Результат интеллектуальной деятельности: СТЕНД ДЛЯ ИСПЫТАНИЯ ДИНАМИЧЕСКОЙ НАГРУЗКИ
Вид РИД
Изобретение
Настоящее изобретение относится к стенду для испытания динамической нагрузки, предназначенному для приложения к вращающемуся валу испытываемого устройства, такому как привод и т.п., радиальных нагрузок и переменных вращающих моментов для воспроизведения с максимально возможной достоверностью механических смещений или ограничений, прилагаемых приводом в фактических условиях использования.
В предпочтительном, хотя не исключительном варианте использования выходной вал вращательного стенда несет как единое целое при вращении аэродинамическую поверхность летательного аппарата, такую как рулевая поверхность ракеты или другого устройства, циркулирующего с высокой скоростью в текучей среде, и она в таком случае подвергается воздействию развивающихся и высоких напряжений (радиальных нагрузок) и шарнирных моментов (вращающих моментов), генерируемых аэродинамическими силами, прилагаемыми к рулевой поверхности в соответствии с углом отклонения последней.
Таким образом, назначением стенда для испытания динамических нагрузок, соответствующего изобретению, является воспроизведение как радиальных нагрузок, так и переменных вращающих моментов в зависимости от угла вращения, принятого выходным валом вращательного стенда, представляющих отклонение, осуществляемое рулевой поверхностью. Величина этих напряжений и моментов может быть модулирована как функция времени для представления различных точек полета ракеты (медленные и/или быстрые изменения скорости, траектории и изменения высоты) и максимально возможного приближения к соответствующим фактическим условиям, то есть аэродинамическим рабочим нагрузкам, которым подвергается привод, для последующей оптимизации его конструкции.
Стенды для испытания динамических нагрузок для таких приводов уже известны и основаны на управляемых средствах воспроизведения только вращающего момента на основе торсионного стержня или моментного датчика.
В первом случае торсионный стержень средства воспроизведения стенда соединен, с одной стороны, непосредственно с валом вращательного стенда для испытаний и, с другой стороны, ограничен так, что когда привод имеет угловой допуск, он генерирует вращающий момент, пропорциональный углу вращения при отклонении. Такие торсионные стержни, хотя они имеют по существу базовую конструкцию, прилагают возвратные моменты, которые не позволяют генерировать дестабилизирующие и/или развивающиеся нагрузки, как функцию отклонения рулевой поверхности. Кроме того, они слишком ограничены и не позволяют достоверно подтверждать рабочие характеристики приводов в фактических условиях полета, таким образом, что из-за отсутствия ясных и точных данных средства воспроизведения с торсионным стержнем очень сложны для сохранения запасов.
Во втором случае генератор вращающего момента средств воспроизведения прямо соединен с приводом и образован, в результате заданных динамических характеристик, гидравлическим моментным двигателем. С другой стороны, если, таким образом, могут испытываться высокие вращающие моменты, относительные перемещения, происходящие между моментным двигателем и приводом, генерируют проблемы в результате их инерции и их жесткого соединения, то есть, когда вал одного из них вращается, другой имеет тенденцию противодействовать, таким образом, что могут возникать удары, вызывающие повреждение оборудования. Эта возможность может быть усилена существенно мощными гидравлическими двигателями.
В дополнение к приложению вращающего момента к испытываемому вращающемуся валу (другой специальный стенд требуется для радиальных нагрузок), эти стенды для испытания динамических нагрузок не часто соответствуют всем ожидаемым результатам и требованиям, таким как:
- наличие меньшей очевидной инерции и нулевого люфта соединения, чтобы не нарушать испытываемый привод; в идеальном случае, действие, с динамической точки зрения, как простого вращающего момента;
- наличие доступной полосы верхних частот контура синхронизации момента, по меньшей мере, вдвое большей, чем у испытываемого привода, для воспроизведения заданного профиля вращающего момента без какой-либо значительной задержки;
- наличие доступной значительно большей насыщенности по скорости и ускорению, чем у привода;
- устойчивость к функциональным рассогласованиям между приводом и стендом для легкости выполнения, включая некоторую гибкость связи, часто несовместимой с полосой верхних частот контура момента;
- обеспечение эффективного управления прилагаемыми вращающими моментами для исключения любой перегрузки, превышения допустимой скорости и случайного упора, которые могли бы показать повреждение, даже в случае, когда привод стал бы дефектным (отключение питания, авария и т.д.).
Из патента США №7080565 известен стенд для испытания динамической нагрузки, позволяющий прилагать к вращающемуся валу испытываемого привода радиальные напряжения и динамические моменты. Однако управляемые средства для их воспроизведения также содержат с этой целью два отдельных устройства, которые независимы друг от друга и имеют специальные узлы. В частности, необходимо механически отключить приложение радиальных напряжений и вращающих моментов посредством сложных систем карданного шарнира, ползуна, шарнирного соединения и т.д. Кроме того, необходимо применять шифратор углового положения для измерения вращения выходного вала привода. И многочисленные присутствующие узлы, и оборудование, кроме того, ограничивают возбуждение стенда при высоких частотах, способных генерировать вредные интерференционные резонансы, и также приводят к сложности выполнения устройства.
