Результат интеллектуальной деятельности: СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является увеличение точности наведения на цель.
Известен способ наведения вращающейся ракеты / Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М., «Высшая школа», 1976, с.237-238, рис.7.16/, включающий формирование излучения на пусковом устройстве, прием этого излучения на ракете, выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу γ крена ракеты гармоническими (синусоидальными) сигналами, их суммирование и преобразование в отклонение руля.
СН, реализующая этот способ, содержит источник излучения (ИИ) на пусковом устройстве, оптически связанный с ним приемник излучения (ПИ), формирователи сигналов управления в вертикальной (ФСУВ) и горизонтальной (ФСУГ) плоскостях, входы которых соединены с выходом ПИ, а выходы соединены с первыми входами соответственно первого и второго модуляторов, суммирующий усилитель (СУ), первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, гироскопический датчик угла крена (ГДУК), механически связанный с двумя синусно-косинусными вращающимися трансформаторами (СКВТ), выходы которых связаны со вторыми входами соответственно первого и второго модуляторов, и привод рулевого органа (ПРО), вход которого соединен с выходом СУ.
Сигнал управления V, поступающий на ПРО, согласно этому способу имеет вид:
V=hy cosγ+hz sinγ,
где hy, hz - сигналы управления в вертикальной и горизонтальной плоскостях соответственно.
Недостатком такого способа и реализующего его устройства является низкая надежность механических элементов - СКВТ и относительно большие их габариты.
Реализация точных синусоидальных модулирующих сигналов иным способом затруднительна, вследствие чего применяют устройства, в которых максимально упрощена механическая часть и усложнена электрическая (как правило, адаптированная к исполнению в цифровом виде).
Наиболее близким к предлагаемому способу, принятым в качестве прототипа, является способ наведения вращающейся ракеты /патент RU №2375667, МПК F41G 7/00 (2006.01), F42B 15/01 (2006.01) /, включающий формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, формирование периодических по углу крена ракеты релейных трехпозиционных сигналов С(γ) и S(γ), сдвинутых друг относительно друга на угол π/2, модуляцию сигналов управления в вертикальной и горизонтальной плоскостях сигналами С(γ) и S(γ) соответственно, суммирование промодулированных сигналов и преобразование полученного сигнала в отклонение рулевого органа.
СН вращающейся ракеты /патент RU №2375667, МПК F41G 7/00 (2006.01), F42B 15/01 (2006.01)/, реализующая этот способ, включает ИИ на пусковом устройстве, оптически связанный с ним ПИ, формирователи сигналов управления в вертикальной и горизонтальной плоскостях, входы которых соединены с выходом ПИ, а выходы соединены с первыми входами соответственно первого и второго модуляторов, СУ, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, ПРО и ГДУК, первый и второй выходы которого соединены соответственно со вторыми входами первого и второго модуляторов, причем сигналы с первого и второго выходов ГДУК являются релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2.
Релейные трехпозиционные модулирующие сигналы по этому способу обеспечивают четыре точных отсчета по углу крена за период вращения ракеты. Реализация таких сигналов возможна, например, с помощью бесконтактного ГДУК, включающего гироскоп, наружная рамка которого связана с экранирующей маской, две оптронные пары «светодиод - фотодиод», связанные с корпусом ракеты, и преобразователь полученных электрических двухпозиционных сигналов в трехпозиционные.
Известный способ и реализующая его СН широко применяются в дозвуковых ракетах с релейным двухпозиционным ПРО, осуществляющим перекладку руля с упора на упор при формировании релейного входного сигнала по принципу широтно-импульсной модуляции. В СН с релейным ПРО сигнал управления при этом линеаризуется (суммируется с сигналом линеаризации), а в СН с пропорциональным ПРО, угол отклонения руля которого в идеальном случае пропорционален входному сигналу, линеаризация отсутствует.
Сигнал управления V, поступающий на ПРО, формируется согласно этому способу по зависимости
V=hyC(γ)+hzS(γ).
Комплексная амплитуда  гармоник Vm разложения в ряд Фурье этого сигнала определяется выражением:
гармоник Vm разложения в ряд Фурье этого сигнала определяется выражением:
 ,
,
где  ;
;
m - номер гармоники;
 - проекции комплексной амплитуды
- проекции комплексной амплитуды  на оси декартовой системы координат.
на оси декартовой системы координат.
Проекции  комплексной амплитуды первой гармоники представляют собой результирующие команды управления в вертикальной и горизонтальной плоскостях, а все высшие гармоники являются «паразитными», которые могут увеличивать отклонения центра масс ракеты и ее колебания по углам атаки.
