Результат интеллектуальной деятельности: СПОСОБ ПОДАВЛЕНИЯ ЛОЖНОГО СИГНАЛА В ИЗМЕРИТЕЛЕ УГЛОВОЙ СКОРОСТИ С МИКРОМЕХАНИЧЕСКИМИ ГИРОСКОПАМИ
Вид РИД
Изобретение
Изобретение относится к области микромеханики, в частности к микромеханическим гироскопам (ММГ) вибрационного типа.
Инерциальные микромеханические датчики имеют малые размеры, низкую потребляемую мощность, малый вес и низкую стоимость. Поэтому они находят все большее применение, в том числе и в тех областях, которые требуют от датчиков сохранения своей точности при значительных вибрациях и ударах. К таким областям можно отнести автомобильный транспорт, ракетную технику, бортовую аппаратуру летательных аппаратов и т.д.
Однако при работе в таких условиях на выходе ММГ, как отмечается в работе T.P.Singh et al ((Analysis of Acceleration Sensitivity in MEMS Tuning Fork Gyroscope» Transducers′ 11, Beijing, China, June 2011, pp.5-9, может появляться ложный (false) сигнал.
В другой работе (R.N. Dean et al «А Characterization of the Performance of a MEMS Gyroscope in Acoustically Harsh Environments)), IEEE transaction on Industrial Electronics, vol.58, №7, July 2011, pp.2591-2595) экспериментально показано, что на выходе ММГ ADXRS300 может появляться ложный сигнал в виде низкочастотного синусоидального сигнала, амплитуда которого пропорциональна воздействующему на датчик акустического сигнала частотой, близкой к частоте первичных колебаний.
В работе (Евстифеев М.И. и др. «Результаты испытаний микромеханических гироскопов при механических воздействиях», Гироскопия и навигация. - 2011. - №1. - С.49-58) было показано, что при отсутствии угловой скорости на выходе ММГ RR-типа с разомкнутым контуром вторичных колебаний появляется сигнал значительного уровня при действии вибраций в определенных частотных диапазонах.