Из патента EP 0239264 известно испытательное устройство для приложения только вращающего момента к коллинеарным входному и выходному валам зубчатой передачи трансмиссионного типа для авиационного двигателя. С этой целью оно содержит более специализированное устройство для приложения вращающего момента к двум параллельным и симметричным модулям относительно валов и содержит множество зубчатых передач, ведомых вращательными приводами для достижения большой мощности двигателя.
Настоящее изобретение имеет задачей решение вышеупомянутых проблем и разработку стенда для испытания динамических нагрузок, в котором управляемые средства воспроизведения позволяют прилагать безопасно, надежно и без рисков радиальные нагрузки и переменные вращающие моменты, являющиеся, по меньшей мере, сопоставимыми с теми, которые испытывает испытываемый механизм в фактических условиях использования, чтобы оптимизировать конструкцию и наладку механизмов, таких как вращательные приводы.
Для решения задачи предложен стенд для испытания динамической нагрузки, предназначенный для приложения к вращающемуся валу испытываемого механизма, такого как привод и т.п., радиальных нагрузок и переменных вращающих моментов, создаваемых управляемыми средствами воспроизведения, включающими два идентичных воспроизводящих модуля, расположенных параллельно и симметрично относительно указанного вращающегося испытываемого вала, отличается, в соответствии с изобретением, тем, что каждый модуль включает:
- моментный электродвигатель с ведущим валом, параллельным указанному испытываемому валу, причем указанные моментные электродвигатели указанных двух модулей вращаются в одном направлении;
- торсионный стержень, являющийся неотъемлемой частью соосно одним из его концов с указанным ведущим валом моментного электродвигателя; и
- соединение из шатуна и кривошипа для соединения другого конца указанного торсионного стержня с указанным испытываемым валом в плоскости, перпендикулярной последнему и указанным ведущим валам, таким образом, что в указанной перпендикулярной плоскости указанные шатуны этих двух модулей параллельны и симметрично смещены на 180° друг от друга относительно испытываемого вала и их соответствующих ведущих валов указанными кривошипами.
Таким образом, модульный вариант выполнения средств воспроизведения, как двух идентичных и симметричных модулей относительно вала привода с кинематической конструкцией при помощи моментного двигателя, торсионного стержня и соединения из шатуна, и кривошипа позволяет одновременно прилагать радиальные нагрузки и переменные вращающие моменты к последнему, в противоположность вариантам выполнения известного уровня техники, требующим двух различных стендов или двух независимых отдельных устройств на одном стенде. В такой конструкции из нее механически следует более простое и более надежное получение стенда и большей рабочей динамики без проблем, происходящих от частот возбуждения.
Предпочтительно, чтобы указанный ведущий вал каждого моментного электродвигателя был полым и имел сквозной осевой проход, внутри которого указанный торсионный стержень соединен одним из его концов, составляющим одно целое с указанным полым валом, и другим концом, выходящим из указанного полого вала и соединенным с указанным соответствующим соединением из кривошипа и шатуна. Посредством этого соосного расположения торсионного стержня в ведущем валу два модуля обладают существенной компактностью таким образом, что масса стенда значительно снижается в противоположность предшествующему вышеупомянутому варианту выполнения, где торсионный стержень является продолжением ведущего вала двигателя.
В предпочтительном варианте осуществления изобретения указанные шатуны соединены на одной стороне с указанным испытываемым вращающимся валом двойным общим кривошипом, установленным в его центре на указанном вращающемся валу и несущим на его диаметрально противоположных концах указанные шатуны соответственно, и на другой стороне с указанными соответствующими торсионными стержнями двумя идентичными простыми кривошипами, расположенными со смещением на 180° друг от друга на указанных торсионных стержнях.
Таким образом, эти два шатуна, расположенные симметрично и перпендикулярно относительно вращающегося вала испытываемого механизма (привода), передают (один толкает, другой тянет) и прилагают к последнему желаемые радиальные нагрузки и переменные вращающие моменты, соответствующие вышеупомянутым радиальным напряжениям и шарнирным моментам, которым подвергается вал привода рулевой поверхности, к которой прилагаются значительные аэродинамические силы.
Благодаря двум симметрическим модулям шатуны воздействуют, как противоположные рычаги деформирующегося параллелограмма, на вал привода в плоскости, перпендикулярной последнему, воспроизводя простым и достоверным образом напряжения и вращающие моменты, прилагаемые к указанному валу в фактических условиях использования.
Предпочтительно, чтобы указанные шатуны были установлены на соответствующих кривошипах указанных соединений посредством суставчатой муфты с зазором в коническом отверстии, например коленчатых соединений сферического типа. Таким образом, в такой конфигурации не требуется обеспечение точного позиционирования между испытываемым приводом и двумя модулями благодаря коленчатым сочленениям, сообщающим естественное изостатическое выравнивание стенду в целом и компенсацию различных функциональных люфтов и зазоров.