комплексной амплитуды первой гармоники представляют собой результирующие команды управления в вертикальной и горизонтальной плоскостях, а все высшие гармоники являются «паразитными», которые могут увеличивать отклонения центра масс ракеты и ее колебания по углам атаки.
В соответствии с разложением периодического сигнала в ряд Фурье / Бронштейн И.Н. и Семендяев К.А. Справочник по математике. - М.: Наука, 1967, с.549-556/ проекции  , нормированные по величине максимального угла отклонения руля δmax, при нулевом сигнале управления в горизонтальном канале (hz=0) имеют вид:
, нормированные по величине максимального угла отклонения руля δmax, при нулевом сигнале управления в горизонтальном канале (hz=0) имеют вид:
а) при гармонических модулирующих сигналах cosγ, sinγ:

где  - сигнал управления в вертикальной плоскости, нормированный по величине максимального угла отклонения руля;
- сигнал управления в вертикальной плоскости, нормированный по величине максимального угла отклонения руля;
 при m≥2 (все высшие гармоники отсутствуют);
при m≥2 (все высшие гармоники отсутствуют);
б) при трехпозиционных модулирующих сигналах С(γ), S(γ) прототипа:
Согласно приведенным зависимостям величина максимальной результирующей команды в вертикальной плоскости  в линейной зоне ее изменения составляет:
в линейной зоне ее изменения составляет:
 - при гармонических модулирующих сигналах cosγ, sinγ;
- при гармонических модулирующих сигналах cosγ, sinγ;
 - при трехпозиционных модулирующих сигналах C(γ), S(γ).
- при трехпозиционных модулирующих сигналах C(γ), S(γ).
Величина максимально возможной результирующей команды в вертикальной плоскости составляет:
 - при гармонических модулирующих сигналах cosγ, sinγ;
- при гармонических модулирующих сигналах cosγ, sinγ;
 - при трехпозиционных модулирующих сигналах С(γ), S(γ).
- при трехпозиционных модулирующих сигналах С(γ), S(γ).
Недостатками способа, представленного в прототипе (с модуляцией трехпозиционными сигналами), при использовании в СН пропорционального ПРО являются:
скачкообразный характер изменения выходного сигнала управления V, вид которого соответствует виду модулирующего сигнала одного из каналов при нулевом сигнале управления в другом канале (например, С(γ) при hz=0 с точностью до амплитуды сигнала hy), что ухудшает функционирование пропорционального ПРО;
уменьшение максимально возможной команды управления по сравнению с применением гармонических модулирующих сигналов.
Критерием «неплавности» сигнала V может служить соотношение амплитуд высших и первой гармоник. Для известного способа амплитуда третьей гармоники составляет 1/3 амплитуды полезного сигнала.
Указанные недостатки снижают точность наведения ракет с пропорциональным ПРО.
Задачей предлагаемого изобретения является формирование более плавного (с точки зрения уменьшения амплитуды высших гармоник) сигнала управления на ПРО по сравнению с прототипом при одновременном увеличении максимально возможной команды управления за счет изменение вида модулирующих сигналов, что в результате повышает точность наведения ракет. При этом сохраняется признак прототипа по использованию четырех точных отсчетов по углу крена за период вращения ракеты, т.е. с дискретностью по углу крена π/2.