Экспериментальные исследования работы компенсационного ММГ RR-типа при действии вибраций показали, что ложный сигнал на его выходе появляется тогда, когда частота вибраций основания (fв) становится равной или близкой к частоте субгармоник первичных колебаний f1/N (f1 - частота первичных колебаний подвижной массы ММГ, N-целое число).
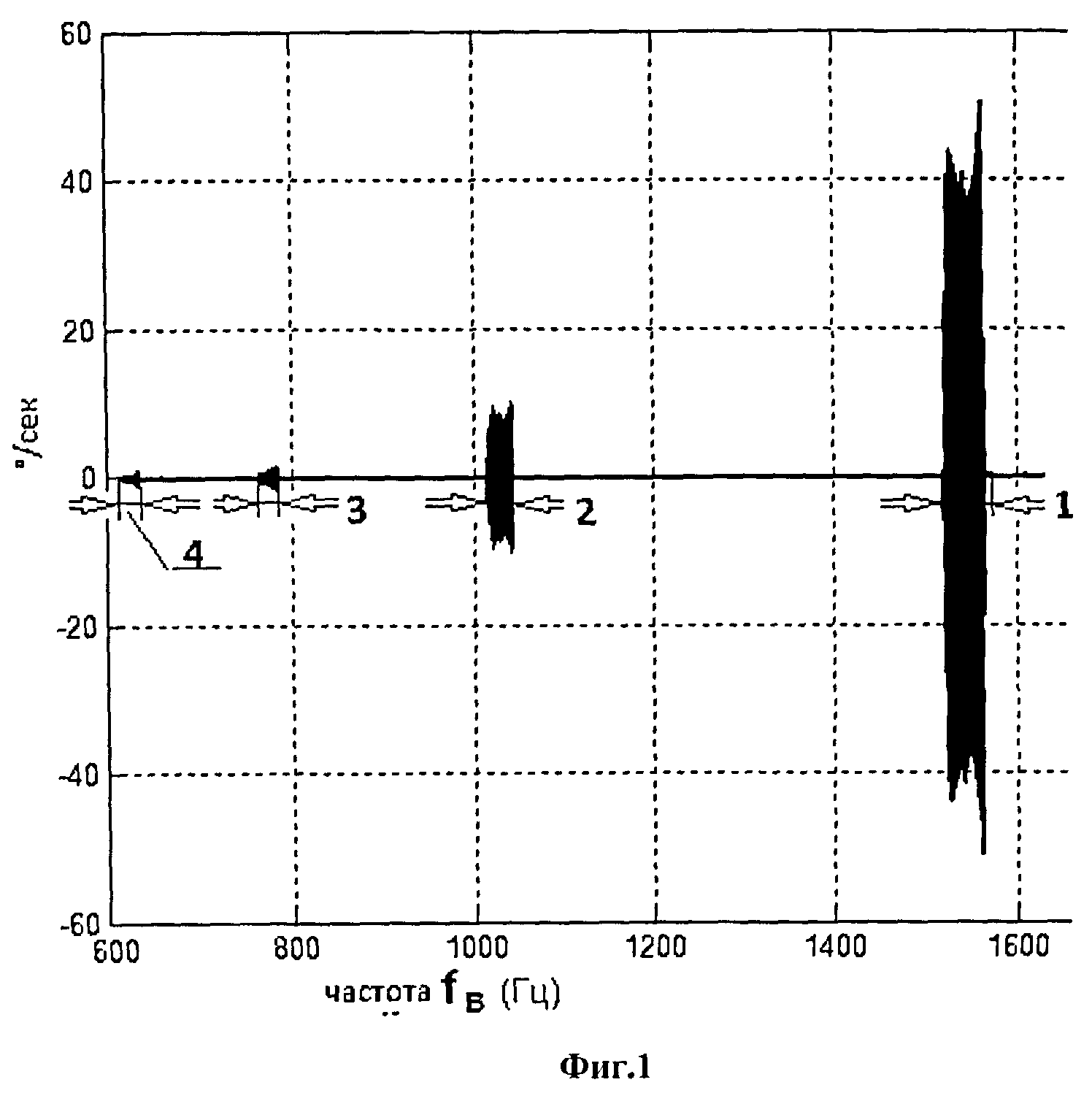
На фиг.1 приведена осциллограмма выходного сигнала ММГ компенсационного ММГ RR-типа при действии вибраций вдоль оси первичных колебаний с амплитудой 10g при медленном (со скоростью 0,5 Гц/сек) нарастании частоты fв. У этого ММГ частота f1 была равна 3084 Гц. Частоты второй, третьей, четвертой и пятой субгармоник соответственно равны 1542, 1028, 771 и 615 Гц.
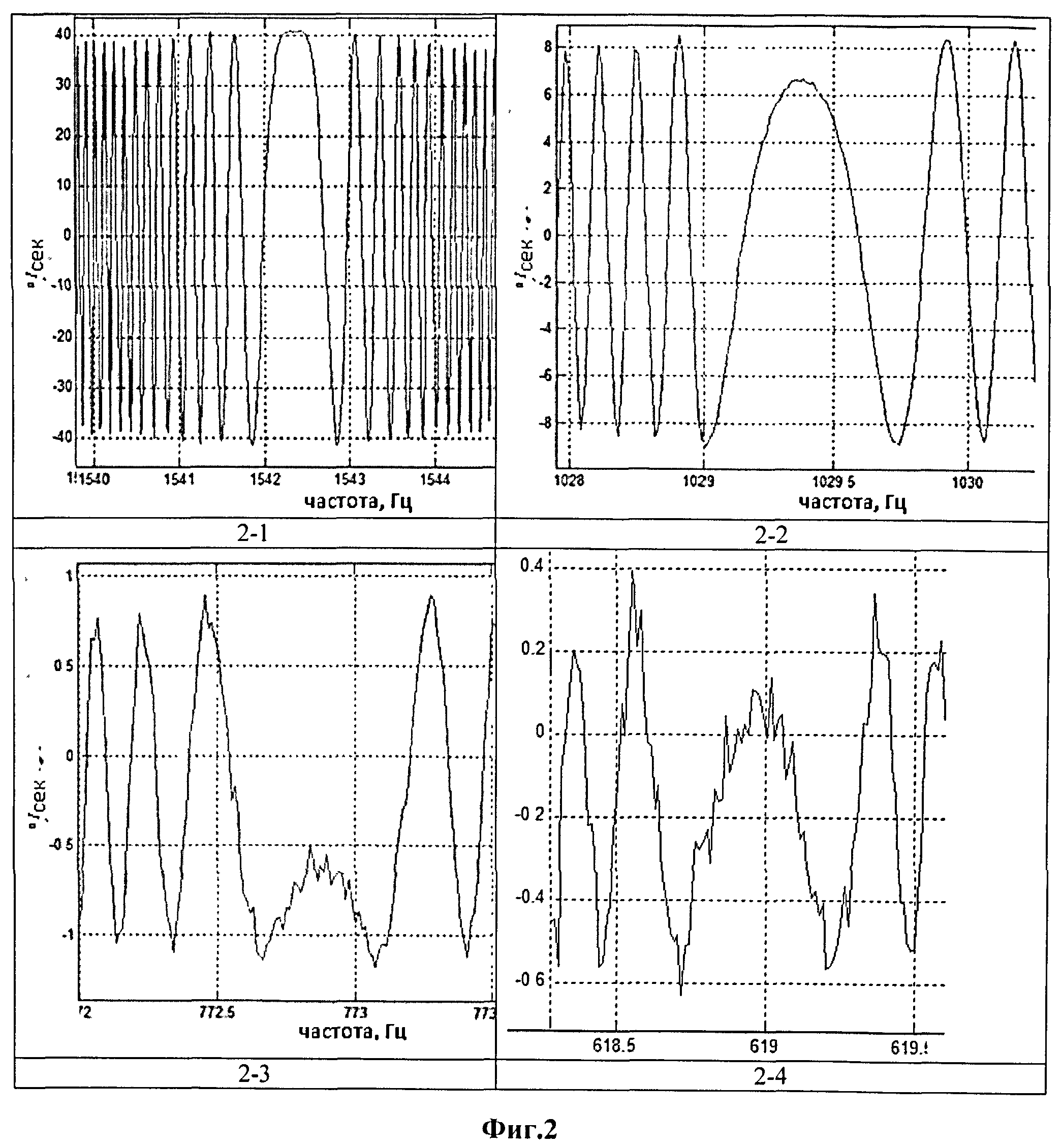
На фиг.2 показаны участки графика, приведенного на фиг.1 с увеличением масштаба по оси абсцисс. Сопоставляя фиг.1, 2, можно заметить, что протяженность участков, где появляется ложный сигнал, не велика и не превосходит 50 Гц, при этом протяженность этих участков с увеличением номера субгармоники уменьшается, низкочастотный сигнал появляется на частоте субгармоники и его частота возрастает при увеличении разности |fв-f1/N|, амплитуда сигнала падает при возрастании числа N. Другими словами, чем ниже частота субгармоники, тем меньше амплитуда ложного сигнала.
Используются разные способы подавления ложного сигнала в ММГ.
Одним из них является повышение частоты первичных колебаний f1 или резонансной частоты подвеса по оси первичных колебаний. Можно выбрать f1 так, что частоты первых субгармоник, при совпадении частот вибраций, с которыми ложный сигнал имеет большую амплитуду, будут находиться вне частотной области действия вибраций. Например, при f1>15 кГц в диапазон вибраций, равный 3 кГц, попадут субгармоники, соответствующие N>5.
