местоположения. Специалист в данной области техники должен понимать, что различные аспекты описанной системы и способа также предоставляют другие преимущества.
Один аспект включает в себя способ, посредством которого мобильная станция (MS) в сотовой телекоммуникационной системе избегает необходимости принимать информацию для помощи в обнаружении при попытке обнаружить данный сигнал посредством определения того, что ранее полученная информация об обнаружении по-прежнему допустима для использования MS при обнаружении данного сигнала.
Другой аспект включает в себя способ, посредством которого помощь в обнаружении может быть использована, чтобы обнаружить множество сигналов. Первый сигнал множества может быть обнаружен и измерения первого сигнала могут быть использованы, чтобы уточнить данные для помощи в обнаружении, связанные с другими найденными в множестве сигналами.
Еще один аспект включает в себя способ обнаружения сигнала в мобильной станции (MS). Способ включает в себя получение помощи в обнаружении, когда MS находится в первом местоположении, и последующую корректировку полученных данных для помощи в обнаружении в соответствии с перемещением MS в другое новое местоположение.
Дополнительный аспект включает в себя способ определения изменений местоположения MS в сотовой телекоммуникационной системе. Способ использует список базовых станций (BS), удовлетворяющих условиям выбора, которые релевантны для местоположения MS. Способ включает в себя этап сравнения BS, принадлежащих этому списку в одно время, с BS, принадлежащими "тому же" списку (т.е. списку BS, удовлетворяющих тем же условиям выбора) позднее.
Краткое описание чертежей
Варианты осуществления раскрытого способа и устройства показаны на следующих чертежах, в которых одинаковые номера и обозначения ссылок указывают аналогичные или похожие части.
Фиг.1 иллюстрирует типичную базовую геометрию мобильной станции, обслуживающей базовой станции и спутникового движущегося объекта, чей сигнал должен быть обнаружен.
Фиг.2 иллюстрирует множество базовых станций и используется в описании того, как списки базовых станций в рамках мобильной станции могут быть использованы, чтобы сделать вывод о том, что мобильная станция меняла местоположения.
Фиг.3 иллюстрирует поток сообщений для сеанса определения местоположения, инициированного мобильной станицей.
Фиг.4 иллюстрирует поток сообщений для сеанса определения местоположения, завершенного мобильной станицей.
Подробное описание изобретения
Описанные в данном документе система и способ применимы к системам, таким как системы беспроводного определения местоположения, которые используют данные для помощи в обнаружении, чтобы оказывать содействие приемному устройству в обнаружении сигнала. Большинство систем беспроводного определения местоположения могут обнаруживать и использовать сигналы спутникового движущегося объекта (SV) системы глобального позиционирования (GPS). Настоящие SV-сигналы GPS, как описано выше, передают сигналы, имеющие формат, который тесно связан с телекоммуникационными сигналами CDMA. Следовательно, описанная в данном документе примерная система основана на сотовой телекоммуникационной системе CDMA. Тем не менее специалисты в данной области техники должны понимать, что также может быть использован любой другой радиоинтерфейс связи.
Для целей обнаружения сигнала и выбора диапазона информация, связанная с согласованием по времени выбранных сигналов связи, является полезной. Важно узнать, когда ожидать поступление распознаваемого признака данного сигнала, чтобы поиск должен был охватывать только ограниченный промежуток времени, и также важно определить максимально точно время поступления различных сигналов относительно друг друга. Эта последняя информация может быть использована для целей выбора диапазона, как описано ниже. Оба данных вопроса синхронизации включают в себя "время поступления" распознаваемого признака сигнала.
Специалисты в области систем связи должны понимать, что это время поступления информации в большинстве случаев эквивалентно "фазе кода" сигнала. "Фаза кода" описывает согласование по времени поступившего сигнала с точки зрения сдвига по фазе между принятым кодом и тем же кодом, начинающимся в опорный момент времени. Таким образом, определение "фаза кода" сигнала эффективно определяет "время поступления" сигнала, требуя только умножения фазы сдвига кода на частоту сигнала, чтобы получить время поступления. Эти два показателя связаны настолько тесно и несложно, что "время поступления" практически взаимозаменяемо с "фазой кода". Терминология "времени поступления" частот часто используется в системах определения местоположения, в частности, в системах, которые не разделяют аспекты "кода" систем связи.
Описанные в данном документе система и способ могут быть свободно использованы всеми беспроводными системами. Сигналы, которые должны быть обнаружены для целей выбора диапазона, не ограничены сигналами CDMA, а могут включать в себя множество других типов. Сигналы выбора диапазона также не ограничены SV-сигналами GPS. Например, сигналы базовой станции (BS), как правило, используются для выбора диапазона, и сигналы выбора диапазона не должны быть коммуникационными. Тем не менее описанной в данном документе системой является система связи CDMA, а "фаза кода" более часто используется в отношении таких систем. Специалисты в данной области техники должны понимать взаимосвязанную природу этих терминов и не будут испытывать трудности при использовании понятий, описанных с помощью одного из этих терминов, в системе, в которой другой термин применяется более часто.
Следующие обозначения могут быть использованы в данном описании:
- R - радиус области неопределенности местоположения MS
-  - смещение тактового SV-сигнала
- смещение тактового SV-сигнала
-  - ожидаемое смещение тактового сигнала BS
- ожидаемое смещение тактового сигнала BS
-  - неопределенность в смещении тактового сигнала BS
- неопределенность в смещении тактового сигнала BS
-  - смещение тактового сигнала MS
- смещение тактового сигнала MS
-  - ожидаемое смещение тактового сигнала MS
- ожидаемое смещение тактового сигнала MS
-  - неопределенность в смещении тактового сигнала MS
- неопределенность в смещении тактового сигнала MS
-  - ожидаемая разность в задержке по времени между GPS и CDMA-каналом приема MS
- ожидаемая разность в задержке по времени между GPS и CDMA-каналом приема MS
-  - неопределенность в ожидаемой разности в задержке по времени между GPS и CDMA-каналами приема MS
- неопределенность в ожидаемой разности в задержке по времени между GPS и CDMA-каналами приема MS
-  - ожидаемый уход частоты MS
- ожидаемый уход частоты MS
-  - неопределенность в ожидаемом уходе частоты MS
- неопределенность в ожидаемом уходе частоты MS
-  - доплеровский SV
- доплеровский SV
-  - угол возвышения SV
- угол возвышения SV
- c - скорость света
- fc - скорость передачи элементов сигнала (fc =1,023 МГц для C/A-кода GPS)
-  - вектор, указывающий от BS на MS
- вектор, указывающий от BS на MS
-  - вектор, указывающий от BS на SV
- вектор, указывающий от BS на SV
-  - вектор, указывающий от MS на SV
- вектор, указывающий от MS на SV
В современных системах данные для помощи в обнаружении сигналов космического аппарата (SV) системы глобального позиционирования (GPS) предоставляются мобильной станции (MS). Точные процедуры предоставления данных для помощи в обнаружении заданы в различных стандартах передачи сигналов определения местоположения, таких как, например, TIA/EIA IS-801-1. По меньшей мере, некоторые из этих стандартов не могут предоставлять способы передачи аналогичной информации для помощи в обнаружении, касающейся сотовых BS. Хорошо известно, что сигналы, отличные от SV-сигналов GPS, например, пилот-сигналы сотовой BS, также могут быть использованы в качестве источников сигналов выбора диапазона. До настоящего времени эффективность не рассматривалась как серьезная. Это обусловлено тем, что информация для помощи в обнаружении BS обычно предоставляется MS посредством других беспроводных способов передачи сигналов, например, в виде сообщения списка соседних элементов в TIA/EIA IS-2000. Эта помощь в обнаружении тем не менее специально предназначена, чтобы облегчать прозрачную передачу вызовов в беспроводной сети, а не облегчать измерения определения местоположения. Хотя используемые методики помощи в обнаружении предоставляют не оптимальную производительность, их эффективность может быть повышена посредством добавления неявной помощи в обнаружении BS в сообщения определения местоположения. Дополнительно дополнительная неявная помощь в обнаружении в сообщениях определения местоположения также облегчает реализацию других усовершенствований в системах беспроводного определения местоположения.
Помощь в обнаружении доплеровского сдвига сигнала
Следующий относительно простой способ может быть использован, чтобы предоставлять помощь в обнаружении сигналов. Поскольку предсказываемая доплеровская частота не обязательно должна быть известной с большой точностью MS, поиск смещения доплеровской частоты SV-сигнала может быть сужен с помощью следующего способа.
Предсказываемая доплеровская частота, D, может быть получена как:
 (1)
(1)
а окно WD поиска доплеровской частоты может быть рассчитано как:
 (2)
(2)
где q1 - это коэффициент, учитывающий неопределенность местоположения. Обычно используется q1= 10-3 Гц/м.
Простой способ помощи с помощью фазы кода
Фиг.1 иллюстрирует MS 102, обменивающуюся данными с обслуживающей BS (или базовой передающей станцией, BTS) 104. Обмен данными MS с BS 104 подразумевает, что MS 102 находится в зоне покрытия BS 104. Если обслуживающая антенна 106 работает непосредственно с обслуживающей базовой станцией, как показано (например, не предусмотрен повторитель в канале связи), то соответствующая первая оценка зоны покрытия BS 104 - это окружность, центрированная антенной 106 BS. Эта зона покрытия, в свою очередь, совмещается с областью неопределенности местоположения MS 102. В этом случае предсказание фазы кода (т.е. центр окна фазы кода) и неопределенность в предсказании фазы кода (т.е. размер окна фазы кода) для сигнала 108 между антенной 110 SV 112 и антенной 114 MS 102 может быть легко определено посредством геометрии, используя любые подходящие методики вычисления, например, изложенные в патенте США 6429815. Максимальная фаза 116 кода соответствует расстоянию от SV 112 до самой дальней точки обслуживающей соты 118, тогда как минимальная фаза 120 кода соответствует ближайшей точке обслуживающей соты 118 к SV 112.