В конкретном варианте осуществления изобретения расстояние между осями указанного двойного кривошипа, отделяющее испытываемый вращающийся вал от каждого шатуна, идентично расстоянию между осями каждого простого кривошипа, отделяющему указанный торсионный стержень от указанного соответствующего шатуна. Таким образом, указанные шатуны расположены ортогонально к испытываемому вращающемуся валу привода и к ведущим валам моментных электродвигателей.
С точки зрения рабочих характеристик, надежности, низкой инерции, большого объема и массового момента предпочтительно, чтобы указанные моментные электродвигатели модулей были электрическими и, более определенно, бесщеточного типа. Кроме того, сложные гидравлические системы и дорогие установки (компрессоры, аккумуляторы и т.д.), необходимые для работы гидравлических моментных двигателей, не нужны.
Кроме того, указанные торсионные стержни откалиброваны по жесткости при кручении, при этом последние действуют, как калиброванные измерители крутящего момента (угловое смещение от одного конца до другого стержня соответствует данному переданному крутящему моменту).
В соответствии с другой характеристикой, каждый модуль также содержит датчик углового положения указанного ведущего вала моментного электродвигателя и датчик углового положения указанного соответствующего торсионного стержня, и указанные управляемые средства содержат электронное следящее устройство для углового положения, выдаваемого каждым датчиком указанных моментных электродвигателей, как функцию углового положения вращающегося вала указанного испытываемого механизма, и электронный блок питания, соединенный с указанным электронным следящим устройством и питающий указанные моментные электродвигатели.
Предпочтительно, чтобы каждый из модулей содержал электронные и/или механические средства для ограничения углового люфта и скорости каждого моментного электродвигателя. Таким образом, в случае неисправности привода, его люфт ограничивается люфтом моментных электродвигателей и жесткостью торсионных стержней таким образом, что он не повреждается по сравнению с предыдущими стендами.
Фигуры прилагаемых чертежей иллюстрируют варианты осуществления изобретения. На этих фигурах одинаковые ссылочные позиции относятся к одинаковым компонентам.
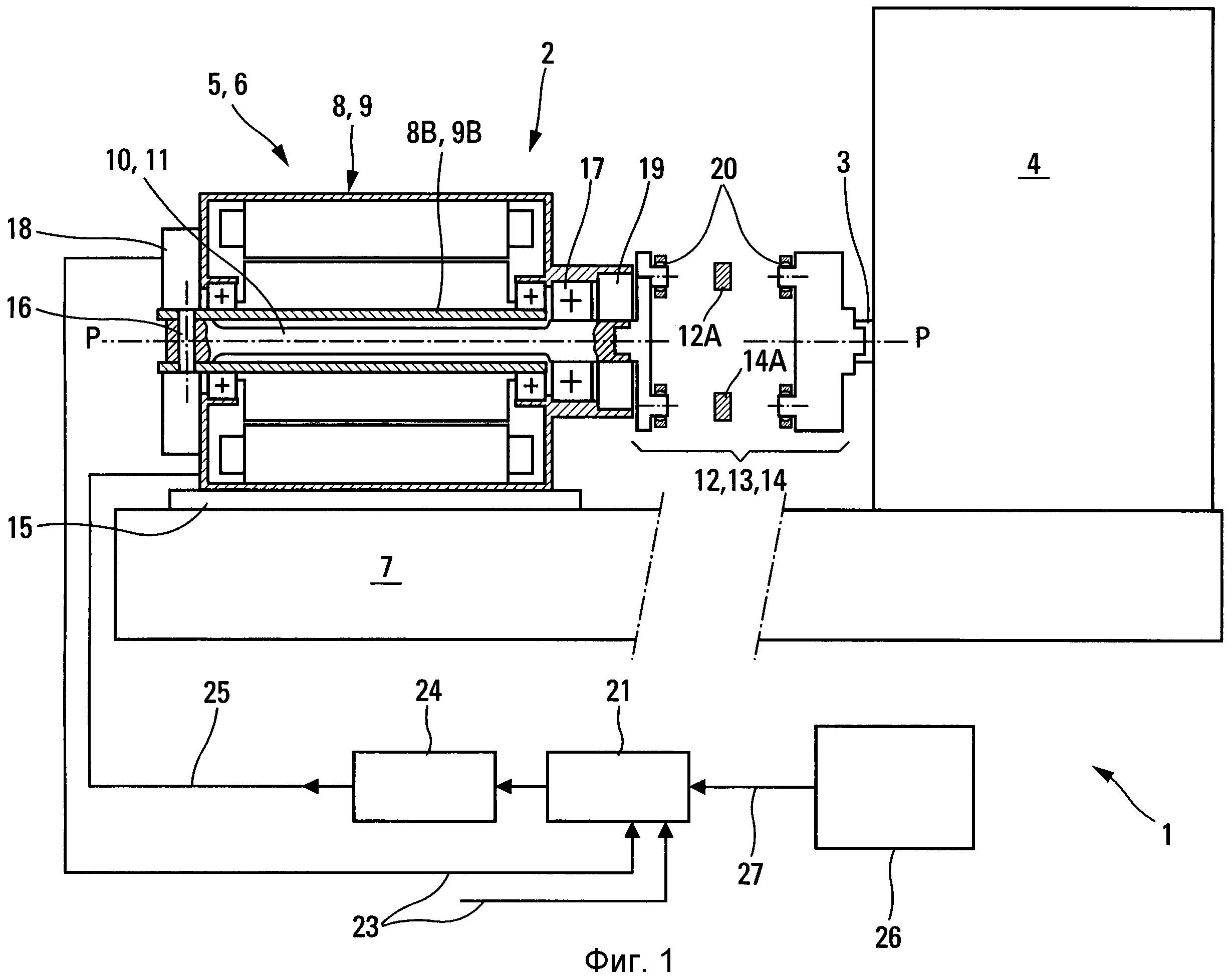
Фиг.1 изображает схематический вид частично в сечении варианта выполнения стенда для испытания динамических нагрузок в соответствии с изобретением.