Однако повышение f1 приводит к снижению разрешающей способности микромеханического чувствительного элемента (ЧЭ) ММГ (см. выражение (4) на стр.1653 работы N. YAZDI et al, Micromachined Inertial Sensors, PROCEEDINGS OF THE IEEE, VOL.86, NO.8, AUGUST 1998, pp. 1640-1659).
Другим способом подавления ложного сигнала является установка ММГ на основании через виброзащитные устройства или амортизаторы.
Пути построения таких амортизаторов рассмотрены в работе Sang Won Yoon «Vibration Isolation and Shock Protection for MEMS» A PHD dissertation, The University of Michigan, 2009, 208pp. Примеры амортизаторов для микроэлектромеханических систем (МЭМС) приведены в патенте РФ №2358166 и в работе: Mezentsev O. et al «Towards Volume Medium-Accuracy MEMS Gyro Manufacturing: Challenges and Solutions", Proceedings of IEEE/ION PLANS, 2010, pp.617-620 (Fig.5), а также в статье S.W. Yoon et al, Analysis and wafer-level design of a high-order silicon vibration isolator for resonating MEMS devices. J. Micromech. Microeng. 21 (2011) 015017 (11 pp).
Недостатком этого способа является значительное увеличение габаритов датчика и его стоимости.
Ложный сигнал на выходе ММГ может рассматриваться как аддитивная помеха. Большой уровень помехи может рассматриваться как отказ датчика.
Использование избыточного числа датчиков, например, ММГ в измерителе угловой скорости и последующее преобразование выходных сигналов по определенному алгоритму позволяет исключить сигнал отказавшего датчика или отключить его.
Понятия «избыточность датчиков», «резервирование», «дублирование», «кратность резервирования» разъясняются в Большой Советской Энциклопедии (БСЭ): (см. БСЭ, т.8, стр.521. - М., "Советская энциклопедия", 1972 г), (см. БСЭ, т.21, стр.580, М., "Советская энциклопедия", 1975 г, в учебной литературе, например, в: Матвеевский В.Р. Надежность технических систем. Учебное пособие. М., Московский государственный институт электроники и математики. 2002 г., 113 стр.