MS анализирует фазу P кода, которая может быть выражена как:
 . (3)
. (3)
Предсказанная фаза  кода может быть выражена как:
кода может быть выражена как:
 , (4)
, (4)
а размер окна, W, может быть выражен как:
 . (5)
. (5)
Вычисленные параметры предсказания фразы кода, P и W, могут быть переданы MS от BS с помощью существующих форматов сообщений для передачи сигналов сотовой связи. Заметим, что строка на фиг.1, иллюстрирующая фактическую фазу 108 кода, соответствует
. Строка 122, показывающая сигнал (помощь) от антенны 106 BS к антенне 114 MS, также показывает вектор диапазона
.
- это вектор от антенны 106 BS к антенне 110 SV, что не проиллюстрировано соответствующей строкой на фиг.1.
Этот простой способ хорошо действует до тех пор, пока сдвиг тактового сигнала (смещение тактового сигнала) в MS и SV известны. Сдвиг (смещение) тактового SV-сигнала может быть определен из эфемеридных параметров, доступных модулю определения местоположения (PDE) беспроводной системы (не показан на фиг.1). Сдвиг (смещение) тактового сигнала MS также может быть доступен, например, если он был сохранен после вычисления в ходе предыдущего успешного измерения определения местоположения. Тем не менее ранее определенный сдвиг тактового сигнала MS по-прежнему может быть недопустим. Определив, что сдвиг (смещение) тактового сигнала MS доступен, его можно проверить на достоверность посредством сравнения времени с того момента, как были получены данные, с информацией о погрешности тактовой частоты. Если сохраненные данные указывают, что погрешность тактовой частоты незначительна либо если точная информация дает возможность погрешности частоты быть скорректированной, то значение сдвига тактового сигнала MS (скорректированное) может быть рассмотрено как допустимое. Если сдвиг тактового сигнала MS неизвестен достоверно, то окно W фазы кода может быть расширено посредством дополнительного ненулевого коэффициента погрешности,
(неопределенность смещения тактового сигнала MS), как показано в уравнении (5). Согласно существующему формату сообщений в применении стандарта CDMA, одно значение должно быть передано от PDE к MS, представляющее общий размер окна поиска.
Дополненный способ помощи с помощью фазы кода
Беспроводные системы, такие как IS-95, IS-2000 или IS-856, в которых BS синхронизируются со временем GPS, предлагают преимущество наличия MS, также приблизительно синхронизированных со временем GPS. В этих случаях смещение тактового сигнала MS обусловлено, главным образом, сдвигом системного времени BS в сочетании с задержкой на распространение сигнала от BS к MS. Фаза P кода, полученная MS, может быть выражена следующим образом:
 (6)
(6)
Набор параметров для помощи в фазе кода, который может быть использован, чтобы сгенерировать минимальный размер окна фазы кода для данного набора доступных данных, желателен и может быть получен следующим образом. Для каждой точки в области неопределенности местоположения MS вычислите значение P согласно уравнению (6) и определите минимум и максимум этих значений, обозначенный как  и
и  , из всех точек в области неопределенности. Затем параметры для помощи в фазе кода могут быть вычислены как
, из всех точек в области неопределенности. Затем параметры для помощи в фазе кода могут быть вычислены как
 , (7)
, (7)
и
 . (8)
. (8)
Заметим, что W, вычисленный согласно уравнению (8), уже учитывает компонент неопределенности смещения тактового сигнала MS, которая обусловлена задержкой в распространении сигнала от BS к MS. Следовательно, дополнительные коэффициенты погрешности  и
и  должны учитывать только неопределенность в аппаратных задержках BS и MS. Для четко настроенной MS
может часто рассматриваться как нулевой. Неопределенность в смещении тактового SV-сигнала также обычно небольшая и для многих целей может рассматриваться как нулевая.
должны учитывать только неопределенность в аппаратных задержках BS и MS. Для четко настроенной MS
может часто рассматриваться как нулевой. Неопределенность в смещении тактового SV-сигнала также обычно небольшая и для многих целей может рассматриваться как нулевая.
Генерирование набора оптимизированных параметров для помощи в обнаружении посредством нахождения максимума и минимума из всех точек в области неопределенности вычислительно неудобно, однако могут быть использованы упрощения с небольшой потерей точности. Например, хотя P - это непрерывная функция местоположения MS, практический поиск ограничен конечной длиной шага посредством таких коэффициентов, как длина элемента сигнала и разрешение выборки. Следовательно, поиск может быть ограничен точками сетки, в которой соседние узловые точки сетки разделены  , где q2 - это приблизительно выбранная константа, например, q2 = 4. Другой подход к уменьшению вычислительной нагрузки - использовать алгоритм итеративного поиска, например, итерации Ньютона.
, где q2 - это приблизительно выбранная константа, например, q2 = 4. Другой подход к уменьшению вычислительной нагрузки - использовать алгоритм итеративного поиска, например, итерации Ньютона.
Пространство поиска может быть уменьшено посредством принятия во внимание следующего замечания. Можно показать, что минимальное и максимальное значения,
и
, возникают где-то на периметре области неопределенности местоположения MS. Следовательно, поиск внешних значений может быть ускорен посредством ограничения поиска периметром. Заметим, что, в общем, область неопределенности - это трехмерный объект, и, таким образом, поиск должен быть выполнен на "поверхности".
Графическое понимание одного способа, в котором может быть использован предшествующий способ, чтобы уменьшить вычисляемый размер окна фазы кода, может быть достигнуто посредством рассмотрения предельного случая. Векторы
и
r являются параллельными, но указывающими в противоположных направлениях, когда SV может быть "виден" за BS посредством просмотра из местоположения MS (обычно влекущего за собой SV небольшого возвышения). Неопределенность фазы кода - это, по сути, ноль вдоль линии, заданной такой геометрией. Это обусловлено тем, что фаза кода от MS к BS и от MS к SV должна отличаться ровно последовательно. По мере того, как MS перемещается на большое расстояние от BS, смещение тактового сигнала MS увеличивается на добавляемую задержку. Это изменение в тактовом сигнале MS точно равно увеличению в фактической фазе кода SV-сигнала, сводя ее к нулю с позиции MS. Анализируя вторую часть уравнения 6, величины двух векторов складываются геометрически к константе, а оставшиеся величины являются константой или незначительны. Таким образом, полученная фаза P кода, независима от расстояния от MS до SV. Другими словами, окно W фазы кода может быть уменьшено до нуля, даже несмотря на то, что ни неопределенность местоположения MS, ни неопределенность смещения тактового сигнала MS не равны нулю.
Хотя W уменьшено до нуля только вдоль линии, проходящей от антенны BS непосредственно вдаль от SV, чей сигнал ищется, принцип приводит к уменьшению W для всех местоположений MS за исключением находящихся вдоль линии между BS и SV. Следовательно, улучшенный способ помощи с помощью фазы кода предпочтительнее, чем простой способ, описанный ранее, поскольку, в общем, он обеспечивает меньшие размеры окон поиска. Заметим, что эта методика может быть распространена на другую BS, отличную от обслуживающей BS (которая определяет смещение тактового сигнала MS), если имеет место то, что эта другая BS по большей части находится на одной линии с SV, чей сигнал ищется. Для этой цели измерение пилот-сигнала этой другой BS предоставляет измерение, которое может быть использовано, чтобы компенсировать смещение тактового сигнала MS. По сути, другая BS может быть использована в качестве источника тактового сигнала для целей обнаружения конкретного SV.
Улучшение оценок с помощью неполных измерений
В практических системах обнаружение ряда SV-сигналов выполняется параллельно. Тем не менее измерения всех требуемых SV-сигналов обычно не стараются выполнять одновременно из-за ограниченных аппаратных ресурсов. Даже если операции поиска нескольких сигналов инициируются одновременно, некоторые SV будут обнаружены ранее, чем другие, так как их положение в окне фазы кода назначено для поиска раньше или так как они требует меньше времени на интеграцию, или с учетом обоих факторов. Этот факт может быть использован при поиске, чтобы обнаружить множество сигналов, посредством постепенного уплотнения окон поиска для необнаруженных к данному моменту сигналов на основе измерений одного или более сигналов, которые уже были обнаружены в результате поиска.
Хорошая аппроксимация смещения тактового сигнала MS может быть достигнута после проведения одного измерения SV, если SV находится приблизительно под углом возвышения α = 90° и известны высота над уровнем MS и BS. Заметим, что высота над уровнем моря BS (более точно, высота над уровнем моря антенны BS) обычно известны, а высота над уровнем моря MS может быть хорошо аппроксимирована из данных для помощи в определении высоты над уровнем моря. Верхний спутник также вероятно имеет относительно сильный сигнал, который легко отличим MS, и следовательно, может быть полезно постараться обнаружить сигнал из этого SV первым, когда ищется группа SV-сигналов.
Когда SV находится приблизительно под углом возвышения α = 90°, мы имеем
 , (9)
, (9)
где  - это высота над уровнем моря MS, а
- это высота над уровнем моря MS, а  - это ожидаемая высота над уровнем моря (Заметим, что в
- это ожидаемая высота над уровнем моря (Заметим, что в  высота над уровнем моря BS корректируется, чтобы быть такой же, как ожидаемая высота над уровнем моря MS). Допустим также, что BS использует уравнение (4), с
= 0, при вычислении
высота над уровнем моря BS корректируется, чтобы быть такой же, как ожидаемая высота над уровнем моря MS). Допустим также, что BS использует уравнение (4), с
= 0, при вычислении  . Далее из уравнений (3), (4) и (9) фактическое смещение тактового сигнала MS
. Далее из уравнений (3), (4) и (9) фактическое смещение тактового сигнала MS  может быть вычислено как
может быть вычислено как
 . (10)
. (10)
После того, как смещение тактового сигнала MS определено, дополнительный коэффициент погрешности, fc
, который был ранее включен в W, может быть удален или, по меньшей мере, уменьшен до тех пор, пока значение неопределенности смещения тактового сигнала MS явно известно. Следовательно, время поиска оставшихся SV-сигналов может быть уменьшено. Чтобы выполнить это последовательное уменьшение W в MS, коэффициент погрешности  должен быть передан из PDE в MS как отдельное значение, а не включен в общий размер окна поиска, как предлагается уравнением (5). Это требует небольшого изменения в существующие форматы сообщений, заданные в настоящее время современными стандартами.
