Результат интеллектуальной деятельности: СПОСОБ ПОИСКА НЕИСПРАВНОГО БЛОКА В ДИСКРЕТНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЕ
Вид РИД
Изобретение
Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ поиска неисправного блока в динамической системе (Патент на изобретение №2439648 от 10.01.2012 по заявке №2010142159/08(060530), МКИ6 G05B 23/02, 2012), основанный на многократном интегрировании выходного сигнала блока с весами  , где αl - вещественная константа, l - количество констант.
, где αl - вещественная константа, l - количество констант.
Недостатком этого способа является то, что он обеспечивает определение дефектов только в непрерывной динамической системе.
Наиболее близким техническим решением (прототипом) является способ поиска неисправного блока в дискретной динамической системе (Патент на изобретение №2444774 от 10.03.2012 по заявке №2011101271/08(001575), МКИ6 G05B 23/02, 2012).
Недостатком этого способа является то, что он обеспечивает определение дефектов с невысокой различимостью, то есть обладает невысокой помехоустойчивостью.
Технической задачей, на решение которой направлено данное изобретение, является улучшение помехоустойчивости способа диагностирования дискретных систем автоматического управления путем улучшения различимости дефектов. Это достигается путем применения многократного вычисления интегральных оценок динамических характеристик для нескольких различных значений параметра интегрирования α1, α2…αn.
Поставленная задача достигается тем, что предварительно регистрируют реакцию заведомо исправной дискретной во времени системы fjном(t), j=1, 2…, k для N дискретных тактов диагностирования t∈[1,N] с дискретным постоянным шагом Ts на интервале наблюдения [0,Tk] (где Tk=Ts·N) в k контрольных точках, и многократно определяют (одновременно) интегральные оценки выходных сигналов  , j=1, …, k, l=1, …, n дискретной системы для n значений параметра дискретного интегрирования αl, для чего в момент подачи тестового сигнала на вход дискретной системы с номинальными характеристиками одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд для n параметров интегрирования в каждой из k контрольных точек с весами
, j=1, …, k, l=1, …, n дискретной системы для n значений параметра дискретного интегрирования αl, для чего в момент подачи тестового сигнала на вход дискретной системы с номинальными характеристиками одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд для n параметров интегрирования в каждой из k контрольных точек с весами  с шагом Ts секунд, путем подачи на первые входы k·n блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают дискретные экспоненциальные сигналы
с шагом Ts секунд, путем подачи на первые входы k·n блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают дискретные экспоненциальные сигналы  с шагом Ts секунд для n блоков дискретного интегрирования, выходные сигналы k·n блоков перемножения подают на входы k·n блоков дискретного интегрирования с шагом Ts секунд, интегрирование завершают в момент времени Тк, полученные в результате дискретного интегрирования оценки выходных сигналов
с шагом Ts секунд для n блоков дискретного интегрирования, выходные сигналы k·n блоков перемножения подают на входы k·n блоков дискретного интегрирования с шагом Ts секунд, интегрирование завершают в момент времени Тк, полученные в результате дискретного интегрирования оценки выходных сигналов  , j=1, …, k; l=1, …, n регистрируют, фиксируют число m рассматриваемых одиночных дефектов блоков, определяют интегральные оценки сигналов модели для каждой из k контрольных точек и n параметров дискретного интегрирования, полученные в результате пробных отклонений параметров каждого из m блоков, для чего поочередно для каждого блока дискретной динамической системы вводят пробное отклонение параметра его дискретной передаточной функции и находят интегральные оценки выходных сигналов системы для n параметров дискретных интегральных преобразований αl и тестового сигнала x(t), полученные в результате дискретного интегрирования оценки выходных сигналов для каждой из k контрольных точек, каждого из m пробных отклонений и каждого из n параметров дискретного интегрирования