В учебном пособии Матвеевского (стр.105-106, фиг.6.7б) описан алгоритм мажоритарного резервирования элементов.
Пример реализации такого алгоритма приведен в патенте РФ №2110835. Известны и другие примеры устройств, реализующих операцию или алгоритм мажоритарного выбора.
В патенте США №6882964 описан «виртуальный датчик», образованный несколькими датчиками (ММГ) с параллельно расположенными осями чувствительности, выходные сигналы которых с помощью дополнительных узлов объединяются по определенному алгоритму (см. фиг.2 этого патента).
В определенной степени в этом патенте также решается задача исключения или, точнее, уменьшения ложного аддитивного сигнала, под которым понимаются дрейф нуля и шум, присутствующие на выходе каждого ММГ. На выходе измерителя угловой скорости величины дрейфа нуля и плотности шума оказываются меньше, чем на выходах ММГ, за счет использования алгоритма преобразования сигналов, заключающегося в фильтрации с помощью фильтра Калмана.
Недостатком такого алгоритма является то, что он не позволяет исключить или значительно уменьшить ложные сигналы, носящие детерминированный характер и обусловленные вибрациями.
Отметим, что простое применение алгоритма мажоритарного выбора при избыточном числе идентичных ММГ не обеспечивает подавления ложного сигнала, т.к. технологический разброс по величине частоты f1 у разных ММГ может оказаться в пределах, упомянутых выше 50 Гц.
В качестве прототипа выбран способ подавления ложного сигнала в измерителе угловой скорости по патенту США №6882964, в котором угловая скорость измеряется с помощью избыточного числа вибрационных ММГ с параллельно расположенными осями чувствительности и последующим выделением выходного сигнала путем преобразования сигналов ММГ по определенному алгоритму.
Недостатки такого прототипа рассмотрены выше: выбранный способ-прототип не исключает появления ложного сигнала на выходе устройства измерения угловой скорости при действии вибраций в тех случаях, когда частота вибраций основания оказывается близкой к частоте субгармоник первичных колебаний.
Задачей изобретения является повышение точности и надежности измерителя угловой скорости, построенного на основе нескольких однотипных ММГ, при работе этого измерителя при действии значительных вибрационных воздействий.
Решение поставленной задачи достигается тем, что для измерителя угловой скорости вибрационные ММГ выбираются с разными резонансными частотами подвеса инерционной массы, а в качестве алгоритма преобразования сигналов ММГ используется алгоритм мажоритарного выбора.
Кроме того, поставленная задача достигается тем, что в случае, если число избыточных гироскопов равно двум, резонансные частоты их подвесов выбираются таким образом, что они отличаются одна от другой не менее чем на 10%.
Предлагаемый способ заключается в следующем: однотипные ММГ, которые являются в измерителе угловой скорости резервируемыми датчиками, выбираются таким образом, чтобы они имели разные резонансные частоты подвеса, а выходной сигнал одного из резервируемых датчиков выбирается в качестве выходного путем мажоритарного выбора.
Для того чтобы ложные сигналы при действии вибраций на одной частоте не возникали одновременно на выходе двух и более ММГ, их резонансные частоты подвеса инерционной массы по оси первичных колебаний выбираются таким образом, что отличаются одна от другой не менее чем на 10%.
По существу, предлагаемый способ за счет избыточного числа ММГ, обладающих разной реакцией на действие вибраций, а также использования алгоритма мажоритарного выбора, обеспечивает выбор в качестве рабочего ММГ того, у которого при действующих вибрациях отсутствует ложный сигнал на выходе. При изменении характеристик вибрационного воздействия, при которых, например, на выходе рабочего ММГ может появиться ложный сигнал, предлагаемый способ обеспечивает выбор в качестве рабочего другой ММГ.
Для того чтобы ложные сигналы при действии вибраций на одной частоте не возникали одновременно на выходе двух ММГ RR-типа, у которых вибрации приводят к появлению ложного сигнала при частотах вибраций, близких к субгармоникам частоты первичных колебаний вплоть до пятой (f1/5), ММГ должны иметь резонансные частоты подвесов инерционной массы по оси первичных колебаний, отличающиеся одна от другой не менее чем на 10%.
Заявленный способ поясняется чертежами.
На фиг.1 приведены зависимости выходного сигнала ММГ компенсационного ММГ RR-типа от частоты вибраций при действии вибраций вдоль оси первичных колебаний с амплитудой 10g при медленном (со скоростью 0,5 Гц/сек) нарастании частоты fв.
Участки, соответствующие частотам вибрации, на которых на выходе ММГ появляются ложные сигналы, обозначены 1, 2, 3, 4.