должен быть передан из PDE в MS как отдельное значение, а не включен в общий размер окна поиска, как предлагается уравнением (5). Это требует небольшого изменения в существующие форматы сообщений, заданные в настоящее время современными стандартами.
Постепенное уменьшение окон поиска в MS, основанное на неполных измерениях SV, лучше всего действует, если оценка смещения тактового сигнала  , используемого PDE, также доступна для MS. В примере выше это было достигнуто посредством задания
= 0. Передача значения
в явном виде MS - это оптимальное решение для произвольных значений
, но требует еще одного небольшого изменения в существующее сообщение передачи сигналов.
, используемого PDE, также доступна для MS. В примере выше это было достигнуто посредством задания
= 0. Передача значения
в явном виде MS - это оптимальное решение для произвольных значений
, но требует еще одного небольшого изменения в существующее сообщение передачи сигналов.
Таким образом, неполное обнаружение списка сигналов может быть использовано, чтобы уменьшить компонент неопределенности в тактовом сигнале MS оценки фазы кода или окна неопределенности. Это может быть особенно полезно, с одной стороны, если данные, доступные вычислительному объекту (например, MS), явно включают в себя компонент неопределенности тактового сигнала MS, и когда уже обнаруженный сигнал из списка поиска исходит из SV, который находится практически непосредственно над станцией. С другой стороны, геометрические факторы могут значительно снизить W для SV-сигналов, передаваемых SV, которые находится на небольших возвышениях, когда MS и SV располагаются на противоположных сторонах BS, принятой MS. Как указывалось выше, любая измеряемая BS может быть использована для этой цели¸ если расчеты MS откорректированы, чтобы быть "как есть", на основе пилот-сигнала этой измеряемой BS. Помимо этих методик, другие подходящие навигационные методики могут быть использованы с неполными измерениями, чтобы уточнять помощь в обнаружении для последующих обнаружений сигналов.
Минимизация размера окна фазы кода
Дополнительные элементы информации об обнаружении
MS может быть запрограммирована, чтобы вычислять прогностические параметры фазы кода, а не просто принимать их посредством BS от другого объекта в системе, например, PDE. Для этой цели помощь в обнаружении, предоставляемая MS, может преимущественно включать в себя информационные элементы, описывающие геометрию совокупности BS и SV относительно ожидаемого местоположения MS. Некоторые из этих информационных элементов не включены в сообщения для помощи в обнаружении сигнала от BS к MS, заданный, по меньшей мере, некоторыми современными стандартами. Передача этих дополнительных данных, может быть, по меньшей мере, частично компенсирована посредством опускания информации о размере окна поиска точной фазы кода и размере окна поиска доплеровского сдвига как части данных для помощи, так чтобы суммарный эффект на воздушную передачу сигналов был незначительным.
Полезные информационные элементы, которые не включены в некоторые сотовые телекоммуникационные стандарты для помощи в обнаружении, делятся на несколько категорий. Любое сочетание изложенных ниже информационных элементов может быть использовано в конкретной реализации согласно обычным техническим факторам, чтобы помочь снизить размеры окон вычисляемой фазы кода. Первая такая категория помечена "информация для помощи в обнаружении SV-сигнала", которая должна быть получена от обслуживающей BS посредством принимающей MS. Эта категория может включать в себя, например, следующую информацию:
1. Идентификатор(ы) PRN-последовательности SV-сигналов.
2. Ожидаемое относительное положение SV и MS (
), которое может быть описано как: (a) расстояние между ожидаемым местоположением SV и MS, и (b) азимут и возвышение SV в данной системе координат при наблюдении из ожидаемого местоположения MS.
3. Значение(я) смещения тактового сигнала SV (bSV) (тем не менее, поскольку этот показатель обычно небольшой по сравнению с минимальным размером окна поиска, эквивалентным одному элементу сигнала необработанный/обнаружение (C/A), альтернативно он может быть опущен или может быть использован как корректирующий показатель к расстоянию от SV до MS после масштабирования с помощью c).
4. Информация о доплеровской частоте SV (fSV) при наблюдении из ожидаемого местоположения MS, включая коэффициенты для производных первого, второго и даже более высокого порядка уравнения для доплеровской частоты, которая может быть включена, чтобы дать возможность MS экстраполировать фазу кода и доплеровские прогнозы на будущее время.
Вторая категория информационных элементов, которые могут быть полезно включены в сообщения с запросами помощи в обнаружении, если отсутствуют, помечена "информация для помощи в обнаружении сигнала BS", которая должна быть принята обслуживающей BS от MS. Эта категория информации может включать в себя, например:
1. идентификатор(ы) PRN-последовательности пилот-сигналов;
2. ожидаемое относительное положение обслуживающей BS и MS ( ), которое может быть описано как: (a) расстояние между ожидаемым местоположением BS и MS, и (b) азимут BS в данной системе координат при наблюдении из ожидаемого местоположения MS;
), которое может быть описано как: (a) расстояние между ожидаемым местоположением BS и MS, и (b) азимут BS в данной системе координат при наблюдении из ожидаемого местоположения MS;
3. смещение тактового сигнала BS ( ); или
); или
4. неопределенность смещения тактового сигнала BS (
).
"Неопределенность местоположения MS" - это третья категория полезных информационных элементов, описывающих область вокруг ожидаемого местоположения MS. Элементы информации в данной категории могут быть приняты от BS или вычислены в MS. Эти элементы могут включать в себя, например:
1. трехмерный (3-D) эллипсоид неопределенности, эквивалентный трехмерной ковариационной матрице; или
2. двумерный эллипс неопределенности вместе с вертикальным значением неопределенности.
Эти два элемента обычно должны быть использованы альтернативно, а не параллельно.
"Информация об ожидаемом тактовом сигнале MS" - это четвертая категория полезных информационных элементов, которые могут быть полезно включены в сообщения с запросами помощи в обнаружении, если отсутствуют, и могут быть приняты MS от BS либо вычислены в MS. Эта категория информации может включать в себя, например:
1. смещение тактового сигнала MS (
);
2. неопределенность смещения тактового сигнала MS (
);
3. уход тактовой частоты MS (
);
4. неопределенность ухода тактовой частоты MS ( ); или
); или
5. время допустимости для оценки смещения тактового сигнала MS (To), которым может быть, например, либо явное значение, либо опорный номер, такой как номер последовательности измерений, относящийся к опорному моменту времени предыдущего измерения, сохраненный в MS.
"Информация о градуировке MS" - это пятая категория полезных информационных элементов, которые могут быть включены в сообщения с запросами помощи в обнаружении, если отсутствуют, чтобы облегчить вычисления фазы кода и окна. Эти элементы могут быть сохранены в MS. Данная категория информации может включать в себя, например:
1. разность в ожидаемой задержке по времени между GPS и CDMA-каналом приема в MS ( ), или
), или
2. неопределенность ожидаемой разности в задержке по времени между GPS и CDMA-каналом приема MS (
).
Один пример информационных сообщений и протоколов, которые могут быть использованы в связи со способом и устройством, изложенными в данном документе, подробно описан в прилагаемом Приложении A (озаглавленном "Общее сообщение для помощи в обнаружении"). Прилагаемое сообщение об общей помощи в обнаружении описывает конкретные сообщения, форматы и протоколы, которые включены в CDMA-стандарт IS-801-A и показывает изменения в этих сообщениях, форматах и протоколах, которые предложены, чтобы облегчить улучшенное беспроводное определение местоположения в соответствии с методологиями данного документа.
Способы вычисления данных для помощи в обнаружении для MS
После приема надлежащей информации, такой как изложенная выше, MS может вычислить оценки и окна неопределенности фазы кода согласно способу, изложенному далее в данном документе. Способ использует термин "SV-сигнал" для сигналов, которые должны быть обнаружены или измерены, поскольку это установившаяся практика и геометрически просто. Тем не менее любой сигнал, обнаружение которого ведется, может быть рассмотрен, как изложено для "SV-сигнала" набора, который должен быть измерен в способе ниже. Все процедуры для других сигналов, которые должны быть измерены, таких как неотслеживаемые сигналы BS, большей частью аналогичны или идентичны указанным ниже, так что специалист в данной области техники легко модифицирует расчеты для этих других сигналов без необходимости явных инструкций в данном документе. Следовательно, помощь в обнаружении (к примеру, оценки и окна фазы кода) может быть легко рассчитана для других сигналов, таких как сигналы BS, которые затем могут быть легко обнаружены. Эти другие сигналы могут выполнять многие из тех целей, что и SV-сигналы, например, выбор диапазона и определение местоположения, и фактически могут полностью заменить SV-сигналы при необходимости.
