Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ СИСТЕМОЙ СТАБИЛИЗАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области ракетостроения, а конкретно к способам управления БПЛА в условиях внешних возмущений с неизвестными статистическими свойствами, приводящих к изменению траектории движения. Оно может быть использовано в приборном обеспечении БПЛА.
Известно, что динамические свойства БПЛА без бортовой системы стабилизации не обеспечивают требуемую точность управления (Проектирование зенитных управляемых ракет / Под ред. И.С.Голубева и В.Г.Светлова. - Изд. второе, перераб. и доп. - М.: Изд. МАИ, 2001). Это объясняется недостаточным моментом аэродинамического демпфирования и большой зависимостью реализуемой перегрузки от статической устойчивости БПЛА. Как следствие, реакция БПЛА на входную команду управления при действии внешних возмущений (случайные порывы ветра, взрывная волна от подрыва боевых частей других БПЛА) представляет собой длительно незатухающий колебательный процесс с большим перерегулированием, что приводит к колебательной форме траектории полета БПЛА, большим промахам (например, для ЗУР), а в некоторых случаях - к разрушению БПЛА на траектории.
Таким образом, управление высокоточными БПЛА возможно только с помощью бортовых систем стабилизации, включающих блоки компенсации действия возмущений.
Известен способ формирования сигналов управления симметричной ракетой в автопилоте с помощью двух каналов поперечного управления в плоскостях крыльев ракеты, в каждом из которых измеряются текущие значения боковых ускорений и угловых скоростей вращения ракеты относительно поперечных осей, и на управление рулями передаются сигналы ошибки, пропорциональные измеренным параметрам, и канала управления вокруг продольной оси, в котором измеряется угол крена ракеты и передается пропорциональный ему сигнал на управление элеронами (Проектирование зенитных управляемых ракет / Под ред. И.С.Голубева и В.Г.Светлова. - Изд. второе, перераб. и доп. - М.: Изд. МАИ, 2001). Данный способ управления реализуется в контуре стабилизации нормальной перегрузки путем формирования в блоке формирования управления сигнала, пропорционального требуемой величине нормальной перегрузки, и вычислении ошибки стабилизации на основе сигналов, получаемых от дифференцирующего гироскопа и датчика линейных ускорений. На основе величины ошибки стабилизации вычисляется сигнал, поступающий на вход рулевого привода.
Системы стабилизации этого типа обеспечивают достаточно хорошее парирование ветровых регулярных и случайных возмущений. Но, тем не менее, требуется дальнейшее расширение их возможностей по компенсации действия любых возмущений, удовлетворяющих заданным ограничениям, и увеличение быстродействия.
За наиболее близкий аналог (прототип) заявляемого изобретения принят способ формирования сигнала управления в автопилоте (патент №2293686 «Автопилот для зенитной управляемой ракеты, стабилизированной по крену», 2005 г.). Данный способ расширяет функциональные возможности известного автопилота и заключается в следующем: управление формируется с помощью двух идентичных по структуре каналов поперечного управления в плоскостях крыльев ракеты, в каждом из которых измеряются текущие значения боковых ускорений и угловых скоростей вращения ракеты относительно поперечных осей и на управление рулями передаются сигналы ошибки, пропорциональные измеренным параметрам, при этом коэффициенты пропорциональности корректируются обратно пропорционально величине скоростного напора, и канала управления вокруг продольной оси, в котором измеряется угол крена ракеты и передается пропорциональный ему сигнал на управление элеронами.
Основным недостатком известного способа является то, что управление в контуре стабилизации формируется без учета будущей реакции БПЛА на действующие внешние возмущения, а формируется только на основе измеренного текущего ускорения и угловой скорости вращения, что приводит к увеличению ошибки стабилизации и, как следствие (для ЗУР), к увеличению промаха при наведении.
Перед заявляемым изобретением поставлена задача - разработать способ формирования сигнала управления системой стабилизации БПЛА с учетом воздействия внешних возмущений с неизвестными статистическими свойствами.