На фиг.2 показаны участки 1-4 графика, приведенного на фиг.1 с увеличением масштаба по оси абсцисс. Участкам 1-4, изображенным на фиг.1, соответствуют на фиг.2 графики с обозначениями 2-1, 2-2, 2-3 и 2-4 соответственно.
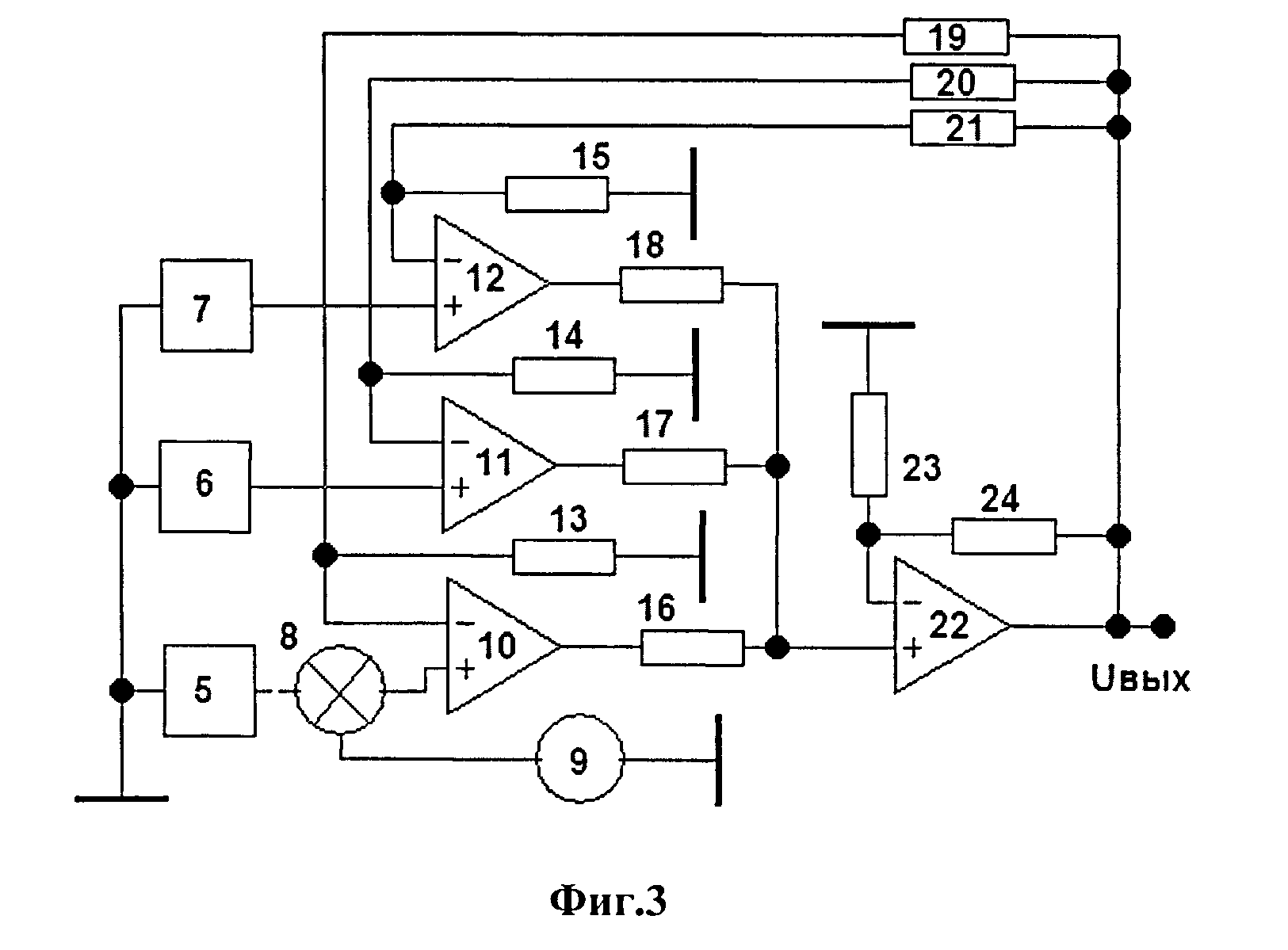
На фиг.3 приведена блок-схема измерителя угловой скорости с тремя ММГ, два из которых являются избыточными, в котором реализован предложенный способ измерения угловой скорости.