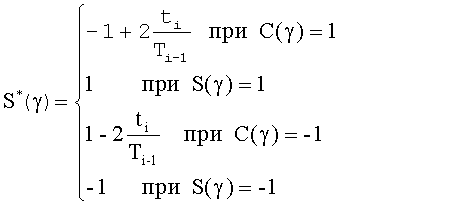
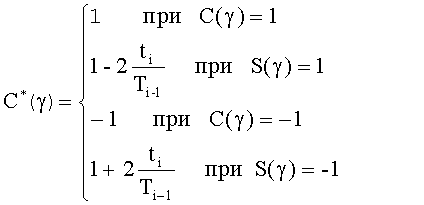
Поставленная задача решается за счет того, что по сравнению с известным способом наведения вращающейся ракеты, включающим формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и горизонтальной плоскостях, формирование периодических по углу крена ракеты релейных трехпозиционных сигналов С(γ) и S(γ), сдвинутых друг относительно друга на угол π/2, модуляцию сигналов управления в вертикальной и горизонтальной плоскостях, суммирование промодулированных сигналов и преобразование полученного сигнала в отклонение рулевого органа, в предлагаемом способе наведения определяют длительности Т1, Т2…Ti-1, Ti четвертей периода вращения ракеты по углу крена между каждыми фронтами сигнала S(γ), а модуляцию сигналов управления в вертикальной и горизонтальной плоскостях осуществляют сигналами С∗(γ) и S∗(γ) соответственно, формируемыми по зависимостям
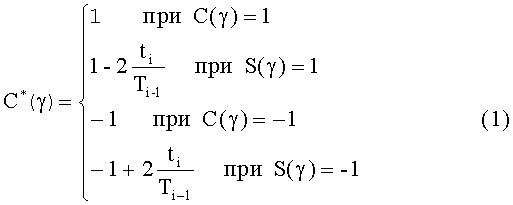
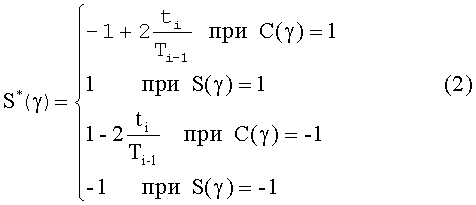
где ti - время на текущей четверти периода, отсчитываемое от начала каждого фронта сигнала S(γ);
Ti-1 - длительность предыдущей четверти периода.
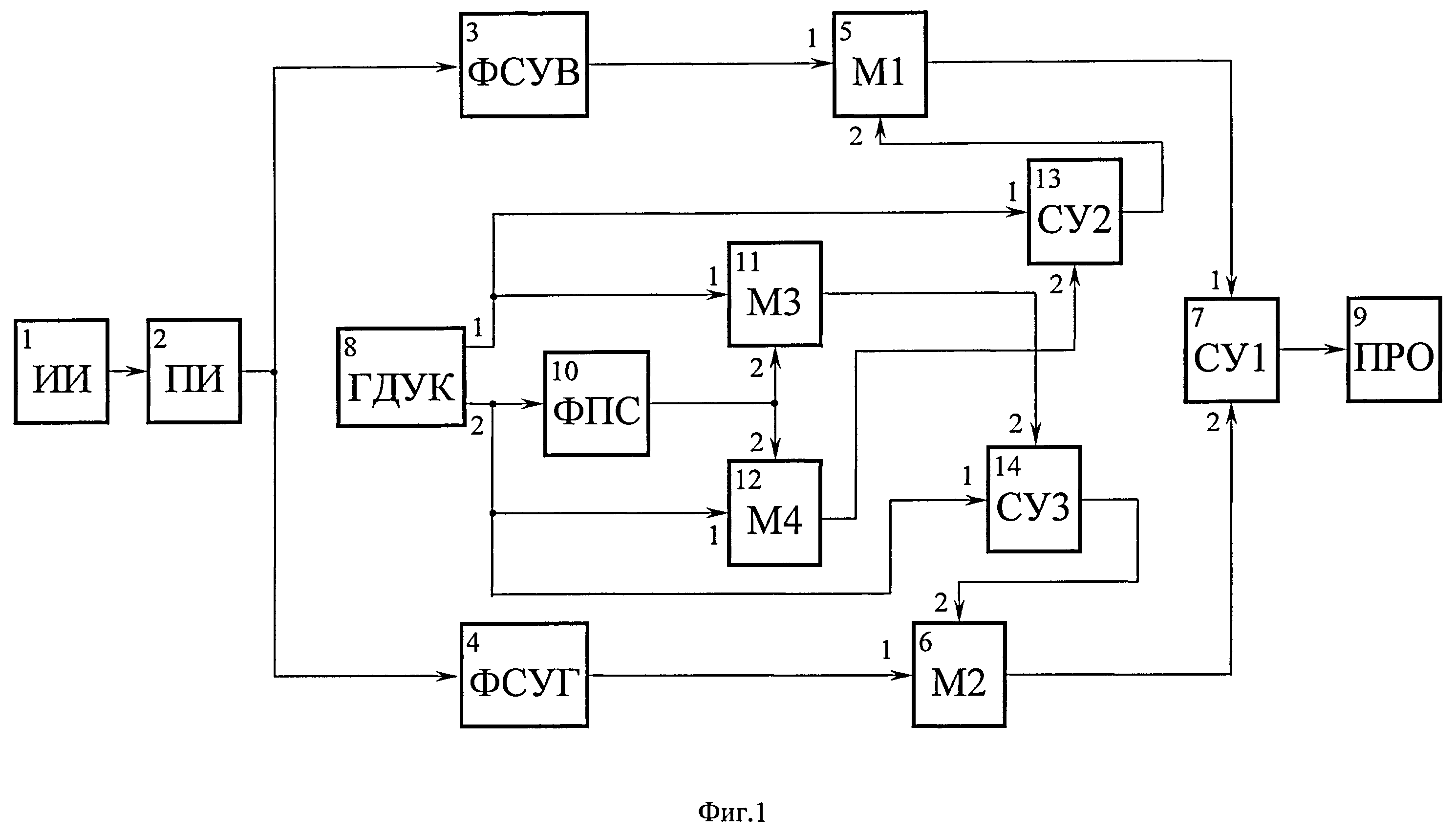