Решение поставленной задачи достигается за счет ввода в контур стабилизации нормальной перегрузки управляющего сигнала, сформированного в блоке формирования сигнала стабилизации на базе расчетов с использованием информации о текущем состоянии фазового вектора БПЛА, обеспечивающего заданное значение нормальной перегрузки и компенсирующего действующие возмущения.
Задача компенсации внешних ограниченных возмущений в предлагаемой заявке решается на основе прогнозирования гарантированной ошибки системы стабилизации, которая не будет увеличиваться в процессе движения при действии любых возмущений, удовлетворяющих заданным ограничениям.
Заявляемый способ формирования управления нормальной перегрузкой БПЛА поясняется чертежами.
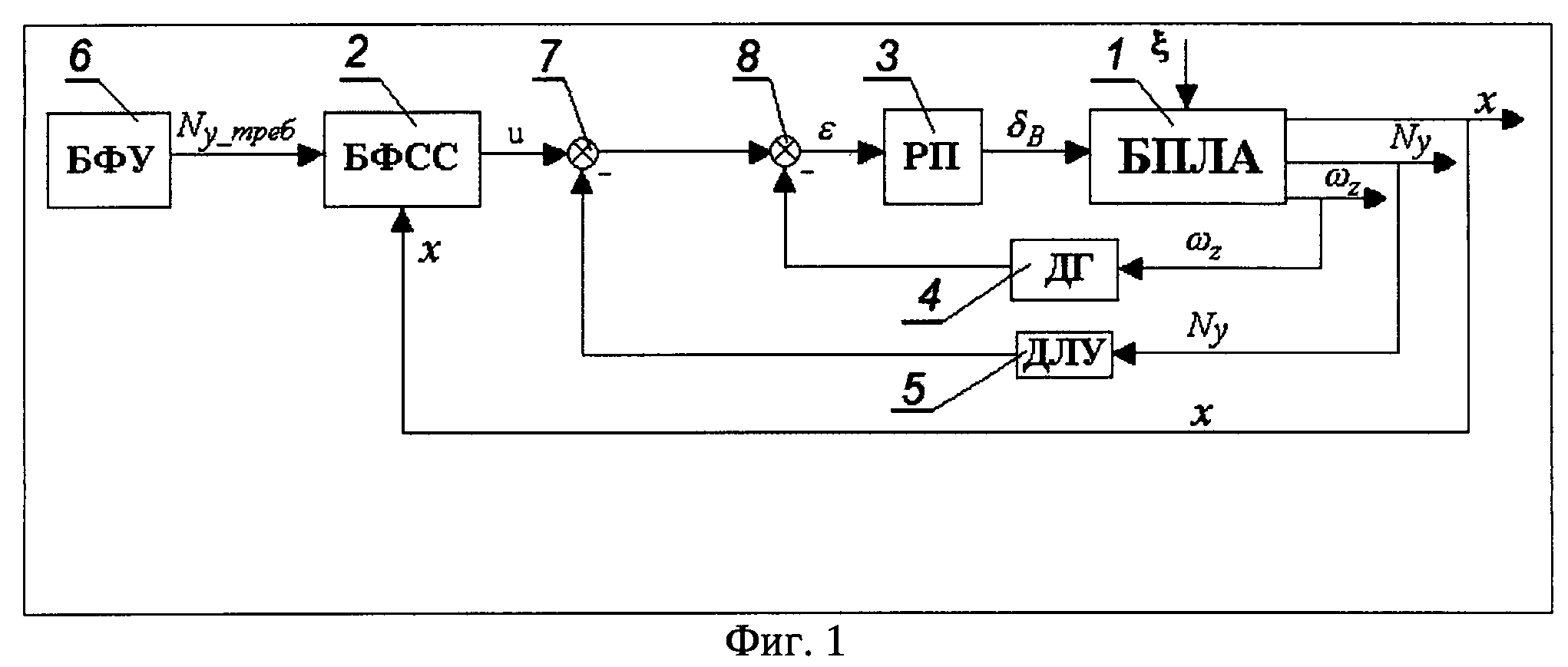
На фиг.1 изображена структурная схема контура стабилизации нормальной перегрузки БПЛА.