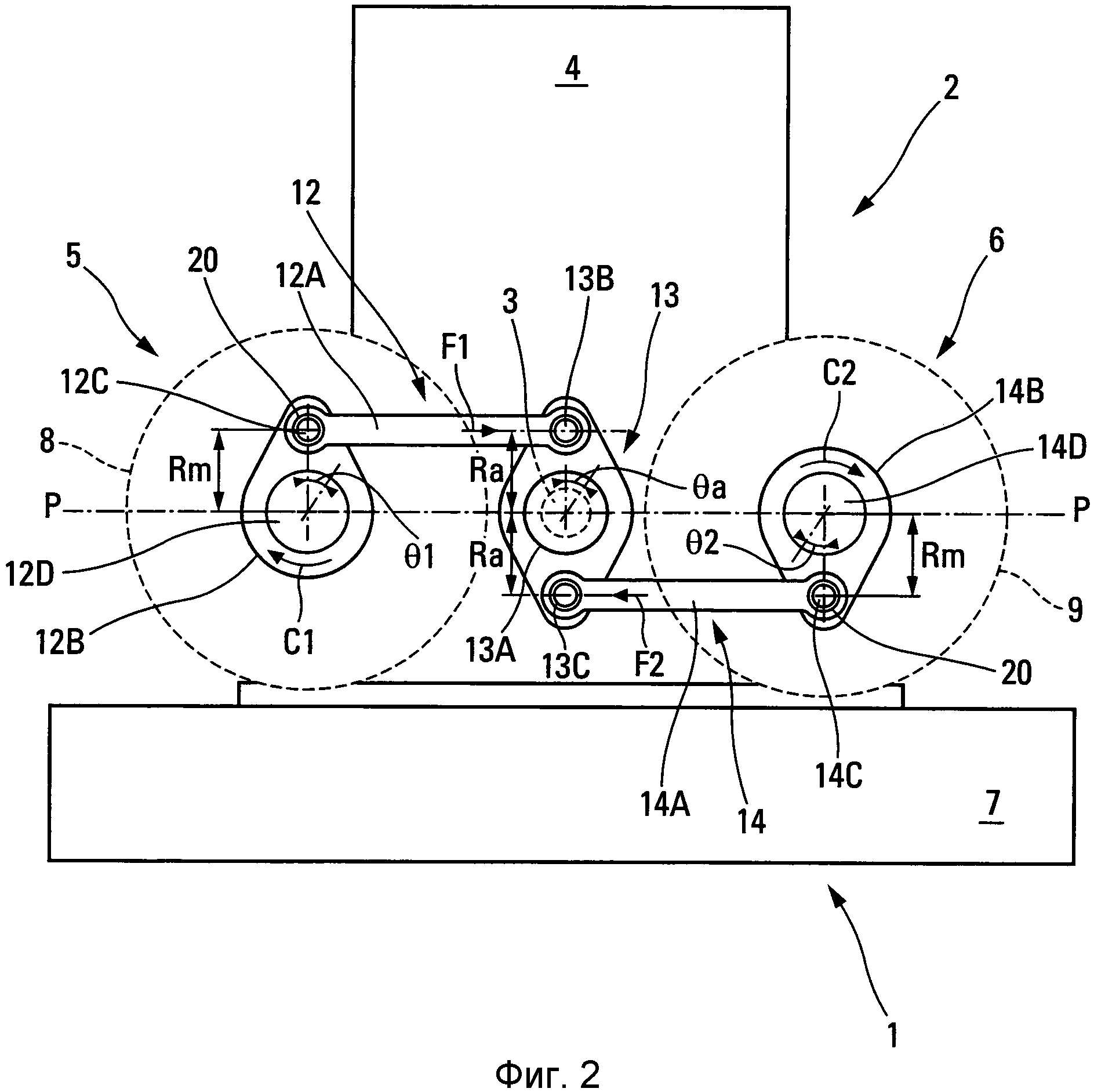
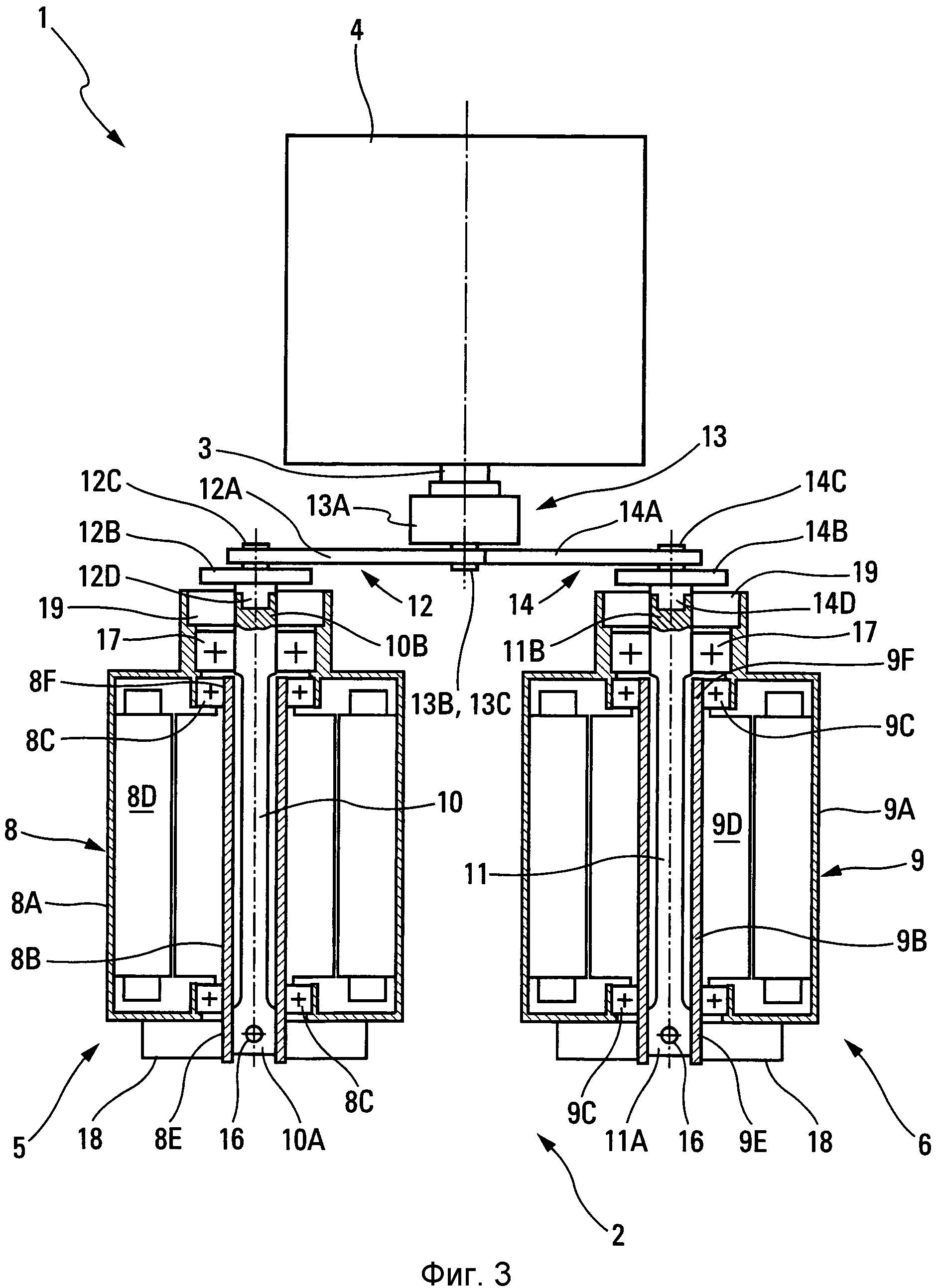
Фиг.2 и 3 изображают схематичные виды, соответственно, сбоку и в изометрии указанного стенда для испытания динамических нагрузок, показанного на Фиг.1.
Стенд для испытания динамических нагрузок, показанный на Фиг.1-3, содержит управляемые средства 2 для приложения радиальных нагрузок и переменных вращающих моментов к вращающемуся валу 3 вращательного стенда 4 для испытания. Как указано выше, цель состоит в том, чтобы воспроизвести насколько возможно достовернее ограничения или смещения, прилагаемые к валу привода, на который установлена поверхность аэродинамического управления ракеты, которая не показана, в результате внезапного изменения направления и скорости последней и, таким образом, отклонения рулевой поверхности. И, таким образом, целью является проектирование конструктивно и эксплуатационно-безопасных и надежных приводов вала.
С этой целью управляемые средства 2 образованы двумя модулями 5 и 6 для воспроизведения радиальных нагрузок и переменных моментов, которые идентичны и симметрично расположены параллельно относительно геометрической оси вала 3 привода. Более конкретно, каждый модуль 5, 6 включает моментный электродвигатель 8, 9, торсионный стержень 10, 11 и соединение 12, 13, 14 из шатуна и кривошипа с валом 3 привода 4.