, j=1, …, k; l=1, …, n регистрируют, фиксируют число m рассматриваемых одиночных дефектов блоков, определяют интегральные оценки сигналов модели для каждой из k контрольных точек и n параметров дискретного интегрирования, полученные в результате пробных отклонений параметров каждого из m блоков, для чего поочередно для каждого блока дискретной динамической системы вводят пробное отклонение параметра его дискретной передаточной функции и находят интегральные оценки выходных сигналов системы для n параметров дискретных интегральных преобразований αl и тестового сигнала x(t), полученные в результате дискретного интегрирования оценки выходных сигналов для каждой из k контрольных точек, каждого из m пробных отклонений и каждого из n параметров дискретного интегрирования  , j=1, …, k; i=1, …, m; l=1, …, n регистрируют, определяют отклонения интегральных оценок сигналов дискретной модели, полученных в результате пробных отклонений параметров соответствующих структурных блоков
, j=1, …, k; i=1, …, m; l=1, …, n регистрируют, определяют отклонения интегральных оценок сигналов дискретной модели, полученных в результате пробных отклонений параметров соответствующих структурных блоков  , j=1, …, k; i=1, …, m; l=1, …, n определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученных в результате пробных отклонений параметров соответствующих блоков для n параметров дискретного интегрирования из соотношения
, j=1, …, k; i=1, …, m; l=1, …, n определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученных в результате пробных отклонений параметров соответствующих блоков для n параметров дискретного интегрирования из соотношения
замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал x(t), определяют интегральные оценки сигналов контролируемой дискретной системы для k контрольных точек и для n параметров дискретного интегрирования αl: Fj(αl), j=1, …, k; l=1, …, n определяют отклонения интегральных оценок сигналов контролируемой дискретной системы для k контрольных точек и n параметров дискретного интегрирования от номинальных значений ΔFj(αl)=Fj(αl)-Fj ном(αl), j=1, …, k; l=1, …, n, определяют нормированные значения отклонений интегральных оценок дискретной системы для n параметров дискретного интегрирования из соотношения
определяют диагностические признаки при n параметрах дискретного интегрирования из соотношения

по минимуму значения диагностического признака определяют неисправный блок.
Таким образом, предлагаемый способ поиска неисправного блока сводится к выполнению следующих операций:
1. В качестве дискретной динамической системы рассматривают систему, например с дискретной интерполяцией нулевого порядка, с шагом дискретизации Ts, состоящую из произвольно соединенных динамических блоков, с количеством рассматриваемых одиночных дефектов блоков m.
2. Предварительно определяют время контроля ТК≥ТПП, где ТПП - время переходного процесса дискретной системы. Время переходного процесса оценивают для номинальных значений параметров динамической системы.
3. Определяют n параметров, кратных 5/Tk многократного интегрирования сигналов.
4. Фиксируют число контрольных точек k.
5. Предварительно определяют нормированные векторы  интегральных оценок отклонений сигналов дискретной модели, полученные в результате пробных отклонений параметров i-го блока каждого из m блоков и номинальных значений параметров передаточных функций остальных блоков и n определенных выше параметров αl, для чего выполняют пункты 6-10.
интегральных оценок отклонений сигналов дискретной модели, полученные в результате пробных отклонений параметров i-го блока каждого из m блоков и номинальных значений параметров передаточных функций остальных блоков и n определенных выше параметров αl, для чего выполняют пункты 6-10.
6. Подают тестовый сигнал (единичный ступенчатый, линейно возрастающий, прямоугольный импульсный и т.д.) на вход системы управления с номинальными характеристиками. Принципиальных ограничений на вид входного тестового воздействия предлагаемый способ не предусматривает.