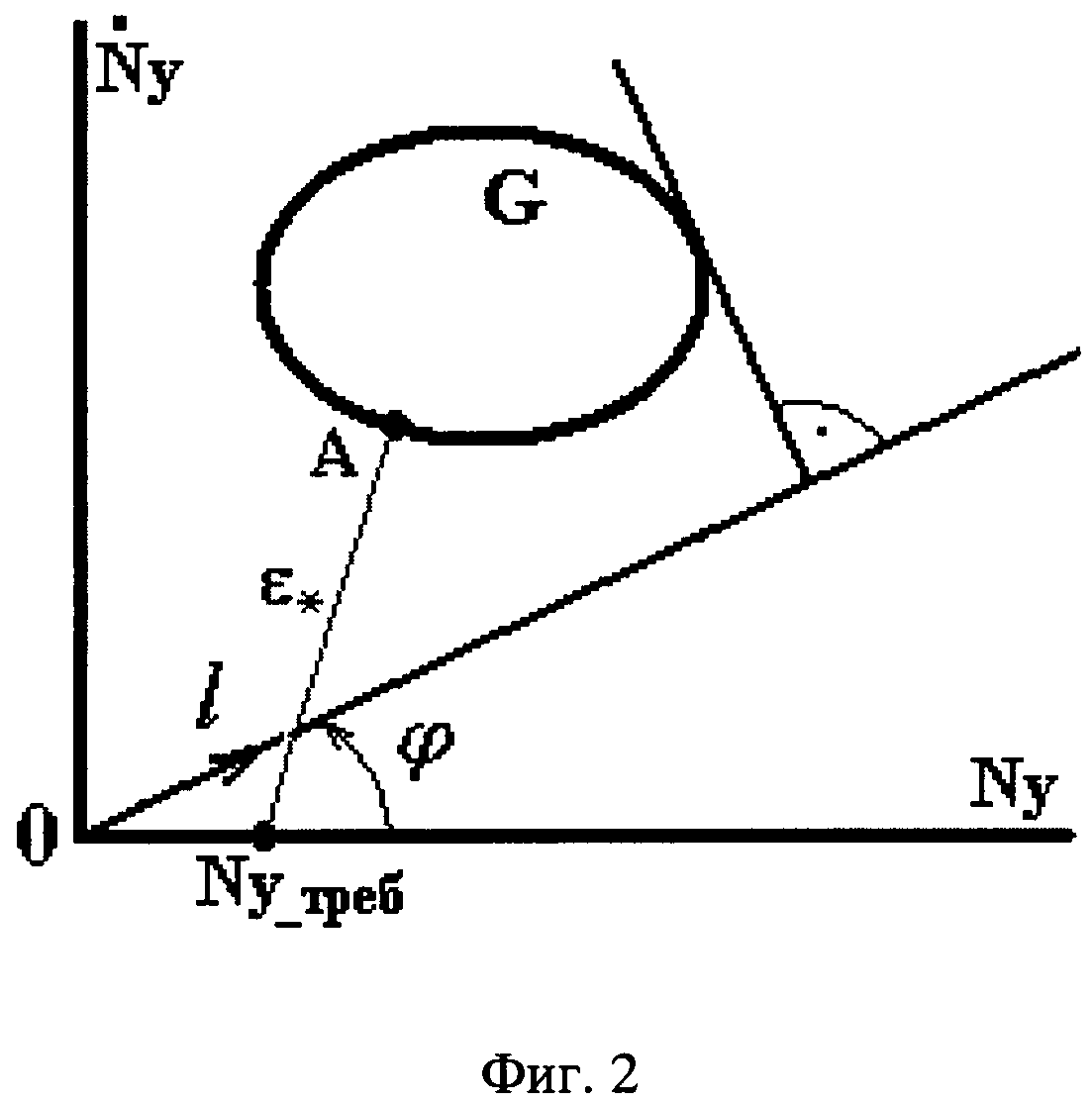
На фиг.2 показано взаимное расположение минимаксной области достижимости БПЛА (область G).