В СН, реализующую этот способ, по сравнению с известной СН, включающей источник излучения на пусковом устройстве, оптически связанный с ним приемник излучения, формирователи сигналов управления в вертикальной и горизонтальной плоскостях, входы которых соединены с выходом приемника излучения, а выходы соединены с первыми входами соответственно первого и второго модуляторов, суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, а также привод рулевого органа и гироскопический датчик угла крена, причем сигналы с первого и второго выходов гироскопического датчика угла крена являются релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2, введены третий и четвертый модуляторы, первые входы которых соединены соответственно с первым и вторым выходами гироскопического датчика угла крена, формирователь пилообразного сигнала, вход которого соединен со вторым выходом гироскопического датчика угла крена, а выход соединен со вторыми входами третьего и четвертого модуляторов, второй и третий суммирующие усилители, первые входы которых соединены соответственно с первым и вторым выходами гироскопического датчика угла крена, вторые входы соединены соответственно с выходами четвертого и третьего модуляторов, а выходы соединены со вторыми входами соответственно первого и второго модуляторов, при этом выход первого суммирующего усилителя соединен с приводом рулевого органа.
Сущность предлагаемой совокупности технических решений заключается в том, что модуляция сигналов управления производится периодическими по углу крена трапецеидальными сигналами, обеспечивающими более плавный сигнал управления V за счет снижения амплитуды высших гармоник.
Предлагаемое изобретение поясняется графическим материалом.
Структура предлагаемой СН приведена на фиг.1, где 1 - ИИ, 2 - ПИ, 3 - ФСУВ, 4 - ФСУГ, 5 - первый модулятор (Ml), 6 - второй модулятор (М2), 7 - первый СУ (СУ1), 8 - ГДУК, 9 - ПРО, 10 - формирователь пилообразного сигнала (ФПС), 11 - третий модулятор (М3), 12 - четвертый модулятор (М4), 13 - второй СУ (СУ2), 14 - третий СУ (СУ3).
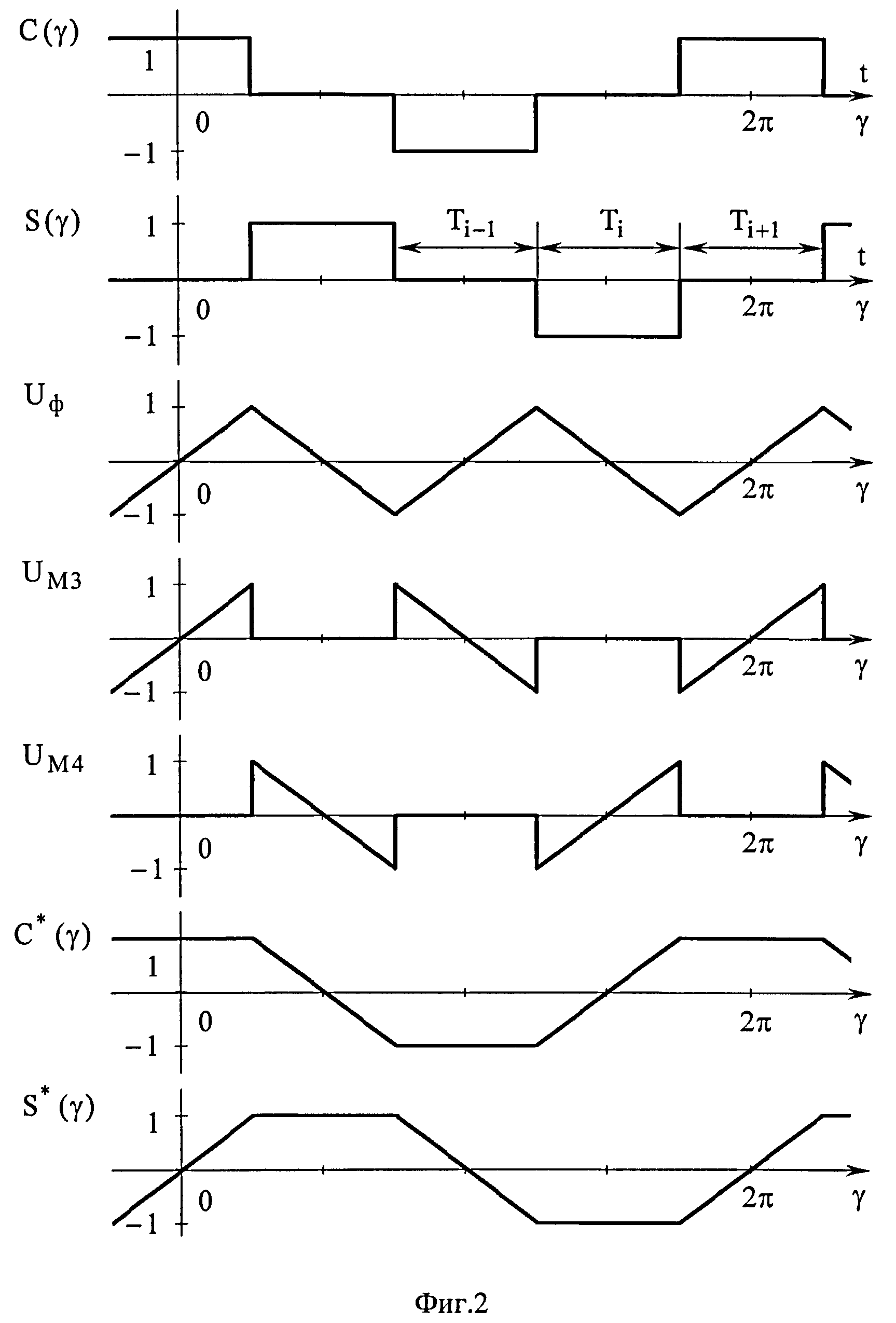
На фиг.2 представлены виды модулирующих сигналов в предлагаемом способе С∗(γ), S∗(γ) с выходов СУ2 и СУ3 соответственно и в прототипе С(γ), S(γ), а также сигналы с выходов элементов предлагаемой СН, поясняющие ее работу: Uф - с выхода ФПС, Uм3, Uм4 - с выходов М3 и М4 соответственно.
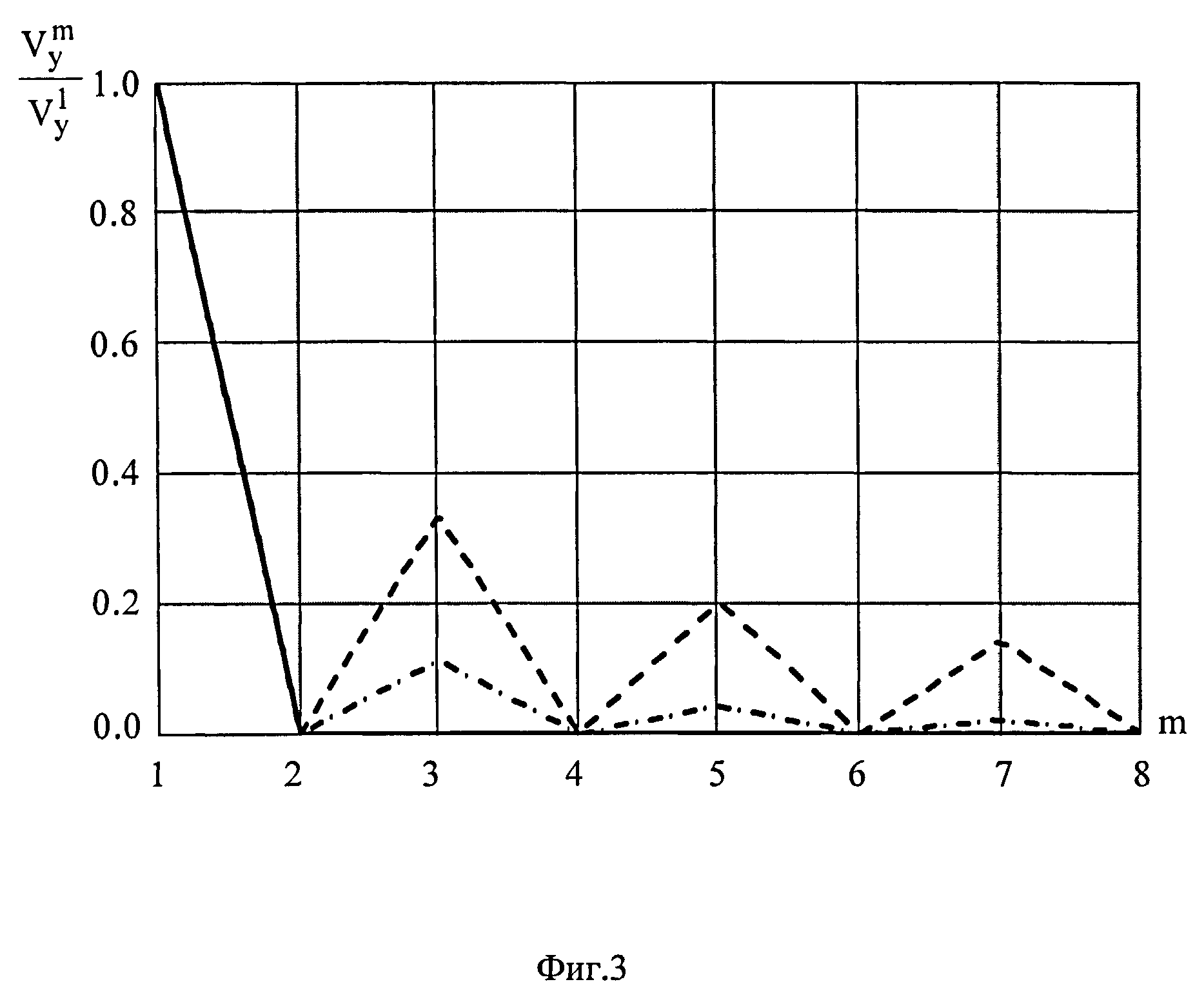
Соотношения амплитуд высших и первой гармоник выходного сигнала V приведены на фиг.3: сплошной линией - при гармонических сигналах cosγ, sinγ; пунктирной - при периодических трехпозиционных сигналах С(γ), S(γ) прототипа; штрихпунктирной - при трапецеидальных сигналах С∗(γ), S∗(γ) предлагаемого способа.