7. Регистрируют реакцию системы fjном(t), j=1, 2, …, k на интервале t∈[1,N] с дискретным шагом Ts секунд на интервале наблюдения [0,Tk] (где Tk=Ts·N) в k контрольных точках и определяют дискретные интегральные оценки выходных сигналов  , j=1, …, k; l=1, …, n дискретной системы. Для этого в момент подачи тестового сигнала на вход системы управления с номинальными характеристиками одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд в каждой из k контрольных точек и n параметрах αl с дискретными весами
, j=1, …, k; l=1, …, n дискретной системы. Для этого в момент подачи тестового сигнала на вход системы управления с номинальными характеристиками одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд в каждой из k контрольных точек и n параметрах αl с дискретными весами  , для чего сигналы системы управления подают на первые входы k·n блоков перемножения, на вторые входы блоков перемножения подают дискретные экспоненциальные сигналы
, для чего сигналы системы управления подают на первые входы k·n блоков перемножения, на вторые входы блоков перемножения подают дискретные экспоненциальные сигналы  с шагом Ts секунд, выходные сигналы k·n блоков перемножения подают на входы k·n блоков дискретного интегрирования с шагом Ts секунд, дискретное интегрирование завершают в момент времени Тк, полученные в результате дискретного интегрирования оценки выходных сигналов Fjном(αl), j=1, …, k; l=1, …, n регистрируют.
с шагом Ts секунд, выходные сигналы k·n блоков перемножения подают на входы k·n блоков дискретного интегрирования с шагом Ts секунд, дискретное интегрирование завершают в момент времени Тк, полученные в результате дискретного интегрирования оценки выходных сигналов Fjном(αl), j=1, …, k; l=1, …, n регистрируют.
8. Определяют интегральные оценки сигналов дискретной модели для каждой из k контрольных точек и каждого из n значений параметра дискретного интегрирования αl, полученные в результате пробных отклонений параметров каждого из m блоков, для чего поочередно для каждого блока дискретной динамической системы вводят пробное отклонение параметра дискретной передаточной функции и выполняют пункт 7 для одного и того же тестового сигнала. Полученные в результате дискретного интегрирования оценки выходных сигналов для каждой из k контрольных точек, каждого из m пробных отклонений и каждого из n параметров дискретного интегрирования  , j=1, …, k; i=1, …, l=1, …, n регистрируют.
, j=1, …, k; i=1, …, l=1, …, n регистрируют.
9. Определяют отклонения интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров соответствующих блоков ΔPji(αl)=Pji(αl)-Fjном(αl), j=1, …, k; i=1, …, m; l=1, …, n.
10. Определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров соответствующих блоков по формуле:
 , j=1, …, k; i=1, …, m; l=1, …, n.
, j=1, …, k; i=1, …, m; l=1, …, n.
11. Замещают систему с номинальными характеристиками контролируемой. На вход системы подают аналогичный тестовый сигнал.
12. Определяют интегральные оценки сигналов контролируемой дискретной системы для k контрольных точек и n параметров интегрирования  , j=1, …, k; l=1, …, n, осуществляя операции, описанные в пунктах 6 и 7 применительно к контролируемой системе.
, j=1, …, k; l=1, …, n, осуществляя операции, описанные в пунктах 6 и 7 применительно к контролируемой системе.
13. Определяют отклонения интегральных оценок сигналов контролируемой дискретной системы для k контрольных точек и n параметров интегрирования от номинальных значений ΔFj(αl)=Fj(αl)-Fjном(αl), j=1, …, k; l=1, …, n.
14. Вычисляют нормированные значения отклонений интегральных оценок сигналов контролируемой дискретной системы по формуле:
 , j=1, …, k; l=1, …, n.
, j=1, …, k; l=1, …, n.
15. Вычисляют диагностические признаки наличия неисправного блока (при n параметрах интегрирования) по формуле (3).
16. По минимуму значения диагностического признака определяют дефектный блок.