На фиг.3. обозначены: 5, 6, 7 - соответственно первый, второй и третий ММГ, входящие в измеритель угловой скорости, 8 - устройство суммирования, 9 - источник сигнала, 10-12 - соответственно первый, второй и третий операционные усилители (ОУ), 13-21 - резисторы, 22 - четвертый ОУ, 23, 24 - резисторы.
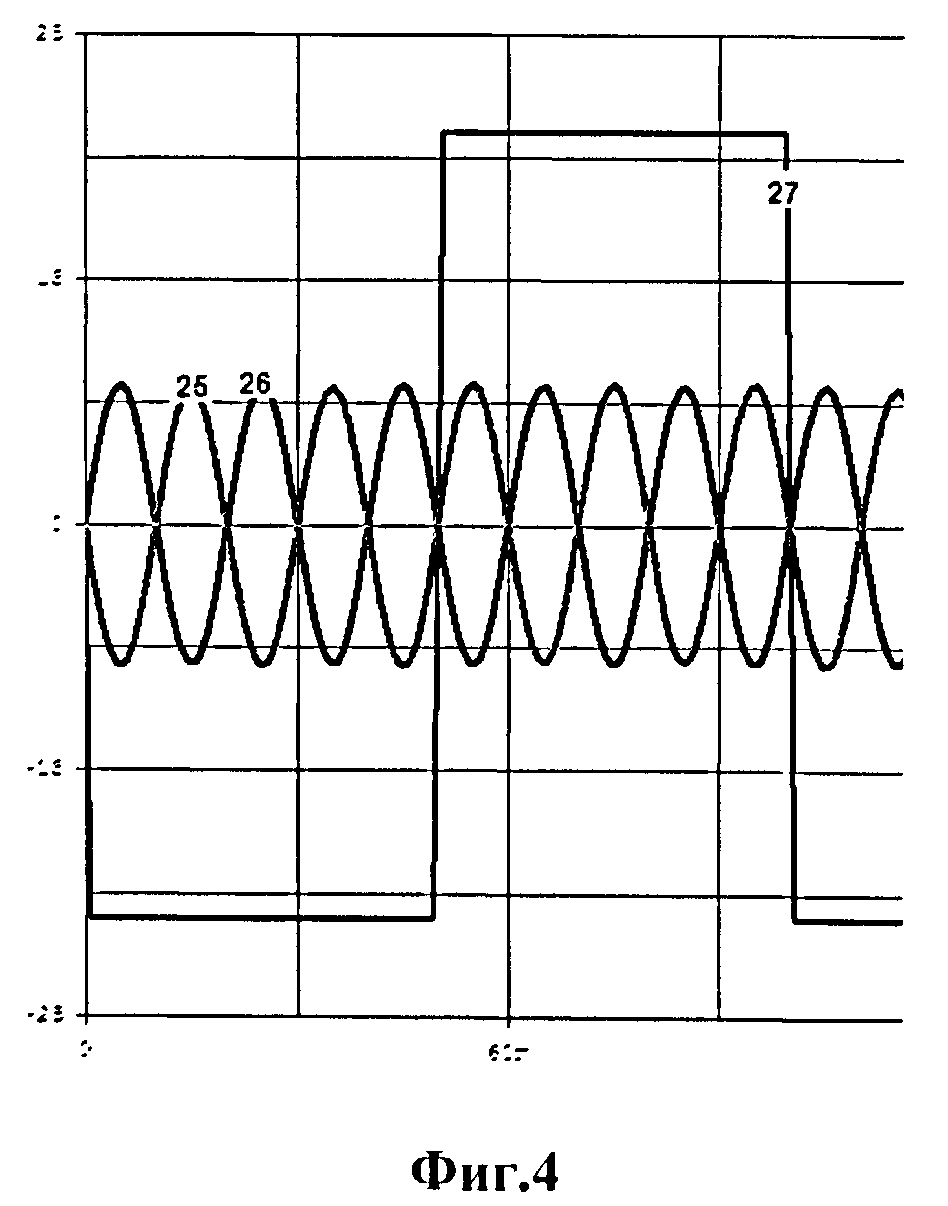
На фиг.4 показаны следующие сигналы:
25 - измеряемая угловая скорость Ώ, 26 - выходной сигнал измерителя угловой скорости, 27 - сигнал на выходе ОУ 10.
График, приведенный на фиг.1, получен при проведении испытаний ММГ на вибрационном стенде. Поскольку частота вибраций изменялась во времени линейно, зависимость выходного сигнала ММГ может быть перестроена и интерпретирована как функция от времени. На этом графике выделены четыре участка (1-4), на которых появляется ложный сигнал. Этот сигнал появляется тогда, когда частота вибраций становится близка к частотам субгармоник частоты f1. На фиг.1 приведен график для ММГ, у которого частота f1 равна 3084 Гц. Участки 1-4 соответствуют частотам второй, третьей, четвертой и пятой субгармоник, которые равны 1542, 1028, 771 и 615 Гц соответственно. Испытания ММГ с разными частотами f1 показали, что и у них ложные сигналы появляются при частотах вибраций, близких к частотам субгармоник f1. Различие проявляется в амплитудах сигнала на выходе ММГ.