Далее приведен примерный алгоритм этапов, которые могут быть предприняты MS, чтобы получить и обновить данные для помощи в обнаружении, необходимые, чтобы обнаруживать набор сигналов (обычно SV-сигналов). Алгоритм главным образом включает в себя чувствительные ко времени данные. Не чувствительные ко времени параметры также необходимы для обнаружения сигналов, например, PN-код и частота сигнала, но эти параметры обычно не рассматриваются данным алгоритмом. Помощь, которая в конечном счете требуется для обнаружения конкретного сигнала, включает в себя оценку фазы кода (или времени поступления) и размер окна неопределенности вокруг этой оценки, наряду с оценкой и окном неопределенности доплеровской частоты для конкретного сигнала. Следующий алгоритм обычно указывает этапы, которые предпринимаются MS, хотя этапы могу альтернативно быть выполнены другими объектами. MS обычно вычисляет "окончательные" данные для помощи в обнаружении (фазу кода, доплеровский сдвиг и соответствующие окна неопределенности). Этот расчет выполняется на основе параметров данных для помощи в обнаружении, принятых от удаленного объекта (например, PDE), а также параметров данных для помощи в обнаружении, которые могли быть получены ранее посредством вычисления в рамках MS, и в некоторых случаях основанные дополнительно на измерениях, выполненных MS. MS также может рассчитать промежуточные параметры и может пересчитать их, чтобы отразить изменения, например, во времени или в положении. Подробности алгоритма "получения и обновления помощи в обнаружении" изложены ниже:
1. Оцените доступность и достоверность используемых данных для помощи в обнаружении и рассчитайте данные для помощи для набора SV-сигналов, которые должны быть измерены следующим образом:
a. Если доступна информация о тактовом сигнале MS, рассчитайте тактовую частоту MS в соответствии с доступными показателями корректировки, насколько возможно:
i. Если доступна информация для корректировки тактовой частоты MS, откорректируйте ожидаемое смещение тактового сигнала  (за время To) посредством прибавления следующего значения,
• (t - To), к смещению тактового сигнала, где измерения SV берутся за время t.
(за время To) посредством прибавления следующего значения,
• (t - To), к смещению тактового сигнала, где измерения SV берутся за время t.
ii. Если доступна информация для корректировки неопределенности смещения тактового сигнала MS, откорректируйте неопределенность смещения тактового сигнала  (за время To)посредством прибавления
(за время To)посредством прибавления  • (t - To).
• (t - To).
iii. Если корректировки согласно этапам i или ii не могут быть выполнены, используйте неоткорректированное значение релевантной величины.
b. Выберите SV из набора SV, сигналы которых должны быть измерены для первого обнаружения сигнала, начиная с SV высоким углом возвышения, если это удобно.
c. Используйте уравнения (4) и (5), чтобы вычислить предсказанную фазу кода и размер окна поиска для, по меньшей мере, первого из набора SV-сигналов, которые должны быть измерены.
d. Используйте уравнения (1) и (2), чтобы вычислить предсказываемую доплеровскую частоту и размер окна поиска доплеровской частоты для, по меньшей мере, первого из набора SV-сигналов, которые должны быть измерены.
e. Если информация о тактовом сигнале MS недоступна или она недостоверна для текущего измерения и MS использует опорный момент времени CDMA для измерений:
i. Используйте уравнения (7) и (8), чтобы вычислить предсказанную фазу кода и размер окна поиска для, по меньшей мере, первого из набора SV-сигналов, которые должны быть измерены.
ii. Используйте уравнения (1) и (2), чтобы вычислить предсказываемую доплеровскую частоту и размер окна поиска доплеровской частоты для, по меньшей мере, первого из набора SV-сигналов, которые должны быть измерены.
2. На основе данных для помощи, рассчитанных так, как описано в этапе 1 данного алгоритма, измерьте, по меньшей мере, один из SV-сигналов, чтобы получить измеренное значение фазы кода.
3. Используйте результаты измерения из одного или более сигналов из набора SV-сигналов, которые должны были быть измерены в соответствии с любыми надлежащими навигационными алгоритмами:
a. Повторно вычислите некоторые или все параметры MS R,  ,
,
,
,  и
;
и
;
b. Необязательно, повторно вычислите другие параметры при необходимости, такие как
,
и  .
.
c. Необязательно, вычислите α и азимут для одного или более измеренных SV-сигналов, оставшихся из набора SV-сигналов, которые должны быть измерены.
4. Определите, все ли из набора SV-сигналов, которые должны быть измерены, были обнаружены или измерены.
Если все были измерены, прекратите измерения обнаружения и перейдите к требуемым последующим этапам, например, вычислению местоположения MS.
Если остаются SV-сигналы, которые должны быть измерены, модифицируйте набор SV-сигналов, которые должны быть измерены, чтобы отражать только те, которые еще не были измерены, и вернитесь к этапу 1, как описано выше.
Примеры надлежащих навигационных алгоритмов могут быть найдены в патенте США 6353412.
Далее приведен пример, иллюстрирующий этап 3 вышеописанного способа, при условии, что оценка смешения тактового сигнала MS известна. Фаза P кода для SV-сигнала была измерена, и может быть определено, что MS содержится в пространстве V между двумя сферами, имеющими один центр в местоположении SV. Радиус сферы задается следующим уравнением:
 ,
,
Местоположение MS может быть обновлено, поскольку оно ограничено пересечению пространства V и наиболее достоверной ранее оцененной областью неопределенности местоположения MS. Если пересечение меньше, чем ранее оцененная область неопределенности местоположения MS, то может быть возможно уменьшить неопределенность смещения тактового сигнала MS (после учета неопределенности измерения P). В качестве примера уменьшения неопределенности смещения тактового сигнала MS рассмотрим случай, в котором SV располагается с углом возвышения α = 90°. В этом случае V приблизительно задается двумя параллельными горизонтальными плоскостями. Следовательно, неопределенность смещения тактового сигнала MS может быть уменьшена до уровня, который эквивалентен неопределенности в местоположении высоты над уровнем моря, учитывая неопределенность измерения.
Следующий пример иллюстрирует вторую реализацию этапа 3 настоящего способа. Эта реализация должна быть использована, когда оценка смещения тактового сигнала MS недоступна и когда известно, что MS извлекает свой опорный момент времени из пилот-сигнала обслуживающей BS. MS размещена в пространстве V между двумя поверхностями двух гиперболоидов, при этом каждый из них имеет одну фокальную точку в SV и другую фокальную точку в обслуживающей BS. Разности расстояний характеристик двух гиперболоидов основаны на измеренной фазе кода, откорректированной на  (умноженной на c), где
(умноженной на c), где  - это ожидаемое смешение тактового сигнала BS, а
- это ожидаемое смешение тактового сигнала BS, а  - ожидаемая разность в задержке по времени между GPS и CDMA-каналами приема в MS. Два гиперболоида разделены на расстояние, отражающее неопределенности в измеренной фазе сигнала и в
и
. Обновленное местоположение MS задается посредством пересечения V и ранее оцененной области неопределенности местоположения MS. Если пересечение меньше, чем ранее оцененная область неопределенности местоположения MS, неопределенность местоположения может быть уменьшена.
- ожидаемая разность в задержке по времени между GPS и CDMA-каналами приема в MS. Два гиперболоида разделены на расстояние, отражающее неопределенности в измеренной фазе сигнала и в
и
. Обновленное местоположение MS задается посредством пересечения V и ранее оцененной области неопределенности местоположения MS. Если пересечение меньше, чем ранее оцененная область неопределенности местоположения MS, неопределенность местоположения может быть уменьшена.
Заметим, что изложенная выше вторая реализация этапа 3 может быть модифицирована для использования со вторичным источником сигнала, отслеживаемым MS (так, чтобы измерение фазы кода для такого источника было доступно в MS), вместо обслуживающей BS. Для этого P, измеренная для SV, может быть пересчитана из опорного момента времени, который MS должна использовать, если этот вторичный источник предоставил опорный момент времени, т.е. измерения могут быть смещены на относительное время поступления сигнала вторичного источника. Используя соответствующую информацию, относящуюся к такому вторичному источнику, вычисление в противном случае продолжается так, как описано выше по отношению к обслуживающей BS.
Расширение достоверности данных для помощи в обнаружении. Вопросы времени
Длительность проверки достоверности данных для помощи в обнаружении может быть задана как продолжительность периода времени, в течение которого данные для помощи могут точно описать расстояние между BS и SV из MS. Длительность проверки достоверности зависит от степени перемещений SV и MS, при условии, что BS могут рассматриваться стационарными. Для стационарной MS длительность проверки достоверности данных для помощи в обнаружении SV варьируется от 30 секунд до одного часа, в зависимости от доступности и точности коэффициентов, которые предоставляются для показателей более высокого порядка в уравнении, описывающем доплеровские сдвиги SV.
Полезно использовать (возможно, значительное) время проверки достоверности данных для помощи, и чтобы уменьшить время, необходимое, чтобы обнаружить сигнал, и чтобы сохранить ресурсы связи посредством уменьшения необходимости в частых обновления данных для помощи. Эффективному использованию данных для помощи тем не менее препятствуют признаки текущих систем, связанные с синхронизацией тактового сигнала MS и местоположением MS.
Во-первых, например, MS часто изменяет опорный момент времени вследствие переадресаций вызовов базовой станцией (или других изменений в обслуживающей BS), которые могут проистекать из затухания сигнала, условий трафика или других причин. Когда происходит изменение пилот-сигнала, используемого в качестве опорного момента времени, полученная фаза кода сигнала (от SV или BS), обнаружение которой ведется, может быть смещена на настолько большое значение, что исходная помощь в фазе кода становится бесполезной. В этом случае MS может обновить значение
, чтобы оно ссылалось на новую обслуживающую BS, чтобы вычислить соответствующие данные для помощи.