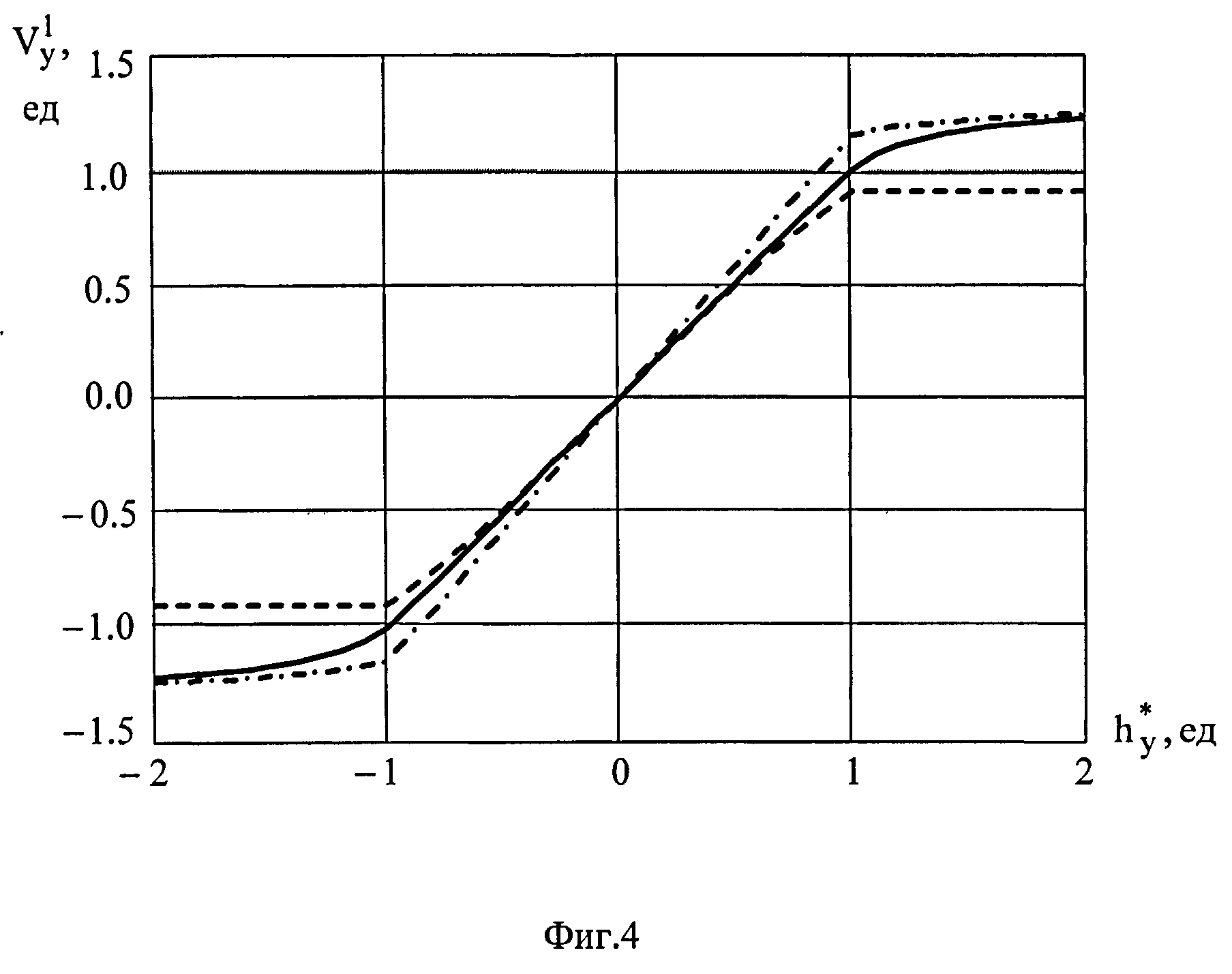
Зависимость величины результирующей команды на ПРО в вертикальной плоскости  от величины сигнала управления в этой же плоскости
от величины сигнала управления в этой же плоскости  (сигнал управления в горизонтальной плоскости нулевой) представлена на фиг.4: сплошной линией - при гармонических сигналах cosγ, sinγ; пунктирной - при периодических трехпозиционных сигналах С(γ), S(γ) прототипа; штрихпунктирной - при трапецеидальных сигналах С∗(γ), S∗(γ) предлагаемого способа.
(сигнал управления в горизонтальной плоскости нулевой) представлена на фиг.4: сплошной линией - при гармонических сигналах cosγ, sinγ; пунктирной - при периодических трехпозиционных сигналах С(γ), S(γ) прототипа; штрихпунктирной - при трапецеидальных сигналах С∗(γ), S∗(γ) предлагаемого способа.
Предлагаемая СН (фиг.1) работает следующим образом.
ПИ 2 на ракете принимает модулированное излучение, формируемое ИИ 1 на пусковом устройстве. Сигналы линейных рассогласований hy, hz между положением ракеты и осью луча с выходов ФСУВ 3 и ФСУГ 4 преобразуются из измерительной системы координат, ориентированной относительно земли, во вращающуюся связанную