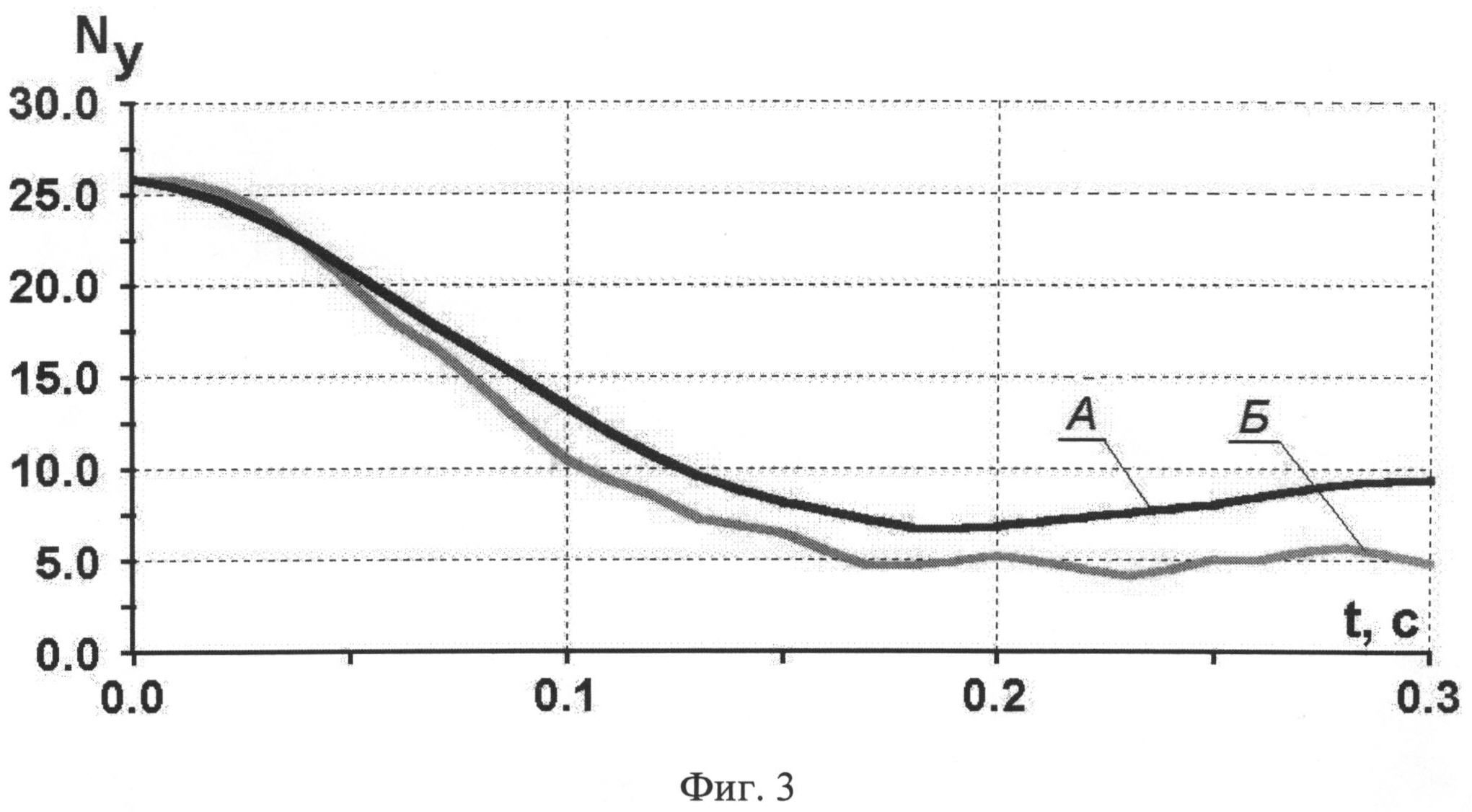
На фиг.3 приведены графики переходных процессов в системе стабилизации нормальной перегрузки.