Конструктивно каждый моментный электродвигатель 8, 9 содержит цилиндрический корпус 8A, 9A, внутри которого с возможностью вращения установлен ведущий вал 8B, 9B посредством внутренних подшипников 8C, 9C. В этом примере моментные двигатели, предпочтительно, являются электрическими, бесщеточного типа с точки зрения рабочих характеристик, надежности, низкой инерции и высокого вращающего момента и т.д., и управление при вращении ведущих валов осуществляется электрическими составляющими (статор, ротор и т.д.), обозначенными ссылочными позициями 8D, 9D на Фиг.1 и расположенными в цилиндрическом корпусе 8A, 9A вокруг соответствующего вала. Естественно, может использоваться моментный двигатель любого другого типа, такой как жидкостный (гидравлический). Кроме того, стенд 1 для испытания динамической нагрузки содержит жесткое устойчивое механическое основание 7, на котором расположены испытываемый привод 3 и посредством общего основания 15 два моментных электродвигателя 8, 9 в их цилиндрических корпусах.
Геометрически, на Фиг.1-3 можно видеть, что параллельные ведущие валы 8B, 9B моментных электродвигателей соответственно расположены симметрично относительно вращающегося вала 3 привода 4, причем геометрические оси ведущих валов 8B, 9B и испытываемого вала 3 находятся в одной горизонтальной плоскости P.
Ведущий вал 8B, 9B каждого моментного электродвигателя 8, 9, предпочтительно, полый и содержит в себе торсионный стержень 10, 11, соосный с соответствующим ему валом и приспособленный для передачи вращающего момента, переданного ведущим валом приводному валу через соединение из шатуна и кривошипа. С этой целью первый конец 10A, 11A каждого торсионного стержня жестко связан с первым концом 8E, 9E полого вала при помощи крепежного элемента 16, такого как штифт или подобного средства, обеспечивающего шарнирное вращение вала с соответствующим торсионным стержнем. И второй конец 10B, 11B каждого из них, обращенный к валу привода, в осевом направлении открыт от второго конца 8F, 9F ведущего вала без соединения с последним и составляет единое целое с соединением 12, 14 из шатуна и кривошипа. Второй конец 10B, 11B каждого торсионного стержня в этом случае удерживается подшипником 17, расположенным в цилиндрическом корпусе. Идентичные торсионные стержни двух модулей естественно приспособлены по размерам для необходимой жесткости при кручении.
Кроме того, можно видеть, что первые концы 8E, 9E ведущих валов (и, таким образом, первые концы торсионных стержней) выступают относительно их соответствующих корпусов 8A, 9A и что они несут датчики 18 углового положения для указанных валов 8B, 9B (роторов бесщеточных моментных электродвигателей). Это относится и ко вторым концам 10B, 11B торсионных стержней 10, 11, на которых установлены датчики 19 углового положения, находящиеся внутри соответствующих цилиндрических корпусов. Используемые датчики 18, 19 должны быть точными и должны иметь контур с внешней синхронизацией и широкой полосой пропускания, например, могут рассматриваться круговой датчик положения, шифратор углового положения, потенциометр или подобного типа.
Что касается соединений между торсионными стержнями 10, 11 модулей и валом 3 привода 4, они содержат два соответствующих и параллельных шатуна 12A, 14A, соединенных на одной стороне через соответствующие кривошипы 12B, 14B с торсионными стержнями 10, 11 и с другой стороны через общий двойной кривошип 13 с валом 3 привода 4. Эти два шатуна 12A, 14A, таким образом, расположены в плоскости, перпендикулярной параллельным геометрическим осям ведущих валов 8B, 9B (и, таким образом, торсионных стержней) модулей 5, 6 и вала привода, и расположены с симметричным смещением на 180° друг от друга относительно вала 3 привода. На Фиг.1 соединения 12, 13, 14 показаны с пространственным разделением деталей для ясности.
В частности, каждый простой кривошип 12B, 14B имеет вблизи его концов два параллельных пальца 12C, 12D, 14C, 14D кривошипа, отклоняющихся на 90° и противоположных относительно рычага или корпуса кривошипа, причем первый отклоненный палец 12D, 14D каждого кривошипа является соосным и составляющим одно целое со вторым концом 8F, 9F соответствующего торсионного стержня, тогда как второй палец 12C, 14C кривошипа несет один из концов шатуна 12A, 14A.
На Фиг.2 лучше видно, что простые кривошипы 12B, 14B установлены со смещением на 180° друг от друга на соответствующих торсионных стержнях 10, 11 таким образом, что, как показано на фигуре, кривошип 12B направлен вверх, тогда как кривошип 14B направлен вниз.
Кроме того, общий двойной кривошип 13 имеет на одной стороне центральный палец 13A кривошипа, соединенный с валом 3 привода (например, радиальными штифтами, которые не показаны, соединяющими при вращении как единое целое вал с центральным пальцем кривошипа), и на другой стороне два диаметрально противоположных оконечных пальца 13B, 13C кривошипа относительно центрального пальца 13A кривошипа, на которых соответственно установлены вторые концы шатунов 12A, 14A.