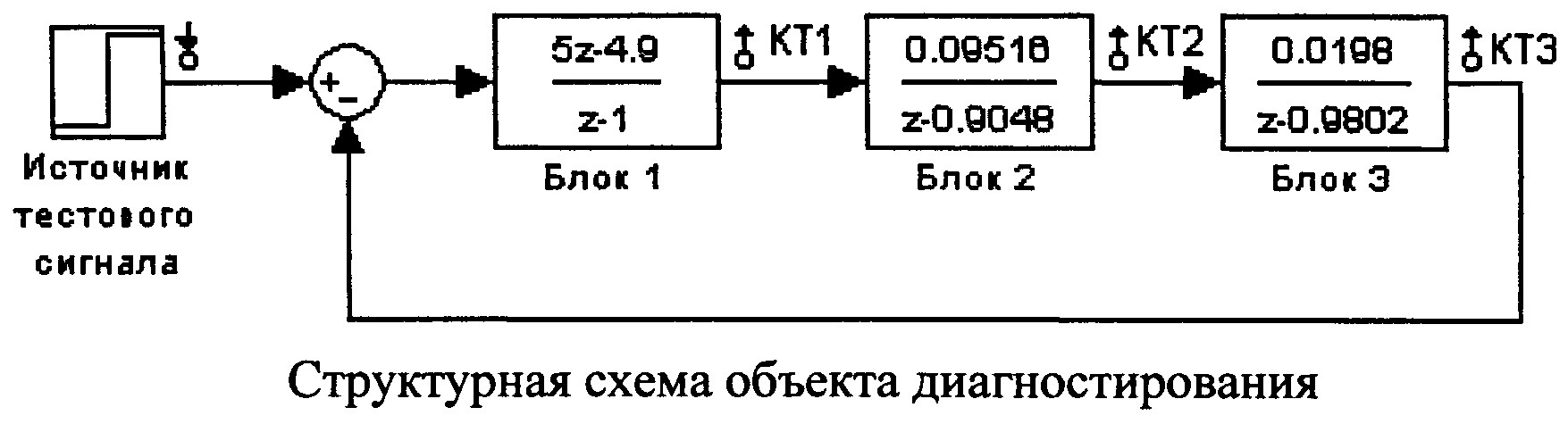
Рассмотрим реализацию предлагаемого способа поиска дефекта для дискретной системы, структурная схема которой представлена на рисунке (см. фиг. Структурная схема объекта диагностирования).
Дискретные передаточные функции блоков:
 ;
;  ;
;  ,
,
номинальные значения параметров: K1=5; Z1=0.98; К2=0.09516; Q2=0.9048; К3=0.0198; Q3=0.9802. При поиске одиночного структурного дефекта в виде отклонения коэффициента усиления на 20% (k1=4) в первом звене, при подаче ступенчатого тестового входного сигнала единичной амплитуды и интегральных оценок сигналов для параметров α1=0.5, α2=0.1, α3=2.5 и Тк=10 с, при использовании трех контрольных точек, расположенных на выходах блоков, используя пробные отклонения величиной 10%, получены значения диагностических признаков по формуле (3): J1=0.2511; J2=0.9382; J3=0.5738. Анализ значений диагностических признаков показывает, что дефект в первом блоке контролируемой системы находится правильно. Следует отметить, что способ работоспособен и при больших значениях величин пробных отклонений параметров (10-40%). Ограничением на величину пробного отклонения является необходимость сохранения устойчивости моделей с пробными отклонениями.
Моделирование процессов поиска дефектов в первом блоке (в виде уменьшения параметра k1 на 20%) приводит к вычислению диагностических признаков при трех параметрах интегрирования (α1=0.5, α2=0.1 и α3=2.5) по формуле (3): J1=0, J2=0.8254, J3=0.0898. Различимость дефекта: ΔJ=J3-J1=0.0898.
Для сравнения приведем диагностические признаки наличия неисправного блока (в виде уменьшения параметра k1 на 20%) при одном параметре интегрирования α=0.5: J1=0; J2=0.7843; J3=0.0717. Различимость дефекта ΔJ=J3-J1=0.0717.
Приведенные результаты показывают, что фактическая различимость нахождения дефектов этим способом выше, следовательно, выше будет и помехоустойчивость способа.