На фиг.4 и 5 приведены примеры в виде графиков изменения нормальной перегрузки ЗУР.
Поставленная задача решается следующим образом.
В известный контур стабилизации нормальной перегрузки БПЛА 1 (фиг.1) с дифференцирующим гироскопом и датчиком линейных ускорений вводится дополнительный блок формирования сигнала стабилизации (БФСС) 2, в котором формируется сигнал управления, компенсирующий действие возмущений. Рассматриваемая система стабилизации (Фиг.1) включает БПЛА 1 как объект регулирования, рулевой привод (РП) 3 и две отрицательные обратные связи: по угловой скорости ωz, измеряемой дифференцирующим гироскопом (ДГ) 4, и по нормальной перегрузке Ny, измеряемой датчиком линейных ускорений (ДЛУ) 5. Входом для системы стабилизации является команда управления u, формируемая в блоке формирования сигнала стабилизации (БФСС) 2. Входами для БФСС является требуемое значение нормальной перегрузки Ny треб, формируемое в блоке формирования управления (БФУ) 6, и вектор текущего состояния БПЛА x. На БПЛА действует возмущение ξ. На схеме (Фиг.1) обозначено: ky, kДГ, kДЛУ - коэффициенты усиления, δВ - угол закладки руля высоты, ε - сигнал на входе рулевого привода. Позициями 7 и 8 обозначены блоки вычитания.
Для оценки гарантированной ошибки стабилизации используется следующий подход.
Расчет управляющего сигнала u, компенсирующего действие возмущений, происходит на основе решения следующей антагонистической дифференциальной игры, в которой участвуют два игрока, преследующие противоположные интересы. Первый игрок выбирает управление БПЛА, а второй игрок - внешнее возмущение.
Пусть первый игрок, действующий в интересах БПЛА, ищет минимум критерия, определяемого как функционал:

интересы второго игрока (возмущающего воздействия) противоположны.
Здесь Ny треб - требуемое значение нормальной перегрузки БПЛА,  - скорость изменения нормальной перегрузки. Момент окончания переходного процесса Т не задан и определяется в процессе стабилизации.
- скорость изменения нормальной перегрузки. Момент окончания переходного процесса Т не задан и определяется в процессе стабилизации.
Требуется найти управление БПЛА, обеспечивающее минимум функционала в момент времени Т в предположении, что интересы второго игрока противоположны. В данной дифференциальной игре оптимальными способами выбора управлений игроков являются позиционные стратегии.
Для решения поставленной задачи используем подход, основанный на решении вспомогательных задач минимаксного программного управления.
Управления игроков будем выбирать в дискретные моменты времени
t0=0, t0+Δt, t0+2Δt, …,
и так далее, где Δt - шаг выбора управления.
Для выбора управления в позиции {t*,z(t*)} (здесь z - вектор состояния системы) составляется вспомогательная минимаксная задача оптимального программного управления, которая ставится как исходная конфликтная задача, но решается она из позиции {t*,z(t*)} и управления игроков определяются только как функции времени на интервале времени [t*,T).
В результате решения вспомогательной минимаксной задачи определяется программное управление  и в качестве оптимального управления первого игрока в позиции {t*,z(t*)} принимается
и в качестве оптимального управления первого игрока в позиции {t*,z(t*)} принимается
 .
.
С выбранным управлением происходит переходной процесс в течение времени Δt. Одновременно реализуется некоторое возмущение ξ, которое не измеряется в процессе функционирования системы стабилизации. В позиции {t*+Δt,z(t*+Δt)} вновь составляется вспомогательная задача и т.д.
Решение вспомогательной задачи базируется на расчете для ряда будущих гипотетических моментов окончания переходного процесса минимаксной области достижимости (G) системы стабилизации в плоскости двух координат: нормальная перегрузка Ny и скорость ее изменения  (Фиг.2). Особенность вспомогательной задачи состоит в том, что минимаксная (область G на фиг.2) строится с учетом противодействия второго игрока.
(Фиг.2). Особенность вспомогательной задачи состоит в том, что минимаксная (область G на фиг.2) строится с учетом противодействия второго игрока.