Кроме того, между концами двух шатунов 12A, 14A и их соответствующими пальцами 12C, 14C, 13B, 13C кривошипов 12B, 14B, 13 могут находиться соединения 20 с угловым зазором, такие как коленчатые сферические соединения или упругие шарниры.
На Фиг.2 также можно видеть, что расстояние Ra, отделяющее каждый противоположный палец 13B, 13C кривошипа от центрального пальца 13A двойного кривошипа 13, равно расстоянию Rm, отделяющему первые два пальца 12D, 14D кривошипа от вторых двух пальцев 12C, 14C простых кривошипов 12B, 14B, таким образом, что два параллельных шатуна 12A, 14A расположены горизонтально на Фиг.2 и ортогонально валу 3 привода. Естественно, могут быть выбраны другие соотношения без вреда для работы стенда, причем два параллельных шатуна тогда могут быть просто наклонены относительно горизонтали.
Эти управляемые средства воспроизведения 2 радиальных нагрузок и вращающих моментов, осуществленные этими двумя модулями 5, 6, также содержат электронные устройства. Например, как показано на Фиг.1, электронное следящее устройство 21 позволяет определять угловое положение каждого из двух поворотных моментных электродвигателей, как функцию углового положения вала привода, при помощи двух датчиков 18 углового положения, соединенных соответствующими соединениями 23 со следящим устройством. Прилагаемый вращающий момент, таким образом, может регулироваться с учетом того, что последний пропорционален угловой разности между угловым положением моментного электродвигателя и угловым положением привода. На выходе электронного следящего устройства 21 расположен электронный блок 24 питания для питания, например, моментных электродвигателей 8, 9 посредством соединения 25, ограничивающий прилагаемый вращающий момент и максимальную скорость до величин, совместимых с возможностями испытываемого привода, предотвращая повреждение последнего.
Естественно, испытательная электроника 26 соединена со следящим устройством 21 соединением 27 и, более определенно, включает специальные программы для каждого типа испытываемых приводов, как функцию вариантов применения, задач, ограничений, размеров и т.д.
Благодаря некоторой функциональной свободе, создаваемой коленчатыми сочленениями 20 из соединений шатуном и кривошипом, обеспечивающими компенсацию люфтов, интервалов между осями и угловыми зазорами и, таким образом, создающими изостатическое выравнивание стенда, точное расположение между моментными электродвигателями 8, 9 и приводом 4 не требуется. С другой стороны, датчики 18 углового положения двух моментных электродвигателей позволяют определять угол вращения вращающегося вала 3 испытываемого привода 4 даже при наличии отклонения (стрелка), создаваемого приложением радиальной нагрузки соответствующим шатуном (и представляющего действие аэродинамических нагрузок, прилагаемых к рулевой поверхности ракеты и, таким образом, к валу привода).
Угол θa вращения выходного вала и отклонение Ya последнего могут быть определены следующими формулами (Фиг.2):
θa = Rm/Ra·(θ1+θ2)/2
и
Ya = Rm·(θ1-θ2)/2,
где Rm = плечо рычага шатуна-кривошипа моментного электродвигателя;
Ra = плечо рычага шатуна-кривошипа привода;
θ1, θ2 = углы вращения выходных валов моментных электродвигателей.
Управление радиальным напряжением и вращающим моментом, генерируемым средствами 2 воспроизведения, соответствующими изобретению, достигнуто благодаря откалиброванной жесткости каждого торсионного стержня 10, 11, действующего как датчик вращающего момента, или калиброванного измерителя крутящего момента в соответствии с откалиброванной жесткостью (угловое смещение между углом кручения на его конце с ведущим валом и углом кручения на его конце с шатуном, дающее, для данной жесткости, определенный вращающий момент).
Предположим, что радиальное напряжение Fr и вращающий момент C прилагаются к валу 3 испытываемого привода. Каждый из двух применяемых моментных электродвигателей 8, 9 генерирует вращающий момент C1 и C2 и прилагает к шатунам 12A и 14A через стержни 10 и 11 радиальное напряжение F1 и F2.
Согласно обычным зависимостям механики это дает:
F1 = С1/Rm и F2 = C2/Rm (Rm: см. выше),
C = (F1+F2)·Ra (Ra: см. выше),
Fr = F1 + F2.
Исходя из этого, выводятся управляемые напряжения и вращающие моменты для двух моментных электродвигателей:
F1 = (C/Ra+Fr)/2 и F2 = (C/Ra-Fr)/2,
C1 = Rm·(C/Ra+Fr)/2.
C2 = Rm·(C/Ra-Fr)/2.
Исходя из этого, получают вращающие моменты C1 и C2 двух моментных электродвигателей следующим образом.