Моделирование процессов поиска дефектов во втором и третьем блоках для данного объекта диагностирования, при тех же параметрах интегрирования α и при единичном ступенчатом входном сигнале дает следующие значения диагностических признаков:
Моделирование процессов поиска дефектов во втором блоке (в виде уменьшения параметра k2 на 20%) приводит к вычислению диагностических признаков при трех параметрах интегрирования (α1=0.5, α2=0.1 и α3=2.5) по формуле (3): J1=0.8387; J2=0; J3=0.7703. Различимость дефекта: ΔJ=J3-J1=0.7703.
Для сравнения приведем диагностические признаки наличия неисправного блока (в виде уменьшения параметра k2 на 20%) при одном параметре интегрирования α=0.5: J1=0.7845; J2=0; J3=0.7481. Различимость дефекта ΔJ=J3-J1=0.7481.
Моделирование процессов поиска дефектов в третьем блоке (в виде уменьшения параметра k3 на 20%) приводит к вычислению диагностических признаков при трех параметрах интегрирования (α1=0.5, α2=0.1 и α3=2.5) по формуле (3): J1=0.09889; J2=0,7714; J3=0. Различимость дефекта: ΔJ=J3-J1=0.09889.
Для сравнения приведем диагностические признаки наличия неисправного блока (в виде уменьшения параметра k3 на 20%) при одном параметре интегрирования α=0.5: J1=0.07173; J2=0.7481; J3=0. Различимость дефекта ΔJ=J3-J-=0.07173.
Минимальное значение диагностического признака во всех случаях правильно указывает на дефектный блок.
Таким образом, все три дефекта находятся лучше при использовании заявляемого способа.
Способ поиска неисправного блока в дискретной динамической системе, основанный на том, что фиксируют число m блоков, входящих в состав системы, определяют время контроля Т≥Т, определяют параметр интегрального преобразования сигналов из соотношения , используют тестовый сигнал на интервале [0,Т], в качестве динамических характеристик системы используют интегральные оценки, полученные для вещественных значений α переменной Лапласа, фиксируют число k контрольных точек системы, предварительно регистрируют реакцию заведомо исправной дискретной во времени системы f(t), j=1, 2, …, k для N дискретных тактов диагностирования t∈[1,N] с дискретным постоянным шагом Ts на интервале наблюдения [0,T] (где T=T·N) в k контрольных точках, определяют интегральные оценки выходных сигналов F(α), j=1, …, k дискретной системы, для чего в момент подачи тестового сигнала на вход дискретной системы с номинальными характеристиками одновременно начинают дискретное интегрирование сигналов системы управления с шагом Ts секунд в каждой из k контрольных точек с дискретными весами с шагом Ts секунд, где , путем подачи на первые входы k блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают дискретный экспоненциальный сигнал с шагом Ts секунд, выходные сигналы k блоков перемножения подают на входы k блоков дискретного интегрирования с шагом Ts секунд, дискретное интегрирование завершают в момент времени Т, полученные в результате интегрирования оценки выходных сигналов , j=1,…, kрегистрируют, определяют интегральные оценки сигналов модели для каждой из k контрольных точек, полученных в результате пробных отклонений для m одиночных дефектов блоков, для чего поочередно в каждый блок дискретной динамической системы вводят пробное отклонение параметра дискретной передаточной функции и находят интегральные оценки выходных сигналов системы для параметра дискретного интегрального преобразования α и тестового сигнала x(t), полученные в результате дискретного интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждого из m пробных отклонений , j=1,…k; i=1, …, m регистрируют, определяют отклонения интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров соответствующих блоков ΔP(α)=P(α)-F(α), j=1, …k; i=1…, m, определяют нормированные значения отклонений интегральных оценок сигналов дискретной модели, полученные в результате пробных отклонений параметров соответствующих блоков по формуле , j=1, …,k; i=1, …, m, замещают систему сноминальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал, определяют интегральные оценки сигналов контролируемой дискретной системы для k контрольных точек , j=1, …, k, осуществляя операции, описанные ранее применительно к контролируемой