с ракетой систему координат путем их модуляции на M1 5 и М2 6 трапецеидальными сигналами С∗(γ), S∗(γ). Сигналы управления в вертикальной и горизонтальной плоскостях с выходов M1 5 и М2 6 суммируются на СУ1 7. Сформированный сигнал управления V поступает на ПРО 9, отклоняющий рули. Вращающаяся по углу крена ракета демодулирует отклонение рулей, в результате чего в каждой из плоскостей создается управляющий момент, соответствующий исходным сигналам hy,z.
Процесс формирования модулирующих сигналов в предлагаемом способе подробно представлен на фиг.2.
ФПС 10 формирует сигнал Uф, в виде двускатной пилы на удвоенной частоте вращения с единичной амплитудой.
На М3 11 и М4 12 производится модуляция периодических трехпозиционных сигналов С(γ), S(γ) с выходов ГДУК 8, поступающих на их первые входы, пилообразным сигналом Uф, поступающим на их вторые входы с выхода ФПС 10. Сигналы, полученные на выходах М3 11 и М4 12 (соответственно Uм3=Uф С(γ), Uм4=Uф S(γ)), поступают на вторые входы СУ3 14 и СУ2 13, а на их первые входы поступают сигналы S(γ) и С(γ) соответственно с выходов ГДУК 8. Модулирующие сигналы на выходах СУ2 и СУ3, сформированные по зависимостям
C∗(γ)=Uм4+C(γ); S∗(γ)=Uм3+S(γ),
имеют трапецеидальный вид (фиг.2) и соответствуют зависимостям (1), (2).