Расширение достоверности данных для помощи в обнаружении. Вопросы перемещения
Второе препятствие эффективному использованию данных для помощи возникает из того факта, что MS, которая не является стационарной, может быть перемещена на расстояние, которое достаточно, чтобы сделать недостоверными предыдущие данные для помощи в фазе кода. Если MS переместилась с момента приема данных для помощи в обнаружении и MS может получить оценку своего нового местоположения, то MS может просто использовать оценку нового положения для расчета данных для помощи в обнаружении на основе другой информации для помощи в обнаружении, которая была ранее принята (при условии, что она по-прежнему достоверна). MS может получить новую оценку местоположения любым доступным удобным средством. Например, MS может выполнить измерения улучшенной трилатерации прямого канала связи (AFLT), чтобы извлечь относительно узкую оценку. Оценка местоположения может быть установлена только на основе обслуживающего сектора новой обслуживающей BS. Оценка обслуживающего сектора может быть дополнительно ограничена посредством неполных измерений, например, фазы кода ко второй BS, которая отслеживается мобильной станцией. Это неполное измерение может задавать область неопределенности, ограниченную пересечением обслуживающего сектора, и область неопределенности вокруг гиперболоида, заданного посредством фокусировки на обслуживающей BS и (например) второй BS. В данном примере гиперболоид имеет характеристическое расстояние, определяемое относительной фазой кода второй BS относительно обслуживающей BS. Значение неопределенности, или диапазон на любой стороне номинального гиперболоида, включает в себя сумму неопределенностей тактового сигнала для обоих BS и сумму неопределенностей измерений фазы кода к каждой (умноженную на c). Посредством обновления информации о местоположении MS, как требуется, срок достоверности большинства данных для помощи в обнаружении может быть увеличен на временные ограничения, налагаемые возможностью экстраполировать в будущее, что, как описано выше, ограничено точностью и доступностью коэффициентов более высоких порядков уравнения, описывающего доплеровские сдвиги источника сигнала (SV).
Еще одна методика, которая может быть использована для определения того, переместилась ли MS, - это "сравнение списков BS". BS выбираются для членства в списке согласно критериям, которые конкретны для списка. По мере изменения условий эти конкретные условия идентифицируют другой набор BS, которые будут составлять членство обновленного списка. Следовательно, "аналогичный список", как этот термин используется в данном документе, относится к списку, поступающему посредством согласованных условий и процедур, и членство такого списка, как ожидается, изменяется во времени, чтобы отражать изменяющиеся условия.
Список BS может быть подходящим для определения перемещения MS, если условия членства в списке во многом отражают местоположение MS. Примеры подходящих списков для этой цели включают в себя "список соседних элементов" "активный набор" или обслуживающую BS. Другие списки, могут, конечно, быть подходящими, в частности, в реализациях не по стандарту CDMA, которые могут вообще не использовать эти конкретные списки. "Обслуживающая" BS - это BS, поддерживающая основной обмен данными с обслуживаемой MS. "Список соседних элементов" предоставляется обслуживающей BS обслуживаемой MS и идентифицирует BS, которые размещаются относительно близко, но, в общем, не включает в себя BS, которые находятся в "активном наборе" MS. "Активный набор" - это список или группа (обычно 1-6) BS, имеющих сильные пилот-сигналы, которые активно отслеживаются MS.
Методика сравнения списков BS может быть использована, чтобы определить, следует ли заново рассчитывать местоположение MS и корректировать данные для помощи в обнаружении на новое местоположение. Альтернативно, эта методика может быть использована просто в качестве индикатора того, являются или нет предыдущие данные для помощи в обнаружении (или другие данные) по-прежнему достоверными, на основе текущего местоположения MS. Для некоторых целей эта методика не требует от MS получать какую-либо информацию, которая не сделана в обычном порядке доступной MS, в соответствии с используемыми стандартами беспроводной связи, и таким образом, эта методика может быть реализована безотносительно изменений в требованиях, изложенных в этих стандартах. Более того, определение того, перемещалась ли MS, может быть полезно не только при принятии решения о том, остается ли информация об обнаружении достоверной, но также и в отношении других чувствительных к местоположению элементов. Например, определение значительного перемещения MS может быть использовано в определенных обстоятельствах, чтобы инициировать новый сеанс определения местоположения. Определение местоположения также может инициировать обновление чувствительных к местоположению данных, таких как календарь BS, календарь повторителей и т.д.
Возможное перемещение MS может быть предположено в любое время, когда есть изменение в любом элементе между прошлой и текущей версиями (a) списка соседних элементов BS для MS, (b) активного набора BS для MS или (c) обслуживающей BS для MS. Таким образом, при отсутствии каких-либо изменений можно предположить, что перемещения не происходило. Этот результат позволяет, например, избежать необходимости обновлять оценки местоположения и может указывать, что ранее полученная информация об обнаружении (или другая чувствительная к местоположению MS информация) остается достоверной. Если какая-либо часть этих сравнений изменяется, то в самом простом случае данные, чья достоверность рассматривается, могут быть рассмотрены как недостоверные.
Тем не менее более подробный анализ может потребоваться, чтобы определить, без излишних заключений о недостоверности, произошло ли фактически достаточное перемещение MS, которое может подвергнуть риску точность и, следовательно, достоверность используемой чувствительной к местоположению информации.
Более подробный анализ в отношении того, переместилась ли MS значительно, может быть инициирован, например, посредством любого незначительного изменения в списке релевантных BS. Анализ может быть простым или может быть сложным с соответствующей сложностью в зависимости от целей, для которых распознается перемещение. Например, если цель распознавания перемещения - просто определить, следует ли обновлять список локальных повторителей или SV, то анализ может быть простым тестированием того, изменилась ли обслуживающая BS и при этом изменился активный набор. Тем не менее для целей определения местоположения экстренной службой E911 может быть желателен очень чувствительный анализ. Чувствительность и сложность анализа может быть выбрана в соответствии с обычными техническими факторами, например, балансировка усилий по обработке в отношении скорости на обнаружение.
Рассмотрим множество BS, размещенных около области, показанной на фиг.2. Для целей данного обсуждения можно предположить, что расстояние между BS1 и BS10 составляет приблизительно пять миль. Предположим дополнительно, что конкретная MS первоначально имела активный набор BS, составленный из BS2, BS3 и BS4, и что обслуживающей BS является BS3. BS4 и BS6 располагаются относительно близко друг к другу, и MS может быть в таком положении, что любая BS в равной степени подходит для включения в активный набор MS. Следовательно, если BS4 удаляется из активного набора, тогда как BS6 добавляется, близость исключенных и добавленных BS может означать, что заключение о перемещении MS не может быть надежно сделано только из этого изменения. Поэтому незначительные изменения, такие как исключение BS4 и добавление BS6 в активный набор может быть рассмотрено как невозможность указать значительное изменение местоположения MS. Тем не менее, даже такие незначительные изменения в списке могут быть использованы, чтобы активировать рассмотрение одного или более дополнительных индикаторов для подтверждения слабого свидетельства о перемещении MS, которое представляет незначительное изменение. Это подтверждение может быть получено, например, для рассмотрения других списков или выбора диапазона параметров сигнала.
Незначительное изменение замены BS6 на BS4 в активном наборе MS может быть интерпретировано (самой MS) как не указывающее на значительное перемещение. При условии того же первоначального активного набора (BS2, BS3 и BS4), тем не менее, изменение в BS3, BS5 и BS7 предполагает, что произошло значительное перемещение MS, даже если обслуживающая BS остается неизменной (BS3). Следовательно, после такого изменения в активном наборе информация о местоположении и данные для обнаружения могут быть рассмотрены как недостоверные, если она указывает на неопределенность местоположения, которая уже, чем сота обслуживающей BS (Разумеется, если обслуживающая BS остается неизменной, то слабо обработанная информация, указывающая местоположение в рамках границ обслуживающей соты, может оставаться достоверной). Если информация, как считается, является недостоверной, то необходимость в помощи в обнаружении в MS должен подтвердить запрос на новую помощь в обнаружении от обслуживающей BS.
Списки соседних элементов могут быть использованы способом, аналогичным использованию активных наборов, изложенному выше. Например, исходный список соседних элементов, который включает в себя BS1, BS2 и BS5 (с BS3, BS4 и BS6 в активном наборе) и который изменяется, чтобы исключить BS5 и добавить BS7, может не указывать на значительное перемещение MS, в особенности, если BS6 остается обслуживающей BS. Тем не менее, если вместо этого список соседних элементов изменяется, чтобы исключить BS1 и BS2, одновременно добавив BS7 и BS8 (таким образом, включая в себя только BS5, BS7 и BS8), тогда как активный набор продолжает включать в себя BS3, BS4 и BS6, то вывод о перемещении MS может быть выведен, даже если BS6 остается обслуживающей BS.
Решение в отношении того, должны ли конкретные изменения (в сочетании любого или всего из обслуживающей BS, активного набора и списка соседних элементов) рассматриваться, чтобы подразумевать значительное перемещение, может быть оценено количественно. Может быть использована любая подходящая методика и фактически различные методики могут быть использованы для различных целей (к примеру, в отношении различных данных) или в отношении различных наборов BS (к примеру, все видимые BS, BS активного набора или обслуживающие BS).
Одна методика, которая может быть использована, чтобы количественно оценить решение в отношении того, произошло ли "значительное" или "подвергающее риску достоверность данных" перемещение MS, заключается в том, чтобы определить вектор "кажущегося изменения" между первой точкой, представляющей список BS в более ранний момент времени, и второй точкой, которая представляет тот же список в более поздний момент времени. Точка может быть рассмотрена, чтобы представлять конкретный список BS, если она расположена таким образом, что сумма квадратов ее расстояния до каждой из BS в списке минимизирована. Вектор от первой точки ко второй точке может быть назван вектором "кажущегося изменения". Вектор "кажущегося изменения" может быть рассчитан для любого релевантного набора BS (к примеру, списка соседних элементов, активного набора, объединенного списка и т.д.) Каждый вектор "кажущегося изменения" может рассматриваться независимо или альтернативно векторы, сгенерированные из различных списков, могут быть векторно объединены (разумеется, другие сочетания также возможны). Результирующий вектор может быть сравнен (отдельно или после объединения) с надлежащим образом выбранным пороговым значением. Результат, превышающий выбранный порог, может быть интерпретирован как указывающий на значительное, подвергающее риску данные перемещение MS, тогда как разности ниже этого порога могут быть интерпретированы как незначительные.