Алгоритм вычисления управления u в позиции {t*,z(t*)} с использованием разработанного способа состоит из следующих операций.
1. Задается начальный гипотетический момент окончания переходного процесса T*=t*+ΔT, где ΔT - шаг изменения T*.
2. В плоскости координат  строится минимаксная ОД игроков G для гипотетического момента окончания переходного процесса T* (фиг.2).
строится минимаксная ОД игроков G для гипотетического момента окончания переходного процесса T* (фиг.2).
3. Определяется точка общей ОД, ближайшая к заданной точке  (точка А). Здесь заданная точка соответствует требуемому значению перегрузки, подаваемому на вход БФСС.
(точка А). Здесь заданная точка соответствует требуемому значению перегрузки, подаваемому на вход БФСС.
4. Определяется гипотетический промах ε*(t*,T*).
5. Определяется программа управления первого игрока  , обеспечивающая перемещение из позиции {t*,z(t*)} в точку А в момент T* и управление и
, обеспечивающая перемещение из позиции {t*,z(t*)} в точку А в момент T* и управление и  .
.
6. Гипотетический момент окончания переходного процесса увеличивается на величину ΔT и вновь определяется ε*(t*,T*+ΔТ),  ) итак далее.
) итак далее.
7. Оптимальный гипотетический момент окончания переходного процесса  в позиции {t*,z(t*)} находится из условия
в позиции {t*,z(t*)} находится из условия
 ,
,
где τ - максимальное время окончания переходного процесса.
8. В качестве оптимального управления  в позиции {t*,z(t*)} принимается
в позиции {t*,z(t*)} принимается  , то есть управление, вычисленное по взаимному расположению ОД игроков и заданной точки в оптимальный гипотетический момент окончания переходного процесса
, то есть управление, вычисленное по взаимному расположению ОД игроков и заданной точки в оптимальный гипотетический момент окончания переходного процесса  .
.
Результаты применения предлагаемого способа формирования управления в контуре стабилизации нормальной перегрузки БПЛА для компенсации действия внешних возмущений поясняется следующими примерами.
На фиг.3 приведены графики переходных процессов в системе стабилизации нормальной перегрузки при действии возмущения вида ξ=ξmaxsin(ωt+φ), один из которых получен при формировании управления предложенным способом (кривая Б), второй получен при действии постоянного управляющего сигнала  (кривая А). Требуемое значение нормальной перегрузки, подаваемое с БФУ, равнялось
(кривая А). Требуемое значение нормальной перегрузки, подаваемое с БФУ, равнялось  .
.
Результаты компьютерного моделирования при подаче постоянного входного сигнала управления  и при действии одинаковых возмущений показали, что быстродействие системы стабилизации перегрузки БПЛА, управление в которой формируется предложенным способом выше, чем у известной системы стабилизации. Установившаяся ошибка управления в контуре стабилизации перегрузки БПЛА, управление которым формируется предложенным способом, всегда меньше, чем в прототипе при действии аналогичного возмущения.
и при действии одинаковых возмущений показали, что быстродействие системы стабилизации перегрузки БПЛА, управление в которой формируется предложенным способом выше, чем у известной системы стабилизации. Установившаяся ошибка управления в контуре стабилизации перегрузки БПЛА, управление которым формируется предложенным способом, всегда меньше, чем в прототипе при действии аналогичного возмущения.