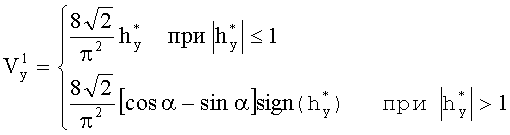
В соответствии с разложением в ряд Фурье проекции  (сигнал управления в горизонтальном канале - нулевой) при трапецеидальных модулирующих сигналах С∗(γ), S∗(γ) предлагаемого способа имеют вид:
(сигнал управления в горизонтальном канале - нулевой) при трапецеидальных модулирующих сигналах С∗(γ), S∗(γ) предлагаемого способа имеют вид:
 ,
,
где  ;
;
а величина максимальной результирующей команды в вертикальной плоскости  в линейной зоне ее изменения составляет:
в линейной зоне ее изменения составляет:
Использование в предлагаемом способе трапецеидальных модулирующих сигналов С∗(γ), S∗(γ), с одной стороны, позволяет обеспечить более плавный характер изменения сигнала управления V, поступающего на ПРО, за счет снижения амплитуд высших гармоник. Так отношение амплитуд высших нечетных «паразитных» гармоник к амплитуде первой гармоники (приведено на фиг.3) в предлагаемом способе уменьшается по сравнению с прототипом в m раз: третьей - в 3 раза (1/9 вместо 1/3), пятой - в 5 раз (1/25 вместо 1/5) и т.д. Малая амплитуда высших гармоник в предлагаемом способе фактически приближает его к способу модуляции гармоническими сигналами, но с дискретностью по точным отсчетам угла крена π/2.
С другой стороны, как видно из представленных зависимостей для  и графиков на фиг.4, предлагаемый способ наведения позволяет увеличить максимальную результирующую команду на руль при
и графиков на фиг.4, предлагаемый способ наведения позволяет увеличить максимальную результирующую команду на руль при  ; hz=0:
; hz=0:
в 1,15 раза по сравнению с использованием гармонических модулирующих функций;
в 1,27 раза по сравнению с трехпозиционными модулирующими функциями.
Это позволяет повысить эффективность управляющего момента рулей при наведении ракет с дефицитом располагаемой перегрузки. Под располагаемой перегрузкой ракеты понимается наибольшая перегрузка (ускорение) ракеты, которую она может развить при максимальном отклонении рулей / Дмитриевский А.А. Внешняя баллистика. - М.: Машиностроение, 1979, с.126/.
В качестве элементов СН могут быть использованы устройства, представленные в прототипе, в том числе ФПС, аналогичный формирователю сигнала линеаризации прототипа (с амплитудой, равной 1,0).
В качестве ФПС может быть также использован линеаризатор сигнала, представленный в патенте RU №2280226, МПК F41G 7/00 (2006.01), F42B 15/01 (2006.01) или в патенте RU №2283466, МПК F41G 7/00 (2006.01), F42B 15/01 (2006.01), Н03К 4/00 (2006.01), где изложены варианты его подробной реализации. Он представляет собой интегратор, управляемый логическими элементами, а его коэффициент интегрирования рассчитывается вычислителем по длительности четверти периода, предшествующей текущей. На время действия первой четверти периода, когда информация о длительности предыдущей четверти отсутствует, команда V на рули может быть задана принудительно.
В этих патентах также представлена реализация бесконтактного ГДУК.
Применение предлагаемого способа позволяет повысить точность наведения вращающихся по углу крена одноканальных ракет.
Жидкостный ракетный двигатель
Способ наведения вращающейся ракеты и система наведения для его осуществления
Способ формирования сигналов управления снарядом
Способ вывода ракеты в зону захвата цели головкой самонаведения и система для его осуществления (варианты)
Управляемый снаряд
Способ наведения вращающейся ракеты и система наведения для его осуществления
Объединенная двигательная установка ракетного блока
Турбокомпрессор (варианты)
Способ наведения ракет, управляемых по лучу лазера, и ракетный комплекс для его осуществления
Способ стрельбы снарядом, управляемым по лучу лазера, и оптический прицел системы наведения снаряда
Жидкостный ракетный двигатель
Способ наведения вращающейся ракеты и система наведения для его осуществления
Способ формирования сигналов управления снарядом
Способ вывода ракеты в зону захвата цели головкой самонаведения и система для его осуществления (варианты)
Управляемый снаряд
Способ наведения вращающейся ракеты и система наведения для его осуществления
Объединенная двигательная установка ракетного блока
Турбокомпрессор (варианты)
Способ наведения ракет, управляемых по лучу лазера, и ракетный комплекс для его осуществления
Способ стрельбы снарядом, управляемым по лучу лазера, и оптический прицел системы наведения снаряда