Один пример вычисления "кажущегося изменения" проиллюстрирован снова со ссылкой на фиг.2. В момент времени T0 первый набор BS (активный набор) состоит из BS1, BS2 и BS3. В более поздний момент времени t активный набор состоит из BS3, BS4 и BS6. Посредством минимизации Sum1 = (d1 202)2 + (d2 204)2 + (d3 206)2 находится первая точка 208. Вторая точка 210 находится посредством минимизации Sum2 = (d4 202)2 + (d5 204)2 + (d6 206)2. Вектор 218 "кажущегося изменения" существует между первой точкой 208 и второй точкой 210. Заметим, что если наборы BS, такие как активный набор и список соседних элементов являются взаимоисключающими, то две конкретные BS меняются местами в двух различных наборах, вектор "кажущегося изменения" одного набора способствует компенсации в некоторой степени вектора "кажущегося изменения" другого набора. Взвешивание может быть добавлено в качестве уточнения. Надлежащий порог зависит от того, объединены ли результаты группировки BS. Начальный порог может быть задан как 1/6 от суммы предыдущей и текущей неопределенности местоположения. Альтернативный порог может быть рассчитан как 45% среднего расстояния между BS. Таким образом, может быть разработан способ оценки перемещения MS на основе сравнения определенного сочетания текущих и предыдущих обслуживающих BS, BS списка соседних элементов и BS активного набора. Способ может быть настолько простой или сложный, насколько требуется, в зависимости от технических и других факторов. Эти факторы могут включать в себя доступность информации о местоположении BS, способы, которыми выбираются списки соседних элементов и активные наборы, и чувствительность к местоположению элемента, для которого осуществляется эта оценка.
Для целей оценки того, перемещалась ли выбранная MS, могут быть проанализированы изменения в группах BS, как изложено ниже. Тем не менее группы могут значительно различаться и не должны быть ограничены BS, но могут включать в себя любые полезные источники сигналов. Группа, вероятно, является релевантной, если условия для включения в группу (или список) преимущественно основаны на близости к MS. Значение и значимость изменений в членстве различных групп зависит от уникальных характеристик этой группы, и результаты от различных групп, возможно, должны взвешиваться перед объединением с результатами других групп. Имя любой группы не важно, и конкретные имена (активный набор, список соседних элементов и обслуживающая BS) используются в данном документе только потому, что они предоставляют удобную ссылку на группы, известные в системах CDMA, которые релевантны для определения местоположения MS. В других системах другие группы могут быть релевантны, даже если условия для включения значительно отличаются от условий для этих конкретных групп BS. Отличия между релевантностью и значимостью членства в различных группах должны быть рассмотрены в каждом случае отдельно, и взвешивание может потребоваться применить при объединении признаков перемещения MS, извлеченных из изменений в группах различной важности или чувствительности.
Поток вызовов сообщений для помощи в обнаружении в телекоммуникационных системах CDMA
Фиг.3 иллюстрирует поток сообщений, когда MS инициирует сеанс определения местоположения или иным образом идентифицирует необходимость в помощи в обнаружении. Эта необходимость может возникать, например, когда пользователь запрашивает информацию о местоположении у MS. На фиг.3 MS идентифицирует необходимость в информации для помощи в обнаружении за время 302. В течение последующего периода времени 304 MS начинает несколько действия, которые не должны быть последовательными. Сообщение 306 готовится и передается обслуживающей BS, где должно быть передано модулю определения местоположения (PDE) в рамках системы. Сообщение 306 может предоставлять информацию обслуживающей BS о возможностях MS интерпретировать расширенную информацию о местоположении и рассчитать параметры информации о местоположении локально, а также информацию о параметрах для помощи в обнаружении, которые необходимы. Сообщение 306 также может предоставлять эту информацию о местоположении MS, уже доступную MS (тем не менее, эта информация может быть необработанной), такую как, например, идентификация обслуживающей BS, список BS активного набора и соответствующие измерения пилот-сигналов, список соседних элементов, LAT/LONG из служебного сообщения CDMA и т.д. Любая или вся информация, которая поможет PDE, может быть передана, в том числе информация об обслуживающей BS, которая может не поддерживать обмен данными с PDE. Сообщение, запрашивающее помощь в обнаружении, также передается PDE посредством BS, например, сообщение, озаглавленное "Предоставить общую помощь в обнаружении".
Помимо подготовки и передачи сообщения 306 запроса на помощь в обнаружении в течение периода 304 времени MS может также начать обнаружение информации о сигналах BS, которая может быть полезной. Это может включать в себя обнаружение сигналов BS, которые MS не отслеживала, и измерение сигналов BS, которое может предоставить полезную информацию для выбора диапазона. В течение этого периода времени MS также может постараться улучшить информацию о местоположении, которую имеет, например, посредством улучшенной трилатерации прямого канала связи (AFLT), используя измерения BS, которые она сделала помимо календарной информации, доступной об этих BS. Заметим, что может быть полезно определить, поступили ли какие-либо пилот-сигналы BS посредством повторителя, так чтобы этот сигнал мог быть надлежащим образом обработан и не рассматривался как переданный непосредственно от обслуживающей BS. Если эти задачи полностью выполняются до того, как информация для помощи в обнаружении приходит от PDE посредством BS, то MS может попытаться обнаружить любые сигналы, которые ей необходимы, до приема этой информации для помощи в обнаружении.
После того, как PDE передает сигнал 308 с информацией для помощи в обнаружении MS посредством BS, в течение периода времени 310 MS вычисляет параметры обнаружения в соответствии с информацией для помощи в обнаружении, предоставленной от PDE, а также в соответствии с измерениями фраз кода локальных BS. Различные методики этих вычислений изложены выше.
В течение времени 312 после того, как MS вычислила информацию для помощи в обнаружении для, по меньшей мере, первого сигнала, который должен быть обнаружен, MS использует результирующую оцененную фазу кода и окно и характеристики сигнала, чтобы фактически обнаружить сигнал. Может быть выгодно начать с SV, который практически вертикально над, чтобы иметь возможность уменьшить неопределенность смещения тактового сигнала MS и далее уменьшить вычисленное окно обнаружения для последующих сигналов в соответствии с последовательным "уплотнением" неопределенностей фазы кода на основе изменения только части списка требуемых сигналов. В течение этого периода времени MS обычно завершает требуемое обнаружение сигналов выбора диапазона. Если она находится в пределах сферы отслеживания MS, MS также может вычислить ее местоположение или иным образом интерпретировать необработанную информацию выбора диапазона, которую она измеряет. После выполнения этих задач MS передает сообщение 314 обратно соответствующему объекту или объектам. Сообщение 314 обычно содержит результаты измерений сигнала выбора диапазона и местоположение, если оно определено. Сообщением может быть стандартное сообщение, озаглавленное "Предоставить сообщение об общих измерениях".
Фиг.4 иллюстрирует поток сообщений, когда другой объект инициирует сеанс определения местоположения или иным образом указывает MS искать сигналы, для которых требуется помощь в обнаружении. В этом случае MS не инициирует действия для дополнительного такого определения местоположения до тех пор, пока она не будет извещена о необходимости сообщением 402. Сообщение 402 может предоставлять общую помощь в обнаружении, в которой BS или PDE использует информацию, которую имеет, такую как местоположение обслуживающей соты для MS, чтобы определить первоначальные данные для помощи в обнаружении и первоначальную информацию о местоположении. Сообщение обычно включает в себя запрос на общее измерение и может содержать дополнительную информацию, например, список сигналов, которые должны быть использованы для определения местоположения, и т.п. Таким образом, MS определяет необходимость, чтобы обнаруживать сигналы, за время 404 после приема сообщения 402.
После приема сообщения 402 MS может продолжать действовать аналогично, как описано выше по отношению к фиг.3. Обнаружение релевантных BS, например, из списка соседних элементов, может быть осуществлено в течение периода 406 времени, хотя этот период времени может быть укорочен по сравнению с соответствующим периодом 304 времени фиг.3 благодаря дополнительной информации, которая предоставляется MS вместе с первоначальным запросом в сообщении 402. MS может продолжать вычислять параметры обнаружения в течение периода 408 времени после измерения полезных BS. Эти действия могут фактически перекрываться между указанными периодами. В течение периода 410 времени MS может использовать помощь в обнаружении, полученную из вычисления в периоде 408 или из сообщения 402 запроса и дополнительно из измерений, сделанных в MS, чтобы фактически обнаружить и измерить интересующие сигналы. После того, как обнаружение завершено, MS может просто возвратить данные измерений запрашивающей объект посредством BS в сообщении 412. Если требуется, MS может рассчитать фактические значения выбора диапазона и местоположения, которые должны быть включены в сообщение 412.
Дополнительные сообщения в телекоммуникационных системах
В соответствии с одним вариантом осуществления раскрытых способа и устройства MS принимает признак "Отправить все измерения" (SAM) в рамках одного из сообщений, переданных MS от BS. Признак SAM указывает, что MS должна предоставить измерения для всех сигналов связи, для которых MS измерила относительное время поступления (или альтернативно фактическое время поступления в случаях, в которых MS допускает измерение времени поступления в фактическом времени). Следует заметить, что в традиционных ситуациях MS выбирает измерения конкретных сигналов, принятых MS, из всех вероятных измерений, которые MS может иметь возможность выполнять.
Причина ограничения числа измерений, отправляемых в традиционной системе, заключает вы том, что предполагается, что только самый ранний поступающий сигнал от каждой BS предоставляет значение устройству, которому назначена задача расчета местоположения MS. Это обусловлено тем, что более поздние поступающие сигналы, передаваемые в MS из одной и той же BS как более ранний поступающий сигнал, принятый MS, считаются отражениями (также часто называются "многолучевыми сигналами"). Эти многолучевые сигналы приняли косвенный путь от BS к MS. Как можно понять из того, что наиболее быстрый маршрут между BS и MS - это самый прямой маршрут, более ранний поступающий сигнал прошел по самому прямому маршруту. Расстояние вдоль самого прямого маршрута является наиболее точной индикацией расстояния между BS и MS. Следовательно, измерения других менее прямых маршрутов между BS и MS, как считается, имеют небольшую ценность. Помимо этого, в некоторых случаях мощность принимаемых сигналов должна быть выше требуемого порога мощности или MS не будет сообщать об измерении этого сигнала, даже если этот сигнал является самым ранним поступающим сигналом из сигналов, принятых из одного и того же источника.