Дополнительно проводился эксперимент при действии вибраций на ММГ на фиксированной частоте. Они подтвердили: тот экспериментально установленный факт, что частота ложного сигнала оказывается тем ниже, чем ближе частота вибраций к частоте субгармоники. В этих экспериментах можно было получить ложный сигнал, форма которого была близка к синусоидальной, а частота была ниже 1 Гц.
Части участков 1-4 для наглядности приведены на фиг.2 в увеличенном масштабе по оси абсцисс.
Сопоставляя фиг.1, 2 можно заметить, что протяженность участков, где появляется ложный сигнал, не велика и составляет примерно 50 Гц, низкочастотный сигнал появляется на частоте субгармоники, и его частота возрастает при увеличении разности |fв-f1/N|, амплитуда сигнала падает при возрастании числа N. Другими словами, чем ниже частота субгармоники, тем меньше амплитуда ложного сигнала. Отметим, что и протяженность участков с увеличением N уменьшается.
В зависимости от конструкции ММГ, систем управления движением его инерционной массы, параметров ЧЭ протяженность участков (Δf), на которых появляется ложный сигнал, номера субгармоник (число N) могут меняться. Отметим, что здесь принято, что эти участки расположены симметрично относительно субгармоник.
Фиг.2 позволяет увидеть, что ложный сигнал является сигналом, близким к гармоническому, и его частотный диапазон включает и низкие частоты. Поэтому он не может быть подавлен за счет уменьшения полосы пропускания ММГ или использования фильтрации с помощью фильтра низких частот.
Однако, если частоты f1 выбрать разными, ложные сигналы на выходах разных ММГ будут появляться при разных частотах вибраций.
Для того чтобы при вибрациях на одной частоте не появлялся ложный сигнал одновременно на выходах двух ММГ, необходимо, чтобы разность их частот подвеса по оси первичных колебаний была больше или равна (Δf)N. Для случая, когда N≤5, Δf≤50 Гц (этот случай соответствует экспериментально полученным данным для компенсационного ММГ RR-типа) разность частот подвеса по оси первичных колебаний двух ММГ должна быть не меньше 250 Гц. Это при частоте f1≈3000 Гц соответствует 8,3%. В случае несимметричного расположения описанных участков относительно субгармоник допустимая величина разности частот подвеса по оси первичных колебаний двух ММГ может быть выбрана с запасом или она может быть уточнена таким образом, чтобы исключить возможность случая, когда участки с ложными сигналами разных ММГ имеют общие области.
ММГ отбираются так, что резонансные частоты их подвесов по оси первичных колебаний различаются между собой, например, на 10% и более. В этом случае ни при одной частоте вибрации ложный сигнал не появится более чем на выходе одного ММГ RR-типа. Это экспериментально было исследовано и соответствует данным, приведенным на фиг.1, 2.
Способы промышленного изготовления ММГ с разными резонансными частотами описаны в литературе (см., например, патент WO 2004/072580. Method and systems for simultaneously fabricating multifrequency MEMS devices).
Для иллюстрации этого случая (полагая, что разность между частотами f1 составляет не менее 10% (300 Гц)) проведем расчет частот субгармоник и частот на участке 4.
|
Как видно из таблицы, даже для N=5 (участок 4), при выбранных значениях f1 нет перекрытия по частоте вибраций, при которой бы имело место появление ложного сигнала одновременно на выходе двух ММГ. Отметим, что поскольку участки 4 короче участков 1, 2, протяженность которых 50 Гц, значение запаса по перекрытию больше, чем это следует из таблицы (10 Гц).
Вариант измерителя угловой скорости с ММГ, в котором реализуется предлагаемый способ подавления ложного сигнала, приведен на фиг.3. На этой блок-схеме первый, второй и третий ММГ (элементы 5-7) подключены ко входам ОУ 10-12. При этом для наглядности показано, что первый ММГ 5 соединен со входом ОУ 10 через устройство суммирования 8, другой вход элемента 8 соединен с источником сигнала 9. Резисторы 13-15 соединены с общим проводом и неинвертирующими входами соответственно элементов 10-12, а выходы элементов 10-12 соединены со входом ОУ 22, выход которого через резисторы 19-21 соединен соответственно с резисторами 13-15. Выход ОУ 22 также соединен через резистор 24 с инвертирующим входом ОУ 22, который через резистор 23 соединен с общим проводом.