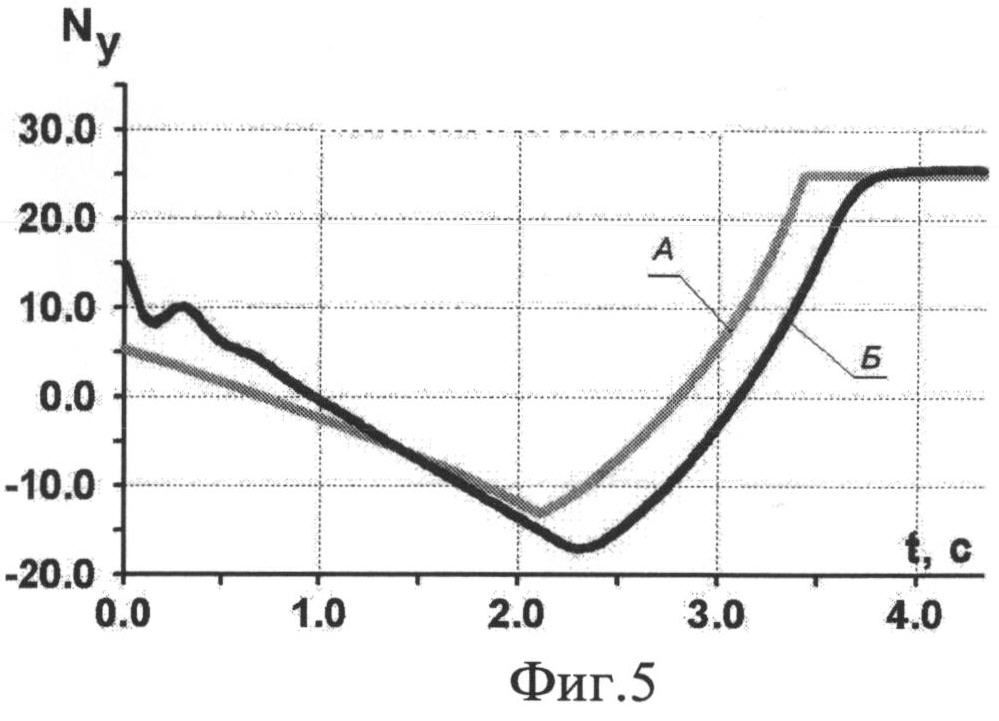
На фиг.4 и фиг.5 приведены примеры в виде графиков изменения нормальной перегрузки ЗУР в процессе наведения по методу пропорциональной навигации на маневрирующую цель при действии возмущения с использованием предложенного способа стабилизации.
На этих графиках представлено:
- требуемое значение перегрузки, вычисляемое в блоке формирования управления (БФУ) (кривая А);
- график изменения перегрузки в процессе наведения ЗУР на цель при формировании управления в контуре стабилизации перегрузки ЗУР предложенным способом (кривая Б).
Управление цели выбиралось по закону 
Здесь управлением цели является угол атаки αцели, где αmax - максимально допустимый угол атаки.
На ЗУР действовало возмущение вида ξ=ξmaxsin(ωt+φ).
Как видно из графиков, система стабилизации ЗУР, управление в которой формируется предложенным способом, превосходит как по точности, так и по быстродействию систему стабилизации прототипа, в результате возрастает точность наведения ЗУР. Так, например, промах, полученный при формировании управления системой стабилизации ЗУР предложенным способом, равняется 4,25 м, а при использовании системы стабилизации прототипа - 9,41 м, т.е. точность наведения возросла более чем в 2 раза.
Таким образом, изобретение позволило получить технический результат, а именно повысить быстродействие и точность управления системой стабилизации нормальной перегрузки БПЛА, что привело к повышению точности управления (для ЗУР - к повышению точности наведения). В предлагаемом изобретении для вычисления управляющего сигнала, компенсирующего действие внешних возмущений, не требуется информация о характере возмущения, т.к. управление вычисляется на основе анализа взаимного расположения минимаксной области достижимости БПЛА, которая строится с учетом всевозможных возмущений, удовлетворяющих заданным ограничениям, и заданного значения нормальной перегрузки.