Тем не менее, сигналы, которые либо ниже порога мощности, либо которые прошли по непрямому маршруту, могут предоставлять дополнительную информацию устройству, которое в итоге рассчитает местоположение MS. Следовательно, раскрытые здесь способ и устройство дают возможность BS передавать признак SAM и дают возможность MS отвечать на сообщение, которое включает в себя признак SAM, посредством отправки всех измерений, которые MS может выполнять. Альтернативно, после приема признака SAM MS отправляет поднабор всех возможных измерений, при этом поднабор больше, чем было бы отправлено в том случае, если бы признак SAM не был принят MS.
Заключение
Предшествующее описание иллюстрирует примерные реализации и новейшие признаки способа и системы получения информации для помощи в обнаружении для использования в беспроводной связи. Существует много аспектов данного способа и системы, поскольку она может влечь за собой взаимодействие между множеством компонентов системы связи. Различные аспекты способа и системы могут влечь за собой, например, получение исходных данных для помощи в обнаружении, продление срока полезности этих данных, получение определенных данных для обнаружения посредством расчетов с помощью ранее полученных данных для помощи в обнаружении или посредством обновления предыдущей информации об обнаружении, чтобы отражать изменения в условиях, и оценку достоверности ранее полученных данных для помощи в обнаружении. Хотя некоторые предложения предоставлены для альтернативных вариантов использования и реализаций способа и устройства, разумеется, неразумно полностью перечислять или описывать эти альтернативы. Следовательно, область применения настоящего изобретения должна быть определена только со ссылкой на прилагаемую формулу изобретения и не должна в иных отношениях быть ограниченной признаками, проиллюстрированными в данном документе за исключением пределов, до каких такое ограничение приведено в прилагаемой формуле изобретения.
Хотя вышеприведенное описание указало новейшие признаки раскрытого способа и устройства при применении к различным вариантам осуществления, специалисты в данной области техники понимают, что различные исключения, замены и изменения в форме и деталях проиллюстрированных способов и систем могут быть выполнены без отступления от области применения изобретения. Например, специалисты в данной области техники могут адаптировать описанные в данном документе подробности к системам связи, имеющим широкий диапазон методик модуляции, архитектур передающего и приемного устройства и, в общем, любое число различных форматов. В частности, любое системное передающее устройство может функционировать в качестве базовой станции для целей данного объекта и не обязательно использует технологию CDMA и даже может не быть сотовой телекоммуникационной базовой станцией. Любое передающее устройство может быть рассмотрено аналогично, как рассматриваются SV в данном документе, при этом информация для помощи в обнаружении выводится, получается и используется, чтобы оказывать помощь в обнаружении сигнала от такого передающего устройства.