Известно, что угловое положение θa вала привода известно в режиме реального времени посредством вычисления на основе информации от датчиков 18, 19 измерения угловой скорости, переданной в следящее устройство 21 (см. вычисление θa выше). Каждый моментный электродвигатель отслеживается по положению его датчиком и электронным следящим устройством 21 и питающим устройством 24.
Конечно, полоса пропускания следящего устройства более широкая, чем у испытываемого привода 4, для обеспечения пригодной жесткой обратной связи с незначительным сдвигом фаз и ослаблением без искажения сигналов. С этой целью используется, по меньшей мере, в два раза более широкая полоса пропускания.
Кроме того, другое преимущество отслеживания положения каждого моментного электродвигателя состоит в том, что колебания интерференционного момента отклоняются (момент режекции или синхронный момент) так же, как и сухое, и вязкостное трение (моменты прокатки, гистерезисные моменты).
Угловое положение θco (θ1, θ2), задаваемое моментному электродвигателю 8, 9, является функцией желаемого профиля C1 (или C2) момента. Этот профиль вращающего момента определяется перед испытаниями, чтобы сделать то, что было решено воспроизвести для вала привода (вращающий момент с углом x°). Известно, что в каждый момент времени такой вращающий момент с таким радиальным напряжением будет достигнут. Например, для вращающего момента для моделирования с формой C1 = Kθa + СО, где K является аэродинамической жесткостью (в зависимости от точки полета, высоты, скорости и т.д.), Ga является угловым положением вала привода, и СО является независимым постоянным вращающим моментом для Ga, и предполагая, что жесткость торсионного стержня равна KO, угол θco представляет следующее:
KO (θ-θa) = Kθa + СО,
то есть θco = (K/K0 +1) θa + СО/КО, при условии, что θ по существу равно θco.
Таким образом, функция перехода от θ к θco в результате слежения за положением моментного электродвигателя будет следующей:
θ/θco = 1/(1+a·p + b·p2 + c·p3),
где
b=1/ωО2,
a=2ξ/ωО,
c/b << 1/ωО,
p = оператор Лапласа.
Пороговая амплитуда импульса выбрана таким образом, чтобы она была приблизительно вдвое выше, чем у привода.
ξ = затухание аппроксимированной функции преобразования второго порядка.
Чтобы улучшить динамику управления вращающим моментом, предпочтительно выполнять фазовое опережение, профильтрованное на θco.
Например, углы θ1 и θ2 моментных электродвигателей 8, 9 могут охватывать угловой диапазон приблизительно 20-25°. Во время испытаний эти углы θ1 и θ2, а также угол θa вращающегося вала 3 привода 4 естественно очень близки друг другу, но несколько отличаются из-за отклонения Ya вращающегося вала под действием радиальных нагрузок от шатунов.
Также следует отметить, что каждый модуль содержит электронные и механические средства (не показаны на фигурах) для ограничения углового люфта и скорости моментных электродвигателей, чтобы предохранить привод и соответственно сделать стенд надежным и защищенным.
Таким образом, в дополнение к тому, что компоненты стенда быстро собираются и демонтируются благодаря модульности последнего и отсутствию взаимодействия между указанными компонентами, такой динамический стенд предусматривает более легкое выполнение приводов, проверку и обоснование спецификаций относительно эксплуатационных потребностей (вращающий момент/скорость, ускорение, жесткость и т.д.), достоверную оценку заданного рабочего профиля полета и более реалистическую квалификацию и сертификацию привода.
Система для управления траекторией реактивного движущегося тела
Система транспортировки и сброса грузов транспортного летательного аппарата
Способ и система для уклонения воздушного движущегося объекта от перехватывающего летательного аппарата
Способ автоматического управления головкой самонаведения, установленной на реактивном снаряде, в частности на ракете
Способ автоматического управления гиродатчиком угловой скорости тангажа, установленным на летательном аппарате
Турбомашина, содержащая детонационную камеру, и летательный аппарат, оснащенный такой турбомашиной
Прямоточный воздушно-реактивный двигатель, включающий детонационную камеру, и летательный аппарат, содержащий такой двигатель
Двигатель с незатухающей детонационной волной и летательный аппарат, оборудованный таким двигателем
Устройство маркировки цели и система обработки цели, содержащая такое устройство маркировки цели
Способ и устройство многоцелевой оптимизации
Система для управления траекторией реактивного движущегося тела
Система транспортировки и сброса грузов транспортного летательного аппарата
Способ и система для уклонения воздушного движущегося объекта от перехватывающего летательного аппарата
Способ автоматического управления головкой самонаведения, установленной на реактивном снаряде, в частности на ракете
Способ автоматического управления гиродатчиком угловой скорости тангажа, установленным на летательном аппарате
Турбомашина, содержащая детонационную камеру, и летательный аппарат, оснащенный такой турбомашиной
Прямоточный воздушно-реактивный двигатель, включающий детонационную камеру, и летательный аппарат, содержащий такой двигатель
Двигатель с незатухающей детонационной волной и летательный аппарат, оборудованный таким двигателем
Устройство маркировки цели и система обработки цели, содержащая такое устройство маркировки цели