системе, определяют отклонения интегральных оценок сигналов контролируемой дискретной системы для k контрольных точек от номинальных значений ΔF(α)=F(α)-F(α), j=1, …, k, вычисляют нормированные значения отклонений интегральных оценок сигналов контролируемой дискретной системы по формуле , j=1, …,k, определяют диагностические признаки, по минимуму диагностического признака определяют дефект, отличающийся тем, что определяют n параметров интегрирования сигналов, кратные , в качестве динамических характеристик системы используют интегральные оценки, полученные для n вещественных значений α, и определяют интегральные оценки выходных сигналов F(α), j=1, …, k; l=1, …, n системы, для чего в момент подачи тестового сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование сигналов системы управления в каждой из k контрольных точек для n параметров интегрирования с весами , l=1, …, n, путем подачи на первые входы k·n блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальные сигналы , l=1, …, n выходные сигналыk·n блоков перемножения подают на входы k·n блоков интегрирования, интегрирование завершают в момент времени Т, полученные в результате интегрирования оценки выходных сигналов , j=1,…, k; l=1, …, n регистрируют, определяют интегральные оценки сигналов модели для каждой из k контрольных точек и n параметров интегрирования, полученные в результате пробных отклонений параметров каждого из m блоков, для чего поочередно для каждого блока динамической модели вводят пробное отклонение параметра его передаточной функции и находят интегральные оценки выходных сигналов модели для n параметров α и тестового сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек, каждого из m пробных отклонений и каждого из n параметров интегрирования , j=1,…k; i=1, …, m; l=1, …, n регистрируют, определяют отклонения интегральных оценок сигналов модели, полученные в результате пробных отклонений параметров соответствующих блоков ΔP(α)=P(α)-F(α), j=1, …, k; i=1, …, m; l=1, …, n, определяют нормированные значения отклонений интегральных оценок сигналов модели, полученные в результате пробных отклонений параметров соответствующих блоков из соотношения , определяют интегральные оценки сигналов контролируемой системы для k контрольных точек и n параметров интегрирования , j=1, …, k; l=1, …, n, определяют отклонения интегральных оценок сигналов контролируемой системы для k контрольных точек и n параметров интегрирования от номинальных значений ΔF(α)=F(α)-F(α), j=1, …, k; l=1, …, n, определяют нормированные значения отклонений интегральных оценок сигналов контролируемой системы из соотношения , определяют диагностические признаки из соотношения , i=1, …, m, по минимуму диагностического признака определяют неисправный блок.




Способ поиска неисправного блока в дискретной динамической системе на основе смены позиции входного сигнала
Способ поиска неисправностей динамического блока в непрерывной системе на основе функции чувствительности
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Способ поиска топологического дефекта в непрерывной динамической системе на основе функции чувствительности
Способ поиска неисправного блока в непрерывной динамической системе на основе введения пробных отклонений
Способ поиска топологического дефекта в дискретной динамической системе на основе введения пробных отклонений
Способ поиска топологического дефекта в непрерывной динамической системе на основе введения пробных отклонений
Способ поиска топологического дефекта в непрерывной динамической системе на основе введения пробных отклонений
Дробилка для зерна
Способ разработки лесосек с использованием воздушно-транспортной установки
Способ выгрузки грузов на обочину, откос или территорию вблизи железнодорожного пути и устройство для его осуществления
Способ заготовки древесных ресурсов
Способ биологической доочистки сточных вод и система для его осуществления
Радиально-осевой подшипник скольжения
Способ поиска неисправных блоков в дискретной динамической системе
Способ поиска неисправного блока в дискретной динамической системе
Кровать для беременных женщин
Рабочее оборудование гидравлического экскаватора
Водоочиститель