Каждое практическое и новое сочетание элементов, описанных выше в данном документе, и каждое практическое сочетание эквивалентов этих элементов рассматривается как вариант осуществления изобретения. Частично из-за того, что гораздо больше сочетаний элементов рассматриваются как варианты осуществления изобретения, чем разумно может быть неявно перечислено в данном документе, область применения изобретения надлежащим образом задается прилагаемой формулой изобретения, а не предшествующим описанием. Более того, любое осуществимое сочетание вышеописанных признаков следует рассматривать как явно или неявно раскрытое в данном документе. Все варианты, подпадающие под смысл и диапазон эквивалентности различных пунктов формулы изобретения, включаются в область применения соответствующего пункта. С этой целью каждый описанный элемент в каждом пункте формулы изобретения должен истолковываться настолько широко, насколько возможно, и более того, должен пониматься, чтобы заключать в себе любой эквивалент этого элемента в максимально возможных пределах без заключения предшествующего уровня техники.
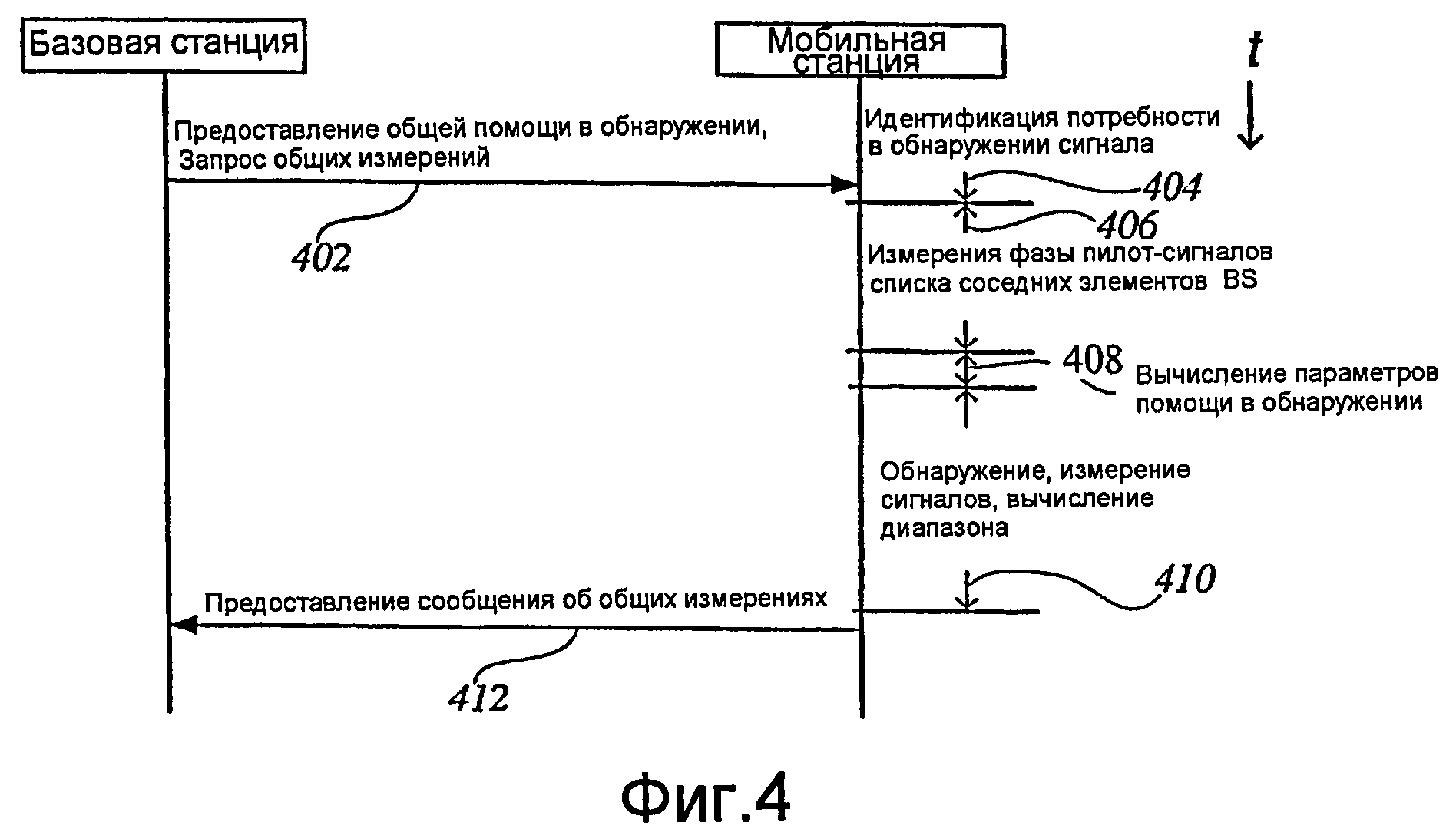
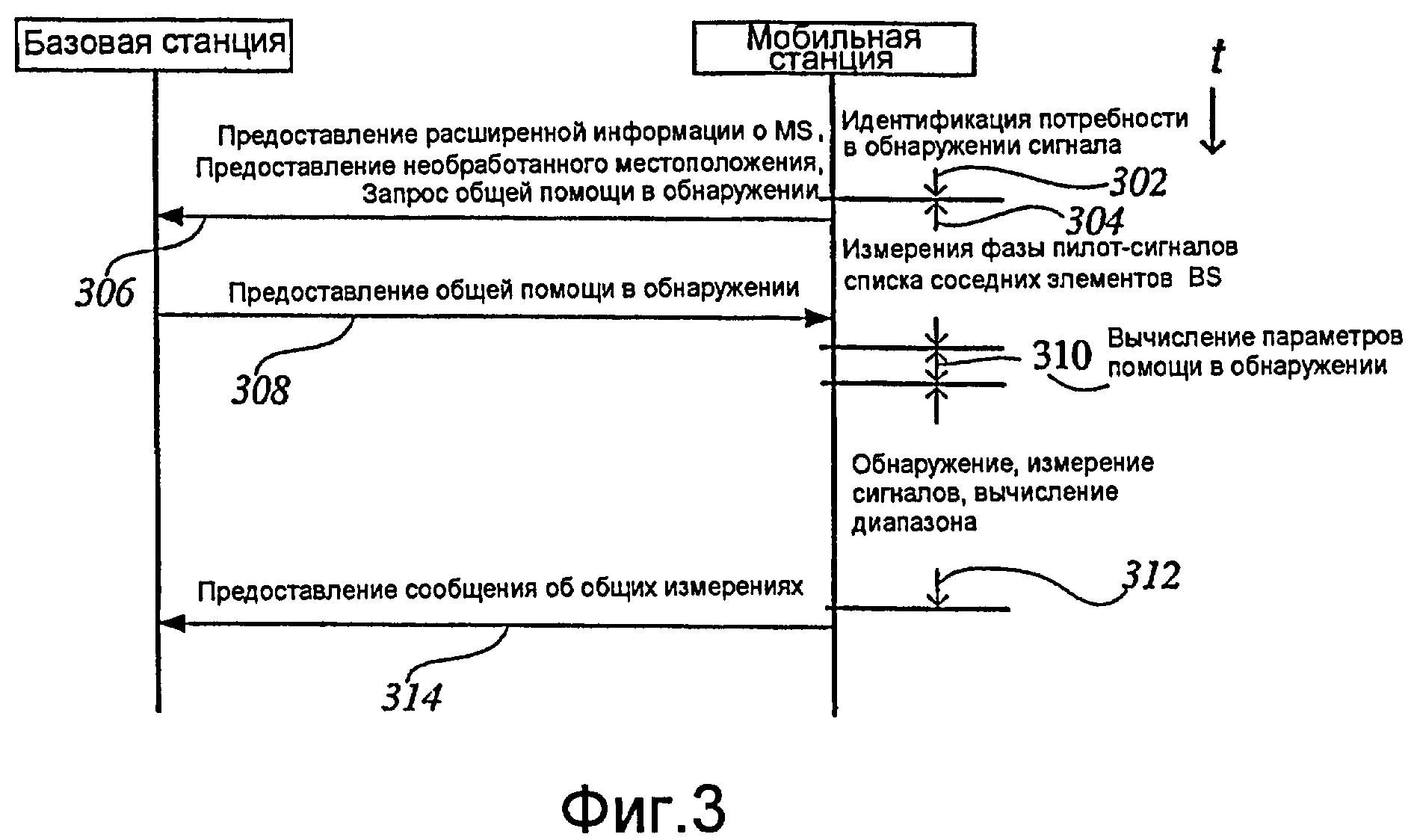
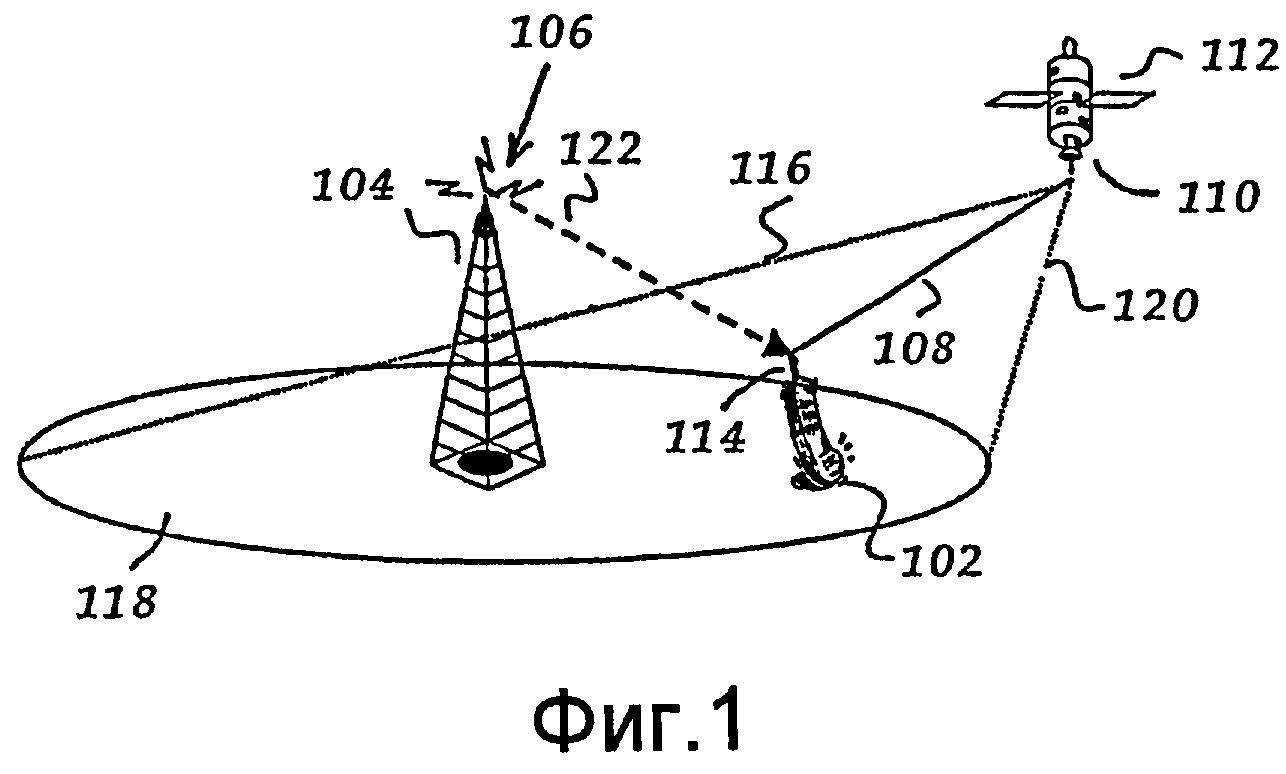
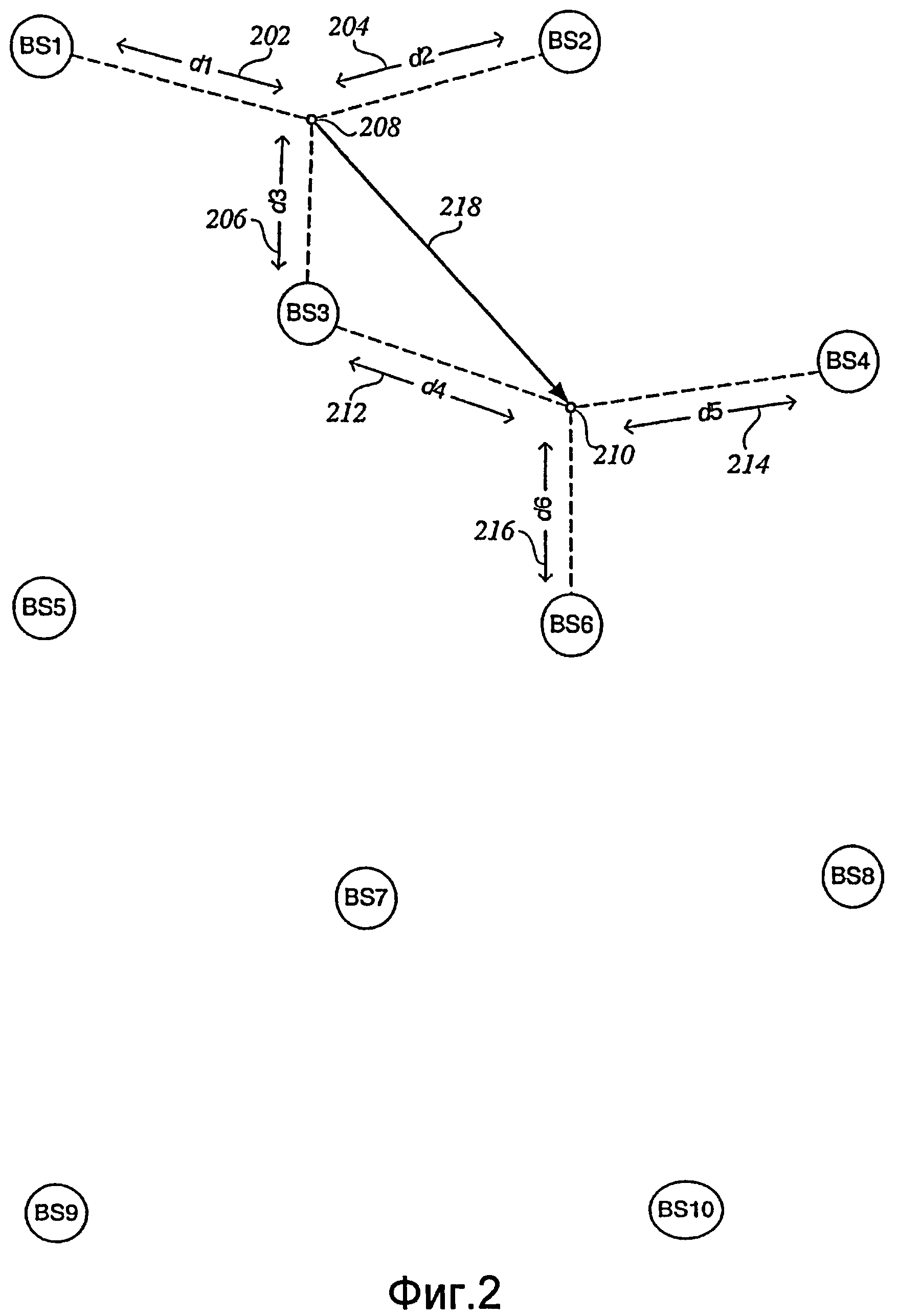
Обнаружение многолучевого распространения для принимаемого sps-сигнала
Способ для указания местоположения и направления элемента графического пользовательского интерфейса
Виртуальное планирование в неоднородных сетях
Кодирование и мультиплексирование управляющей информации в системе беспроводной связи
Система беспроводной связи с конфигурируемой длиной циклического префикса
Способ и устройство для осуществления информационного запроса сеанса для определения местоположения плоскости пользователя
Универсальная корректировка блочности изображения
Основанная на местоположении и времени фильтрация информации широковещания
Способ и устройство для поддержки экстренных вызовов (ecall)
Виртуальная sim-карта для мобильных телефонов
Обнаружение многолучевого распространения для принимаемого sps-сигнала
Способ для указания местоположения и направления элемента графического пользовательского интерфейса
Виртуальное планирование в неоднородных сетях
Кодирование и мультиплексирование управляющей информации в системе беспроводной связи
Система беспроводной связи с конфигурируемой длиной циклического префикса
Способ и устройство для осуществления информационного запроса сеанса для определения местоположения плоскости пользователя
Универсальная корректировка блочности изображения
Основанная на местоположении и времени фильтрация информации широковещания
Способ и устройство для поддержки экстренных вызовов (ecall)
Виртуальная sim-карта для мобильных телефонов