Способ формирования сигнала управления системой стабилизации нормальной перегрузки беспилотного летательного аппарата, включающий измерение параметров движения беспилотного летательного аппарата, вычисление сигнала управления и ввод его в контур стабилизации нормальной перегрузки, отличающийся тем, что для вычисления сигнала управления на основе расчета областей достижимости в плоскости координат «нормальная перегрузка - скорость изменения нормальной перегрузки» для ряда будущих дискретных моментов времени окончания переходного процесса выбирают оптимальный гипотетический момент времени окончания переходного процесса, анализируют положение области достижимости в плоскости координат «нормальная перегрузка - скорость изменения нормальной перегрузки» в этот момент времени и на основе этого анализа вычисляют сигнал управления.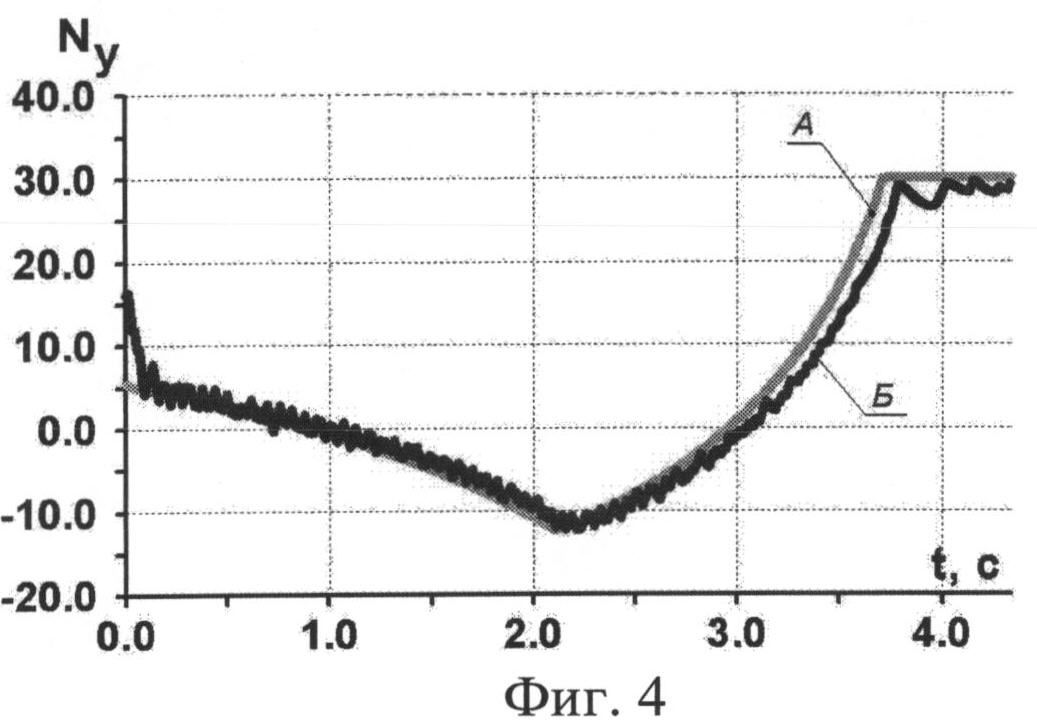
Крыло гиперзвукового летательного аппарата в условиях его аэродинамического нагрева
Уплотнительное устройство канала ствола артиллерийского орудия
Крыло гиперзвукового летательного аппарата в условиях его аэродинамического нагрева
Способ термической обработки конструкционных сталей на высокопрочное состояние
Способ термической обработки изделия из деформируемого сплава вт23
Способ упрочняющей термической обработки углеродистых инструментальных сталей
Способ управления аэродинамическими характеристиками гиперзвукового летательного аппарата
Способ термообработки изделий из конструкционных сталей
Способ термической обработки конструкционных сталей на высокопрочное состояние
Способ термической обработки конструкционных сталей
Крыло гиперзвукового летательного аппарата в условиях его аэродинамического нагрева
Уплотнительное устройство канала ствола артиллерийского орудия
Крыло гиперзвукового летательного аппарата в условиях его аэродинамического нагрева
Способ термической обработки конструкционных сталей на высокопрочное состояние
Способ термической обработки изделия из деформируемого сплава вт23
Способ упрочняющей термической обработки углеродистых инструментальных сталей
Способ управления аэродинамическими характеристиками гиперзвукового летательного аппарата
Способ термообработки изделий из конструкционных сталей
Способ термической обработки конструкционных сталей на высокопрочное состояние
Способ термической обработки конструкционных сталей