Устройство, реализующее заявленный способ, изображено на фиг.3. Устройство работает следующим образом:
Угловая скорость Ώ основания, на которое устанавливаются ММГ, измеряют с помощью ММГ 5-7, которые имеют аналоговый выход. При действии вибраций на основании при условии, например, когда частота вибраций находится в пределах одного из участков 1-4 для ММГ 5 на его выходе наряду с сигналом, пропорциональным Ώ, появляется ложный сигнал. Этот ложный сигнал является аддитивным гармоническим сигналом. Его появление имитируется сигналом источника 9. ОУ 10-15 имеют большой коэффициент усиления, а сигнал на выходе ОУ не может превышать определенный уровень, например, ±20 В. Выходные сигналы ОУ 10-12 суммируются на входе ОУ 22, этот суммарный сигнал после усиления поступает обратно на входы ОУ 10-12. Таким образом, ОУ 10-12 оказываются охваченными отрицательной обратной связью по суммарному сигналу всех ММГ.
Когда один из сигналов, поступающих на входы ОУ 10-12, отличается от других (а на фиг.3 это относится к сигналу, поступающему на вход ОУ 10), соответствующий ОУ переходит в режим насыщения, а другие ОУ парируют этот постоянный сигнал, который имеет место на выходе ОУ 10, и при этом остаются в линейной зоне, усиливая сигналы ММГ, у которых ложные сигналы отсутствуют.
Поэтому в сигнале на выходе ОУ 22 присутствует только сигнал пропорциональный Ώ. Таким образом, в блок-схеме на фиг.3 реализуется алгоритм мажоритарного выбора сигналов, при котором выделяются только совпадающие сигналы или сигнал, величина которого находится между двумя другими. Предложенный способ подавления ложного сигнала в измерителе угловой скорости может быть достигнут и в случае ММГ с цифровыми выходами. В этом случае для мажоритарного выбора необходимо использовать цифровое устройство.
На фиг.4 приведены результаты моделирования работы блок-схемы на фиг.3.
Здесь измеряемая угловая скорость Ώ (сигнал 25) - сигнал частоты 50 Гц, 26 - выходной сигнал измерителя угловой скорости (сигнал на выходе ОУ 22, он специально проинвертирован для наглядности), 27 - сигнал на выходе ОУ 10 при частоте сигнала 9, равной 10 Гц.
Видно, что ОУ 10, на вход которого поступает ложный сигнал, переключается из режима насыщения (-20 В) в режим насыщения (+20 В) с частотой ложного сигнала.
Другими словами, пара ММГ, у которых на выходе нет ложного сигнала, как бы блокирует прохождение сигнала от ММГ, на выходе которого ложный сигнал имеется.
Таким образом, предложенный способ, заключающийся в измерении угловой скорости с помощью избыточного числа ММГ с разными резонансными частотами подвеса инерционной массы и формировании из выходных сигналов ММГ выходного сигнала измерителя путем мажоритарного выбора, позволяет подавить ложные сигналы, которые могут возникать в ММГ при действии вибраций.
Это обеспечивает повышение надежности и точности измерителей угловой скорости на основе ММГ без снижения разрешающей способности последних даже в условиях, когда на устройство действуют значительные вибрации.
Способ оперативного прогноза землетрясений и устройство для его реализации
Способ распознавания ложных целей, вызванных собственными помехами подвижного носителя
Способ изготовления газодинамического подшипника поплавкового гироскопа
Способ передачи телеметрической информации с забоя шельфовой скважины на морскую платформу
Интегрированная инерциально-спутниковая система ориентации и навигации для морских объектов
Магнитный компас сферического типа
Способ оценки динамических характеристик датчиков угловой скорости
Способ определения погрешности двухстепенного поплавкового гироскопа
Совмещенное антенное устройство
Магнитный курсоуказатель для скоростных судов
Способ оперативного прогноза землетрясений и устройство для его реализации
Способ распознавания ложных целей, вызванных собственными помехами подвижного носителя
Способ изготовления газодинамического подшипника поплавкового гироскопа
Способ передачи телеметрической информации с забоя шельфовой скважины на морскую платформу
Интегрированная инерциально-спутниковая система ориентации и навигации для морских объектов
Магнитный компас сферического типа
Способ оценки динамических характеристик датчиков угловой скорости
Способ определения погрешности двухстепенного поплавкового гироскопа
Совмещенное антенное устройство
Магнитный курсоуказатель для скоростных судов

